Изобретение относится к области авиационной техники, а именно к беспилотным летательным аппаратам, и может быть использовано для дистанционного видео- и фото- зондирования водной поверхности, мониторинга морских и океанических техногенных и природных объектов, ретрансляции радио- и оптических сигналов, скрытного наблюдения и т.п.
Известен беспилотный летательный комплекс (RU 2232104, В64С 29/02, G01V 9/00,10.07.2004), содержащий дистанционно пилотируемый летательный аппарат с радиоуправляемой бортовой системой обеспечения полета летательного аппарата, бортовой приемопередающей аппаратурой и видеокамерой с передатчиком изображения, а также мобильный комплекс управления и обработки информации с наземной приемопередающей аппаратурой, приемником видеоизображений и радионавигационной системой управления летательным аппаратом. Радиоуправляемая бортовая система обеспечения полета летательного аппарата и радионавигационная система управления летательным аппаратом снабжены корректируемыми по глобальной навигационной системе инерциальными блоками с микромеханическими вибрационными гироскопами - акселерометрами, а сам дистанционно пилотируемый летательный аппарат выполнен в виде автономно пилотируемого летательного микроаппарата и размещен вместе с мобильным комплексом управления и обработки информации в общем, портативном контейнере. Автономно пилотируемый летательный микроаппарат для портативного комплекса авианаблюдений содержит фюзеляж, на котором размещены винтовой движитель, рулевое управление по курсу и тангажу, видеокамера с передатчиком видеоизображения, радиоуправляемая бортовая система обеспечения полета летательного аппарата и бортовая приемопередающая аппаратура. Кроме того, в него введена антенная система, закрепленная на фюзеляже, выполненным с приборным отсеком. В корпусе отсека установлены видеокамера с передатчиком видеоизображения, рулевые машинки, аккумуляторная батарея, приборы радиоуправляемой бортовой системы обеспечения полета летательного аппарата и бортовой приемопередающей аппаратуры. Винтовой движитель выполнен в виде, по меньшей мере, одного винтового блока с редуктором и электродвигателем, подключенным к общей аккумуляторной батарее.
Недостатком данного устройства является то, что для питания электродвигателя винтового движителя используется аккумуляторная батарея, поэтому продолжительность полета ограничена емкостью аккумуляторной батареи. Необходимость зарядки аккумуляторной батареи предполагает прекращение полета и приземления беспилотного летательного аппарата.
Известен беспилотный летательный аппарат (RU 2666493, В64С 27/08, В64С 39/02, 07.09.2018), выбранный в качестве прототипа содержит центральную платформу, на концах осей, вторые концы которых жестко закреплены на ней и ориентированы относительно ее центра, жестко закреплены электродвигатели с воздушными винтами с контролируемой частотой вращения, диаметрально расположенные двигатели имеют встречное направление вращения, электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой (полетным контроллером и контроллерами моторов), мобильным пультом управления и контроля, системой видеонаблюдения и приемником GPS навигации, на, по крайней мере, четырех осях, жестко соединенных с центральной платформой установлены, по крайней мере, восемь электродвигателей с соосными воздушными винтами и жестко закреплены внутри четырех одинаковых колец, внутренняя поверхность которых имеет аэродинамический профиль, которые в свою очередь жестко закреплены на осях, центральной платформе и между собой, внутренний диаметр колец определяется диаметром применяемых воздушных винтов с учетом относительного зазора, который в паре винт - кольцо составляет от 0,45% до 1,5% от внутреннего диаметра кольца в плоскости установки винта, габаритная высота кольца определена как 60% от его внутреннего диаметра, аэродинамический профиль, который обращен к хвостовой части винта, имеет максимальную относительную кривизну около 4%, а хорда профиля наклонена на угол -7° наружу от вертикальной оси винта, верхний винт сосной пары винтов расположен в самом узком сечении профиля кольца на расстоянии 40% высоты кольца от его носика, измеренной от его верхней точки, расстояние между соосными винтами выбирается из соотношения 0,6-1,6 от ширины лопасти винта в самой его широкой части.
Необходимость зарядки аккумуляторной батареи предполагает прекращение полета и приземления беспилотного летательного аппарата. Отмеченный факт, а именно, ограниченная длительность полета, характеризует основной недостаток прототипа.
Задача изобретения - увеличение продолжительности полета путем использования процесса преобразования энергии колебаний беспилотного летательного аппарата, имеющих место во время его полета, в электрическую энергию на борту беспилотного летательного аппарата.
