Заявляемое изобретение относится к радиолокационной технике. Оно может быть использовано в радиолокационных станциях сопровождения целей и ракет (ССЦР) из состава зенитно-ракетных комплексов, одной из функций которых является сопровождение и измерение координат зенитных управляемых ракет (ЗУР). В изобретении предлагается способ захвата ЗУР на сопровождение после пуска. На начальном этапе пуска положение ЗУР может быть предсказано с определенными погрешностями и захват ее на сопровождение основной антенной ССЦР является сложной технической задачей, поскольку эта антенна имеет узкую диаграмму направленности, предназначенную для обеспечения точного сопровождения ЗУР и целей.
Известен способ захвата на сопровождение ЗУР в радиолокационной станции сопровождения целей и ракет, реализованный в зенитной пушечно-ракетной боевой машине [1].
В данном способе для захвата ЗУР на начальном участке используют антенну ввода ракеты (АВР) в виде фазированной антенной решетки (ФАР) с изменяемой шириной диаграммы направленности (10° и 3°). При этом после пуска ЗУР на начальном этапе используют для определения координат ЗУР широкую диаграмму направленности, затем после захвата ЗУР на сопровождение используют более узкую диаграмму направленности АВР, что повышает точность измерения координат ЗУР, после чего переходят на точное сопровождение узким лучом основной антенны (OA).
Недостатком данного способа является необходимость использования АВР с относительно узкой диаграммой направленности, что приводит к необходимости увеличения апертуры ФАР АВР, габаритов и стоимости АВР в целом. При этом остается вероятность захвата ЗУР боковыми лепестками диаграммы направленности OA. В случае захвата ЗУР боковыми лепестками диаграммы направленности антенны (ДНА) невозможно правильно измерить ее координаты, навести на цель и выполнить боевую задачу.
Известен способ захвата на сопровождение ЗУР в радиолокационной станции сопровождения целей и ракет, реализованный в зенитной пушечно-ракетной боевой машине [2], принятый в качестве прототипа. В состав ССЦР входят основная антенна, реализованная в виде ФАР с узким лучом, обеспечивающим точные измерения координат ЗУР, антенна ввода ракеты, реализованная в виде ФАР с широким лучом, обеспечивающим захват ракеты на начальном участке полета с учетом возможного разброса траекторий полета ЗУР, приемник OA, приемник АВР, устройство обработки сигналов и управления (УОУ) и передатчик. ЗУР на борту имеет радиолокационный приемоответчик (РПО).
После принятия решения об обстреле цели боевая машина (БМ) осуществляет пуск ЗУР и одновременно выдает в ССЦР начальные координаты ЗУР на траектории полета - точку «встреливания» (дальность, скорость и две угловые координаты: азимут и угол места). АВР устанавливает луч в точку «встреливания». OA передает на ЗУР запросные посылки (ЗП), используя потенциал боковых лепестков своей диаграммы направленности (ДН). ЗУР после приема запросных посылок излучает ответный сигнал (ОС) посредством расположенного на ее борту радиолокационного приемоответчика. АВР принимает излученный радиолокационным приемоответчиком сигнал. С выходов АВР сигналы поступают на входы приемника АВР, усиливаются с преобразованием частоты и с его выходов поступают на входы УОУ, в котором вычисляются координаты ЗУР, УОУ управляет положением луча АВР, обеспечивая захват ЗУР. Далее УОУ устанавливает луч OA в то направление, в котором АВР захватила ЗУР, и производится излучение запросной посылки на ЗУР главным лепестком диаграммы направленности OA. Радиолокационный приемоответчик ЗУР после приема запросной посылки от OA излучает ответный сигнал, который принимается ФАР OA. С выходов OA КВЧ-сигналы поступают на входы приемника OA, усиливаются в нем с преобразованием частоты и с его выходов поступают на входы УОУ. УОУ определяет точные координаты ЗУР, обеспечивает ее захват и дальнейшее сопровождение OA ССЦР.
