Область техники
Изобретение относится к области техники интеллектуального движения, в частности к подземной интеллектуальной системе управления движением и способу ее получения.
Уровень техники
В настоящее время безопасности производства угольных шахт уделяется пристальное внимание, и это является важным условием для гарантии выгод предприятий угольной промышленности и устойчивого и здорового развития. Подземный транспорт является ключевым звеном рудничного производства. В связи с усилением внимания в стране к безопасности рудничных работ и постоянным усилением надзора крупные и средние горнодобывающие предприятия приступили к разработке и оснащению системами производственного контроля безопасности подземного транспорта.
Будут проложены подземные выработки, а для перевозки людей, материалов и полезных ископаемых будут использоваться безрельсовые транспортные средства, однако, поскольку выработки, как правило, являются однополосными и двусторонними, это влияет не только на эффективность работы транспортных средств, но и представляет большую угрозу безопасности. Специфические условия шахты создали определенные трудности для точного позиционирования и связи подземных транспортных средств, если возникают проблемы в шахте (например, пробка автомобиля, поломка автомобиля и т.д.), это может привести к авариям, столкновениям сзади и другим несчастные случаи, которые серьезно повлияют на производительность, руководителям шахт также трудно своевременно понять динамическое распределение и работу подземных транспортных средств.
Традиционная система управления подземным движением основана на погребенных датчиках, а светофоры управляются с помощью сигналов запуска транспортных средств, как только датчик выйдет из строя, это повлияет на общую ситуацию выработок, а в особых ситуациях, таких как проезд крупных вспомогательных транспортных средств, однократный въезд в особых направлениях и т.д., нельзя активно контролировать.
Краткое описание изобретения
Техническая проблема, решаемая настоящим изобретением, заключается в следующем: для решения технической проблемы, заключающейся в том, что система управления и контроля подземным движением угольной шахты не может выполнять интеллектуальное управление в предшествующем уровне техники, настоящее изобретение обеспечивает интеллектуальную систему управления и контроля подземным движением. Интеллектуальное управление и контроль подземного движения осуществляется путем анализа информации о местоположении и направлении движения подземных транспортных средств с помощью контроллера, что повышает эффективность и безопасность подземных транспортных средств.
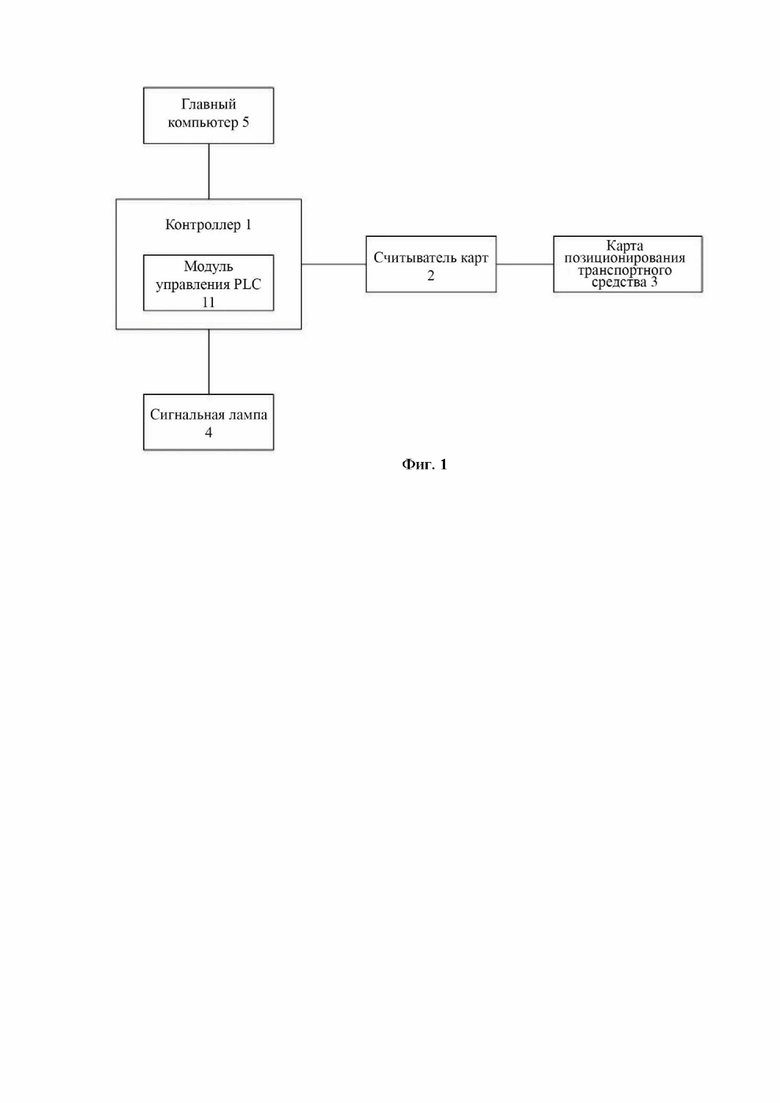
Техническим решением, принятым настоящим изобретением для решения технической задачи, является: подземная интеллектуальная система управления движением, которая отличается тем, что включает в себя контроллер, считыватель карт, карту позиционирования транспортного средства, сигнальную лампу и главный компьютер, считыватель карт и контроллер подключены через UDP-связь, карта позиционирования транспортного средства и считыватель карт подключены через UWB-связь, сигнальная лампа и контроллер подключены через RS485-связь, а контроллер и главный компьютер подключены через TCP-связь.
Подземная интеллектуальная система управления движением по настоящему изобретению считывает информацию о местоположении карты позиционирования транспортного средства через считыватель карт и отправляет ее на контроллер. контроллер формулирует логику движения транспортных средств на перекрестке в соответствии с информацией о местоположении и направлении движения транспортного средства и контролирует состояние сигнальных лампах для реализации управления движением транспортных средств в шахте, в то же время контроллер может загружать информацию о транспортном средстве, логику вождения и другую информацию на главный компьютер для хранения, что удобно для персонала для просмотра исторических записей.
Кроме того, в частности, внутри контроллера находится модуль управления PLC, считыватель карт подключен к модулю управления PLC через UDP-связь, сигнальная лампа подключена к модулю управления PLC через RS485-связь, а PLC управляет модулем с главным компьютером через TCP-связь. Модуль управления PLC может настраивать логику управления транспортным средством и может управлять переключением состояния сигнальных лампах; модуль управления PLC может быть подключен к различным коллекторам данных, а условная основа логического управления может быть обобщена в соответствии с для нужд функции логического управления.