Технический результат достигается тем, что в беспилотном летательном аппарате, содержащем центральную платформу, к боковой поверхности которой своими концами жестко прикреплены радиальные стержни, на других концах радиальных стержней жестко закреплены электродвигатели с воздушными винтами с контролируемой частотой вращения, диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой, состоящей из полетного контроллера и контроллеров моторов, системой видеонаблюдения и приемником GPS навигации, электродвигатели с воздушными винтами, которые жестко закреплены внутри одинаковых колец, внутренняя поверхность которых имеет аэродинамический профиль, которые в свою очередь жестко закреплены на радиальных стержнях, центральной платформе и между собой, к нижней поверхности центральной платформы жестко прикреплен герметичный отсек, в котором находится жидкий постоянный магнит, к нижней поверхности герметичного отсека жестко прикреплен статор, в пазах которого уложена электрическая обмотка, выводы которой соединены с силовыми входами зарядного устройства, жестко закрепленного на центральной платформе, и выходы которого соединены с выводами аккумуляторной батареи, к управляющим входам зарядного устройства своим первым выходом подключен датчик контроля уровня заряда аккумуляторной батареи, второй выход датчика контроля уровня заряда аккумуляторной батареи соединен с входом полетного контроллера.
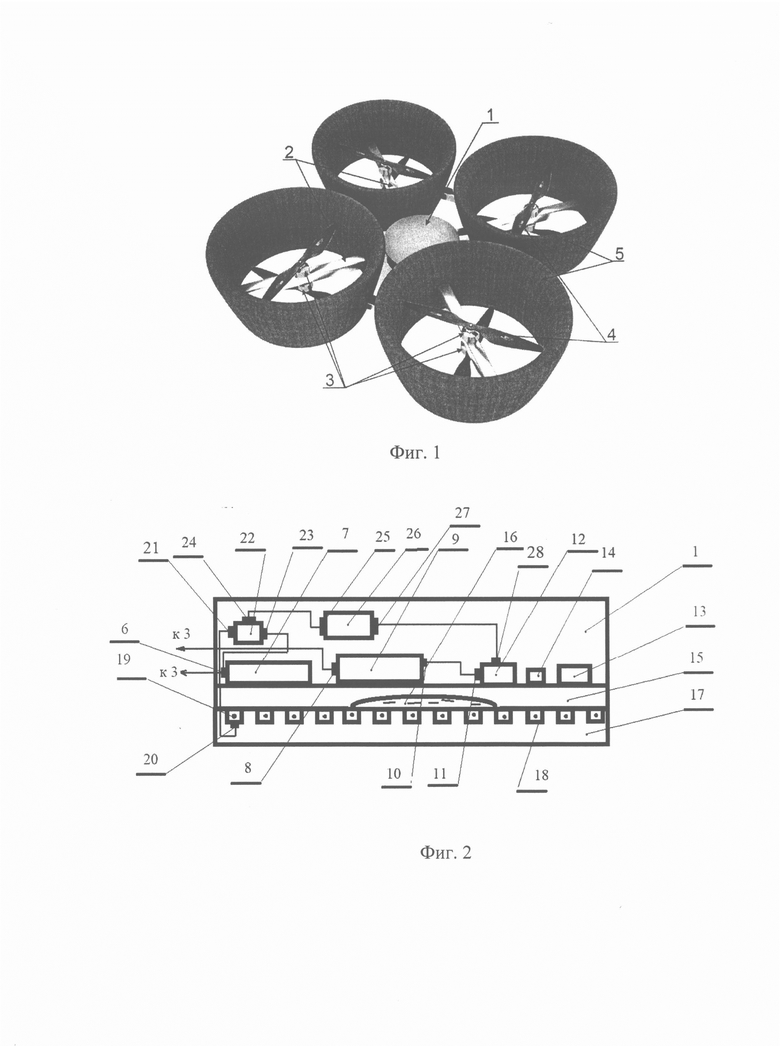
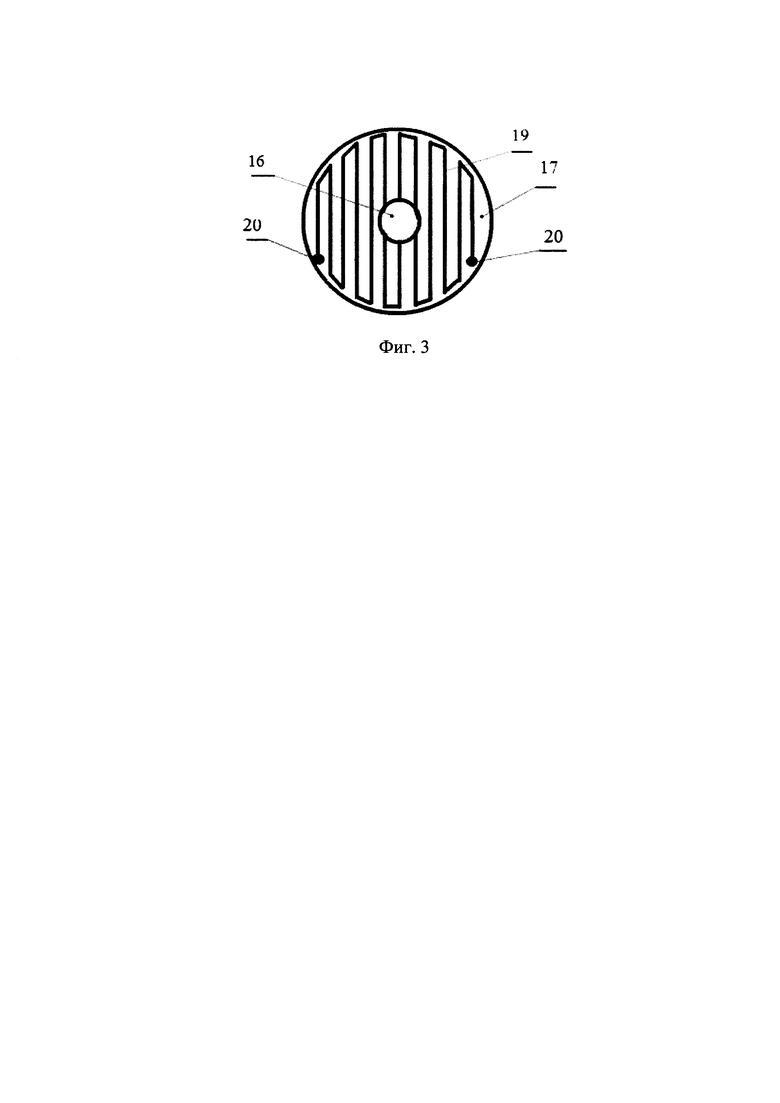
Беспилотный летательный аппарат поясняется чертежами, где на фиг. 1 показан общий вид беспилотного летательного аппарата, на фиг. 2 - вид сбоку центральной платформы, а на фиг. 3 приведена схема обмотки.
Беспилотный летательный аппарат содержит центральную платформу 1 (фиг. 1), к боковой поверхности которой своими концами жестко прикреплены радиальные стержни 2. На других концах радиальных стержней 2 жестко закреплены электродвигатели 3 с соосными воздушными винтами 4 с контролируемой частотой вращения. Диаметрально расположенные электродвигатели 3 имеют встречное направление вращения. Электродвигатели 3 жестко закреплены внутри четырех одинаковых профилированных колец 5, внутренняя поверхность которых имеет аэродинамический профиль, и которые в свою очередь жестко прикреплены к радиальным стержням 2 и к центральной платформе 1. Профилированные кольца 5 жестко закреплены между собой. Профильные кольца 5 изготовлены из карбона с объемной плотностью 1,5-1,6 г/см3 или алюминия и его сплавов с объемной плотностью 2,5-2,7 г/см3, магния и его сплавов с объемной плотностью 1,74-2,5 г/см3, бериллия и его сплавов с объемной плотностью 1,84-2,2 г/см3 или вспененных жестких полистиролов с объемной плотностью 0,2-0,4 г/см3.