Недостатком данного способа является невысокая точность измерения координат ЗУР на начальном участке полета при помощи АВР, которая имеет широкую диаграмму направленности, что приводит к низкой точности первоначальных установок луча OA в направлении на ЗУР и возможности захвата ЗУР боковыми лепестками диаграммы направленности OA. В случае захвата ЗУР боковыми лепестками ДНА невозможно правильно измерить ее координаты, навести на цель и выполнить боевую задачу.
Задачей, решаемой предлагаемым изобретением, является исключение захвата ЗУР на сопровождение боковыми лепестками основной антенны.
Поставленная задача решается применением в ССЦР основной антенны с ФАР, имеющей возможность расширения луча, и введением проверки сопровождения ЗУР боковыми лепестками OA.
В способе захвата на сопровождение ЗУР одновременно с пуском ЗУР выдают в ССЦР прогнозируемые начальные координаты ЗУР на траектории полета, устанавливают луч ФАР АВР, имеющей широкую диаграмму направленности, в прогнозируемое направление, с помощью ФАР OA, имеющей узкую диаграмму направленности, передают на ЗУР запросные посылки, принимают антенной ввода ракеты ответный сигнал, излученный радиолокационным приемоответчиком, находящимся на борту ЗУР, определяют координаты ЗУР, устанавливают луч АВР в прогнозируемое по измеренным координатам ЗУР направление, обеспечивая сопровождение ЗУР антенной ввода ракеты, устанавливают луч OA в прогнозируемое по измеренным АВР координатам направление, и производят излучение запросной посылки на ЗУР, принимают OA ответный сигнал радиолокационного приемоответчика ЗУР, излучаемый им после приема запросной посылки, определяют точные координаты ЗУР, устанавливают луч OA в прогнозируемое по измеренным OA координатам направление, обеспечивая сопровождение ЗУР основной антенной, при этом используют ФАР OA с возможностью расширения луча, расширенный луч OA включают при пуске ЗУР, устанавливают расширенный луч OA в прогнозируемое по измеренным АВР координатам направление, производят излучение запросной посылки на ЗУР, принимают расширенным лучом OA ответный сигнал радиолокационного приемоответчика ЗУР, определяют уточненные координаты ЗУР, устанавливают расширенный луч OA в прогнозируемое направление, определенное по измеренным расширенным лучом OA координатам, обеспечивают сопровождение ЗУР расширенным лучом OA, после захвата на сопровождение расширенным лучом OA включают узкий луч OA и продолжают сопровождать ЗУР узким лучом OA. Кроме того, сопровождение антенной ввода ракеты продолжают после захвата на сопровождение ЗУР основной антенной, определяют отношение уровней ответных сигналов, принятых OA и АВР, при превышении этим отношением заданного порога, определяемого из соотношения коэффициентов усиления OA и АВР, а также уровня боковых лепестков OA, принимают решение о нахождении ЗУР в основном лепестке диаграммы направленности OA и продолжают сопровождать ЗУР основной антенной, в противоположном случае устанавливают луч OA по координатам ЗУР, полученным от АВР, до тех пор, пока не будет принято решение о нахождении ЗУР в основном лепестке диаграммы направленности OA.