Настоящее изобретение также обеспечивает способ подземной интеллектуальной системы управления движением, в котором применяется вышеупомянутая подземная интеллектуальная система управления движением, и включающий следующие этапы:
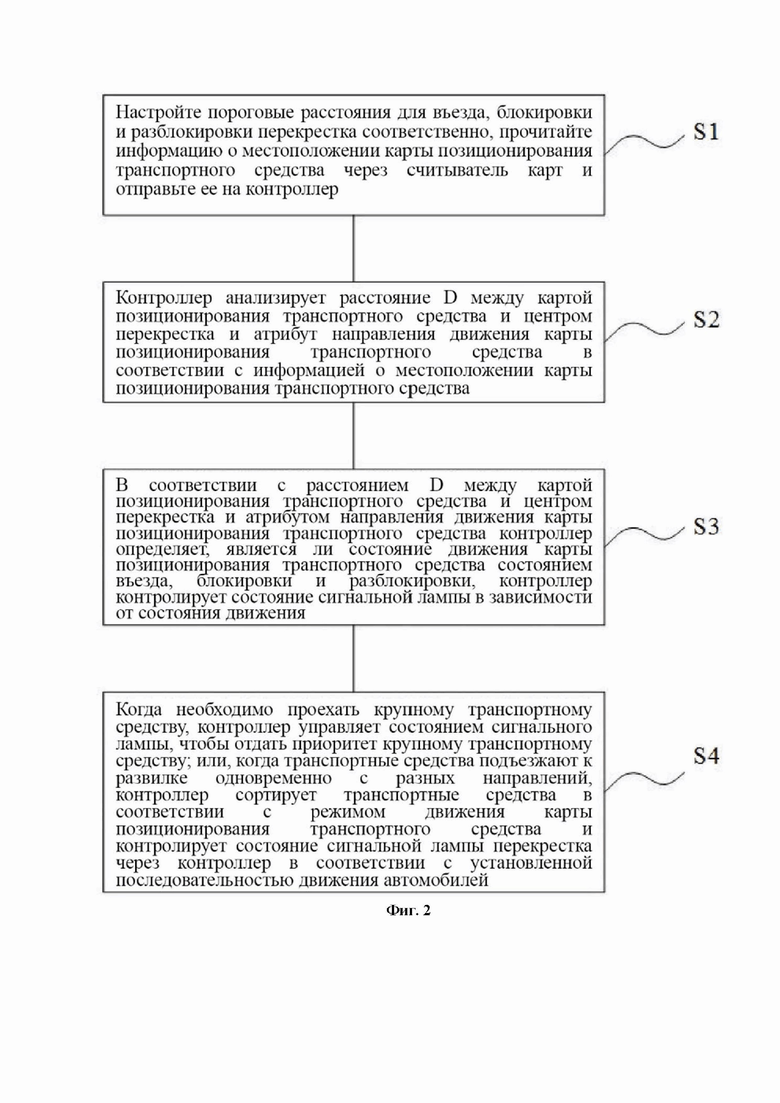
S1: настроить пороговые расстояния для въезда, блокировки и разблокировки перекрестка соответственно, прочитать информацию о местоположении карты позиционирования транспортного средства через считыватель карт и отправить ее на контроллер;
S2: контроллер анализирует расстояние D между картой позиционирования транспортного средства и центром перекрестка и атрибут направления движения карты позиционирования транспортного средства в соответствии с информацией о местоположении карты позиционирования транспортного средства;
S3: В соответствии с расстоянием D между картой позиционирования транспортного средства и центром перекрестка и атрибутом направления движения карты позиционирования транспортного средства контроллер определяет, является ли состояние движения карты позиционирования транспортного средства состоянием въезда, блокировки или разблокировки, контроллер контролирует состояние сигнальной лампы в зависимости от состояния движения;
S4: когда необходимо проехать крупному транспортному средству, контроллер управляет состоянием сигнальной лампы, чтобы отдать приоритет крупному транспортному средству; Или, когда транспортные средства подъезжают к развилке одновременно с разных направлений, контроллер сортирует транспортные средства в соответствии с режимом движения карты позиционирования транспортного средства и контролирует состояние сигнальной лампы перекрестка через контроллер в соответствии с очередности расставления транспортных средств.
Способ подземной интеллектуальной системы управления движением в соответствии с настоящим изобретением считывает информацию о местоположении карты позиционирования транспортного средства через считыватель карт и анализирует расстояние D между картой позиционирования транспортного средства и центром перекрестка и атрибут направления движения карты позиционирования транспортного средства с помощью контроллера в соответствии с информацией о местоположении, затем оцените состояние движения транспортного средства в соответствии с расстоянием D и атрибутом направления движения, чтобы контролировать состояние сигнальной лампы; при возникновении особой ситуации контроллер может сортировать приоритет транспортного средства в соответствии с состоянием вождения транспортного средства, чтобы повысить эффективность движения и безопасность транспортных средств выработок.
Кроме того, в частности, анализ расстояния D между картой позиционирования транспортного средства и центром перекрестка, в частности, включает в себя:
S20: Установите считыватель карт на одной стороне выработок. считыватель карт включает в себя антенну P и антенну N. Расстояние между антенной P и антенной N равно Y. Сверхширокополосная связь карты позиционирования транспортного средства для получения расстояния Y1 между картой определения позиционирования транспортного средства и антенной P и расстоянием Y2 между картой определения позиционирования транспортного средства и антенной N;
S21: Обозначьте расстояние между антенной рядом с перекрестком и центром перекрестка как L, а затем рассчитайте расстояние D между картой позиционирования транспортного средства и центром перекрестка в соответствии с расстояниями Y1 и Y2.
Кроме того, конкретно этап S21 включает в себя:
Считыватель карт устанавливается с правой стороны по ходу движения автомобиля, когда расстояние Y2 больше расстояния Y, а расстояние Y2 больше расстояния Y1, а расстояние Y1 больше расстояния L, расстояние между картой позиционирования транспортного средства и центром перекрестка D=Y1-L; когда расстояние Y2 больше расстояния Y1, а расстояние Y2 больше расстояния Y и расстояние Y1 меньше расстояния L, расстояние между картой позиционирования транспортного средства и центром перекрестка D=Y1-L; когда расстояние Y2 меньше расстояния Y, а расстояние Y1 меньше расстояния Y, или расстояние Y1 больше расстояния Y, а расстояние Y1 больше расстояния Y2, расстояние между картой позиционирования транспортного средства и центр пересечения D= -L-Y1.
