Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству управления движением и к способу управления движением, которые управляют движением транспортного средства.
Уровень техники
[0002] Относительно этого вида устройства, известна обычная технология, которая включает в себя получение первого управляющего порогового значения на основе первой степени риска слева от транспортного средства и второго управляющего порогового значения на основе второй степени риска справа от транспортного средства (патентный документ 1: JP5070171B). Первое управляющее пороговое значение и второе управляющее пороговое значение представляют расстояние от края дороги. Первое управляющее пороговое значение изменяется к первому объекту слева от транспортного средства по мере того, как вторая степень риска увеличивается, в то время как второе управляющее пороговое значение изменяется ко второму объекту справа от транспортного средства по мере того, как первая степень риска увеличивается.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP5070171B
Сущность изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, в вышеописанной обычной технологии, когда объекты не присутствуют справа и слева от рассматриваемого транспортного средства, рассматриваемое транспортное средство управляется таким образом, что оно постоянно движется в центре полосы движения. Следовательно, когда рассматриваемое транспортное средство изменяет свой курс на ответвлении, таком как перекресток, рассматриваемое транспортное средство должно двигаться в центре полосы движения до момента непосредственно перед изменением курса и внезапно изменять курс на ответвлении. Такое внезапное изменение курса расходится с ожиданием пассажиров относительно следования движению при изменении курса и вызывает некомфортное ощущение у пассажиров, что может быть проблематичным.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять устройство управления движением и способ управления движением, которые позволяют отклонять позицию движения рассматриваемого транспортного средства в полосе движения к стороне изменения курса рассматриваемого транспортного средства, когда рассматриваемое транспортное средство изменяет свой курс на ответвлении дороги.
Средство для решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему следующим образом. Позиция движения рассматриваемого транспортного средства управляется в соответствии с областями управления. Области управления задаются со ссылкой на разделительную линию, пересекающую линию направления ширины, которая включает в себя точку изменения курса и протягивается на предварительно определенное расстояние/длину. Рассматриваемое транспортное средство начинает изменение курса в точке изменения курса, которая расположена впереди рассматриваемого транспортного средства в направлении движения. Области управления содержат одну область на стороне изменения курса и другую область. Относительно ширин областей управления, отношение (WR/WT) ширины WR другой к ширине WT одной задается выше ширин областей управления до сих пор.
Преимущества изобретения
[0007] Согласно настоящему изобретению, когда позиция движения рассматриваемого транспортного средства управляется в соответствии с областями управления, которые задаются со ссылкой на разделительную линию, ширины областей управления задаются с возможностью иметь вышеуказанную взаимосвязь. С другой стороны, разделительная линия, пересекающая линию направления ширины, включает в себя точку изменения курса и идет на предварительно определенное расстояние, и рассматриваемое транспортное средство начинает изменение курса в точке изменения курса, которая расположена впереди рассматриваемого транспортного средства в направлении движения. Следовательно, когда рассматриваемое транспортное средство управляется таким образом, что оно изменяет свой курс в точке изменения курса, позиция движения рассматриваемого транспортного средства отклоняется к стороне изменения курса. Эта операция совпадает с ощущением при вождении пассажиров рассматриваемого транспортного средства и может уменьшать некомфортное ощущение, возникающее у пассажиров.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой системы управления движением согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2A является видом сверху, иллюстрирующим пример областей управления, которые задаются со ссылкой на разделительные линии рядом с рассматриваемым транспортным средством.
Фиг. 2B является видом сверху для описания примера процесса для того, чтобы управлять рассматриваемым транспортным средством таким образом, что оно объезжает объезжаемый объект.
Фиг. 2C является видом сверху для описания другого примера процесса для того, чтобы управлять рассматриваемым транспортным средством таким образом, что оно объезжает объезжаемый объект.
Фиг. 3 является видом сверху, иллюстрирующим пример областей управления, которые задаются со ссылкой на разделительные линии рядом с Y-образным перекрестком (точкой изменения курса).
Фиг. 4 является видом сверху, иллюстрирующим пример областей управления, которые задаются со ссылкой на разделительные линии рядом с развязкой (точкой изменения курса).
Фиг. 5 является видом сверху, иллюстрирующим пример областей управления, которые задаются со ссылкой на разделительные линии рядом со съездом с шоссе (точкой изменения курса).
Фиг. 6 является видом сверху для описания процесса для рассматриваемого транспортного средства, которое движется через Y-образный перекресток при объезде другого транспортного средства, которое проезжает мимо рассматриваемого транспортного средства.
Фиг. 7 является видом сверху для описания процесса для рассматриваемого транспортного средства, которое движется через Y-образный перекресток при объезде встречного транспортного средства.
Фиг. 8 является видом сверху для описания процесса для рассматриваемого транспортного средства, которое движется через развязку после объезда припаркованного транспортного средства.
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления для управления движением рассматриваемого транспортного средства.
Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей вложенную процедуру этапа S105 по фиг. 9.
Оптимальный режим осуществления изобретения
[0009] Далее описаны один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, настоящее изобретение описывается посредством примерной иллюстрации примеров, в которых устройство управления движением для транспортного средства согласно настоящему изобретению применяется к системе управления движением, оборудованной в транспортном средстве. Варианты осуществления устройства управления движением согласно настоящему изобретению не ограничены и также могут применяться к портативному терминальному устройству, которое может обмениваться информацией со стороной транспортного средства. Устройство управления движением, система управления движением и портативное терминальное устройство представляют собой компьютер, который выполняет процесс вычисления.
[0010] Фиг. 1 является схемой, иллюстрирующей блочную конфигурацию системы 1 управления движением согласно одному или более вариантов осуществления настоящего изобретения. Система 1 управления движением оборудована в транспортном средстве и содержит устройство 100 управления движением и бортовое устройство 200.
[0011] Устройство 100 управления движением согласно одному или более вариантов осуществления настоящего изобретения имеет функцию недопущения выезда за пределы полосы движения (функцию помощи для удержания на полосе движения), чтобы распознавать полосу движения, в которой движется рассматриваемое транспортное средство, и управлять поведением при передвижении рассматриваемого транспортного средства, с тем чтобы поддерживать определенную взаимосвязь между позицией разделительной линии полосы движения и позицией рассматриваемого транспортного средства. Устройство 100 управления движением согласно одному или более вариантов осуществления настоящего изобретения управляет поведением при передвижении рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство движется по центру полосы движения. Устройство 100 управления движением может управлять поведением при передвижении рассматриваемого транспортного средства таким образом, что расстояние от разделительной линии полосы движения до рассматриваемого транспортного средства в направлении ширины дороги попадает в предварительно определенный диапазон.
Устройство 100 управления движением и бортовое устройство 200 имеют устройства 20 и 40 связи, соответственно, и обмениваются информацией между собой через проводную или беспроводную связь.
[0012] Сначала описывается бортовое устройство 200.
Бортовое устройство 200 согласно одному или более вариантов осуществления настоящего изобретения содержит устройство 50 обнаружения, датчик 60, контроллер 70 транспортного средства, устройство 80 приведения в движение, устройство 90 рулевого управления, устройство 110 вывода и навигационное устройство 120. Эти устройства, которые составляют бортовое устройство 200, соединяются между собой через CAN (контроллерную сеть) или другую бортовую LAN, чтобы взаимно обмениваться информацией.
[0013] Ниже описываются эти устройства, которые составляют бортовое устройство 200.
Устройство 50 обнаружения обнаруживает присутствие одной или более разделительных линий и их позиции присутствия и также обнаруживает присутствие одного или более объезжаемых объектов, которые должно объезжать рассматриваемое транспортное средство, и их позиции присутствия. Устройство 50 обнаружения согласно одному или более вариантов осуществления настоящего изобретения включает в себя, но не только, камеру 51. Камера 51 согласно одному или более вариантов осуществления настоящего изобретения представляет собой, например, камеру, которая содержит элемент формирования изображений, такой как CCD (ПЗС-матрица). Камера 51 согласно одному или более вариантов осуществления настоящего изобретения, которая устанавливается в рассматриваемом транспортном средстве, захватывает изображения рядом с рассматриваемым транспортным средством и получает данные изображений, которые включают в себя разделительные линии и объезжаемые объекты, присутствующие рядом с рассматриваемым транспортным средством. Ниже описываются конкретные примеры и т.п. "разделительных линий" и "объезжаемых объектов", описанных в одном или более вариантов осуществления настоящего изобретения.
[0014] Устройство 50 обнаружения извлекает позиции разделительных линий рядом с рассматриваемым транспортным средством и позиции объезжаемых объектов, которые присутствуют рядом с рассматриваемым транспортным средством, к примеру, посредством анализа данных изображений, захваченных посредством камеры 51. Позиции объезжаемых объектов включают в себя позиции относительно разделительных линий, которые задают полосу движения.
[0015] Помимо этого, устройство 50 обнаружения вычисляет расстояние от рассматриваемого транспортного средства до объезжаемого объекта на основе позиции объезжаемого объекта относительно рассматриваемого транспортного средства. Дополнительно, устройство 50 обнаружения также может вычислять относительную скорость и относительное ускорение между рассматриваемым транспортным средством и объезжаемым объектом из варьирования во времени позиции объезжаемого объекта. Что касается процесса для того, чтобы вычислять позиционную взаимосвязь между рассматриваемым транспортным средством и другим транспортным средством на основе данных изображений, и процесса для того, чтобы вычислять информацию скорости на основе величины варьирования во времени позиционной взаимосвязи, могут надлежащим образом использоваться схемы, известные на момент подачи настоящей заявки.
[0016] Помимо этого или альтернативно, устройство 50 обнаружения может анализировать данные изображений и идентифицировать классификацию объезжаемого объекта на основе результата анализа. Устройство 50 обнаружения может использовать технологию сопоставления с шаблоном и т.п. для того, чтобы идентифицировать то, представляет собой объезжаемый объект, включенный в данные изображений, транспортное средство, пешехода или дорожный знак либо нет.
[0017] Устройство 50 обнаружения согласно одному или более вариантов осуществления настоящего изобретения может использовать радарное устройство 52 в качестве замены для вышеописанной камеры 51 или вместе с камерой 51 для того, чтобы обнаруживать позицию и т.п. объезжаемого объекта. Примеры радарного устройства 52 могут представлять собой такие примеры, как радар миллиметрового диапазона, лазерный радар и ультразвуковой радар, которые известны на момент подачи настоящей заявки.
[0018] В одном или более вариантов осуществления настоящего изобретения, информация, включающая в себя позиции разделительных линий, обнаруженные посредством устройства 50 обнаружения, и информация, включающая в себя позиции объезжаемых объектов, отправляется на сторону устройства 100 управления движением. Информация, передаваемая из устройства 50 обнаружения в устройство 100 управления движением, включает в себя, в дополнение к информации относительно позиций разделительных линий и объезжаемых объектов, информацию скорости и информацию ускорения объезжаемых объектов, информацию относительно классификации объезжаемых объектов и информацию относительно типа транспортного средства и т.п., когда объезжаемые объекты представляют собой транспортные средства.
[0019] "Разделительная линия" в одном или более вариантов осуществления настоящего изобретения не ограничена, при условии что она имеет функцию для того, чтобы задавать полосу движения. Разделительная линия может представлять собой линию, проведенную на поверхности дороги, насаждения, которые присутствуют между полосами движения, или дорожное сооружение, которое присутствует но стороне обочины дороги полосы движения, такое как дорожное ограждение, бордюрный камень, тротуар и дорога с ограниченным доступом для двух колес. Разделительная линия также может представлять собой фиксированную конструкцию, которая присутствует но стороне обочины дороги полосы движения, такую как рекламный модуль, дорожный знак, магазин и придорожное дерево.
[0020] "Объезжаемый объект" в одном или более вариантов осуществления настоящего изобретения означает объект, который рассматриваемое транспортное средство должно объезжать при движении (так что рассматриваемое транспортное средство не приближается чрезмерно к объекту). Объезжаемые объекты в одном или более вариантов осуществления настоящего изобретения включают в себя стационарный объект и движущийся объект. Примеры стационарного объекта включают в себя другие транспортные средства, которые паркуются или останавливаются; дорожное оборудование, к примеру, дорожные знаки и опоры линии электропередач или телефонной линии; временные объекты на дороге, к примеру, падающие объекты и убранный снег; и стоящие пешеходы, которые могут быть помехами для движения транспортного средства. Примеры движущегося объекта включают в себя движущиеся другие транспортные средства и идущих пешеходов. Примеры таких других транспортных средств включают в себя двухколесные транспортные средства, к примеру, велосипеды и мотоциклы; крупногабаритные транспортные средства, к примеру, автобусы и грузовики; транспортные средства специального назначения, к примеру, прицепы и вагоны-краны; транспортные средства аварийных служб, к примеру, машины скорой помощи; пожарные машины и патрульные машины; и автомобили стандартного размера. Примеры объезжаемых объектов дополнительно включают в себя варианты, в которых объекты необязательно могут присутствовать, но которые должно объезжать рассматриваемое транспортное средство, к примеру, стройплощадки, поврежденные области дорог и водяные ямы. Когда рассматриваемое транспортное средство V1 движется, объезжаемые объекты транспортных средств включают в себя едущие впереди транспортные средства, едущие сзади транспортные средства и встречные транспортные средства.
[0021] Датчик 60 согласно одному или более вариантов осуществления настоящего изобретения содержит датчик 61 угла поворота при рулении и датчик 62 скорости транспортного средства. Датчик 61 угла поворота при рулении обнаруживает информацию руления относительно руления, такую как величина руления, скорость руления и ускорение при рулении рассматриваемого транспортного средства, и отправляет информацию руления в контроллер 70 транспортного средства и устройство 100 управления движением. Датчик 62 скорости транспортного средства обнаруживает скорость и ускорение рассматриваемого транспортного средства и отправляет их в контроллер 70 транспортного средства и устройство 100 управления движением.
[0022] Контроллер 70 транспортного средства согласно одному или более вариантов осуществления настоящего изобретения представляет собой бортовой компьютер, к примеру, модуль управления двигателем (ECU), и электронно управляет состоянием приведения в движение транспортного средства. Транспортное средство согласно одному или более вариантов осуществления настоящего изобретения может представлять собой, например, электромобиль, имеющий электромотор в качестве источника приведения в движение, автомобиль с двигателем, имеющий двигатель внутреннего сгорания в качестве источника приведения в движение, или гибридный автомобиль, имеющий как электромотор, так и двигатель внутреннего сгорания в качестве источников приведения в движение. Примеры электромобиля и гибридного автомобиля, имеющего электромотор в качестве источника приведения в движение, включают в себя тип, в котором источник питания для электромотора представляет собой аккумуляторную батарею, и тип, в котором источник питания для электромотора представляет собой топливный элемент.