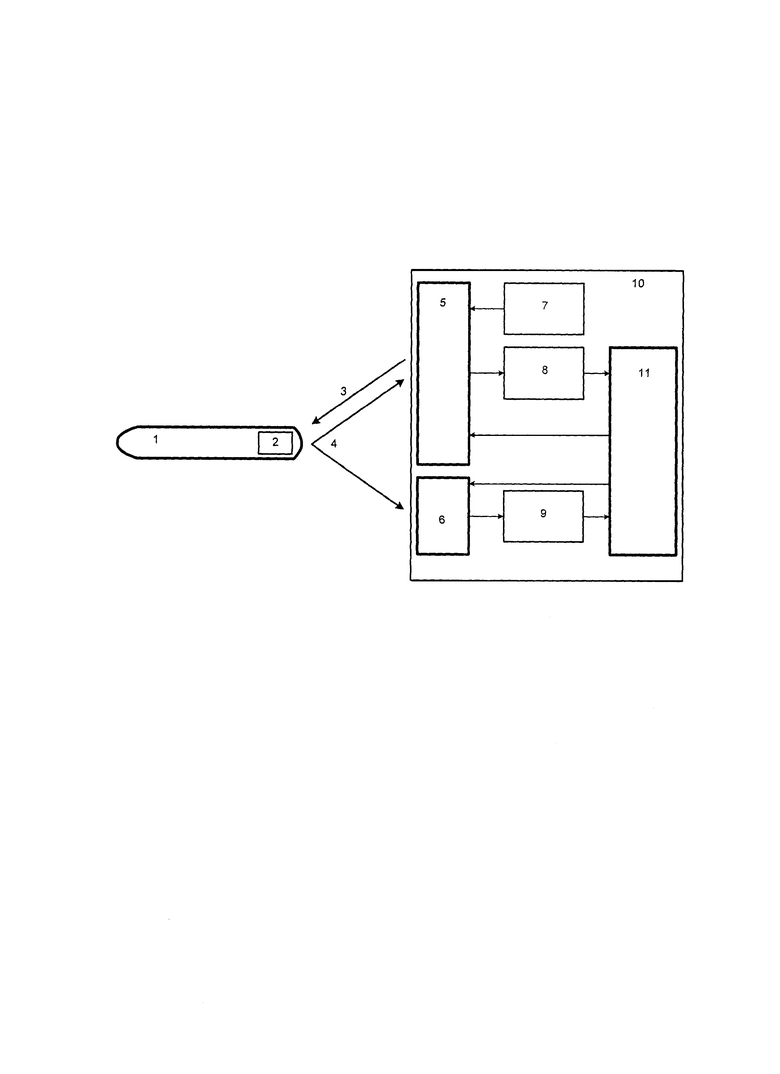
Сущность изобретения поясняется фигурой, на которой представлена схема, поясняющая взаимодействие составных частей ССЦР и ЗУР при реализации предлагаемого способа захвата на сопровождение ЗУР, где поз. 1 - ЗУР, поз. 2 - РПО, поз. 3 - запросные посылки, поз. 4 - ответный сигнал, поз. 5 - OA, поз. 6 - АВР, поз. 7 - передатчик, поз. 8 - приемник OA, поз. 9 -приемник АВР, поз. 10 - ССЦР, поз. 11 - УОУ.
Заявляемый способ осуществляют следующим образом.
Одновременно с пуском ЗУР 1 выдают прогнозируемые начальные координаты ЗУР 1 на траектории полета в УОИ 11, входящее в состав ССЦР 10, по команде УОИ 11 устанавливают луч ФАР АВР 6, имеющей широкую диаграмму направленности (ДН), в прогнозируемое направление на ЗУР 1. Ширину главного лепестка ДН АВР 6 выбирают, исходя из возможного разброса положения ЗУР 1 относительно прогнозируемых координат, например, 10° по половинной мощности.
С помощью ФАР OA 5, имеющей узкую ДН, передают на ЗУР 1 запросные посылки 3. Запросные посылки 3 формируют в передатчике 7, который подключен к OA 5. Ширину ДН OA 5 выбирают, исходя из требуемой точности измерения координат ЗУР 1 и целей, например, 0,5° по половинной мощности. Поскольку на начальном участке полета ЗУР 1 не известны ее точные координаты, невозможно навести основной лепесток ДН OA 5 точно на ЗУР 1. Поэтому на начальном участке полета ЗУР 1 запросные посылки 3 предаются через боковые лепестки ДН OA 5.