Кроме того, в частности, синтаксический анализ атрибута направления движения карты позиционирования транспортного средства, в частности, включает в себя:
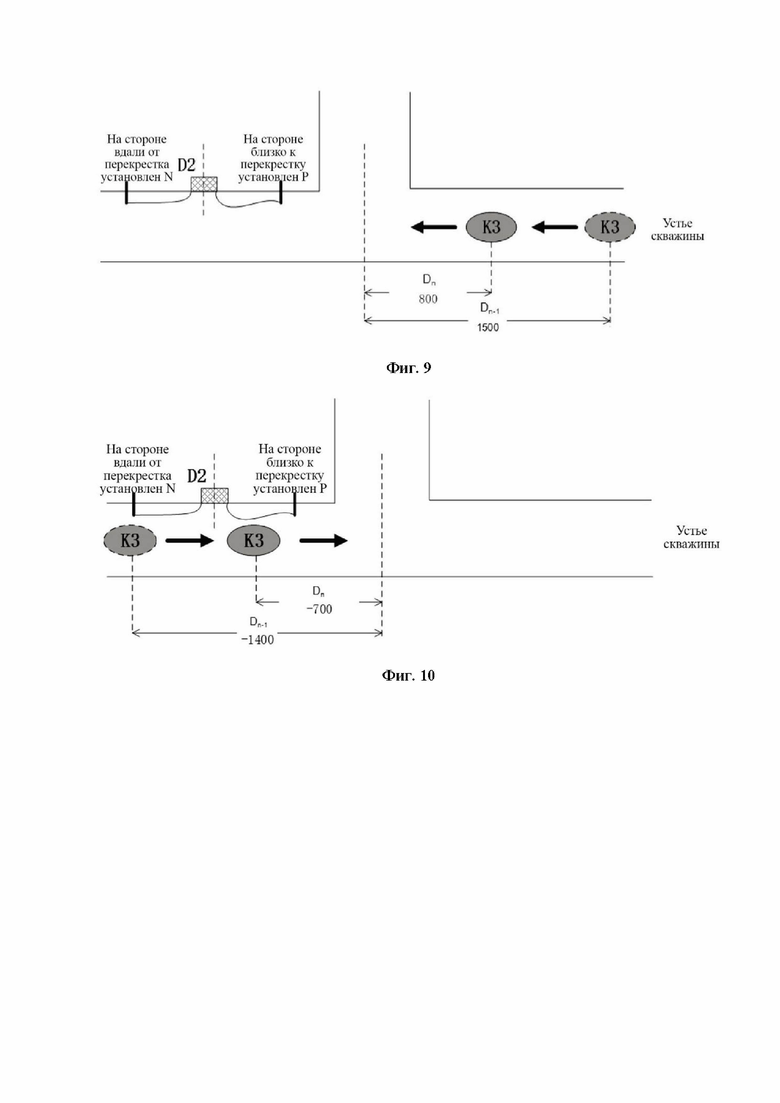
S200: определить движение карты позиционирования транспортного средства в направлении приближения к устью скважины как состояние 1 и определить движение карты позиционирования транспортного средства в направлении от устья скважины как состояние 2;
S201: вычислить разницу ΔD между текущим расстоянием Dn от карты позиционирования транспортного средства до центра перекрестка и предыдущим расстоянием Dn-1 от карты позиционирования транспортного средства до центра перекрестка;
S202: установить порог сравнения на 300 см, и если разница ΔD меньше -300 см, определите, что текущий атрибут направления движения карты позиционирования транспортного средства находится в состоянии 2; если разница ΔD больше 300 см, определите, что текущий атрибут направления движения карты позиционирования транспортного средства находится в состоянии 1.
Установка порога на 300 см означает, что расстояние позиционирования может колебаться, что может сделать определение направления движения более точным.
Кроме того, конкретно этап S3 включает в себя: обозначение порогового расстояния въезда как А, порогового расстояния блокировки как В и порогового расстояния разблокировки как С; когда расстояние D между картой позиционирования транспортного средства и центром перекрестка меньше порогового расстояния A въезда, считается, что карта позиционирования транспортного средства находится в состоянии въезда, и контроллер подсчитывает карту позиционирования транспортного средства, движущегося в направлении движения карты позиционирования автомобиля, подлежащее освобождению; когда расстояние D между картой позиционирования транспортного средства и центром перекрестка меньше, чем пороговое расстояние блокировки B, определяется, что состояние движения карты позиционирования транспортного средства является состоянием блокировки, и контроллер управляет сигнальной лампой в направлении движения, чтобы он был зеленым, позволяя транспортным средствам проезжать, а контроллер регулирует сигнальные лампы других направлений движения, чтобы они были красными, запрещая проезд транспортных средств; когда расстояние D между картой позиционирования транспортного средства и центром перекрестка больше, чем пороговое расстояние разблокировки C, определяется, что состояние движения карты позиционирования транспортного средства является состоянием разблокировки, и сигнальные лампы контроллера, управляющей другим движением направления зеленые, снять запрет.
Кроме того, пороговое расстояние А въезда больше, чем пороговое расстояние В блокировки, пороговое расстояние В блокировки больше, чем пороговое расстояние С разблокировки, и пороговое расстояние А въезда больше, чем пороговое расстояние блокировки B, разница между пороговым расстоянием A столбца и пороговым расстоянием B блокировки больше 10 метров, а разница между пороговым расстоянием B блокировки и пороговым расстоянием C разблокировки больше 10 метров. Въезд означает, что транспортное средство выезжает на текущую дорогу, чтобы встать в очередь на проезд; блокировка означает, что разрешено движение только в текущем направлении движения, а другие направления движения запрещены; разблокировка означает, что другие направления движения освобождаются от запрета проезда.
Положительный эффект настоящего изобретения заключается в том, что подземная интеллектуальная система управления движением и способ настоящего изобретения могут реализовывать такие функции, как самоопределяемые логические правила, логическая проверка и онлайн-обновление программы путем установки модуля управления PLC внутри управляющей машины, и может реализовать функции пользовательских логических правил, логической проверки и онлайн-обновления программы в соответствии с реальной ситуацией в шахте. Индивидуальный дизайн правил дорожного движения делает управление подземным движением более интеллектуальным и рациональным. Для нужд различных сайтов существующая логика управления может быть отсортирована, основа условия и логическая взаимосвязь управления могут быть разумно классифицированы, чтобы персонал по внедрению и техническому обслуживанию мог их понять, а гибкие и удобные логические взаимосвязи могут быть разработан для адаптации к различным потребностям сайта, обеспечивая при этом надежность и стабильность функции логического управления. Настоящее изобретение разрабатывает логику управления правилами движения (то есть логику управления состоянием световой лампы) в соответствии с расстоянием D между картой позиционирования транспортного средства и центром перекрестка (то есть информацией о местоположении карты позиционирования транспортного средства) и атрибут направления движения карты позиционирования транспортного средства, который может быть более точным. Улучшить логику управления движением, повысить эффективность и безопасность эксплуатации подземных транспортных средств и уменьшить количество аварий. Контроллер по настоящему изобретению также может быть сконфигурирована с количествомперекрестков, количеством разветвленных пересечений, пороговым расстоянием блокировки, пороговым расстоянием разблокировки и пороговым расстоянием въезда, а также управлять различными состояниями световой лампы в зависимости от различных пороговых расстояний, ситуация имеет приоритет для освобождения, чтобы избежать пробок и других явлений. Изобретение может сформулировать логику управления движением и контролем в соответствии с различными шахтами и различными средами, чтобы удовлетворить различные требования к управлению и контролю.
Краткое описание чертежей
Настоящее изобретение будет дополнительно описано ниже вместе с прилагаемыми чертежами и вариантами осуществления.
Чертеж 1 представляет собой конструктивную схему подземной интеллектуальной системы управления движением согласно настоящему изобретению.
Чертеж 2 представляет собой блок-схему способа интеллектуального управления подземным движением согласно настоящему изобретению.