[0023] Устройство 80 приведения в движение согласно одному или более вариантов осуществления настоящего изобретения содержит приводной механизм рассматриваемого транспортного средства V1. Приводной механизм включает в себя электромотор и/или двигатель внутреннего сгорания в качестве вышеописанного источника приведения в движение, устройство передачи мощности, включающее в себя ведущий вал и автоматическую трансмиссию, которые передают выходную мощность источника приведения в движение на ведущие колеса, и тормозное устройство 81, которое тормозит колеса. Устройство 80 приведения в движение формирует соответствующие управляющие сигналы для этих компонентов приводного механизма и выполняет управление движением, включающее в себя ускорение и замедление транспортного средства. Эти управляющие сигналы для приводного механизма формируются на основе входных сигналов посредством операции нажатия педали акселератора и операции нажатия педали тормоза водителя и управляющих сигналов, полученных из контроллера 70 транспортного средства или из устройства 100 управления движением. Информация команд может отправляться в устройство 80 приведения в движение, которое за счет этого может автоматически выполнять управление движением, включающее в себя ускорение и замедление транспортного средства. В случае гибридного автомобиля, устройство 80 приведения в движение может принимать отношение крутящего момента, выводимого в электромотор, и крутящего момента, выводимого в двигатель внутреннего сгорания, в соответствии с состоянием движения транспортного средства.
[0024] Устройство 90 рулевого управления согласно одному или более вариантов осуществления настоящего изобретения имеет исполнительное устройство рулевого управления. Исполнительное устройство рулевого управления включает в себя мотор и другие обязательные компоненты, присоединенные к валу рулевой колонки. Устройство 90 рулевого управления выполняет управление рулением для транспортного средства на основе управляющего сигнала, полученного из контроллера 70 транспортного средства, или входного сигнала посредством операции руления водителя. Контроллер 70 транспортного средства отправляет информацию команд, включающую в себя величину руления, в устройство 90 рулевого управления, чтобы за счет этого выполнять управление рулением. Помимо этого или альтернативно, устройство 100 управления движением может управлять величиной торможения для каждого колеса транспортного средства, чтобы за счет этого выполнять управление рулением. В этом случае, контроллер 70 транспортного средства отправляет информацию команд, включающую в себя величину торможения для каждого колеса, в тормозное устройство 81, чтобы за счет этого выполнять управление рулением для транспортного средства.
[0025] Навигационное устройство 120 согласно одному или более вариантов осуществления настоящего изобретения вычисляет целевой маршрут из текущей позиции рассматриваемого транспортного средства в пункт назначения и выводит информацию направления по целевому маршруту через устройство 110 вывода, которое описывается ниже. Навигационное устройство 120 имеет устройство 121 обнаружения позиции, информацию 122 дороги, включающую в себя тип дороги, ширину дороги, форму дороги и т.п., и картографическую информацию 123, в которой информация 122 дороги ассоциирована с каждой точкой. Устройство 121 обнаружения позиции согласно одному или более вариантов осуществления настоящего изобретения реагирует на данные глобальной системы позиционирования (GPS) и обнаруживает позицию (широту и долготу), в которой движется транспортное средство. Навигационное устройство 120 указывает соединение дорог, по которому движется рассматриваемое транспортное средство, на основе текущей позиции рассматриваемого транспортного средства, обнаруженной посредством устройства 121 обнаружения позиции. Информация 122 дороги согласно одному или более вариантов осуществления настоящего изобретения сохраняется таким образом, что идентификационная информация для каждого соединения дорог ассоциирована с типом дороги, шириной дороги, формой дороги, тем, разрешается или нет обгон (разрешается или нет смена полосы движения на смежную полосу движения), и другой связанной с дорогой информацией. Навигационное устройство 120 обращается к информации 122 дороги, с тем чтобы получать информацию относительно дороги, которой принадлежит соединение дорог, по которому движется рассматриваемое транспортное средство, и отправляет информацию в устройство 100 управления движением. Тип дороги, ширина дороги и форма дороги для дороги, по которой движется рассматриваемое транспортное средство, используются в процессе управления движением, чтобы вычислять целевой маршрут, по которому должно двигаться рассматриваемое транспортное средство.
[0026] Устройство 110 вывода согласно одному или более вариантов осуществления настоящего изобретения выводит различные информационные элементы относительно помощи при движении пользователю или пассажирам окружающих транспортных средств. В одном или более вариантов осуществления настоящего изобретения, устройство 110 вывода выводит один или более информационных элементов из информации в соответствии с позициями разделительных линий, информации в соответствии с позициями объезжаемых объектов и информации относительно управления движением для рассматриваемого транспортного средства посредством устройства 100 управления движением.
[0027] Устройство 110 вывода согласно одному или более вариантов осуществления настоящего изобретения включает в себя дисплей 111, динамик 112, внешние лампы 113 и внутренние лампы 114. Внешние лампы 113 включают в себя передние фары, указатели поворота и стоп-сигналы. Внутренние лампы 114 включают в себя подсвечивающиеся лампочки индикаторов и подсвечивающиеся лампочки дисплея 111, а также лампы, предоставленные на рулевом механизме, и лампы, предоставленные рядом с рулевым механизмом. Устройство 110 вывода согласно одному или более вариантов осуществления настоящего изобретения может выводить различные информационные элементы относительно помощи при движении во внешние устройства, к примеру, интеллектуальные транспортные системы (ITS) через устройство 40 связи. Внешние устройства, к примеру, интеллектуальные транспортные системы используют информацию относительно помощи при движении, включающую в себя скорость транспортного средства, информацию руления, целевой маршрут движения и т.д., для управления трафиком множества транспортных средств.
[0028] Ниже описываются конкретные формы вывода информации со ссылкой на пример, в котором другое движущееся транспортное средство в качестве объезжаемого объекта присутствует спереди слева относительно движущегося рассматриваемого транспортного средства.
Устройство 110 вывода предоставляет пассажирам рассматриваемого транспортного средства направление и/или позицию, в которой присутствует другое транспортное средство, в качестве информации в соответствии с позицией объезжаемого объекта. Дисплей 111 отображает направление и/или позицию, в которой присутствует другое транспортное средство, в форме, которая может визуально распознаваться. Динамик 112 читает текст, который информирует касательно направления и/или позиции, в которой присутствует другое транспортное средство, к примеру, "Доводим до вашего сведения, что другое транспортное средство присутствует спереди слева". Из числа ламп, предоставленных в качестве внешних ламп 113 в левом и правом боковых зеркалах, только левосторонняя лампа может мигать, чтобы информировать пассажиров рассматриваемого транспортного средства касательно того, что другое транспортное средство присутствует спереди слева. Из числа ламп, предоставленных в качестве внутренних ламп 114 слева и справа около рулевого механизма, только левосторонняя лампа может мигать, чтобы информировать пассажиров касательно того, что другое транспортное средство присутствует спереди слева.
[0029] Позиция и/или тип разделительной линии могут выводиться в качестве информации в соответствии с позицией разделительной линии, чтобы сообщать пассажирам рассматриваемого транспортного средства эту информацию через дисплей 111, динамик 112, внешние лампы 113 и/или внутренние лампы 114.
[0030] Кроме того, пассажиры рассматриваемого транспортного средства или пассажиры других транспортных средств могут заранее информироваться касательно того, что должна выполняться операция руления и/или ускорение или замедление, в качестве информации относительно управления движением для рассматриваемого транспортного средства V1 посредством устройства 100 управления движением, через дисплей 111, динамик 112, внешние лампы 113 и/или внутренние лампы 114.
[0031] Таким образом, посредством вывода информации относительно управления движением для рассматриваемого транспортного средства V1, пассажиры рассматриваемого транспортного средства и/или других транспортных средств могут заранее информироваться касательно поведения рассматриваемого транспортного средства. Устройство 110 вывода может выводить вышеописанную информацию во внешние устройства, такие как интеллектуальные транспортные системы, через устройство 20 связи. Это обеспечивает возможность пассажирам рассматриваемого транспортного средства и/или пассажирам других транспортных средств реагировать на поведение рассматриваемого транспортного средства, которое находится под управлением движением.
[0032] Далее описывается устройство 100 управления движением согласно одному или более вариантов осуществления настоящего изобретения.
[0033] Как проиллюстрировано на фиг. 1, устройство 100 управления движением согласно одному или более вариантов осуществления настоящего изобретения содержит устройство 10 управления, устройство 20 связи и устройство 30 вывода. Устройство 20 связи обменивается информацией с бортовым устройством 200. Устройство 30 вывода имеет функцию, аналогичную функции вышеописанного устройства 110 вывода бортового устройства 200. Когда устройство 100 управления движением представляет собой компьютер, который может носиться пассажиром, устройство 100 управления движением может выводить, в каждое устройство, информацию команд для управления миганием внешних ламп 113 и/или внутренних ламп 114 бортового устройства.
[0034] В устройстве 100 управления движением согласно одному или более вариантов осуществления настоящего изобретения, устройство 10 управления планирует целевой маршрут для инструктирования рассматриваемому транспортному средству V1 двигаться в полосе движения дороги и обеспечивает движение рассматриваемого транспортного средства V1 по целевому маршруту, чтобы за счет этого выполнять управление движением для рассматриваемого транспортного средства V1. Целевой маршрут надлежащим образом обновляется посредством устройства 10 управления в то время, когда рассматриваемое транспортное средство V1 движется.
[0035] Устройство 10 управления из устройства 100 управления движением представляет собой компьютер, содержащий: ROM 12 (постоянное запоминающее устройство), которое сохраняет программы для представления различной управляющей информации по движению в соответствии со степенью близости между рассматриваемым транспортным средством и другим транспортным средством; CPU 11 (центральный процессор) в качестве функциональной схемы, которая выполняет программы, сохраненные в ROM 12, так что она выступает в качестве устройства 100 управления движением; и RAM 13 (оперативное запоминающее устройство), которое выступает в качестве доступного устройства хранения данных.
[0036] Устройство 10 управления из устройства 100 управления движением согласно одному или более вариантов осуществления настоящего изобретения имеет функцию получения информации рассматриваемого транспортного средства, функцию получения информации объектов, функцию получения информации разделительных линий, функцию задания областей управления, функцию задания областей объекта, функцию планирования маршрута, функцию управления и функцию представления. Устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения выполняет каждую функцию посредством взаимодействия программного обеспечения для реализации вышеуказанных функций и вышеописанных аппаратных средств.
[0037] Ниже описывается каждая функция устройства 100 управления движением согласно одному или более вариантов осуществления настоящего изобретения.
Во-первых, описывается функция получения информации рассматриваемого транспортного средства устройства 10 управления. Устройство 10 управления получает информацию, которая включает в себя позицию рассматриваемого транспортного средства, в качестве информации рассматриваемого транспортного средства. Позиция рассматриваемого транспортного средства может получаться посредством устройства 121 обнаружения позиции навигационного устройства 120. Вышеприведенная информация рассматриваемого транспортного средства дополнительно включает в себя скорость и ускорение транспортного средства для рассматриваемого транспортного средства. Устройство 10 управления получает скорость рассматриваемого транспортного средства из датчика 62 скорости транспортного средства. Скорость рассматриваемого транспортного средства также может получаться на основе варьирования во времени позиции рассматриваемого транспортного средства. Ускорение рассматриваемого транспортного средства может получаться из скорости рассматриваемого транспортного средства.
[0038] Ниже описывается функция получения информации объектов устройства 10 управления. Устройство 10 управления получает информацию объектов, которая включает в себя позицию объезжаемого объекта, который должно объезжать рассматриваемое транспортное средство. Устройство 10 управления получает информацию, которая включает в себя позицию объезжаемого объекта, обнаруженного посредством устройства 50 обнаружения, в качестве информации объектов. Вышеуказанная информация объектов дополнительно включает в себя относительную позицию, относительную скорость и относительное ускорение объезжаемого объекта.
[0039] Когда объезжаемый объект представляет собой другое транспортное средство, и это другое транспортное средство и рассматриваемое транспортное средство допускают связь между транспортными средствами (связь, в которой множество транспортных средств могут непосредственно обмениваться данными между собой без использования сервера и т.п.), устройство 10 управления рассматриваемого транспортного средства может получать, в качестве информации объектов, скорость и ускорение транспортного средства для другого транспортного средства, обнаруженные посредством датчика скорости транспортного средства для другого транспортного средства. Следует понимать, что устройство 10 управления также может получать информацию объезда, которая включает в себя позицию, скорость и ускорение другого транспортного средства, из внешних устройств, к примеру, из интеллектуальных транспортных систем (ITS).
[0040] Ниже описывается функция получения информации разделительных линий устройства 10 управления. В одном или более вариантов осуществления настоящего изобретения, устройство 10 управления получает информацию, которая включает в себя позиции разделительных линий, обнаруженных посредством устройства 50 обнаружения, в качестве информации разделительных линий.
[0041] Ниже описываются функция задания областей управления, функция задания областей объекта и функция планирования маршрута устройства 10 управления. В одном или более вариантов осуществления настоящего изобретения, устройство 10 управления сначала использует функцию задания областей управления для того, чтобы задавать области управления со ссылкой на разделительные линии, и использует функцию задания областей объекта для того, чтобы задавать область объекта для объезжаемого объекта. Затем устройство 10 управления планирует целевой маршрут RT, по которому должно двигаться рассматриваемое транспортное средство V1, на основе местоположений областей управления и местоположения области объекта.
[0042] В способе планирования целевого маршрута RT, устройство 10 управления планирует целевой маршрут RT, который проходит между областями управления, которые планируются со ссылкой на разделительные линии, присутствующие рядом с рассматриваемым транспортным средством. Фиг. 2A является видом в плане сверху, иллюстрирующим окружение, в котором рассматриваемое транспортное средство V1 движется в полосе Ln1 движения. Устройство 10 управления задает, как проиллюстрировано на фиг. 2A, области R1 и R2 управления со ссылкой на разделительные линии, которые задают полосу Ln1 движения, в которой движется рассматриваемое транспортное средство V1. Когда дорога, по которой движется рассматриваемое транспортное средство V1, является прямой дорогой (дорогой без ответвления), устройство 10 управления планирует целевой маршрут RT, на котором рассматриваемое транспортное средство V1 управляется таким образом, что оно движется около центра между областями R1 и R2 управления.