На борту ЗУР 1 принимают с помощью РПО 2 запросные посылки 3 и передают ответный сигнал 4. Принимают антенной ввода ракеты 6 ответный сигнал 4, усиливают и преобразуют по частоте ответный сигнал 4 в приемнике АВР 9, передают в УОУ 11, в котором определяют координаты ЗУР 1, по команде из УОУ 11 устанавливают луч АВР 6 в прогнозируемое по измеренным координатам ЗУР 1 направление, обеспечивая сопровождение ЗУР 1 антенной ввода ракеты б. Для измерения угловых координат ЗУР 1 в АВР 6 и OA 5 может использоваться, например, моноимпульсный метод [3].
СКО ошибок измерения угловых координат при моноимпульсном методе измерения может быть определено по формуле [3, с. 136]:
где:  - ширина главного лепестка ДН по уровню половинной мощности, Рс - мощность сигнала, Рш - мощность шума.
- ширина главного лепестка ДН по уровню половинной мощности, Рс - мощность сигнала, Рш - мощность шума.
Для АВР 6 в рассматриваемом примере  СКО угловых координат, измеренных АВР 6, при отношении сигнал/шум 20 дБ (100 раз по мощности) составит 1°, что больше ширины ДН узкого луча OA 5, и это не позволяет точно выставить луч OA 5 в направлении на ЗУР 1. Для обеспечения захвата ЗУР 1 основной антенной 5 используют расширение ее ДН, например, до 2° по половинной мощности. Расширение ДНА может быть осуществлено, например, методами, приведенными в [4].
СКО угловых координат, измеренных АВР 6, при отношении сигнал/шум 20 дБ (100 раз по мощности) составит 1°, что больше ширины ДН узкого луча OA 5, и это не позволяет точно выставить луч OA 5 в направлении на ЗУР 1. Для обеспечения захвата ЗУР 1 основной антенной 5 используют расширение ее ДН, например, до 2° по половинной мощности. Расширение ДНА может быть осуществлено, например, методами, приведенными в [4].
Расширенный луч OA 5 устанавливают в прогнозируемое по измеренным АВР 6 координатам направление, и производят излучение запросной посылки 3 на ЗУР 1, принимают OA 5 ответный сигнал 4 РПО 2 ЗУР 1, усиливают и преобразуют по частоте ответный сигнал 4 в приемнике OA 8, передают в УОУ 11, в котором определяют уточненные координаты ЗУР 1, по команде из УОУ 11 устанавливают расширенный луч OA 5 в прогнозируемое по измеренным OA 5 координатам ЗУР 1 направление, обеспечивая сопровождение ЗУР 1 основной антенной 5. Использование расширенного луча OA 5 позволяет уменьшить вероятность захвата ЗУР 1 боковым лепестком OA 5 по сравнению со случаем, когда захват по данным АВР 6 осуществляют узким лучом OA 5.
СКО угловых координат, измеренных расширенным лучом OA 5 (Θ0,5=2°), при отношении сигнал/шум 20 дБ составит 0,2°, что меньше ширины ДНА узкого луча OA 5 (Θ0,5=0,5°). Это позволяет перейти на сопровождение ЗУР 1 узким лучом OA 5.
После осуществления захвата на сопровождение основной антенной 5 с расширенным лучом включают узкий луч и продолжают сопровождать ЗУР 1 узким лучом OA 5. Условием перехода на сопровождение узким лучом может быть, например, сопровождение расширенным лучом не менее 10 ответных сигналов 4 ЗУР 1.