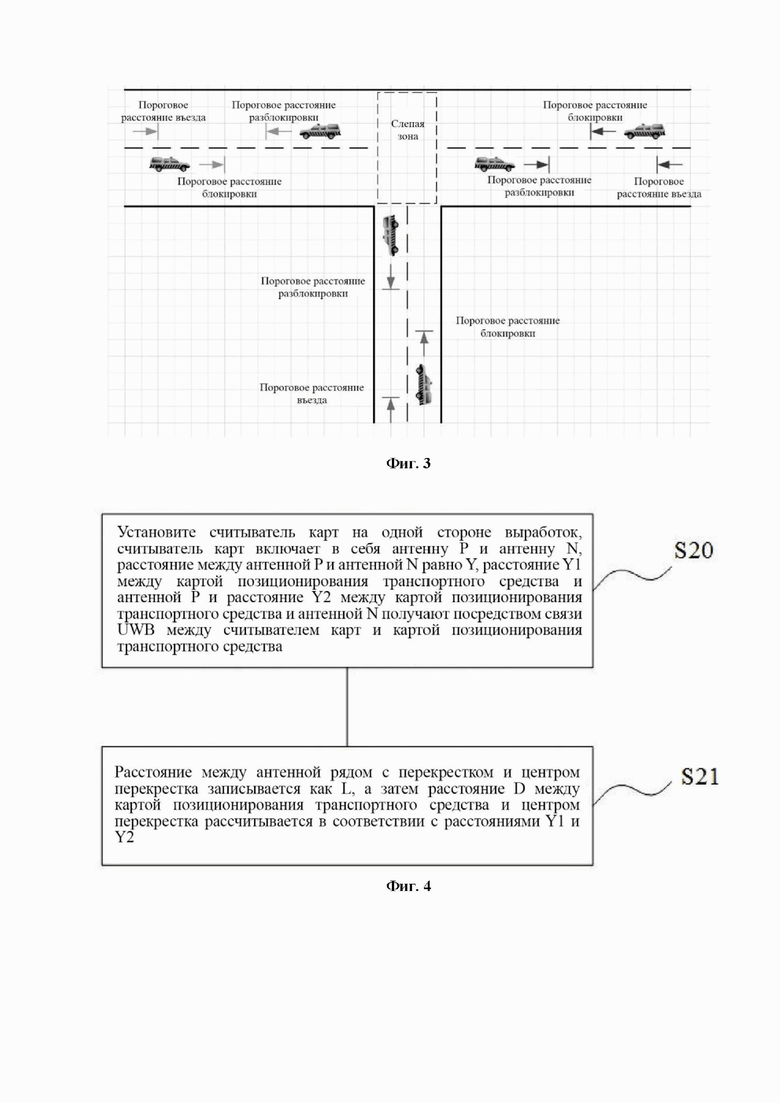
Чертеж 3 представляет собой схему пороговых расстояний въезда, блокировки и разблокировки согласно настоящему изобретению.
Чертеж 4 представляет собой блок-схему контроллера по настоящему изобретению, анализирующую расстояние D между картой позиционирования транспортного средства и центром перекрестка.
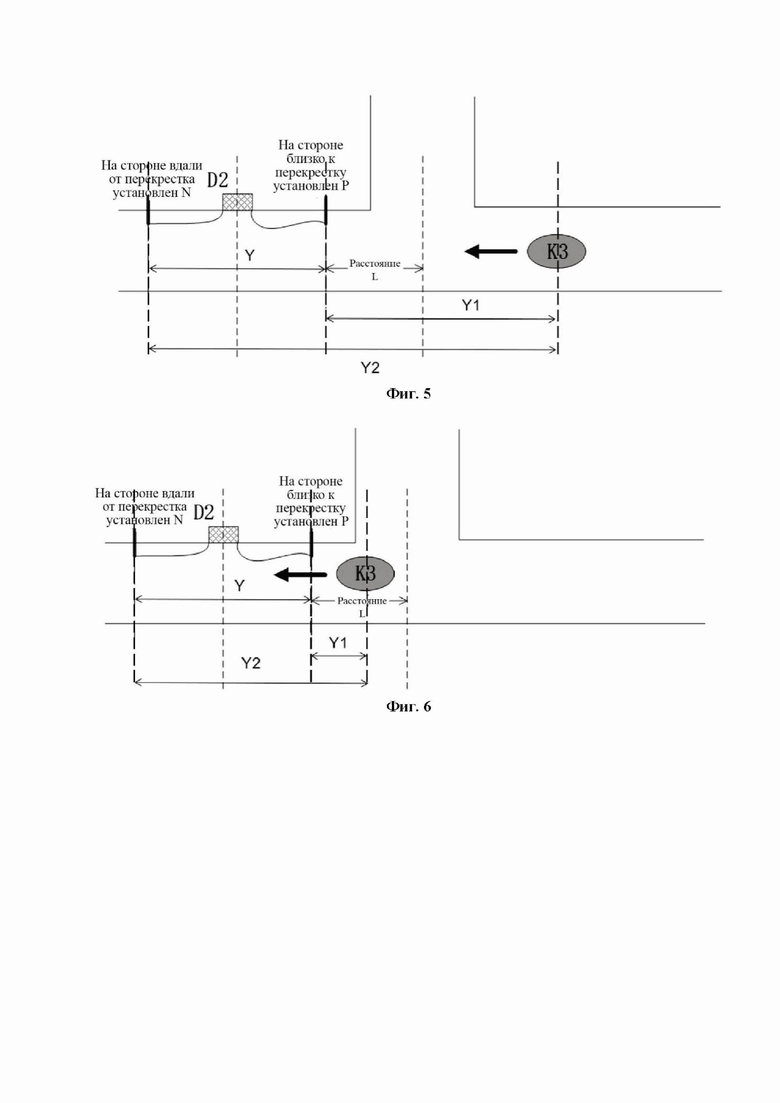
Чертеж 5 представляет собой первый случай анализа расстояния D между картой позиционирования транспортного средства и центром перекрестка в настоящем изобретении.
Чертеж 6 представляет собой второй случай анализа расстояния D между картой позиционирования транспортного средства и центром перекрестка в настоящем изобретении.
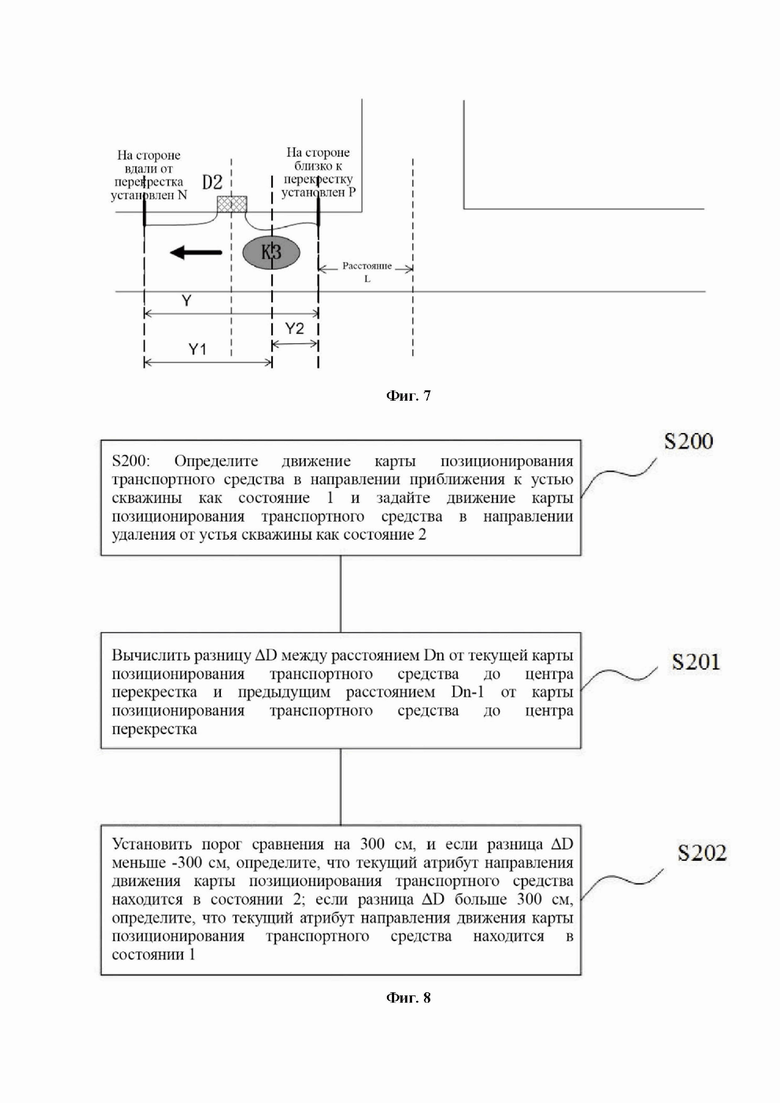
Чертеж 7 представляет собой третий случай анализа расстояния D между картой позиционирования транспортного средства и центром перекрестка в настоящем изобретении.