[0043] При обнаружении того, что объезжаемый объект (другое транспортное средство V2) присутствует рядом с рассматриваемым транспортным средством V1, как проиллюстрировано на фиг. 2B, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения планирует целевой маршрут RT, который обеспечивает возможность рассматриваемому транспортному средству V1 объезжать объезжаемый объект. Фиг. 2B является видом при просмотре сверху окружения обнаружения другого транспортного средства V2, которое паркуется на левосторонней обочине дороги полосы Ln1 движения для рассматриваемого транспортного средства. Обнаруженное другое транспортное средство V2 присутствует в полосе Ln1 движения для рассматриваемого транспортного средства V1 и ввиду этого представляет собой объезжаемый объект, который должно объезжать рассматриваемое транспортное средство V1, поскольку другое транспортное средство V2 должно создавать помехи рассматриваемому транспортному средству V1, едущему по прямой вперед. В окружении, проиллюстрированном на фиг. 2B, устройство 10 управления может планировать целевой маршрут RT таким образом, чтобы объезжать область RV2 объекта, которая задается посредством функции задания областей объекта (т.е. таким образом, чтобы проезжать мимо рядом с областью RV2 объекта). Альтернативно, устройство 10 управления может планировать целевой маршрут RT таким образом, чтобы объезжать другое транспортное средство V2 (т.е. таким образом, чтобы проезжать мимо рядом другого транспортного средства V2) в соответствии с позицией другого транспортного средства V2 без задания области объекта RV2).
[0044] В способе планирования целевого маршрута RT, устройство 10 управления может планировать целевой маршрут RT, например, посредством вычисления одной или более целевых координат и соединения текущей позиции рассматриваемого транспортного средства V1 и целевых координат.
[0045] Вышеописанная область объекта может задаваться с учетом недопущения состояния, в котором расстояние между рассматриваемым транспортным средством V1 и объезжаемым объектом становится меньше предварительно определенного значения, так что они приближаются друг к другу или контактируют друг с другом, либо также может задаваться с учетом необходимости для рассматриваемого транспортного средства V1 и объезжаемого объекта поддерживать соответствующее расстояние. В одном или более вариантов осуществления настоящего изобретения, область объекта может иметь форму, которая аналогично соответствует внешней форме объезжаемого объекта, либо также может иметь форму, которая включает в себя объезжаемый объект. Устройство 10 управления может задавать границу области объекта в качестве формы, которая аналогично соответствует внешней форме объезжаемого объекта, либо в качестве формы, которая включает в себя объезжаемый объект, к примеру, в качестве круглой формы, эллиптической формы, прямоугольной формы и многоугольной формы. Область объекта может задаваться небольшой таким образом, что граница области объекта является отстоящей от поверхности (внешнего края) объезжаемого объекта менее чем на предварительно определенное расстояние (A), либо также может задаваться большой таким образом, что граница области объекта является отстоящей от объезжаемого объекта на предварительно определенное расстояние B (B>A) или более.
[0046] В одном или более вариантов осуществления настоящего изобретения, устройство 10 управления может вычислять целевой маршрут RT таким образом, что рассматриваемое транспортное средство V1 не въезжает в область объекта, которая задается для объезжаемого объекта, может вычислять целевой маршрут RT таким образом, что область, в которой область объекта и возможная область присутствия рассматриваемого транспортного средства V1 перекрывают друг друга, меньше предварительно определенного значения, может вычислять последовательность позиций, отстоящих от границы области объекта на предварительно определенное расстояние, в качестве целевого маршрута RT, либо может вычислять саму границу области объекта в качестве целевого маршрута RT. Как описано выше, область объекта задается таким образом, что расстояние между рассматриваемым транспортным средством V1 и объезжаемым объектом не становится меньше предварительно определенного значения, либо таким образом, что расстояние между рассматриваемым транспортным средством V1 и объезжаемым объектом поддерживается равным предварительно определенному пороговому значению. Следовательно, целевой маршрут RT также задается в местоположении, в котором расстояние между рассматриваемым транспортным средством V1 и объезжаемым объектом не становится меньше предварительно определенного значения, или в местоположении, в котором расстояние между рассматриваемым транспортным средством V1 и объезжаемым объектом поддерживается равным предварительно определенному пороговому значению.
[0047] В вышеописанном примере по фиг. 2B, описан примерный случай, в котором другое транспортное средство V2 в качестве объезжаемого объекта представляет собой припаркованное транспортное средство, которое присутствует в полосе Ln1 движения для рассматриваемого транспортного средства, но также и в случаях, если объезжаемый объект присутствует в полосе движения, отличной от полосы Ln1 движения для рассматриваемого транспортного средства, или если объезжаемый объект движется, область RT объекта задается для объезда объезжаемого объекта. В одном или более вариантов осуществления настоящего изобретения, устройство 10 управления использует функцию управления, которая описывается ниже, для того чтобы управлять рассматриваемым транспортным средством V1 таким образом, что оно движется по целевому маршруту RT, который планируется вышеуказанным способом.
[0048] Когда, как проиллюстрировано на фиг. 2B, предусмотрено другое транспортное средство V3, движущееся в противоположном направлении по встречной полосе Ln2 движения относительно полосы Ln1 движения для рассматриваемого транспортного средства V1, другое транспортное средство V3 также обнаруживается в качестве объезжаемого объекта. Хотя не проиллюстрировано на чертеже, когда другое транспортное средство V3 обнаруживается в качестве объезжаемого объекта, область объекта может задаваться в пределах зоны, которая включает в себя другое транспортное средство V3, таким же образом. В этом случае, устройство 10 управления определяет то, может или нет планироваться целевой маршрут RT, который обеспечивает возможность рассматриваемому транспортному средству проезжать мимо встречного другого транспортного средства V3 при объезде другого транспортного средства V2. Если, гипотетически, выполняется определение в отношении того, что не может быть запланирован целевой маршрут RT, который обеспечивает возможность рассматриваемому транспортному средству V1 проезжать мимо встречного другого транспортного средства V3 при объезде другого транспортного средства V2, устройство 10 управления командует контроллеру 70 транспортного средства устройства 100 управления движением управлять величиной торможения каждого колеса рассматриваемого транспортного средства V1 с использованием тормозного устройства 81 устройства 80 приведения в движение и управляет рассматриваемым транспортным средством V1 таким образом, что оно останавливается не доезжая до другого транспортного средства V2 (на стороне -Y), и ожидает до тех пор, пока другое транспортное средство V3 не проедет.
[0049] В одном или более вариантов осуществления настоящего изобретения, устройство 10 управления может задавать величину объезда при объезде объезжаемого объекта, т.е. величину управления для позиции движения рассматриваемого транспортного средства V1 в направлении ширины полосы Ln1 движения, в соответствии с классификацией обнаруженного объезжаемого объекта. Например, как проиллюстрировано на фиг. 2C, когда обнаруженный объезжаемый объект представляет собой двухколесное транспортное средство V4, устройство 10 управления задает область RV4 объекта и целевой маршрут RT таким образом, что величина объезда, когда рассматриваемое транспортное средство V1 объезжает объезжаемый объект, является относительно большой.
[0050] Примеры классификации объезжаемого объекта включают в себя двухколесные транспортные средства, к примеру, велосипеды и мотоциклы; крупногабаритные транспортные средства, к примеру, автобусы и грузовики; транспортные средства специального назначения, к примеру, прицепы и вагоны-краны; транспортные средства аварийных служб, к примеру, машины скорой помощи, пожарные машины и патрульные машины; автомобили стандартного размера; и стационарные объекты (к примеру, дорожное сооружение и дорожное оборудование). В одном или более вариантов осуществления настоящего изобретения, устройство 10 управления увеличивает величину объезда при инструктировании рассматриваемому транспортному средству V1 объезжать объезжаемый объект, например, по мере того, как увеличивается степень внимания, которая требуется для водителя, с тем чтобы обеспечивать движение рассматриваемого транспортного средства V1. Степень внимания при использовании в данном документе означает значение, которое предварительно задается для каждого типа транспортного средства. С учетом безопасности дорожного движения, чем выше степень внимания, которое водитель должен сосредотачивать при вождении рассматриваемого транспортного средства V1, тем большее значение должно задаваться.
[0051] В примере задания степени внимания, например наибольшая степень внимания задается для уязвимых участников дорожного движения (таких как велосипеды и мотоциклы) и транспортных средств аварийных служб (таких как машины скорой помощи и пожарная машина), вторая наибольшая степень внимания задается для транспортных средств специального назначения (таких как прицепы и вагоны-краны) и крупногабаритных транспортных средств (таких как автобусы и грузовики), третья наибольшая степень внимания задается для автомобилей стандартного размера, и наименьшая степень внимания задается для стационарных объектов (таких как дорожное сооружение и дорожное оборудование). Такое задание обеспечивает возможность задания соответствующей величины объезда в соответствии с классификацией объезжаемого объекта, когда рассматриваемое транспортное средство V1 управляется таким образом, что оно объезжает объезжаемый объект. В ходе этой операции, чем выше степень внимания задается в соответствии с классификацией объезжаемого объекта, тем более заблаговременное время может задаваться для инструктирования рассматриваемому транспортному средству V1 начинать объезд объезжаемого объекта.
[0052] Как указано выше, в одном или более вариантов осуществления настоящего изобретения, области управления, область объекта и целевой маршрут RT задаются/планируются с использованием устройства 10 управления.
[0053] Как проиллюстрировано на фиг. 3, настоящее изобретение может применяться к ответвлению, такому как Y-образный перекресток (который означает Y-образное трехстороннее скрещение, но настоящее изобретение может применяться к T-образному трехстороннему скрещению, и описание приводится с Y-образным перекрестком в качестве образца). Такое ответвление представляет точку TP изменения курса. В точке TP изменения курса, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения извлекает разделительную линию, пересекающую линию направления ширины, которая включает в себя точку TP изменения курса и идет на предварительно определенное расстояние/длину. Рассматриваемое транспортное средство V1 начинает изменение курса в точке TP изменения курса, которая расположена впереди рассматриваемого транспортного средства V1 в его направлении движения. Области управления задаются со ссылкой на извлеченную разделительную линию. Устройство 10 управления регулирует ширины областей управления, чтобы за счет этого планировать целевой маршрут RT таким образом, что когда рассматриваемое транспортное средство V1 управляется таким образом, что оно изменяет свой курс в точке TP изменения курса, позиция движения рассматриваемого транспортного средства отклоняется к стороне изменения курса. В одном или более вариантов осуществления настоящего изобретения, точка TP изменения курса означает точку, в которой рассматриваемое транспортное средство V1 начинает изменение курса, т.е. как проиллюстрировано посредством пунктирных двух пунктирных линий в окружности по фиг. 3, точку, в которой рассматриваемое транспортное средство V1 начинает поворот (когда изменение курса выполняется на основе разности частот вращения между правым и левым ведущими колесами, как описано ниже, "поворот", когда изменение курса выполняется с использованием руля, "руление"). В настоящем примере, линия в направлении ширины дороги, в котором варьируется кривизна дороги, проиллюстрирована как представляющая точку TP изменения курса в описательных целях, к примеру, на фиг. 3.
[0054] Здесь, фиг. 3 иллюстрирует окружение, в котором рассматриваемое транспортное средство V1 движется к Y-образному перекрестку и изменяет курс вправо на Y-образном перекрестке. На фиг. 3, области R3-R5 управления задаются со ссылкой на соответствующие разделительные линии, которые присутствуют на дороге, по которой движется рассматриваемое транспортное средство V1, и разделительные линии, присутствующие около Y-образного перекрестка, укрупняются и иллюстрируются в кружке.
[0055] В одном или более вариантов осуществления настоящего изобретения, в частности, область R4 управления на стороне изменения курса рассматриваемого транспортного средства V1 (справа от рассматриваемого транспортного средства V1) задается, как проиллюстрировано на фиг. 3, таким образом, что она имеет уменьшенную ширину WT в пределах зоны, заданной посредством предварительно определенного расстояния d1 от точки TP изменения курса до рассматриваемого транспортного средства V1. Посредством этого задания, ширина WR области R3 управления, ассоциированная с шириной WT области R4 управления в пределах этой зоны, является относительно большой, и целевой маршрут RT, который задается между областями R3 и R4 управления, больше отклоняется к стороне изменения курса около точки TP изменения курса. Как результат, когда рассматриваемое транспортное средство V1 изменяет свой курс в точке TP изменения курса, позиция движения рассматриваемого транспортного средства V1 в полосе движения может предварительно отклоняться в направлении, в котором рассматриваемое транспортное средство V1 изменяет свой курс. Таким образом, в окружении, проиллюстрированном на фиг. 3, поскольку рассматриваемое транспортное средство V1 изменяет свой курс вправо на Y-образном перекрестке, целевой маршрут RT планируется таким образом, что рассматриваемое транспортное средство V1 движется при отклонении вправо в полосе движения, в которой движется рассматриваемое транспортное средство V1, и после этого изменяет курс вправо на Y-образном перекрестке.
[0056] В одном или более вариантов осуществления настоящего изобретения, область R4 управления на стороне изменения курса рассматриваемого транспортного средства V1 задается, как проиллюстрировано на фиг. 3, таким образом, что она имеет уменьшенную ширину WT в пределах зоны, заданной посредством предварительно определенного расстояния d2 от точки TP изменения курса до точки впереди рассматриваемого транспортного средства V1. Посредством этого задания, ширина WR области R5 управления, ассоциированная с шириной WT области R4 управления в пределах этой зоны, является относительно большой, и целевой маршрут RT, который задается между областями R3 и R5 управления, больше отклоняется к стороне изменения курса около точки TP изменения курса. Как результат, точка движения рассматриваемого транспортного средства V1, которое отклоняется к стороне изменения курса до того, как рассматриваемое транспортное средство V1 движется в точке TP изменения курса, может плавно восстанавливаться в позицию около центра полосы движения, в которой движется рассматриваемое транспортное средство V1, после того, как рассматриваемое транспортное средство V1 проезжает мимо точки TP изменения курса.
[0057] Вышеописанный пример, проиллюстрированный на фиг. 3, примерно иллюстрирует способ планирования целевого маршрута RT, который обеспечивает возможность рассматриваемому транспортному средству V1 отклоняться к стороне изменения курса. В этом способе, ширина WT области R4 управления уменьшается около точки TP изменения курса. Тем не менее, настоящее изобретение не ограничено таким примером. Таким образом, в одном или более вариантов осуществления настоящего изобретения, когда области R3 и R5 управления расположены на противоположной стороне относительно области R4 управления, которая расположена на стороне изменения курса рассматриваемого транспортного средства V1, может быть достаточным то, что отношение (WR/WT) ширины WR области R3 управления и/или R5 к ширине WT области R4 управления может задаваться большим около точки TP изменения курса, чем отношение в других местоположениях. Например, устройство 10 управления может увеличивать ширину WR области R3 управления и/или R5 около точки TP изменения курса, чтобы за счет этого увеличивать вышеописанное отношение (WR/WT) ширин областей управления.