Несмотря на расширение луча OA 5 на начальном участке существует вероятность захвата на сопровождение ЗУР 1 боковыми лепестками ДН OA 5. Также сохраняется вероятность захвата боковым лепестком при переходе сопровождения с широкого на узкий луч OA 5. Для полного исключения сопровождения боковыми лепестками OA 5 после захвата на сопровождение ЗУР 1 основной антенной 5 продолжают сопровождать ЗУР 1 антенной ввода ракеты 6, в УОУ 11 сравнивают уровни ответных сигналов 4, принятых OA 5 и АВР 6. Заранее зная коэффициенты усиления OA 5 и АВР 6, можно определить пороговое значение отношения уровней ответного сигнала ЗУР 1, принятого OA 5 и АВР 6, которое будет характеризовать, находится ли ЗУР 1 в пределах основного лепестка OA 5 или в боковых лепестках.
Реализация способа поясняется с помощью примера.
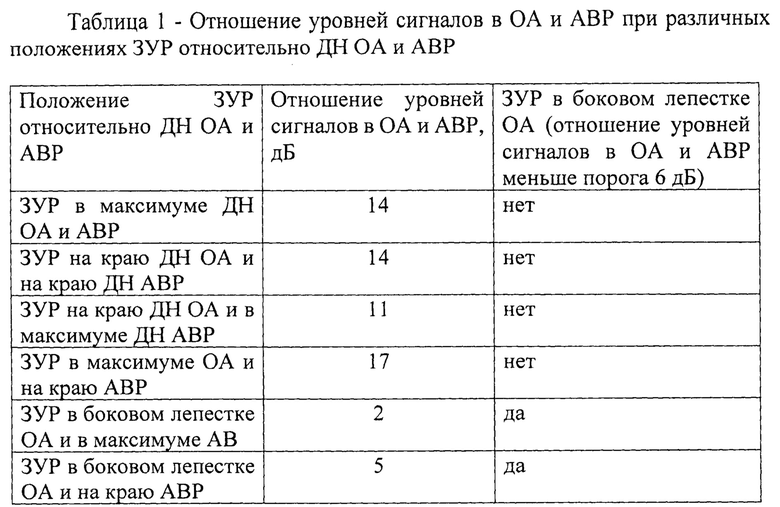
В рассматриваемом примере АВР имеет коэффициент усиления 20 дБ, широкий луч OA имеет коэффициент усиления 34 дБ, максимальный уровень боковых лепестков OA составляет -12 дБ (коэффициент усиления в боковом лепестке 22 дБ). В случае нахождения ЗУР в максимумах ДН АВР и OA, отношение уровней ответных сигналов составит 34-20=14 дБ, в случае нахождения ЗУР в максимуме ДН АВР и на краю ДН OA (по уровню -3 дБ), отношение уровней ответных сигналов составит 34-3-20=11 дБ. В случае нахождения ЗУР в максимуме ДН АВР и максимальном боковом лепестке ДН OA, отношение уровней ответных сигналов составит 34-20-12=2 дБ. Выбрав пороговое значение отношения уровней ответного сигнал ЗУР, принятого OA и АВР равным, например, 6 дБ, можно считать, что, если указанное отношение больше 6 дБ, значит ЗУР сопровождается главным лепестком ДН OA, а если меньше - то в боковом. Отношение уровней сигналов в OA и АВ при различных положениях ЗУР относительно ДН OA и АВР и результат определения нахождения в боковом лепестке ДН OA показаны в таблице 1.
Если принимают решение о нахождении ЗУР в главном лепестке диаграммы направленности OA, то продолжают сопровождать ЗУР основной антенной, в противоположном случае устанавливают луч OA по координатам ЗУР, полученным от АВР, до тех пор, пока не будет принято решение о нахождении ЗУР в основном лепестке диаграммы направленности OA. Таким образом решается задача полного исключения захвата ЗУР на сопровождение боковыми лепестками основной антенны.
Использованная литература:
1. Зенитная пушечно-ракетная боевая машина. Патент РФ №2191973, МПК F41H 7/00, опубл. 27.10.2002.
2. Зенитная пушечно-ракетная боевая машина. Патент РФ №2348001, МПК F41H 11/02, опубл. 27.02.2009.
3. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация - М. Радио и связь, 1984.