Чертеж 8 представляет собой блок-схему анализа атрибута направления движения карты позиционирования транспортного средства с помощью контроллера по настоящему изобретению.
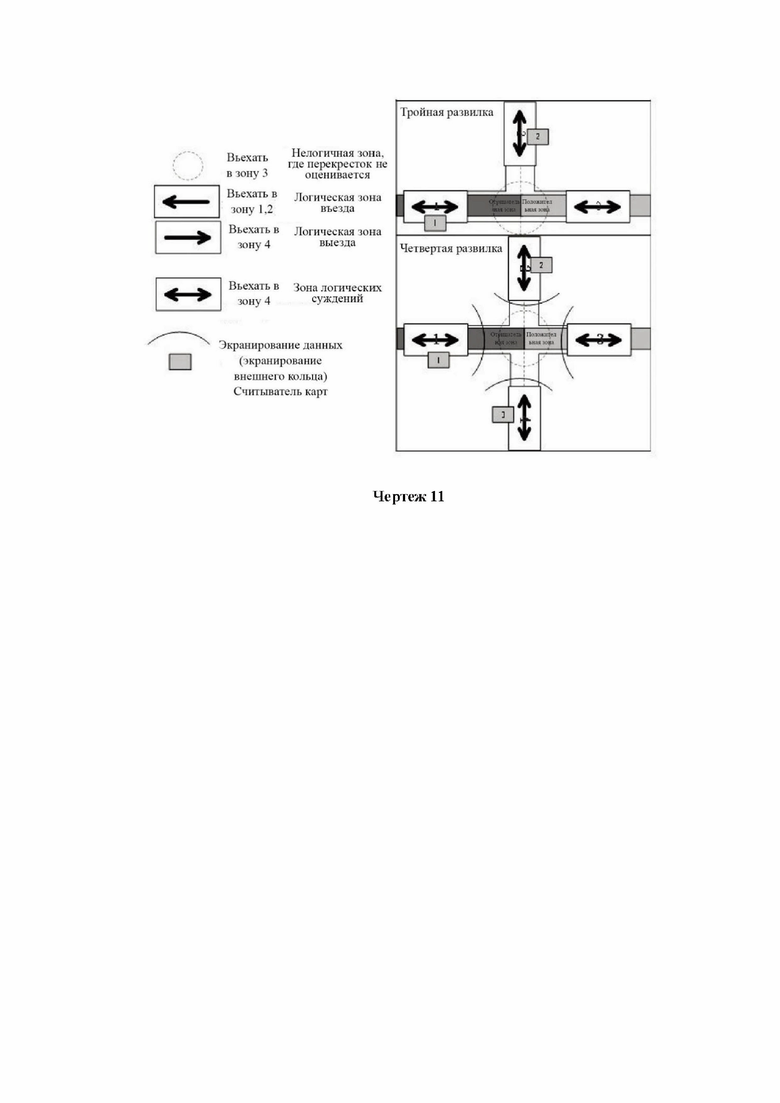
Чертеж 9 представляет собой случай, в котором настоящее изобретение оценивает атрибут направления движения карты позиционирования транспортного средства.
Чертеж 10 представляет собой другой случай настоящего изобретения для оценки атрибута направления движения карты позиционирования транспортного средства.
Чертеж 11 представляет собой схему настоящего изобретения для размещения считывателя карт на развилке.
На чертежах: 1. Контроллер, 2. Считыватель карт, 3. Карта позиционирования транспортного средства, 4. Сигнальная лампа, 5. Главный компьютер, 11. Модуль управления PLC.
Вариант осуществления изобретения
Далее настоящее изобретение будет описано более подробно со ссылкой на прилагаемые чертежи. Все эти чертежи представляют собой упрощенные схематические представления и только схематично иллюстрируют базовую структуру настоящего изобретения, поэтому на них показаны только структуры, относящиеся к настоящему изобретению.
При описании настоящего изобретения следует понимать, что термины «центр», «продольный», «латеральный», «длина», «ширина», «толщина», «верхний», «нижний», «Спереди», «Сзади», «Слева», «Справа», «Вертикально», «Горизонтально», «Сверху», «Низ», «Внутри», «Снаружи», «По часовой стрелке», «Против часовой стрелки», Ориентация или взаимное расположение, обозначенное как «осевое», «радиальное», «периферийное» и т.д., основано на ориентации или взаимном расположении, показанных на чертежах, и предназначено только для удобства описания настоящего изобретения и упрощения описания, а не для указания или подразумевания указанного устройства или элемента. Оно должно иметь определенную ориентацию, быть сконструировано и работать в определенной ориентации, и поэтому его не следует рассматривать как ограничение настоящего изобретения. Кроме того, признаки, ограниченные «первым», «вторым», могут явно или неявно включать в себя один или несколько таких признаков. В описании настоящего изобретения, если не указано иное, «множество» означает два или более.
При описании настоящего изобретения следует отметить, что термины «установленный», «подключенный» и «подключенный» следует понимать в широком смысле, если иное прямо не указано и не ограничивается, например, это может быть фиксированное соединение. или разъемное соединение Соединение, или встроенное соединение, может быть механическое соединение, также может быть электрическое соединение, может быть прямое соединение, также может быть косвенное соединение через промежуточную среду, может быть внутренней связью между двумя элементами. Специалистам в данной области конкретные значения приведенных выше терминов в настоящем изобретении могут быть понятны в конкретных ситуациях.
Вариант осуществления I
Как показано на чертеж 1, подземная интеллектуальная система управления движения включает в себя контроллер 1, считыватель карт 2, карту позиционирования транспортного средства 3, сигнальную лампу 4 и главный компьютер 5, считыватель карт 2 и контроллер 1 соединены через UDP-связь. Карта позиционирования транспортного средства 3 подключена к считывателю карт 2 через UWB-связь, сигнальная лампа 4 подключена к контроллеру 1 через RS485-связь, а контроллер 1 и главный компьютер 5 подключены через TCP-связь. В этом варианте осуществления контроллер 1 снабжен модулем управления PLC 11, считыватель карт 2 подключено к модулю управления PLC 11 через UDP-связь, сигнальная лампа 4 подключена к модулю управления PLC 11 через RS485-связь, и модуль управления PLC 11 соединен с главным компьютером 5 посредством связи TCP.