[0058] В этом задании, с учетом плавного осуществления управления позицией движения, когда рассматриваемое транспортное средство V1 изменяет свой курс, устройство 10 управления задает, в пределах зоны предварительно определенного расстояния d1 от точки TP изменения курса, область, в которой вышеописанное отношение (WR/WT) ширин областей управления увеличивается, в качестве приближающейся к точке TP изменения курса. Например, как проиллюстрировано на фиг. 3, устройство 10 управления задает, в пределах зоны предварительно определенного расстояния d1 от точки TP изменения курса, область, в которой ширина WT области R4 управления уменьшается, в качестве приближающейся к точке TP изменения курса. Аналогично, с учетом плавного осуществления управления позицией движения после того, как рассматриваемое транспортное средство V1 изменяет свой курс, устройство 10 управления задает, в пределах зоны предварительно определенного расстояния d2 от точки TP изменения курса, область, в которой вышеописанное отношение (WR/WT) ширин областей управления уменьшается, в качестве отдаляющейся от точки TP изменения курса. Например, как проиллюстрировано на фиг. 3, устройство 10 управления задает, в пределах зоны предварительно определенного расстояния d2 от точки TP изменения курса, область, в которой ширина WT области R4 управления увеличивается, в качестве отдаляющейся от точки TP изменения курса.
[0059] В одном или более вариантов осуществления настоящего изобретения, предварительно определенное расстояние d1 задается выше предварительно определенного расстояния d2. Посредством этого планирования, целевой маршрут планируется таким образом, что рассматриваемое транспортное средство V1 отклоняется к стороне изменения курса от точки, расположенной больше перед точкой TP изменения курса (на ближней стороне рассматриваемого транспортного средства), поскольку предварительно определенное расстояние d1 задается большим. Кроме того, целевой маршрут RT планируется таким образом, что рассматриваемое транспортное средство V1 может восстанавливаться в позицию около центра полосы движения относительно вскоре после изменения курса, поскольку предварительно определенное расстояние d2 задается меньшим. Это обеспечивает возможность плавного управления позицией движения, когда рассматриваемое транспортное средство V1 изменяет свой курс. Как результат, некомфортное ощущение, возникающее у пассажиров рассматриваемого транспортного средства V1, уменьшается, и пассажиры других транспортных средств, движущихся рядом с рассматриваемым транспортным средством V1, могут предполагать поведение рассматриваемого транспортного средства V1. Таким образом, это задание предпочитается с точки зрения повышения уровня безопасности.
[0060] В одном или более вариантов осуществления настоящего изобретения, ширина WT области R4 управления, которая задается на стороне изменения курса рассматриваемого транспортного средства V1, задается идентичной ширине на крае, который является ближайшим к точке TP изменения курса (завершающем крае) в пределах зоны, заданной посредством предварительно определенного расстояния d1, и на крае, который является ближайшим к точке TP изменения курса (начальном крае) в пределах зоны, заданной посредством предварительно определенного расстояния d2. Таким образом, ширина WT области R4 управления является непрерывной на завершающем краю зоны, заданной посредством предварительно определенного расстояния d1, и на начальном крае зоны, заданной посредством предварительно определенного расстояния d2. Это планирование обеспечивает возможность планирования целевого маршрута RT таким образом, что рассматриваемое транспортное средство V1 может плавно двигаться около точки TP изменения курса.
[0061] Фиг. 3 иллюстрирует пример, в котором завершающий край предварительно определенного расстояния d1 и начальный край предварительно определенного расстояния d2 задаются со ссылкой на вершину разделительных линий, которые присутствуют справа от рассматриваемого транспортного средства V1, но завершающий край предварительно определенного расстояния d1 и начальный край предварительно определенного расстояния d2 также могут задаваться со ссылкой на вершину разделительных линий, которые присутствуют слева от рассматриваемого транспортного средства V1. Когда разделительные линии не имеют вершины и имеют искривленную форму, завершающий край предварительно определенного расстояния d1 и начальный край предварительно определенного расстояния d2 могут задаваться со ссылкой на искривленную часть разделительных линий.
[0062] В одном или более вариантов осуществления настоящего изобретения, чем выше предположительно должна быть скорость движения рассматриваемого транспортного средства V1, т.е. чем выше ограничение скорости дороги, по которой движется рассматриваемое транспортное средство V1, тем большими может задавать устройство 10 управления вышеописанные расстояния d1 и d2. Это задание обеспечивает возможность надлежащего планирования целевого маршрута RT в соответствии со скоростью движения рассматриваемого транспортного средства V1. Помимо этого или альтернативно, устройство 10 управления может задавать длины предварительно определенных расстояний d1 и d2 в соответствии с типом дороги, формой дороги и числом полос движения дороги, по которой движется рассматриваемое транспортное средство V1. Примеры типа дороги включают в себя типы общей дороги и шоссе. Примеры формы дороги включают в себя формы перекрестков (к примеру, Y-образный перекресток, Т-образный перекресток и развязку) и формы въездов и съездов с шоссе, которые описываются ниже.
[0063] В одном или более вариантов осуществления настоящего изобретения, способ выполнения управления движением для рассматриваемого транспортного средства V1 примерно иллюстрируется, как указано выше, но когда операция руления водителем рассматриваемого транспортного средства V1 выполняется в то время, когда выполняется управление движением для рассматриваемого транспортного средства V1, управление движением запрещается. Например, в окружении, проиллюстрированном на фиг. 3, когда пассажир рассматриваемого транспортного средства V1 выполняет операцию руления в то время, когда рассматриваемое транспортное средство V1 отклоняется к стороне изменения курса в точке TP изменения курса, устройство 10 управления запрещает управление движением. В таком случае, в котором управление движением запрещается, управление движением для рассматриваемого транспортного средства V1 может возобновляться в надлежащее время, к примеру, когда пассажир рассматриваемого транспортного средства V1 выполняет операцию инициирования управления движением, когда пассажир рассматриваемого транспортного средства V1 завершает операцию руления, и когда предварительно определенное время проходит, или предварительно определенное проезжаемое расстояние достигнуто после того, как рассматриваемое транспортное средство V1 проезжает мимо точки TP изменения курса.
[0064] Вышеописанные примеры примерно иллюстрируют окружение, в котором целевой маршрут движения рассматриваемого транспортного средства V1 (т.е. направление, в котором рассматриваемое транспортное средство V1 изменяет свой курс) предварительно планируется, но когда целевой маршрут движения рассматриваемого транспортного средства V1 не задается, устройство 10 управления задает области управления около точки TP изменения курса таким образом, что может задаваться целевой маршрут RT, который обеспечивает возможность рассматриваемому транспортному средству V1 двигаться около центра полосы движения даже около точки TP изменения курса. Например, устройство 10 управления задает области управления таким образом, что вышеописанное отношение (WR/WT) ширин областей управления становится значением, которое равно приблизительно единице (1) около точки TP изменения курса.
[0065] В одном или более вариантов осуществления настоящего изобретения, местоположение, в котором задается точка TP изменения курса, может представлять собой местоположение, которое обеспечивает возможность рассматриваемому транспортному средству V1 изменять свой курс. Примеры такого местоположения включают в себя трехсторонние скрещения, к примеру, Y-образный перекресток, как проиллюстрировано на фиг. 3, и Т-образный перекресток; четырехсторонние скрещения, к примеру, развязку и K-образный перекресток; и многосторонние скрещения, к примеру, пятисторонний перекресток. Ниже описываются примеры, в которых настоящее изобретение применяется к перекрестку с развязкой в качестве типичного перекрестка. Тем не менее, следует понимать, что примеры местоположения, в котором задается точка TP изменения курса, дополнительно включают в себя примеры, которые не представляют собой перекрестки, но обеспечивают возможность рассматриваемому транспортному средству V1 изменять свой курс, к примеру, местоположения около въездов и съездов с шоссе.
[0066] В одном или более вариантов осуществления настоящего изобретения, также когда рассматриваемое транспортное средство V1 движется через развязку, как проиллюстрировано на фиг. 4, вышеописанное отношение (WR/WT) ширин областей управления задается большим около развязки в качестве точки TP изменения курса, аналогично вышеописанному. Например, как проиллюстрировано на фиг. 4, область R6 управления задается со ссылкой на разделительные линии, которые присутствуют слева от рассматриваемого транспортного средства V1, и область R7 управления задается со ссылкой на разделительные линии, которые присутствуют справа от рассматриваемого транспортного средства V1. В окружении, в котором рассматриваемое транспортное средство V1 изменяет свой курс влево на развязке, устройство 10 управления задает отношение (WR/WT) ширины WR области R7 управления к ширине WT области R6 управления большим, к примеру, посредством относительного уменьшения ширины WT области R6 управления около развязки. Посредством этого задания, также когда рассматриваемое транспортное средство V1 изменяет свой курс на развязке, может быть запланирован целевой маршрут RT, при котором рассматриваемое транспортное средство V1 управляется таким образом, что оно отклоняется к стороне изменения курса в точке TP изменения курса.
[0067] В одном или более вариантов осуществления настоящего изобретения, также когда рассматриваемое транспортное средство V1 движется в точке TP изменения курса, которая соединяется со съездом с шоссе, как проиллюстрировано на фиг. 5, вышеописанное отношение (WR/WT) ширин областей управления задается большим около точки TP изменения курса, аналогично вышеописанному. Например, как проиллюстрировано на фиг. 5, область R8 управления задается со ссылкой на разделительные линии, которые присутствуют справа от рассматриваемого транспортного средства V1, и область R9 управления задается со ссылкой на разделительные линии, которые присутствуют слева от рассматриваемого транспортного средства V1. В окружении, в котором рассматриваемое транспортное средство V1 изменяет свой курс влево, устройство 10 управления задает отношение (WR/WT) ширины WR области R8 управления к ширине WT области R9 управления большим, к примеру, посредством относительного уменьшения ширины WT области R9 управления около точки TP изменения курса.
[0068] В одном или более вариантов осуществления настоящего изобретения, когда предполагается, что объезжаемый объект присутствует рядом с рассматриваемым транспортным средством V1 в момент, когда рассматриваемое транспортное средство V1 проезжает мимо точки TP изменения курса, область объекта, заданная для объезжаемого объекта, задается небольшой, и ввиду этого лучшее управление движением может выполняться для рассматриваемого транспортного средства V1.
[0069] Фиг. 6 иллюстрирует окружение, в котором когда рассматриваемое транспортное средство V1 изменяет свой курс вправо на Y-образном перекрестке, другое транспортное средство V5 проезжает мимо или обгоняет рассматриваемое транспортное средство V1 слева от рассматриваемого транспортного средства V1. На фиг. 6, V1(t3)-V1(t5) представляют позиции рассматриваемого транспортного средства V1 во времена t3-t5, соответственно. V5(t3)-V5(t5) и RV5(t3)-RV5(t5) представляют позиции другого транспортного средства V5 и области объекта, заданные для другого транспортного средства V5 во времена t3-t5, соответственно.
[0070] В одном или более вариантов осуществления настоящего изобретения, в окружении, проиллюстрированном на фиг. 6, когда предполагается, что другое транспортное средство V5 приближается к рассматриваемому транспортному средству V1 в момент, когда рассматриваемое транспортное средство V1 изменяет свой курс на Y-образном перекрестке (в момент, когда рассматриваемое транспортное средство V1 расположено в позиции V1(t4)), область RV5(t4) объекта для другого транспортного средства V5 в позиции V5(t4) задается меньше областей, когда другое транспортное средство V5 расположено в других позициях (V5(t3) и V5(t5)). В частности, как проиллюстрировано на фиг. 6, часть области RV5(t4) объекта, который идет в направлении от другого транспортного средства V5 к рассматриваемому транспортному средству V1 (в направлении по оси +X), задается меньше других частей. Уменьшение области RV5(t4) объекта, как описано выше, обеспечивает возможность планирования целевого маршрута RT с небольшой величиной объезда для другого транспортного средства V5 во время t4, как проиллюстрировано на фиг. 6, и рассматриваемое транспортное средство V1 с меньшей вероятностью должно чрезмерно отклоняться к стороне изменения курса. Таким образом, после того, как рассматриваемое транспортное средство V1 отклоняется к стороне изменения курса, рассматриваемое транспортное средство V1 с меньшей вероятностью должно дополнительно отклоняться к стороне изменения курса с тем, чтобы объезжать другое транспортное средство V5.
[0071] В одном или более вариантов осуществления настоящего изобретения, при условии, что рассматриваемое транспортное средство V1 изменяет свой курс в точке TP изменения курса, когда рассматриваемое транспортное средство V1 проезжает мимо другого транспортного средства, которое движется по встречной полосе движения, величина управления для отклонения рассматриваемого транспортного средства V1 к стороне изменения курса уменьшается около точки TP изменения курса.
[0072] Фиг. 7 является видом, иллюстрирующим окружение, аналогичное вышеописанному окружению по фиг. 3 за исключением того, что другое транспортное средство V6, движущееся на встречной полосе движения, проезжает мимо рассматриваемого транспортного средства V1 около Y-образного перекрестка. В одном или более вариантов осуществления настоящего изобретения, при условии, что рассматриваемое транспортное средство V1 изменяет свою полосу движения вправо на Y-образном перекрестке, когда рассматриваемое транспортное средство V1 проезжает мимо другого транспортного средства V6, отношение (WR/WT) ширин областей управления около Y-образного перекрестка задается меньше отношения (WR/WT) ширин областей управления в вышеописанном окружении, проиллюстрированном на фиг. 3.
[0073] Например, в окружении, проиллюстрированном на фиг. 7, устройство 10 управления задает ширину WT области R4 управления около Y-образного перекрестка большей ширины WT области R4 управления, проиллюстрированной на фиг. 3, на величину R4a, проиллюстрированную на фиг. 7. Отношение (WR/WT) ширин областей управления ввиду этого задается небольшим. Посредством этого задания, в окружении, в котором рассматриваемое транспортное средство V1 изменяет свой курс в точке TP изменения курса и проезжает мимо другого транспортного средства V6, движущегося по встречной полосе движения, целевой маршрут RT планируется с уменьшенной величиной отклонения рассматриваемого транспортного средства V1 к стороне изменения курса. Как результат, можно не допускать чрезмерного приближения рассматриваемого транспортного средства V1 к другому транспортному средству V6.
[0074] В одном или более вариантов осуществления настоящего изобретения, когда рассматриваемое транспортное средство V1 обгоняет или проезжает мимо объезжаемого объекта до достижения точки TP изменения курса, область объекта для объезжаемого объекта задается небольшой.