4. Грибанов А. Н. Фазовый синтез лучей специальной формы в фазированных антенных решетках бортовых РЛС - Диссертация на соискание ученой степени кандидата технических наук, Москва-2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2007 |
|
RU2348001C1 |
| Система сопровождения целей и ракет зенитной боевой машины | 2019 |
|
RU2710994C1 |
| Зенитная ракетно-пушечная боевая машина | 2016 |
|
RU2618663C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2006 |
|
RU2321818C1 |
| ЗЕНИТНАЯ РАКЕТНО-ПУШЕЧНАЯ БОЕВАЯ МАШИНА | 2015 |
|
RU2584404C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2009 |
|
RU2394202C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2000 |
|
RU2191973C2 |
| Способ юстировки информационных средств зенитной боевой машины и устройство для юстировки информационных средств зенитной боевой машины | 2017 |
|
RU2670242C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| Станция сопровождения целей и наведения ракет | 2018 |
|
RU2680918C1 |
Заявляемое изобретение относится к радиолокационной технике и может быть использовано в радиолокационных станциях сопровождения целей и ракет (ССЦР) из состава зенитно-ракетных комплексов, одной из функций которых является сопровождение и измерение координат зенитных управляемых ракет (ЗУР). Техническим результатом является исключение захвата ЗУР на сопровождение боковыми лепестками основной антенны, а также снижение габаритов и стоимости антенны ввода ракеты, используемой для реализации способа. В заявленном способе одновременно с пуском ЗУР выдают в ССЦР прогнозируемые начальные координаты ЗУР на траектории полета, устанавливают луч ФАР антенны ввода ракеты (АВР), имеющей широкую диаграмму направленности, в прогнозируемое направление, с помощью ФАР основной антенны (OA), имеющей узкую диаграмму направленности, передают на ЗУР запросные посылки. Принимают антенной ввода ракеты ответный сигнал, излученный радиолокационным приемоответчиком, находящимся на борту ЗУР, определяют координаты ЗУР. При этом используют ФАР OA с возможностью расширения луча, который включают при пуске ЗУР. Устанавливают расширенный луч OA в прогнозируемое по измеренным АВР координатам направление, производят излучение запросной посылки на ЗУР, принимают расширенным лучом OA ответный сигнал радиолокационного приемоответчика ЗУР и определяют уточненные координаты ЗУР. Устанавливают расширенный луч OA в прогнозируемое направление, обеспечивают сопровождение ЗУР расширенным лучом основной антенны. После захвата на сопровождение расширенным лучом OA включают узкий луч OA и продолжают сопровождать ЗУР узким лучом OA. Сопровождение антенной ввода ракеты продолжают после захвата на сопровождение ЗУР основной антенной, определяют отношение уровней ответных сигналов, принятых OA и АВ. При превышении этим отношением заданного порога, определяемого из соотношения коэффициентов усиления основной антенны и АВР, а также уровня боковых лепестков OA, принимают решение о нахождении ЗУР в основном лепестке диаграммы направленности OA и продолжают сопровождать ЗУР основной антенной. В противоположном случае устанавливают луч OA по координатам ЗУР, полученным от АВР, до тех пор, пока не будет принято решение о нахождении ЗУР в основном лепестке диаграммы направленности OA. 1 ил., 1 табл.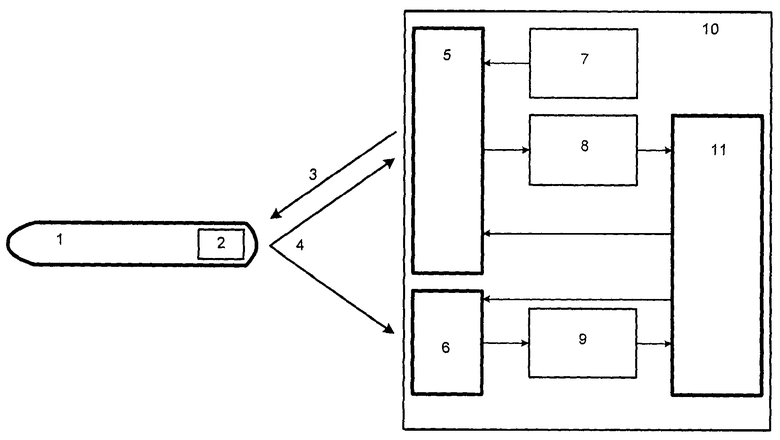