В этом варианте осуществления модуль управления PLC 11 может расширять различные специальные интерфейсные платы или шинные датчики, исполнительные механизмы и контроллеры через шину, выполнять сбор невизуальной обработки аналоговых или цифровых величин и использовать шину Modbus RTU для получения вычислений и результаты анализа, использовать программируемое логическое управление IEC61131-3, расчет объединения нескольких датчиков в реальном времени выполняется в соответствии с моделью расчета объединения нескольких датчиков для формирования результатов голосования. Считыватель карт 2 может быть считывателем карт D2, а карта 3 позиционирования транспортного средства может быть картой позиционирования транспортного средства K3, считыватель карт 2 устанавливается на подстанции позиционирования, а карта позиционирования транспортного средства 3 устанавливается на транспортном средстве, когда транспортное средство въезжает в определенную область, карта позиционирования транспортного средства 3 может быть распознана считывателем карт 2, и считыватель карт 2 может отправить идентифицированную информацию о карты позиционирования транспортного средства 3 на контроллер 1, один контроллер 2 может быть подключен к нескольким считывателям карт 2, считыватель карт 2 устанавливается по обеим сторонам выработок и устанавливается по мере необходимости, один считыватель карт 2 может одновременно собирать информацию о местоположении нескольких карт позиционирования транспортных средств 3, а контроллер 1 может обрабатывать информацию о местоположении соответствующей карты позиционирования транспортного средства 3 по мере необходимости.
Контроллер 1 этого варианта осуществления может реализовывать такие функции, как самоопределяемая логика, повторная проверка логики и онлайн-обновление программы с помощью встроенного модуля управления PLC 11, модуль управления PLC 11 объединяет функции операций, функции управления измерениями и функции связи, и контролируемой системой можно управлять в режиме реального времени и надежно. Модуль управления PLC 11 поддерживает различные стандартные протоколы связи, а также может реализовывать связь по пользовательскому протоколу посредством программирования и может гибко подключаться к различным устройствам расширения для формирования мощной системы измерения и управления. Модуль управления PLC 11 поддерживает программную среду Codesys, основанную на языке программирования IEC61131-3, поэтому персонал, выполняющий прикладные программы, может реализовывать пользовательскую логику в соответствии с реальным приложением. При практическом применении традиционных контроллеров часто возникает проблема неудобного обновления программы, контроллер этого варианта осуществления значительно улучшила онлайн-обновление программы, контроллер можно подключить к кольцевой сети, задав соответствующий IP кольцевой сети через модуль управления PLC, техники могут отлаживать и обновлять программу в контроллере только при доступе к кольцевой сети, технические специалисты также могут использовать программное обеспечение Codesys для подключения модуля управления PLC через кольцевую сеть и осуществлять онлайн-проверку логики, добавляя точки останова в программу и контролируя мониторинг ввода и вывода I/O.
Вариант осуществления II
Как показано на чертеж 2, способ подземной интеллектуальной системы управления движением с использованием системы по варианту I осуществления включает в себя следующие этапы:
S1: Настройте пороговые расстояния въезда, блокировки и разблокировки перекрестка соответственно, прочитайте информацию о местоположении карты позиционирования транспортного средства через считыватель карт и отправьте ее на контроллер.
Следует отметить, что пороговое расстояние въезда - A, пороговое расстояние блокировки - B, а пороговое расстояние разблокировки - C, все пороговые расстояния A, B и C являются числовыми значениями, а единица измерения - метры, расстояние A больше, чем пороговое расстояние B, пороговое расстояние B больше, чем пороговое расстояние C, а разница между пороговым расстоянием A и пороговым расстоянием B превышает 10 метров, и разница между пороговым расстоянием B и пороговым расстоянием C превышает 10 метров, как показано на рис. 3, считыватель карт установлен на каждых выработках перекрестка, и информация о местоположении карты позиционирования транспортного средства может быть одновременно получена только с помощью уникального считывателя карт, Когда транспортное средство находится в определенной зоне, а выработка, по которым движется транспортное средство, не совпадает с выработками, на которых расположен считыватель карт, получивший информацию о местоположении, в которой находится транспортное средство, называется слепой зоной, когда транспортное средство находится в слепой зоне, интеллектуальное управление не осуществляется, контроллер может получать информацию о местоположении карты позиционирования транспортного средства, то есть информацию о местоположении транспортного средства, посредством связи со считывателем карт.
S2: Контроллер анализирует расстояние D между картой позиционирования транспортного средства и центром перекрестка и атрибут направления движения карты позиционирования транспортного средства в соответствии с информацией о местоположении карты позиционирования транспортного средства.
Как показано на рис. 4, контроллер анализирует расстояние D между картой позиционирования транспортного средства и центром перекрестка, в частности включает:
S20: Установите считыватель карт на одной стороне выработок, считыватель карт включает в себя антенну P и антенну N, расстояние между антенной P и антенной N равно Y, расстояние Y1 между картой позиционирования транспортного средства и антенной P и расстояние Y2 между картой позиционирования транспортного средства и антенной N получают посредством UWB-связи между считывателем карт и картой позиционирования транспортного средства.
S21: расстояние между антенной рядом с перекрестком и центром перекрестка записывается как L, а затем расстояние D между картой позиционирования транспортного средства и центром перекрестка рассчитывается в соответствии с расстояниями Y1 и Y2.
Как показано на рис. 5-7, например, считыватель карт D2 установлен справа от направления движения автомобиля, антенна P установлена со стороны считывателя карт D2 ближе к перекрестку, а антенна N установлен на стороне считывателя карт D2 вдали от перекрестка, когда расстояние Y2 больше, чем расстояние Y, а расстояние Y2 больше, чем расстояние Y1, а расстояние Y1 больше, чем расстояние L, расстояние между картой позиционирования транспортного средства и центра перекрестка D=Y1-L, в это время можно считать, что транспортное средство не проехало центр перекрестка. Когда расстояние Y2 больше расстояния Y1, а расстояние Y2 больше расстояния Y и расстояние Y1 меньше расстояния L, расстояние между картой позиционирования транспортного средства и центром перекрестка D=Y1-L, в это время можно считать, что транспортное средство проехало центр перекрестка, но еще не проехало Антенна P. Когда расстояние Y2 меньше расстояния Y, а расстояние Y1 меньше расстояния Y, или расстояние Y1 больше расстояния Y, а расстояние Y1 больше расстояния Y2, расстояние между картой позиционирования транспортного средства и центр перекрестка D= -L-Y1, в это время можно считать, что транспортное средство проехало центр перекрестка и миновало антенну P.
Как показано на рис. 8, контроллер анализирует атрибуты направления движения карты позиционирования транспортного средства, в частности, включая:
S200: Определите движение карты позиционирования транспортного средства в направлении приближения к устью скважины как состояние 1 и задайте движение карты позиционирования транспортного средства в направлении удаления от устья скважины как состояние 2.
S201: Вычислить разницу ΔD между расстоянием Dn от текущей карты позиционирования транспортного средства до центра перекрестка и предыдущим расстоянием Dn-1 от карты позиционирования транспортного средства до центра перекрестка.
S202: установите порог сравнения на 300 см, и если разница ΔD меньше -300 см, определите, что текущий атрибут направления движения карты позиционирования транспортного средства находится в состоянии 2; если разница ΔD больше 300 см, определите, что текущее движение Атрибут направления карты позиционирования транспортного средства имеет состояние 1.