[0075] Фиг. 8 является видом, иллюстрирующим окружение, аналогичное вышеописанному окружению по фиг. 4 за исключением того, что другое транспортное средство V7 паркуется не доезжая до развязки, и область RV7 объекта задается для другого транспортного средства V7. В окружении, проиллюстрированном на фиг. 8, например, устройство 10 управления согласно одному или более вариантов осуществления настоящего изобретения задает уменьшенную область RV7 объекта для другого транспортного средства V7. В частности, как проиллюстрировано на фиг. 8, часть области RV7 объекта, которая идет в направлении от другого транспортного средства V7 к рассматриваемому транспортному средству V1 (в направлении по оси +X), задается меньше других частей. Рассматриваемое транспортное средство V1 пытается объезжать объезжаемый объект до изменения курса в точке TP изменения курса, но вышеуказанное задание может не допускать варьирования позиции движения в противоположном направлении относительно стороны изменения курса. Это описывается подробнее. В окружении по фиг. 8, рассматриваемое транспортное средство V1 должно временно отклоняться вправо, чтобы объезжать другое транспортное средство V7, до того, как рассматриваемое транспортное средство V1 управляется таким образом, что оно изменяет курс влево на развязке. В этой операции, область RV7 объекта задается небольшой, как описано выше, чтобы за счет этого обеспечивать возможность планирования целевого маршрута RT с уменьшенной величиной объезда для объезда другого транспортного средства V7 посредством рассматриваемого транспортного средства V1. Как результат, можно не допускать отклонения рассматриваемого транспортного средства V1 к противоположной стороне относительно стороны изменения курса.
[0076] Далее описывается функция управления устройством 10 управления. Функция управления используется для того, чтобы выводить информацию команд для инструктирования рассматриваемому транспортному средству V1 двигаться по целевому маршруту RT в контроллер 70 транспортного средства, устройство 80 приведения в движение и устройство 90 рулевого управления.
[0077] После получения информации команд из устройства 10 управления, контроллер 70 транспортного средства управляет устройством 80 приведения в движение и устройством 90 рулевого управления, чтобы управлять рассматриваемым транспортным средством V1 таким образом, что оно движется по целевому маршруту RT. Контроллер 70 транспортного средства осуществляет управление устройством 90 рулевого управления таким образом, что рассматриваемое транспортное средство движется при поддержании определенной поперечной позиции в полосе движения, с использованием формы дороги, обнаруженной посредством устройства 50 обнаружения, информации 122 дороги из навигационного устройства 120 и модели разделительных линий, сохраненной в картографической информации 123. Контроллер 70 транспортного средства вычисляет величину управления рулением на основе угла поворота при рулении, полученного из датчика 61 угла поворота при рулении, скорости транспортного средства, полученной из датчика 62 скорости транспортного средства, и информации относительно тока для исполнительного устройства рулевого управления, и отправляет команду управления током в исполнительное устройство рулевого управления, чтобы осуществлять управление таким образом, что рассматриваемое транспортное средство движется в целевой поперечной позиции. Способ управления поперечной позицией рассматриваемого транспортного средства V1 не ограничен использованием вышеописанного устройства 90 рулевого управления. Помимо этого или альтернативно, устройство 80 приведения в движение и/или тормозное устройство 81 могут использоваться для того, чтобы управлять направлением движения (т.е. поперечной позицией) рассматриваемого транспортного средства V1 на основе разности частот вращения между правым и левым ведущими колесами. В этом смысле, "поворот" транспортного средства имеет намерение охватывать случаи использования устройства 80 приведения в движение и/или тормозного устройства 81 в дополнение к случаям использования устройства 90 рулевого управления.
[0078] Таким образом, в одном или более вариантов осуществления настоящего изобретения, когда разделительные линии и объезжаемый объект обнаруживаются, целевой маршрут RT планируется на основе позиций разделительных линий и объезжаемого объекта. Затем управление движением выполняется таким образом, что рассматриваемое транспортное средство V1 движется по целевому маршруту RT. Кроме того, в одном или более вариантов осуществления настоящего изобретения, обнаружение объезжаемого объекта, вычисление целевого маршрута RT и управление движением на основе целевого маршрута RT многократно выполняются с регулярными интервалами. Это обеспечивает возможность устройству 10 управления последовательно планировать целевой маршрут RT для рассматриваемого транспортного средства V1 на основе обновленных окружающих ситуаций рядом с рассматриваемым транспортным средством V1. Следовательно, рассматриваемое транспортное средство V1 может двигаться по целевому маршруту, подходящему для окружающих ситуаций рядом с рассматриваемым транспортным средством V1.
[0079] В завершение описывается функция представления устройства 10 управления согласно одному или более вариантов осуществления настоящего изобретения. Устройство 10 управления отправляет информацию в соответствии с позициями разделительных линий, информацию в соответствии с позицией объезжаемого объекта и информацию относительно управления движением для рассматриваемого транспортного средства V1 посредством устройства 100 управления движением в устройство 110 вывода, которое затем выводит их во внешнюю среду в вышеописанной форме.
[0080] Далее описывается процесс управления движением согласно одному или более вариантов осуществления настоящего изобретения со ссылкой на блок-схемы последовательности операций способа фиг. 9 и 10. Контент процесса на каждом этапе является таким, как описано выше, и ниже главным образом описывается последовательность операций процесса.
[0081] На этапе S101, устройство 10 управления получает информацию рассматриваемого транспортного средства, которая включает в себя, по меньшей мере, позицию рассматриваемого транспортного средства V1. Информация рассматриваемого транспортного средства дополнительно может включать в себя скорость транспортного средства и/или ускорение рассматриваемого транспортного средства V1. На этапе S102, устройство 10 управления получает, из устройства 50 обнаружения, информацию разделительных линий, которая включает в себя позиции разделительных линий, присутствующих рядом с рассматриваемым транспортным средством V1, информацию объектов, которая включает в себя позицию объезжаемого объекта, который должно объезжать рассматриваемое транспортное средство V1. Следует понимать, что информация объектов дополнительно может включать в себя скорость и/или ускорение объезжаемого объекта.
[0082] На этапе S103, устройство 10 управления получает результат обнаружения разделительных линий и объезжаемого объекта из устройства 50 обнаружения. Результат обнаружения разделительных линий и объезжаемого объекта включает в себя информацию относительно позиций разделительных линий и объезжаемого объекта. На этапе S104, устройство 10 управления задает области управления в соответствии с позициями разделительных линий и также задает область объекта в соответствии с позицией объезжаемого объекта.
[0083] На этапе S105, устройство 10 управления вычисляет целевые координаты и целевой маршрут RT1 для объезда области объекта. Целевые координаты и целевой маршрут RT проходят между парой разделительных линий, которые задают полосу движения, в которой движется рассматриваемое транспортное средство V1. Целевой маршрут RT включает в себя одну или более целевых координат, в которых должно двигаться рассматриваемое транспортное средство V1. Каждая целевая координата включает в себя целевую поперечную позицию (значение целевой координаты X) и целевую продольную позицию (значение целевой координаты Y). Устройство 10 управления получает целевой маршрут RT посредством соединения вычисленной одной или более целевых координат и текущей позиции рассматриваемого транспортного средства V1. Ниже описывается способ вычисления целевых координат на этапе S105.
[0084] На этапе S106, устройство 10 управления получает целевую поперечную позицию или позиции целевой координаты или координат, вычисленные на этапе S105. На этапе S107, устройство 10 управления сравнивает текущую поперечную позицию рассматриваемого транспортного средства V1 с целевой поперечной позицией или позицией, полученной на этапе S106, и вычисляет усиление обратной связи для поперечной позиции на основе результата сравнения.
[0085] На этапе S108, устройство 10 управления вычисляет целевое значение управления на основе фактической поперечной позиции рассматриваемого транспортного средства V1, целевой поперечной позиции, соответствующей текущей позиции, и усиления обратной связи этапа S107. Целевое значение управления связано с углом поворота при рулении, угловой скоростью руления и другими необходимыми параметрами для передвижения рассматриваемого транспортного средства V1 в целевой поперечной позиции. После этого, на этапе S112, устройство 10 управления выводит вычисленное целевое значение управления в бортовое устройство 200. Это обеспечивает возможность рассматриваемому транспортному средству V1 двигаться по целевому маршруту RT, который задается посредством целевой поперечной позиции. Когда множество целевых координат вычисляется на этапе S105, процесс этапов S106-S112 повторяется каждый раз, когда получается целевая поперечная позиция, и целевое значение управления для каждой полученной целевой поперечной позиции выводится в бортовое устройство 200.
[0086] На этапе S109, устройство 10 управления получает целевую продольную позицию или позиции одной или более целевых координат, вычисленные на этапе S105. На этапе S110, устройство 10 управления сравнивает текущую продольную позицию и скорость и ускорение транспортного средства в текущей позиции рассматриваемого транспортного средства V1 с целевой продольной позицией, соответствующей текущей продольной позиции, и скоростью и ускорением транспортного средства в целевой продольной позиции и вычисляет усиление обратной связи для продольной позиции на основе результата сравнения. На этапе S111, устройство 10 управления вычисляет целевое значение управления для продольной позиции на основе скорости и ускорения транспортного средства, соответствующие целевой продольной позиции, и усиления обратной связи для продольной позиции, вычисленного на этапе S110. Как указано на вышеописанных этапах S106-S108 и S112, процесс этапов S109-S112 повторяется каждый раз, когда получается целевая продольная позиция, и целевое значение управления для каждой полученной целевой продольной позиции выводится в бортовое устройство 200.
[0087] Здесь, целевое значение управления для продольной позиции (в продольном направлении) означает значение управления для каждой из операции приводного механизма (которая включает в себя операцию двигателя внутреннего сгорания в случае автомобиля с двигателем и операцию электромотора в случае электромобиля и дополнительно включает в себя распределение крутящего момента для двигателя внутреннего сгорания и электромотора в случае гибридного автомобиля) и операции торможения, чтобы достигать ускорения, замедления и скорости транспортного средства, соответствующих целевой продольной позиции. Например, в автомобиле с двигателем, функция управления используется для того, чтобы вычислять целевой объем всасываемого воздуха (целевую степень открытия дроссельного клапана) и целевой объем впрыска топлива на основе вычисленных значений текущего и целевого ускорения, замедления и скорости транспортного средства и отправлять их в устройство 80 приведения в движение. Альтернативно, может использоваться функция управления для того, чтобы вычислять ускорение, замедление и скорость транспортного средства и отправлять их в контроллер 70 транспортного средства, который может вычислять значение управления для каждой из операции приводного механизма (которая включает в себя операцию двигателя внутреннего сгорания в случае автомобиля с двигателем и операцию электромотора в случае электромобиля и дополнительно включает в себя распределение крутящего момента для двигателя внутреннего сгорания и электромотора в случае гибридного автомобиля), и операции торможения, чтобы достигать этого ускорения, замедления и скорости транспортного средства.
[0088] Процедура затем переходит к этапу S112, на котором устройство 10 управления выводит целевое значение управления для продольной позиции (в продольном направлении), вычисленное на этапе S111, в бортовое устройство 200. Контроллер 70 транспортного средства выполняет управление рулением и управление приведением в движение таким образом, чтобы управлять рассматриваемым транспортным средством с возможностью двигаться по целевому маршруту RT, который задается посредством целевой поперечной позиции и целевой продольной позиции.
[0089] На этапе S113, устройство 10 управления управляет устройством 110 вывода таким образом, чтобы представлять информацию. Информация, представленная посредством устройства 110 вывода, может быть информацией относительно области объекта, вычисленной на этапе S104, формы целевого маршрута, вычисленной на этапах S105, или целевого значения управления, выводимого в бортовое устройство 200 на этапе S112.
[0090] На этапе S114, устройство 10 управления определяет то, вмешивается или нет водитель в работу, к примеру, то, выполняет или нет водитель операцию руления. Когда операция водителем не обнаруживается, процедура возвращается к этапу S101, с которого задание новой области объекта, вычисление целевого маршрута и управление движением повторяются. С другой стороны, когда операция водителем обнаруживается, процедура переходит к этапу S115, на котором управление движением запрещается. После этапа S115 выполняется этап S116, на котором осуществляется представление информации в отношении того, что управление движением запрещается.
[0091] Ссылаясь теперь на блок-схему последовательности операций способа по фиг. 10, проиллюстрирован процесс вычисления целевой координаты этапа S105. Этот процесс описывается ниже.
[0092] Во-первых, на этапе S201, устройство 10 управления определяет то, присутствует или нет точка TP изменения курса впереди рассматриваемого транспортного средства V1. Например, устройство 10 управления обращается к информации 122 дороги и картографической информации 123, которой располагает навигационное устройство 120 бортового устройства 200, чтобы определять то, что точка TP изменения курса присутствует, при получении информации в касательно того, что местоположение, к примеру, перекресток, в котором рассматриваемое транспортное средство V1 может изменять свой курс, присутствует в пределах предварительно определенного расстояния (например, приблизительно 30-200 метров) впереди рассматриваемого транспортного средства V1. Когда, на этапе S201, выполняется определение в отношении того, что точка TP изменения курса присутствует впереди рассматриваемого транспортного средства V1, процедура переходит к этапу S202. Когда, на этапе S201, выполняется определение в отношении того, что точка TP изменения курса не присутствует впереди рассматриваемого транспортного средства V1, процедура переходит к этапу S207.
[0093] На этапе S202, устройство 10 управления определяет то, задается или нет целевой маршрут движения рассматриваемого транспортного средства V1. Например, когда направление изменения курса рассматриваемого транспортного средства V1 около точки TP изменения курса, которая определяется как присутствующая на вышеописанном этапе S201, предварительно известно, к примеру, когда целевой маршрут из текущей позиции рассматриваемого транспортного средства V1 в пункт назначения вычислен посредством навигационного устройства 120 бортового устройства 200, и когда целевой маршрут RT запланирован посредством устройства 10 управления, устройство 10 управления определяет то, что целевой маршрут движения рассматриваемого транспортного средства V1 задается. Когда, на этапе S202, выполняется определение в отношении того, что целевой маршрут движения рассматриваемого транспортного средства V1 задается, процедура переходит к этапу S203. Когда, на этапе S202, выполняется определение в отношении того, что целевой маршрут движения рассматриваемого транспортного средства V1 не задается, процедура переходит к этапу S207.
[0094] На этапе S203, устройство 10 управления извлекает разделительные линии около точки TP изменения курса, которая определяется как присутствующая на вышеописанном этапе S201. Например, устройство 10 управления извлекает разделительные линии, которые присутствуют в определенной зоне около точки TP изменения курса, к примеру, представленной посредством кружка на каждом из фиг. 3-5.