Способ захвата на сопровождение зенитной управляемой ракеты (ЗУР) в радиолокационной станции сопровождения целей и ракет (ССЦР), при котором одновременно с пуском ЗУР выдают в ССЦР прогнозируемые начальные координаты ЗУР на траектории полета, устанавливают луч фазированной антенной решетки (ФАР) антенны ввода ракеты (АВР), имеющей широкую диаграмму направленности, в прогнозируемое направление, с помощью ФАР основной антенны (OA), имеющей узкую диаграмму направленности, передают на ЗУР запросные посылки, принимают антенной ввода ракеты ответный сигнал, излученный радиолокационным приемоответчиком, находящимся на борту ЗУР, определяют координаты ЗУР, устанавливают луч АВР в прогнозируемое по измеренным координатам ЗУР направление, обеспечивая сопровождение ЗУР антенной ввода ракеты, устанавливают луч OA в прогнозируемое по измеренным АВР координатам направление и производят излучение запросной посылки на ЗУР, принимают OA ответный сигнал радиолокационного приемоответчика ЗУР, излучаемый им после приема запросной посылки, определяют точные координаты ЗУР, устанавливают луч OA в прогнозируемое по измеренным OA координатам направление, обеспечивают сопровождение ЗУР основной антенной, отличающийся тем, что используют ФАР OA с возможностью расширения луча, который включают при пуске ЗУР, устанавливают в прогнозируемое по измеренным АВР координатам направление, производят излучение запросной посылки на ЗУР, производят излучение запросной посылки на ЗУР, принимают расширенным лучом OA ответный сигнал радиолокационного приемоответчика ЗУР, определяют уточненные координаты ЗУР, устанавливают расширенный луч OA в прогнозируемое направление, определенное по измеренным расширенным лучом OA координатам, обеспечивают сопровождение ЗУР расширенным лучом основной антенны, после захвата на сопровождение расширенным лучом OA включают узкий луч OA и продолжают сопровождать ЗУР узким лучом OA, при этом сопровождение антенной ввода ракеты продолжают после захвата на сопровождение ЗУР основной антенной, определяют отношение уровней ответных сигналов, принятых OA и АВР, при превышении этим отношением заданного порога, определяемого из соотношения коэффициентов усиления основной антенны и антенны ввода ракеты, а также уровня боковых лепестков OA принимают решение о нахождении ЗУР в основном лепестке диаграммы направленности OA и продолжают сопровождать ЗУР основной антенной, в противоположном случае устанавливают луч OA по координатам ЗУР, полученным от АВР, до тех пор, пока не будет принято решение о нахождении ЗУР в основном лепестке диаграммы направленности OA.
| Система сопровождения целей и ракет зенитной боевой машины | 2019 |
|
RU2710994C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2007 |
|
RU2348001C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТОЙ СРЕДНЕЙ ДАЛЬНОСТИ С АКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПРИ НАВЕДЕНИИ НА ГРУППОВУЮ СОСРЕДОТОЧЕННУЮ ЦЕЛЬ | 2012 |
|
RU2570115C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2011 |
|
RU2463622C1 |
| JP 2002214325 A, 31.07.2002 | |||
| WO 2013105093 A1, 18.07.2013 | |||
| Способ изготовления полировальных кругов из сфагнумового торфа | 1930 |
|
SU23819A1 |