Как показано на рис. 9, в это время расстояние от текущей карты позиционирования транспортного средства до центра перекрестка Dn=800 см, расстояние от последней карты позиционирования транспортного средства до центра перекрестка Dn-1=1500 см, разница ΔD=-700см, в это время разница - Если 700 см меньше -300 см, текущим атрибутом направления движения транспортного средства является состояние 2, то есть транспортное средство удаляется от устья скважины.
Как показано на рис. 10, в это время расстояние между текущей картой позиционирования транспортного средства и центром перекрестка Dn=-700 см, последнее расстояние от карты позиционирования транспортного средства до центра перекрестка Dn-1=-1400 см, разница ΔD=700 см, разница в это время. Если 700 см больше 300 см, текущий атрибут направления движения транспортного средства находится в состоянии 1, то есть транспортное средство движется в направлении, близком к устью скважины.
S3: В соответствии с расстоянием D между картой позиционирования транспортного средства и центром перекрестка и атрибутом направления движения карты позиционирования транспортного средства контроллер определяет, является ли состояние движения карты позиционирования транспортного средства состоянием въезда, заблокированным состоянием или разблокированное состояние, а контроллер управляет сигнальной лампой в соответствии с состоянием вождения.
Следует отметить, что когда расстояние D между картой позиционирования транспортного средства и центром перекрестка меньше порогового расстояния въезда A, состояние движения карты позиционирования транспортного средства оценивается как состояние въезда, и контроллер подсчитывает транспортные средства. быть выпущенным в направлении движения карты позиционирования транспортного средства. Когда расстояние D между картой позиционирования транспортного средства и центром перекрестка меньше, чем пороговое расстояние блокировки B, определяется, что состояние движения карты позиционирования транспортного средства является заблокированным, и сигнальная лампа контроллера направление движения обозначено зеленым цветом, что позволяет транспортным средствам проезжать, а контроллер контролирует другое движение, указатели поворота красные, движение запрещено. Когда расстояние D между картой позиционирования транспортного средства и центром перекрестка больше, чем пороговое расстояние разблокировки C, состояние движения карты позиционирования транспортного средства считается разблокированным, и сигнальные лампы контроллера для управления другими направлениями движения горят зеленым цветом., и запрет снят. Логика управления движением может быть улучшена более точно путем оценки состояния движения транспортного средства путем объединения расстояния D между картой позиционирования транспортного средства и центром перекрестка и атрибута направления движения карты позиционирования транспортного средства. Структура логического правила способа управления и контроля в этом варианте осуществления также связана с количеством развилок дороги выработок, перекрестки можно разделить на три развилки, четыре развилки, пять развилок, двутавровые перекрестки и т.д., правила логики движения разных разветвлений различны, чтобы логика движения каждого перекрестка была понятна, количество считывателей карт должно быть не менее (количество развилок - 1), например, минимум 2 карты считыватели могут быть установлены на трех развилках. По крайней мере 3 считывателя карт (как показано на рис. 11) могут быть установлены на четырехстороннем развилках и так далее.
S4: когда необходимо проехать крупным транспортным средствам, контроллер управляет состоянием сигнальных лампах, чтобы отдать приоритет крупным транспортным средствам; или, когда транспортные средства одновременно подъезжают к развилке с разных направлений, контроллер сортирует транспортные средства в соответствии с направлением движения. статус карты позиционирования транспортного средства, а затем сортирует транспортные средства в соответствии с упорядоченной последовательностью транспортных средств через управляющую машину для контроля состояния сигнальных лампах на перекрестке.
Следует отметить, что контроллер будет отдавать приоритет особым ситуациям и отдавать приоритет крупным транспортным средствам, таким как грузовики, чтобы избежать заторов на проезжей части; когда транспортные средства прибывают с разных направлений на развилку одновременно, они будут сортироваться в соответствии с порядком, в котором транспортные средства въезжают в соответствии с порядком транспортных средств, контроллер будет контролировать состояние сигнальных лампах на перекрестке и снять запретительные ограничения в свою очередь.
Кроме того, когда большое количество транспортных средств въезжает в одном направлении, чтобы другие перекрестки не ждали в течение длительного времени, когда транспортные средства в одном направлении достигают установленного порога, контроллер может контролировать состояние сигнальных лампах, чтобы дать приоритет перед другими перекрестками. Контроллер также имеет логическую функцию очистки сверхурочной работы, которая может предотвратить ошибочную оценку контроллером того, что транспортное средство всегда находится на выработках, когда карта позиционирования транспортного средства отключена в течение длительного времени. Контроллер также имеет функцию переключения синхронизации, которая может переключать режимы управления синхронизацией для достижения управления триггером синхронизации.
Подводя итог, можно сказать, что подземная интеллектуальная система управления движением и способ согласно настоящему изобретению могут реализовывать такие функции, как самоопределяемые логические правила, логическая проверка и онлайн-обновление программы путем установки модуля управления PLC внутри контроллера, и правила дорожного движения могут быть настроены в соответствии с реальной ситуацией в шахте, что делает управление подземным движением более интеллектуальным и рациональным. Для нужд различных сайтов существующая логика управления может быть отсортирована, основа условия и логическая взаимосвязь управления могут быть разумно классифицированы, чтобы персонал по внедрению и техническому обслуживанию мог их понять, а гибкие и удобные логические взаимосвязи могут быть разработан для адаптации к различным потребностям сайта, обеспечивая при этом надежность и стабильность функции логического управления. Настоящее изобретение разрабатывает логику управления правилами движения (то есть логику управления состоянием световой лампы) в соответствии с расстоянием D между картой позиционирования транспортного средства и центром перекрестка (то есть информацией о местоположении карты позиционирования транспортного средства) и атрибут направления движения карты позиционирования транспортного средства, который может быть более точным. Улучшить логику управления движением, повысить эффективность и безопасность эксплуатации подземных транспортных средств и уменьшить количество аварий. Контроллер по настоящему изобретению также может быть сконфигурирована с количеством перекрестков, количеством разветвленных пересечений, пороговым расстоянием блокировки, пороговым расстоянием разблокировки и пороговым расстоянием въезда, а также управлять различными состояниями световой лампы в зависимости от различных пороговых расстояний, ситуация имеет приоритет для освобождения, чтобы избежать пробок и других явлений. Изобретение может сформулировать логику управления движением и контролем в соответствии с различными шахтами и различными средами, чтобы удовлетворить различные требования к управлению и контролю.
Взяв за основу приведенные выше идеальные варианты осуществления настоящего изобретения и посредством приведенного выше описания, соответствующий персонал может вносить различные изменения и модификации, не отходя от технической идеи настоящего изобретения. Технический объем настоящего изобретения не ограничен содержанием в описании, и технический объем должен быть определен в соответствии с объемом формулы изобретения.