[0095] На этапе S204, устройство 10 управления указывает, для разделительных линий, извлеченных на этапе S203, зоны, которые задаются посредством предварительно определенных расстояний d1 и d2, которые представляют собой расстояния от точки TP изменения курса. Таким образом, как описано выше со ссылкой на фиг. 3-5, устройство 10 управления задает предварительно определенное расстояние d1 от точки TP изменения курса до рассматриваемого транспортного средства V1 и задает предварительно определенное расстояние d2 от точки TP изменения курса до точки впереди рассматриваемого транспортного средства V1, за счет этого указывая зоны, заданные посредством предварительно определенных расстояний d1 и d2.
[0096] На этапе S205, устройство 10 управления указывает разделительные линии, которые присутствуют в пределах зоны, заданной посредством предварительно определенного расстояния d1, указываемого на этапе S204, и задает область управления, ассоциированную с указанными разделительными линиями, относительно небольшой, к примеру, как проиллюстрировано на фиг. 3-5.
[0097] На этапе S206, устройство 10 управления указывает разделительные линии, которые присутствуют в пределах зоны, заданной посредством предварительно определенного расстояния d2, указываемого на этапе S204, и задает область управления, ассоциированную с указанными разделительными линиями, относительно небольшой, к примеру, как проиллюстрировано на фиг. 3-5.
[0098] На этапе S207, устройство 10 управления вычисляет целевые координаты и целевой маршрут RT1 для объезда области объекта, на основе областей управления и области объекта, заданных на этапе S104 по фиг. 9, и вышеописанных областей управления, заданных на этапах S205 и S206. С другой стороны, целевые координаты и целевой маршрут RT проходят между парой разделительных линий, которые задают полосу движения, в которой движется рассматриваемое транспортное средство V1.
[0099] Этап S207 также соответствует случаю, в котором выполнено определение в отношении того, что точка TP изменения курса не присутствует впереди рассматриваемого транспортного средства V1 ("Нет" на этапе S201), и случаю, в котором выполнено определение в отношении того, что целевой маршрут движения рассматриваемого транспортного средства V1 не задается ("Нет" на этапе S202), причем в этих случаях устройство 10 управления вычисляет целевые координаты и целевой маршрут RT только на основе областей управления и области объекта, которые задаются на этапе S104 по фиг. 9.
[0100] После этапа S207 выполняется этап S208, на котором устройство 10 управления выполняет процесс этапа S106 и следующих этапов.
[0101] Устройство 100 управления движением согласно одному или более вариантов осуществления настоящего изобретения сконфигурировано и работает так, как указано выше, и ввиду этого имеет следующие преимущества.
[0102] (1) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, обнаруживается разделительная линия, которая пересекает линию направления ширины, включающую в себя точку изменения курса, и идет на предварительно определенное расстояние. Рассматриваемое транспортное средство V1 начинает изменение курса в точке изменения курса, которая расположена впереди рассматриваемого транспортного средства V1 в его направлении движения. Области управления задаются со ссылкой на обнаруженную разделительную линию. Области управления содержат одну на стороне изменения курса рассматриваемого транспортного средства V1 и другую. Отношение (WR/WT) ширины WR другой к ширине WT одной задается относительно большим. Следовательно, целевой маршрут RT, запланированный на основе областей управления, должен больше отклоняться к стороне изменения курса около точки TP изменения курса. Как результат, когда рассматриваемое транспортное средство V1 изменяет свой курс в точке TP изменения курса, позиция движения рассматриваемого транспортного средства V1 в полосе движения отклоняется к стороне изменения курса. Эта операция совпадает с ожиданием пассажиров относительно следования движению при изменении курса и может уменьшать некомфортное ощущение, возникающее у пассажиров рассматриваемого транспортного средства V1.
[0103] (2) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, отношение (WR/WT) ширин областей управления задается относительно большим при условии, что эти области управления задаются со ссылкой на разделительную линию, которая присутствует в пределах зоны, заданной посредством предварительно определенного расстояния d1 от точки TP изменения курса, в которой рассматриваемое транспортное средство V1 начинает изменение курса, до рассматриваемого транспортного средства V1. Посредством этого задания, целевой маршрут RT планируется таким образом, что он отклоняется к стороне изменения курса до того, как рассматриваемое транспортное средство V1 изменяет свой курс в точке TP изменения курса, и позиция движения рассматриваемого транспортного средства V1 за счет этого может надлежащим образом отклоняться к стороне изменения курса перед изменением курса.
[0104] (3) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, отношение (WR/WT) ширин областей управления задается относительно большим при условии, что эти области управления задаются со ссылкой на разделительную линию, которая присутствует в пределах зоны, заданной посредством предварительно определенного расстояния d2 от точки TP изменения курса, в которой рассматриваемое транспортное средство V1 начинает изменение курса, до точки впереди рассматриваемого транспортного средства V1. Посредством этого задания, целевой маршрут RT планируется таким образом, что он отклоняется к стороне изменения курса после того, как рассматриваемое транспортное средство V1 изменяет свой курс в точке TP изменения курса, и позиция движения рассматриваемого транспортного средства V1 ввиду этого может плавно восстанавливаться в позицию около центра полосы движения после изменения курса.
[0105] (4) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, ширина WT области управления, которая задается на стороне изменения курса рассматриваемого транспортного средства V1, задается идентичной ширине на завершающем крае зоны, заданной посредством предварительно определенного расстояния d1, и на начальном крае области, заданной посредством предварительно определенного расстояния d2. Это задание обеспечивает возможность планирования целевого маршрута RT таким образом, что рассматриваемое транспортное средство V1 может плавно двигаться около точки TP изменения курса. Управление движением для рассматриваемого транспортного средства V1 ввиду этого может выполняться более надлежащим образом.
[0106] (5) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, в зоне предварительно определенного расстояния d1 от точки TP изменения курса, задается область, в которой отношение (WR/WT) ширин областей управления увеличивается, в качестве приближающейся к точке TP изменения курса, и в зоне предварительно определенного расстояния d2 от точки TP изменения курса, задается область, в которой отношение (WR/WT) ширин областей управления уменьшается, в качестве отдаляющейся от точки TP изменения курса. Посредством этого задания, целевой маршрут RT планируется таким образом, чтобы достигать плавного управления, при котором рассматриваемое транспортное средство V1 управляется таким образом, что оно отклоняется к стороне изменения курса при приближении к точке TP изменения курса, и позиция движения восстанавливается в позицию около центра полосы движения при отдалении от точки TP изменения курса. Управление движением для рассматриваемого транспортного средства V1 ввиду этого может выполняться более надлежащим образом.
[0107] (6) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, когда дорога, по которой движется рассматриваемое транспортное средство V1, является прямой дорогой (дорогой без ответвления), рассматриваемое транспортное средство V1 управляется таким образом, что оно движется около центра полосы движения. Посредством этой операции, рассматриваемое транспортное средство V1 с меньшей вероятностью без необходимости отклоняется вправо или влево при движении. Это может предотвращать ситуацию, в которой пассажиры других транспортных средств, движущихся рядом с рассматриваемым транспортным средством V1, неправильно понимают то, что рассматриваемое транспортное средство V1 пытается изменять свой курс.
[0108] (7) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, когда целевой маршрут движения не планируется для рассматриваемого транспортного средства V1, рассматриваемое транспортное средство V1 управляется таким образом, что оно движется около центра полосы движения. Посредством этой операции, рассматриваемое транспортное средство V1 с меньшей вероятностью без необходимости отклоняется вправо или влево при движении. Это может предотвращать ситуацию, в которой пассажиры других транспортных средств, движущихся рядом с рассматриваемым транспортным средством V1, неправильно понимают то, что рассматриваемое транспортное средство V1 пытается изменять свой курс.
[0109] (8) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, когда пассажир рассматриваемого транспортного средства V1 выполняет операцию руления, запрещается управление движением. Ввиду этого управление может выполняться таким образом, чтобы приоритезировать намерение пассажира рассматриваемого транспортного средства V1.
[0110] (9) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, чем выше ограничение скорости дороги, по которой движется рассматриваемое транспортное средство V1, тем большими задаются предварительно определенные расстояния d1 и d2. Следовательно, соответствующий целевой маршрут RT планируется в соответствии со скоростью движения рассматриваемого транспортного средства V1, и управление движением для рассматриваемого транспортного средства V1 может выполняться более надлежащим образом.
[0111] (10) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, когда обнаруживается объезжаемый объект, который должно объезжать рассматриваемое транспортное средство V1, позиция движения рассматриваемого транспортного средства V1 управляется таким образом, чтобы объезжать объезжаемый объект. Следовательно, рассматриваемое транспортное средство V1 должно объезжать объезжаемый объект сложным способом, и управление движением для рассматриваемого транспортного средства V1 может выполняться более надлежащим образом.
[0112] (11) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, когда обнаруживается другое транспортное средство, которое предположительно должно обгонять или проезжать мимо рассматриваемого транспортного средства V1 во время изменения курса рассматриваемого транспортного средства V1, позиция движения рассматриваемого транспортного средства V1 управляется таким образом, что величина объезда для объезда другого транспортного средства (величина объезда для рассматриваемого транспортного средства V1 в направлении ширины полосы движения) является относительно небольшой. Посредством этой операции, величина объезда для объезда другого транспортного средства посредством рассматриваемого транспортного средства V1 уменьшается. Следовательно, после того, как рассматриваемое транспортное средство V1 отклоняется к стороне изменения курса, рассматриваемое транспортное средство V1 с меньшей вероятностью должно дополнительно отклоняться к стороне изменения курса с тем, чтобы объезжать другое транспортное средство. Ввиду этого можно не допускать чрезмерного приближения рассматриваемого транспортного средства V1 к разделительным линиям.
[0113] (12) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, когда обнаруживается встречное транспортное средство, которое должно проезжать мимо рассматриваемого транспортного средства V1 в противоположном направлении во время изменения курса рассматриваемого транспортного средства V1, отношение (WR/WT) ширин областей управления, заданных со ссылкой на разделительную линию около точки TP изменения курса, задается меньше отношения, когда не обнаруживается такое встречное транспортное средство. Посредством этого задания, целевой маршрут RT планируется с уменьшенной величиной отклонения рассматриваемого транспортного средства V1 к стороне изменения курса. Как результат, можно не допускать чрезмерного приближения рассматриваемого транспортного средства V1 к встречному транспортному средству.
[0114] (13) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, когда рассматриваемое транспортное средство V1 управляется таким образом, что оно обгоняет или проезжает мимо объезжаемого объекта во время изменения курса рассматриваемого транспортного средства V1, позиция движения рассматриваемого транспортного средства V1 управляется таким образом, что величина объезда для объезда объезжаемого объекта (величина объезда для рассматриваемого транспортного средства V1 в направлении ширины полосы движения) является относительно небольшой. Рассматриваемое транспортное средство V1 пытается объезжать объезжаемый объект при изменении курса в точке TP изменения курса, но целевой маршрут RT планируется таким образом, что позиция движения с меньшей вероятностью должна варьироваться в противоположном направлении относительно стороны изменения курса. Ввиду этого можно не допускать отклонения рассматриваемого транспортного средства V1 к противоположной стороне к стороне изменения курса.
[0115] (14) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, время инструктирования рассматриваемому транспортному средству V1 объезжать объезжаемый объект задается в соответствии с классификацией объезжаемого объекта. Следовательно, целевой маршрут RT планируется в соответствии с классификацией объезжаемого объекта, и управление движением для рассматриваемого транспортного средства V1 может выполняться более надлежащим образом.
[0116] (15) Согласно устройству 100 управления движением в одном или более вариантов осуществления настоящего изобретения, один или более информационных элементов из информации в соответствии с позициями разделительных линий и информации относительно управления движением для рассматриваемого транспортного средства V1 посредством устройства 100 управления движением выводятся во внешнюю среду, и пассажиры рассматриваемого транспортного средства и/или других транспортных средств ввиду этого могут предварительно информироваться касательно поведения рассматриваемого транспортного средства. Это обеспечивает возможность пассажирам рассматриваемого транспортного средства и/или других транспортных средств реагировать на поведение рассматриваемого транспортного средства.
[0117] (16) Когда способ управления движением согласно одному или более вариантов осуществления настоящего изобретения осуществляется посредством устройства 10 управления, могут получаться работа и преимущество, идентичные работе и преимуществу в вышеуказанном устройстве 100 управления движением.
[0118] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0119] Например, в настоящем описании, приводятся один или более вариантов осуществления устройства управления движением согласно настоящему изобретению посредством примерной иллюстрации устройства 100 управления движением, которое, вместе с бортовым устройством 200, составляет систему 1 управления движением, но настоящее изобретение не ограничено этим.
[0120] В настоящем описании, устройство 100 управления движением, содержащее устройство 10 управления, которое выполняет функцию получения информации рассматриваемого транспортного средства, функцию получения информации объектов, функцию получения информации разделительных линий, функцию задания областей управления, функцию задания областей объекта, функцию планирования маршрута и функцию управления, описывается в качестве одного примера устройства управления движением, содержащего первый модуль получения информации, второй модуль получения информации, модуль задания и модуль управления, но настоящее изобретение не ограничено этим. В настоящем описании, устройство 100 управления движением, дополнительно содержащее устройства 30 и 110 вывода, описывается в качестве одного примера устройства управления движением, дополнительно содержащего модуль вывода, но настоящее изобретение не ограничено этим.