Группа изобретений относится к подземной интеллектуальной системе управления движением и может быть использована для управления движением транспортных средств в шахте. Техническим результатом является повышение безопасности движения подземных транспортных средств. Система содержит контроллер, считыватель карт, включающий в себя две антенны, карту позиционирования транспортного средства, сигнальную лампу, главный компьютер, содержащий модуль управления PLC. 2 н.п. ф-лы, 11 ил.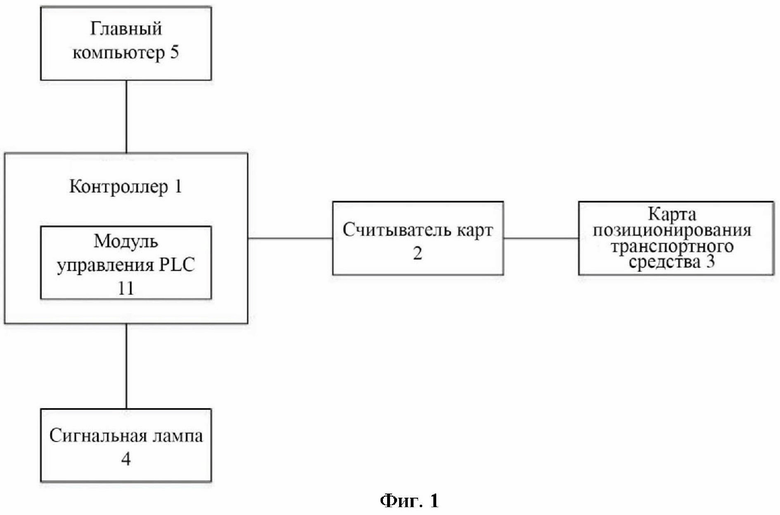
1. Подземная интеллектуальная система управления движением, включающая:
• контроллер (1),
• считыватель карт (2),
• карту позиционирования транспортного средства (3),
• сигнальную лампу (4),
• при этом считыватель карт (2) и контроллер (1) подключены через UDP-связь,
• сигнальная лампа (4) и контроллер (1) подключены через RS485-связь,
отличающаяся тем, что:
• система включает в себя также главный компьютер (5),
• карта позиционирования транспортного средства (3) и считыватель карт (2) подключены через UWB-связь,
• контроллер (1) и главный компьютер (5) подключены через TCP-связь,
• внутри контроллера (1) расположен модуль управления PLC (11),
• считыватель карт (2) подключен к модулю управления PLC (11) через UDP-связь,
• сигнальная лампа (4) подключена к модулю управления PLC (11) подключен через RS485-связь,
• модуль управления PLC (11) подключен к главному компьютеру (5) через TCP-связь,
• считыватель карт (2) включает в себя две антенны: P и N, при этом антенна Р установлена ближе к перекрестку, а антенна N дальше от перекрестка.
2. Способ интеллектуального управления подземным дорожным движением с использованием подземной интеллектуальной системы управления движением по п. 1, включающий следующие этапы, при которых:
S1: настраивают пороговые расстояния для въезда, блокировки и разблокировки перекрестка соответственно, считывают информацию о местоположении карты позиционирования транспортного средства через считыватель карт и отправляют ее на контроллер;
S2: анализируют с помощью контроллера расстояние D между картой позиционирования транспортного средства и центром перекрестка и устанавливают атрибут направления движения карты позиционирования транспортного средства в соответствии с информацией о местоположении карты позиционирования транспортного средства;
S3: в соответствии с расстоянием D между картой позиционирования транспортного средства и центром перекрестка и атрибутом направления движения карты позиционирования транспортного средства с помощью контроллера определяют, является ли состояние движения карты позиционирования транспортного средства состоянием въезда, блокировки и разблокировки, с помощью контроллера контролируют состояние сигнальной лампы в зависимости от состояния движения;
S4: когда необходимо проехать крупному транспортному средству, с помощью контроллера управляют состоянием сигнального лампы, чтобы отдать приоритет крупному транспортному средству; или, когда транспортные средства подъезжают к развилке одновременно с разных направлений, с помощью контроллера сортируют транспортные средства в соответствии с режимом движения карты позиционирования транспортного средства и контролируют состояние сигнальной лампы перекрестка через контроллер в соответствии с установленной последовательностью движения транспортных средств,
отличающийся тем, что:
на этапе S2:
• S20: устанавливают считыватель карт (2) на одной стороне дорожного полотна, при этом
• расстояние между антенной P и антенной N считывателя карт (2), принимают равным за Y,
• вычисляют расстояние Y1 между картой позиционирования транспортного средства и антенной P,
• вычисляют расстояние Y2 между картой позиционирования транспортного средства и антенной N;
• S21: обозначают расстояние между антенной P и центром перекрестка как L, рассчитывают расстояние D между картой позиционирования транспортного средства и центром перекрестка как
• D=Y1-L, если расстояние Y1 больше расстояния L,
• D = L-Y1, если расстояние Y1 меньше расстояния L,
• при этом анализируют атрибут направления движения карты позиционирования транспортного средства, для чего:
• S200: определяют движение карты позиционирования транспортного средства как состояние 1 если оно движется в направлении приближения к устью скважины и как состояние 2 если оно движется в направлении от устья скважины;
• S201: вычисляют разницу ΔD между текущим расстоянием Dn от карты позиционирования транспортного средства до центра перекрестка и предыдущим расстоянием Dn-1 от карты позиционирования транспортного средства до центра перекрестка;
• S202: устанавливают порог сравнения на 300 см, и если разница ΔD меньше 300 см, считают, что текущий атрибут направления движения карты позиционирования транспортного средства находится в состоянии 2; а если разница ΔD больше 300 см, считают, что текущий атрибут направления движения карты позиционирования транспортного средства находится в состоянии 1,
на этапе S3:
• обозначают пороговое расстояния въезда как А,
• пороговое расстояния блокировки как В,
• пороговое расстояния разблокировки как С;
• когда расстояние D между картой позиционирования транспортного средства и центром перекрестка меньше порогового расстояния A въезда, считают, что транспортное средство находится в состоянии въезда, и контроллер открывает дорогу указанному транспортному средству путем направления сигнала на сигнальную лампу - зеленый свет;
• когда расстояние D между картой позиционирования транспортного средства и центром перекрестка меньше, чем пороговое расстояние блокировки B, считают, что состояние движение транспортного средства является состоянием блокировки, и контроллер управляет сигнальной лампой в направлении движения, чтобы свет был зеленым, позволяя транспортным средствам проезжать, а контроллер регулирует сигнальные лампы перпендикулярных направлений движения, чтобы они были красными, запрещая проезд транспортных средств в других направлениях;
• когда расстояние D между картой позиционирования транспортного средства и центром перекрестка больше, чем пороговое расстояние разблокировки C, считают, что состояние движения транспортного средства является состоянием разблокировки, и контроллер отправляет сигнал на сигнальные лампы, чтобы, снять запрет движения,
• при этом устанавливают, что пороговое расстояние А въезда больше, чем пороговое расстояние В блокировки как минимум на 10 метров,
• пороговое расстояние В блокировки больше, чем пороговое расстояние С разблокировки как минимум на 10 метров.
| CN 110363998 A, 22.10.2019 | |||
| CN 105469596 B, 22.01.2019 | |||
| CN 112055331 A, 08.12.2020 | |||
| CN 104485007 A, 01.04.2015 | |||
| KR 1020110096221 A, 30.08.2011 | |||
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ РЕЖИМА РАБОТЫ СВЕТОФОРОВ НА ОСНОВЕ ИНФОРМАЦИИ, ПОЛУЧАЕМОЙ С НАВИГАЦИОННЫХ УСТРОЙСТВ | 2014 |
|
RU2580428C1 |