Описание позиционных обозначений
[0121] 1 - система управления движением
100 - устройство управления движением
10 - устройство управления
20 - устройство связи
30 - устройство вывода
31 - дисплей
32 - динамик
200 - бортовое устройство
40 - устройство связи
50 - устройство обнаружения
60 - датчик
70 - контроллер транспортного средства
80 - устройство приведения в движение
90 - устройство рулевого управления
110 - устройство вывода
120 - навигационное устройство
R1-R9 - область управления
RV2, RV4, RV5, RV6, RV7 - область обнаружения
TP - точка изменения курса
V1 - рассматриваемое транспортное средство
V2, V4, V5, V7 - другое транспортное средство (объезжаемый объект)
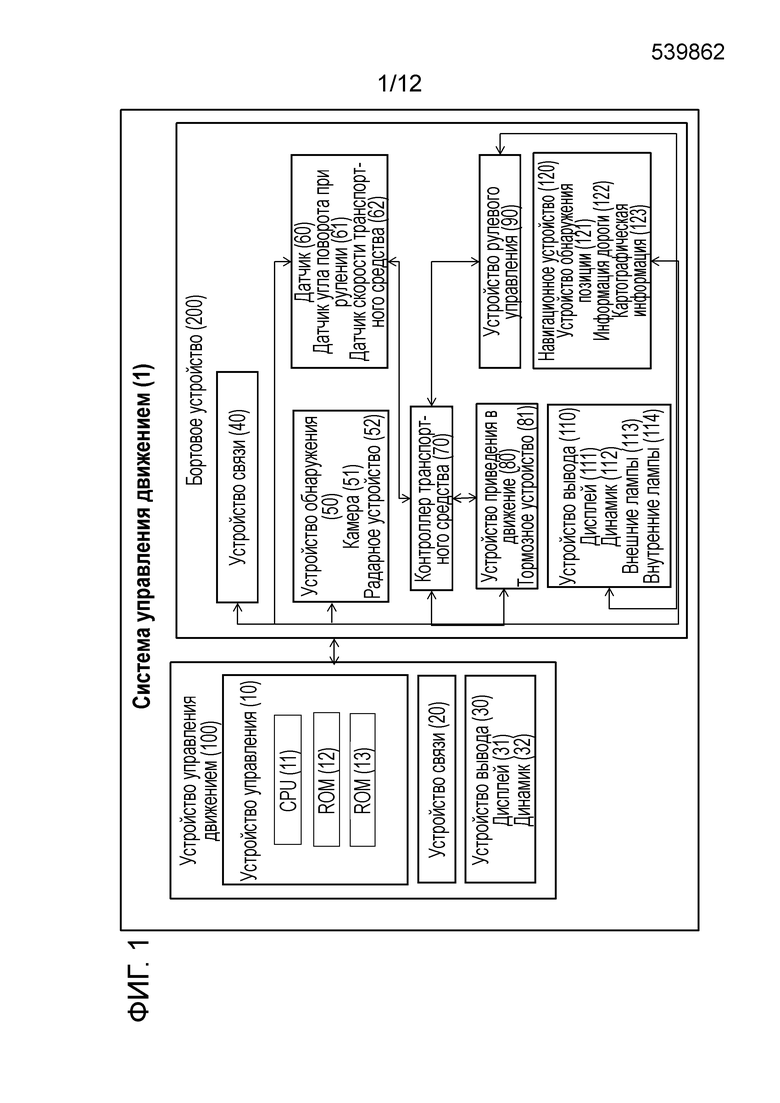

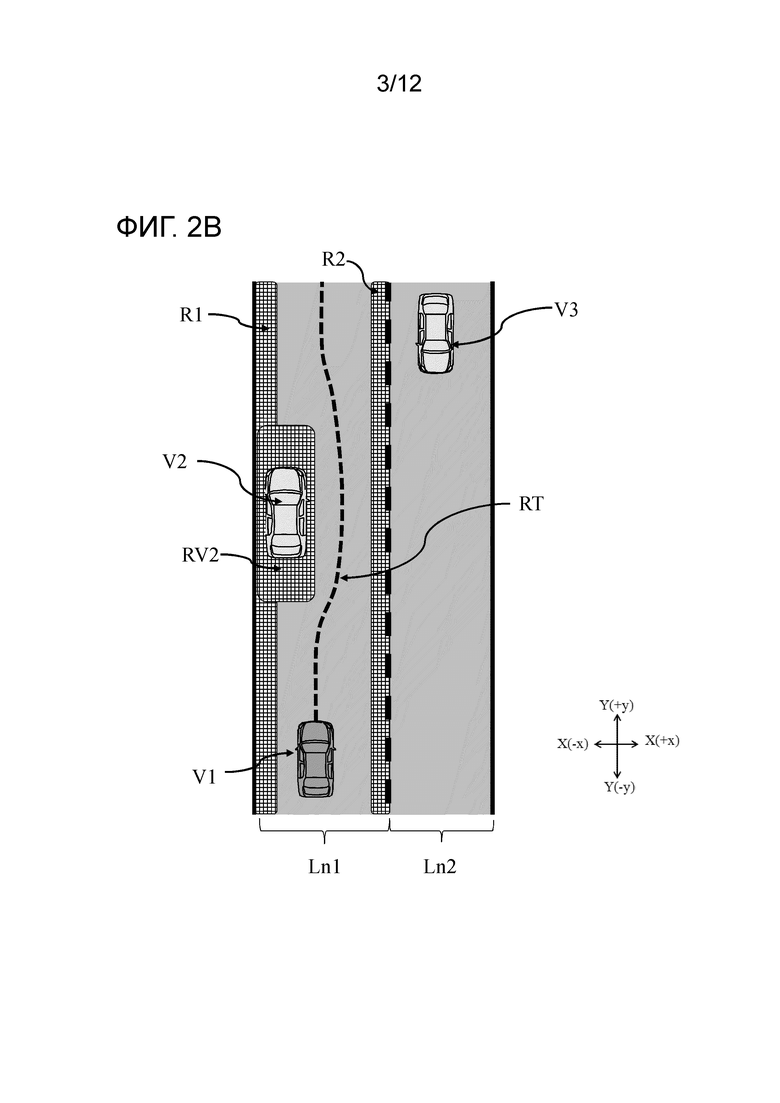
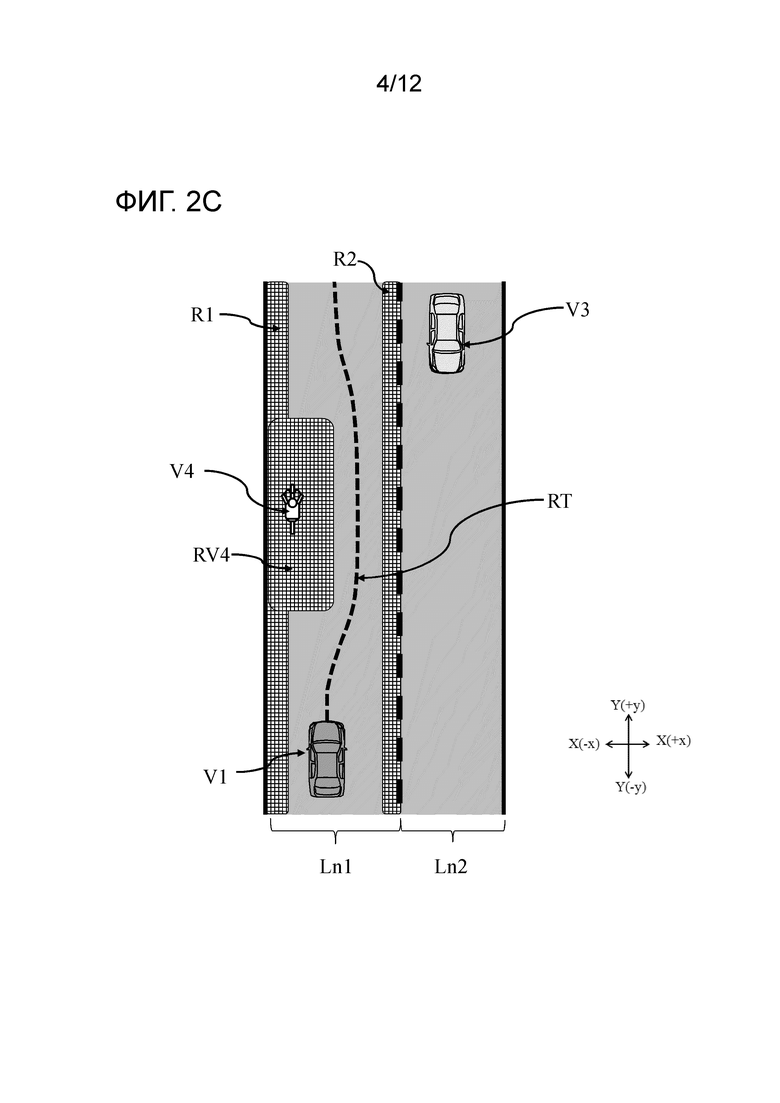

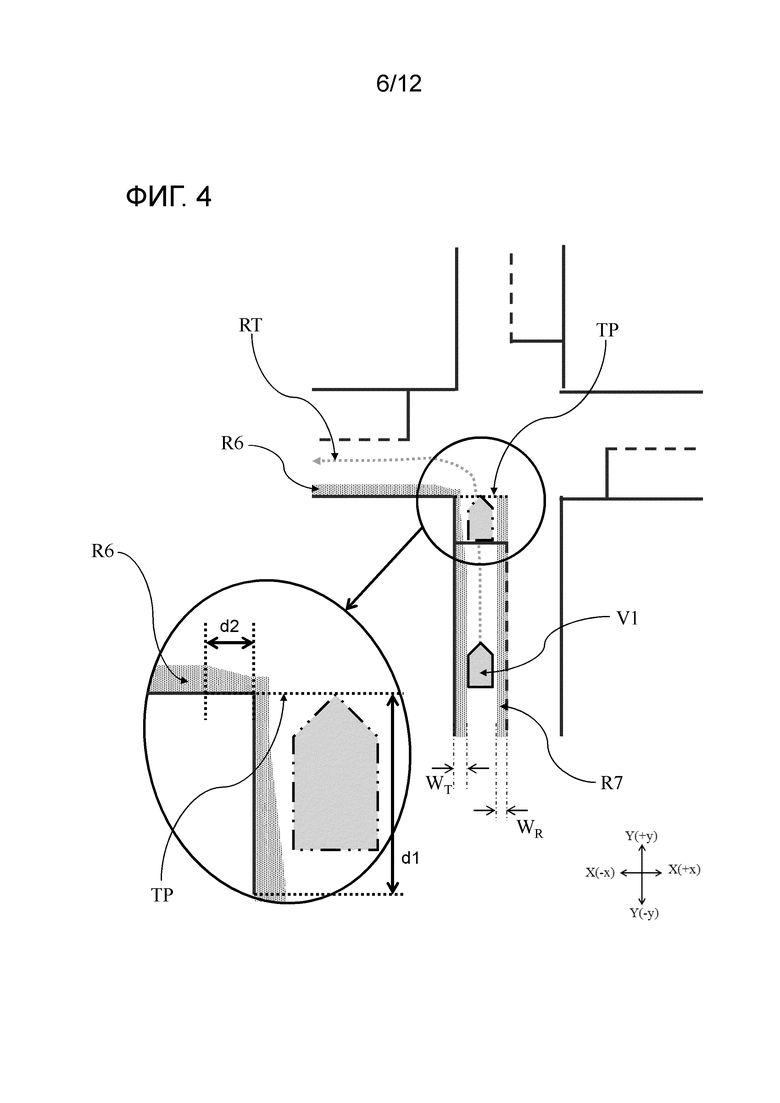


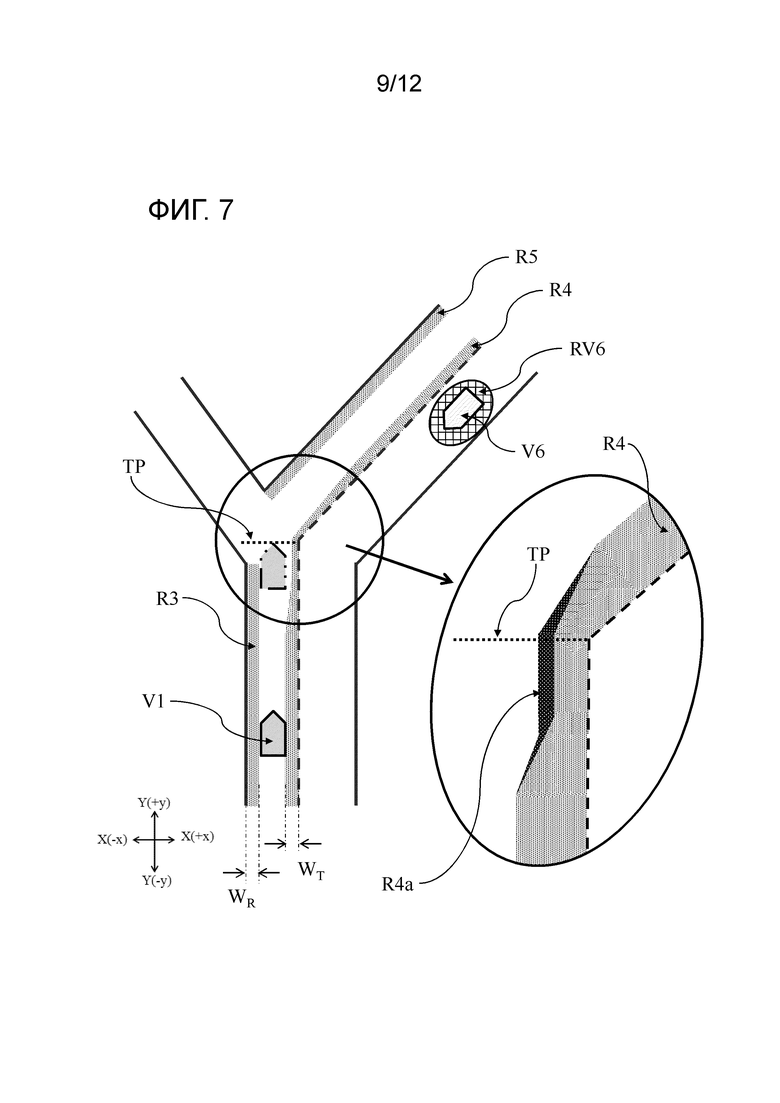

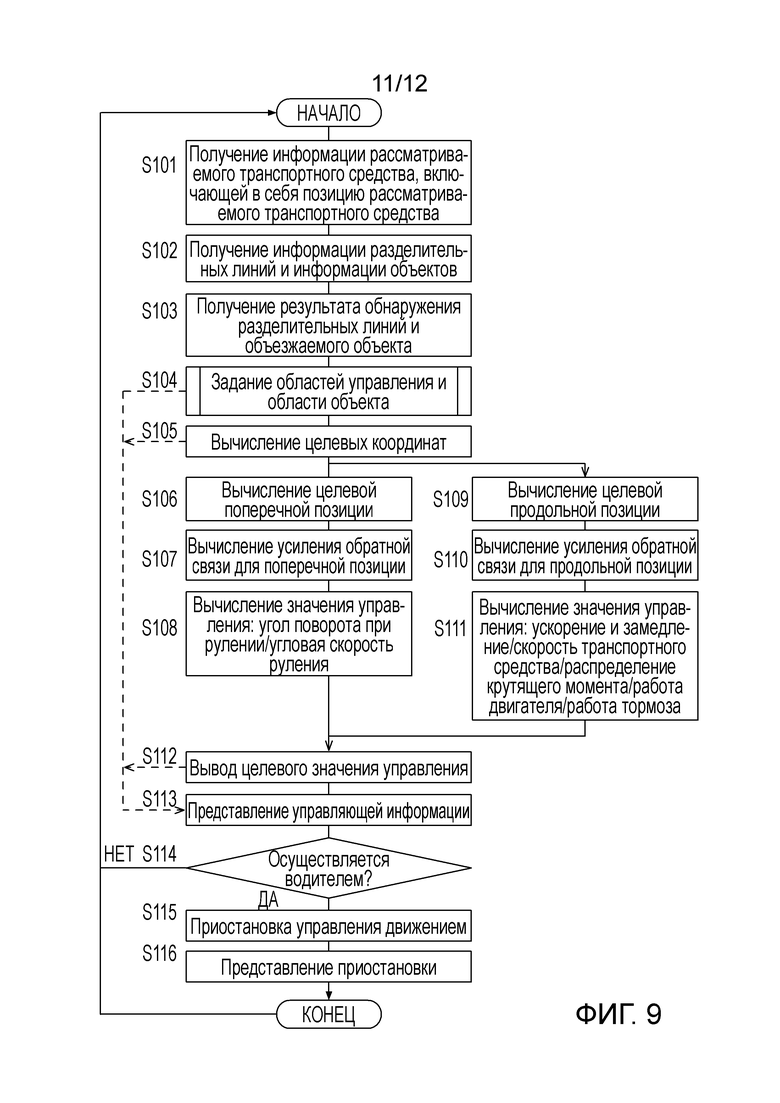

Изобретение относится к устройству управления движением и к способу управления движением, которые управляют движением транспортного средства. Предусмотрено устройство управления движением, которое выполняет первую функцию получения информации для получения информации рассматриваемого транспортного средства о позиции рассматриваемого транспортного средства, вторую функцию получения информации для получения информации разделительных линий о позиции разделительных линий, и функцию задания для задавания области управления со ссылкой на разделительные линии. Области управления имеют предварительно определенную ширину и функцию управления, чтобы управлять позицией движения рассматриваемого транспортного средства (V1) таким образом, что рассматриваемое транспортное средство (V1) движется между парой областей управления, заданных справа и слева относительно рассматриваемого транспортного средства (V1). Разделительные линии включают в себя разделительную линию в точке изменения, которая идет на предварительно определенное расстояние и включает в себя точку изменения курса, в которой начинает изменение курса рассматриваемое транспортное средство (V1). Точка изменения курса расположена впереди рассматриваемого транспортного средства (V1) в направлении движения. Когда пара областей управления, заданных со ссылкой на разделительную линию в точке изменения, содержит одну из пары на стороне изменения курса рассматриваемого транспортного средства (V1) и другую из пары, отношение (WR/WT) ширины WR другой к ширине WT одной задается выше отношения (WR/WT) ширин областей управления, заданных со ссылкой на разделительную линию, отличную от разделительной линии в точке изменения. Разделительная линия, отличная от разделительной линии в точке изменения, присутствует в пределах зоны от точки (TP) изменения курса до точки перед рассматриваемым транспортным средством (V1). Техническим результатом является уменьшение некомфортного ощущения, возникающего у пассажиров. 2 н. и 14 з.п. ф-лы, 12 ил.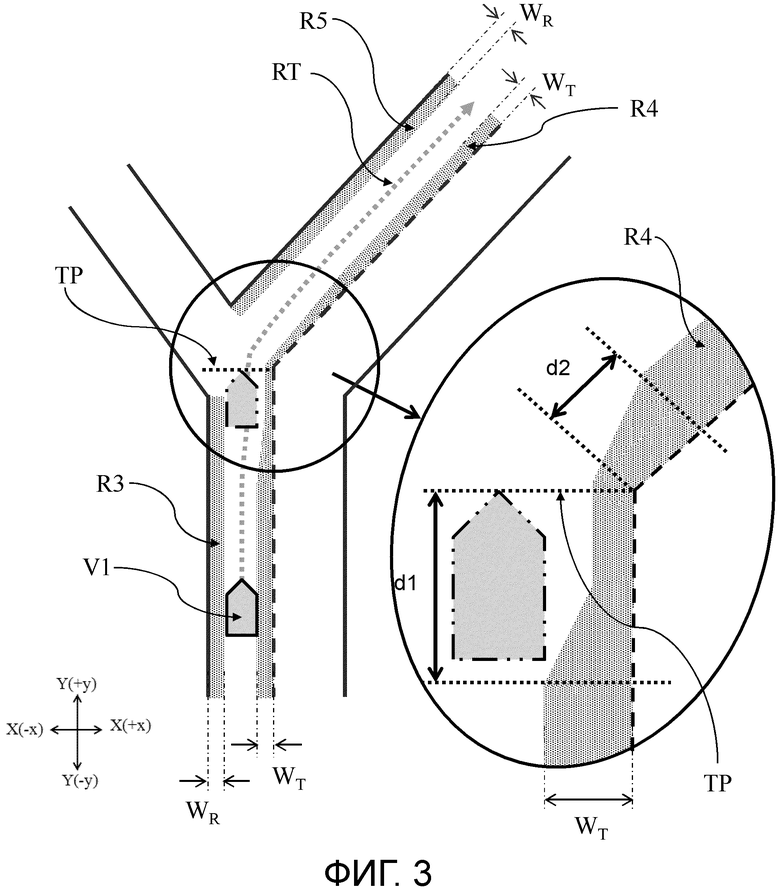
1. Устройство управления движением, содержащее:
первый модуль получения информации, выполненный с возможностью получать информацию рассматриваемого транспортного средства, включающую в себя позицию рассматриваемого транспортного средства;
второй модуль получения информации, выполненный с возможностью получать информацию разделительных линий, включающую в себя позиции разделительных линий, присутствующих рядом с рассматриваемым транспортным средством;
модуль задания, выполненный с возможностью задавать пару областей управления справа и слева относительно рассматриваемого транспортного средства со ссылкой на разделительные линии, причем области управления имеют предварительно определенную ширину; и
модуль управления, выполненный с возможностью управлять позицией движения рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство движется между парой областей управления, причем позиция движения рассматриваемого транспортного средства находится в направлении ширины полосы движения, в которой движется рассматриваемое транспортное средство,
причем модуль задания дополнительно выполнен с возможностью:
обнаруживать разделительную линию в точке изменения на основе информации разделительных линий, причем разделительная линия в точке изменения представляет собой разделительную линию, пересекающую линию направления ширины, включающую в себя точку изменения курса, в которой рассматриваемое транспортное средство начинает изменение курса, и идущую на предварительно определенное расстояние, причем точка изменения курса расположена впереди рассматриваемого транспортного средства в направлении движения; и
задавать, когда пара областей управления, заданных со ссылкой на разделительную линию в точке изменения, содержит одну из пары на стороне изменения курса рассматриваемого транспортного средства и другую из пары, отношение (WR/WT) ширины WR другой к ширине WT одной таким образом, что оно превышает отношение (WR/WT) ширин областей управления, заданных со ссылкой на разделительную линию, отличную от разделительной линии в точке изменения, причем разделительная линия, отличная от разделительной линии в точке изменения, присутствует в пределах зоны от точки изменения курса до точки перед рассматриваемым транспортным средством.
2. Устройство управления движением по п. 1,
в котором разделительная линия в точке изменения включает в себя первую разделительную линию в точке изменения, присутствующую в пределах предварительно определенного первого расстояния, заданного от точки изменения курса до рассматриваемого транспортного средства, и модуль задания задает отношение (WR/WT) ширин областей управления, заданных со ссылкой на первую разделительную линию в точке изменения, таким образом, что оно превышает второе отношение (WR/WT) ширин областей управления, заданных со ссылкой на разделительную линию, отличную от первой разделительной линии в точке изменения, и
разделительная линия, отличная от первой разделительной линии в точке изменения, присутствует в пределах зоны от точки изменения курса до точки перед рассматриваемым транспортным средством.
3. Устройство управления движением по п. 2,
в котором разделительная линия в точке изменения включает в себя вторую разделительную линию в точке изменения, присутствующую в пределах предварительно определенного второго расстояния, заданного от точки изменения курса до точки впереди рассматриваемого транспортного средства, и модуль задания задает отношение (WR/WT) ширин областей управления, заданных со ссылкой на вторую разделительную линию в точке изменения, таким образом, что оно превышает отношение (WR/WT) ширин областей управления, заданных со ссылкой на разделительную линию, отличную от первой разделительной линии в точке изменения, и
разделительная линия, отличная от первой разделительной линии в точке изменения, присутствует в пределах зоны от точки изменения курса до точки перед рассматриваемым транспортным средством.
4. Устройство управления движением по п. 3,
в котором модуль задания задает ширины WT областей управления таким образом, что они равны на завершающем крае первой разделительной линии в точке изменения и на начальном крае второй разделительной линии в точке изменения в направлении движения рассматриваемого транспортного средства.
5. Устройство управления движением по п. 3 или 4,
в котором области управления, заданные со ссылкой на первую разделительную линию в точке изменения, включают в себя области, отношение (WR/WT) ширин которых увеличивается, в качестве приближающихся к точке изменения курса, и
области управления, заданные со ссылкой на вторую разделительную линию в точке изменения, включают в себя области, отношение (WR/WT) ширин которых уменьшается, в качестве отдаляющихся от точки изменения курса.
6. Устройство управления движением по п. 1,
в котором, в то время как рассматриваемое транспортное средство движется на прямой дороге, модуль управления управляет позицией движения рассматриваемого транспортного средства таким образом, чтобы обеспечивать движение рассматриваемого транспортного средства около центра в направлении ширины полосы движения, в которой движется рассматриваемое транспортное средство.
7. Устройство управления движением по п. 1,
в котором, когда целевой маршрут движения рассматриваемого транспортного средства не задается, модуль управления управляет позицией движения рассматриваемого транспортного средства таким образом, чтобы обеспечивать движение рассматриваемого транспортного средства около центра в направлении ширины полосы движения, в которой движется рассматриваемое транспортное средство.
8. Устройство управления движением по п. 1,
в котором, когда операция руления пассажиром рассматриваемого транспортного средства обнаруживается, в то время как рассматриваемое транспортное средство движется рядом с разделительной линией в точке изменения, модуль управления запрещает управление позицией движения рассматриваемого транспортного средства.
9. Устройство управления движением по п. 1,
в котором модуль задания выполняет обнаружение разделительной линии в точке изменения таким образом, что длина разделительной линии в точке изменения в направлении движения рассматриваемого транспортного средства увеличивается по мере того, как ограничение скорости увеличивается на дороге, по которой движется рассматриваемое транспортное средство.
10. Устройство управления движением по п. 1,
в котором, когда объезжаемый объект, который должно объезжать рассматриваемое транспортное средство, обнаруживается, модуль управления управляет позицией движения рассматриваемого транспортного средства таким образом, чтобы управлять рассматриваемым транспортным средством таким образом, что оно объезжает объезжаемый объект, с приоритетом относительно управления для движения между парой областей управления.
11. Устройство управления движением по п. 10,
в котором, когда едущее сзади транспортное средство, которое предположительно должно обгонять или проезжать мимо рассматриваемого транспортного средства, обнаруживается в качестве объезжаемого объекта, модуль управления управляет позицией движения рассматриваемого транспортного средства таким образом, что величина управления для позиции движения в направлении ширины, когда рассматриваемое транспортное средство управляется таким образом, что оно объезжает объезжаемый объект около разделительной линии в точке изменения, меньше величины управления, когда рассматриваемое транспортное средство управляется таким образом, что оно объезжает объезжаемый объект около разделительной линии, отличной от разделительной линии в точке изменения.
12. Устройство управления движением по п. 10,
в котором, когда встречное транспортное средство, которое должно проезжать мимо рассматриваемого транспортного средства, обнаруживается в качестве объезжаемого объекта до того, как рассматриваемое транспортное средство проезжает мимо точки изменения курса, модуль задания задает отношение (WR/WT) ширин областей управления, заданных со ссылкой на разделительную линию в точке изменения меньше отношения (WR/WT) ширин областей управления, когда не обнаруживается встречное транспортное средство.
13. Устройство управления движением по п. 10,
в котором, когда управление выполняется таким образом, что рассматриваемое транспортное средство управляется таким образом, что оно объезжает объезжаемый объект посредством обгона или проезжания мимо объезжаемого объекта, модуль управления управляет позицией движения рассматриваемого транспортного средства таким образом, что величина управления для позиции движения в направлении ширины, когда рассматриваемое транспортное средство управляется таким образом, что оно объезжает объезжаемый объект около разделительной линии в точке изменения, меньше величины управления, когда рассматриваемое транспортное средство управляется таким образом, что оно объезжает объезжаемый объект около разделительной линии, отличной от разделительной линии в точке изменения.
14. Устройство управления движением по п. 1,
в котором модуль управления задает время инструктирования рассматриваемому транспортному средству объезжать объезжаемый объект в соответствии с классификацией объезжаемого объекта.
15. Устройство управления движением по п. 1, дополнительно содержащее:
модуль вывода, выполненный с возможностью выводить во внешнюю среду один или более информационных элементов из информации в соответствии с информацией разделительных линий, информации в соответствии с местоположениями областей управления и информации в соответствии с управлением позицией движения рассматриваемого транспортного средства.
16. Способ управления движением для транспортного средства, осуществляемый посредством компьютера, причем компьютер управляет рассматриваемым транспортным средством таким образом, что рассматриваемое транспортное средство движется между разделительными линиями справа и слева относительно рассматриваемого транспортного средства, при этом способ управления движением содержит этапы, на которых:
получают информацию рассматриваемого транспортного средства, включающую в себя позицию рассматриваемого транспортного средства;
получают информацию разделительных линий, включающую в себя позиции разделительных линий, присутствующих рядом с рассматриваемым транспортным средством;
задают области управления со ссылкой на разделительные линии, причем области управления имеют предварительно определенную ширину; и
управляют позицией движения рассматриваемого транспортного средства таким образом, что рассматриваемое транспортное средство движется между парой областей управления, заданных справа и слева относительно рассматриваемого транспортного средства, причем позиция движения рассматриваемого транспортного средства находится в направлении ширины полосы движения, в которой движется рассматриваемое транспортное средство,
задают области управления со ссылкой на разделительные линии, что включает в себя, когда пара областей управления, заданных со ссылкой на разделительную линию в точке изменения, содержит одну из пары на стороне изменения курса рассматриваемого транспортного средства и другую из пары, задание отношения (WR/WT) ширины WR другой к ширине WT одной таким образом, что оно превышает отношение (WR/WT) ширин областей управления, заданных со ссылкой на разделительную линию, отличную от разделительной линии в точке изменения, причем разделительная линия в точке изменения представляет собой разделительную линию, пересекающую линию направления ширины, включающую в себя точку изменения курса, в которой рассматриваемое транспортное средство начинает изменение курса, и идущую на предварительно определенное расстояние, причем точка изменения курса расположена впереди рассматриваемого транспортного средства в направлении движения, причем разделительная линия, отличная от разделительной линии в точке изменения, присутствует в пределах зоны от точки изменения курса до точки перед рассматриваемым транспортным средством.
| JP 5070171 B2, 07.11.2012 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ АВТОМОБИЛЯ В АВАРИЙНЫХ СИТУАЦИЯХ | 1991 |
|
RU2006385C1 |