Электродвигатели 3 соединены с выводами 6 (фиг. 2) аккумуляторной батареи 7 и с выводами 8 контроллеров 9 электродвигателей 3, например, Electronic Speed Controller, ESC или специализированные токовые регуляторы с программным обеспечением, обеспечивающим управление электродвигателями 3. Входы 10 контроллеров 9 соединены с выходами 11 полетного контроллера 12. На центральной платформе 1 жестко закреплены система видеонаблюдения 13 и приемник GPS навигации 14. К нижней поверхности центральной платформы 1 жестко прикреплен герметичный отсек 15, в котором находится жидкий постоянный магнит 16, например, из парамагнитных феррофлюидов (Liu X., Kent N., Ceballos A., Streubel R., Jiang Y., Chai Y., Kim P., Forth J., Hellman F., Russell T. Reconfigurable ferromagnetic liquid droplets // Science. 19 Jul 2019. Vol. 365. Issue 6450. P. 264-267. DOI: 10.1126/science.aaw8719). Следует отметить, что масса жидкого постоянного магнита 16 незначительна по сравнению с общей массой беспилотного летательного аппарата, поэтому возможность его передвижения не сказывается на центровке беспилотного летательного аппарата.
К нижней поверхности герметичного отсека 15 жестко прикреплен статор 17, выполненный из ферромагнитного материала, в пазах 18 которого уложена электрическая обмотка 19 (фиг. 3), выводы 20 (фиг. 1) которой соединены с силовыми входами 21 зарядного устройства 22, выходы 23 которого соединены с выводами 6 аккумуляторной батареи 7. К управляющим входам 24 зарядного устройства 22 своим первым выходом 25 подключен датчик контроля уровня заряда 26 аккумуляторной батареи 7. Второй выход 27 датчика контроля уровня заряда 26 аккумуляторной батареи 7 соединен с входом 28 полетного контроллера 12.
Беспилотный летательный аппарат работает следующим образом.
Аккумуляторная батарея 7 (фиг. 2) запитывает электродвигатели 3 (фиг. 1) и воздушные винты 4 приходят во вращение. Беспилотный летательный аппарат осуществляет взлет и дальнейший полет.
При понижении уровня заряда аккумуляторной батареи 7 ниже требуемого для нормального функционирования бортовых устройств, датчик контроля уровня заряда 26 аккумуляторной батареи 7 генерирует сигнал, поступающий на управляющий вход 24 зарядного устройства 22, под действием которого зарядное устройство 22 включается. Одновременно с этим со второго выхода 27 датчика контроля уровня заряда 26 аккумуляторной батареи 7 сигнал поступает на вход 28 полетного контроллера 12, который вырабатывает команду, поступающую на контроллеры 9 электродвигателей 3. В результате, беспилотный летательный аппарат начинает осуществлять движение по колебательной траектории, заложенной в программном обеспечении полетного контроллера 12, и жидкий постоянный магнит 16 (фиг. 3) также начинает двигаться в герметичном отсеке 15. Магнитное поле, созданное постоянным магнитом 16, начинает пересекать витки электрической обмотки 19 и индуцировать в них электродвижущую силу, под действием которой в цепи, состоящей из электрической обмотки 19 (фиг. 2), зарядного устройства 22 и аккумуляторной батареи 7, начинает протекать зарядный ток.
Как можно видеть, возможность заряда аккумуляторной батареи 7 за счет энергии колебательного движения беспилотного аппарата обусловливает увеличение продолжительности полета беспилотного летательного аппарата по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2801404C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2806131C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ КОМПЛЕКС | 2023 |
|
RU2810956C1 |
| Беспилотный летательный комплекс | 2024 |
|
RU2836414C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО | 2012 |
|
RU2518440C2 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Беспилотный летательный комплекс | 2023 |
|
RU2816399C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| Беспилотный летательный аппарат | 2017 |
|
RU2666493C1 |
| МАЛОГАБАРИТНАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2473455C2 |
Беспилотный летательный аппарат содержит центральную платформу, к боковой поверхности которой своими концами жестко прикреплены радиальные стержни, на концах которых жестко закреплены электродвигатели с соосными воздушными винтами с контролируемой частотой вращения, размещенные внутри одинаковых профилированных колец, при этом диаметрально расположенные электродвигатели имеют встречное направление вращения, а также содержит аккумуляторную батарею, маршрутную вычислительную систему, включающую полетный контроллер и контроллеры моторов, систему видеонаблюдения, приемник GPS навигации, герметичный отсек с жидким постоянным магнитом, закрепленный к нижней поверхности центральной платформы, статор из ферромагнитного материала, закрепленный к нижней поверхности герметичного отсека, и в пазах которого уложена электрическая обмотка, датчик контроля уровня заряда аккумуляторной батареи. Обеспечивается увеличение продолжительности полета беспилотного летательного аппарата за счет энергии колебательного движения беспилотного летательного аппарата. 3 ил.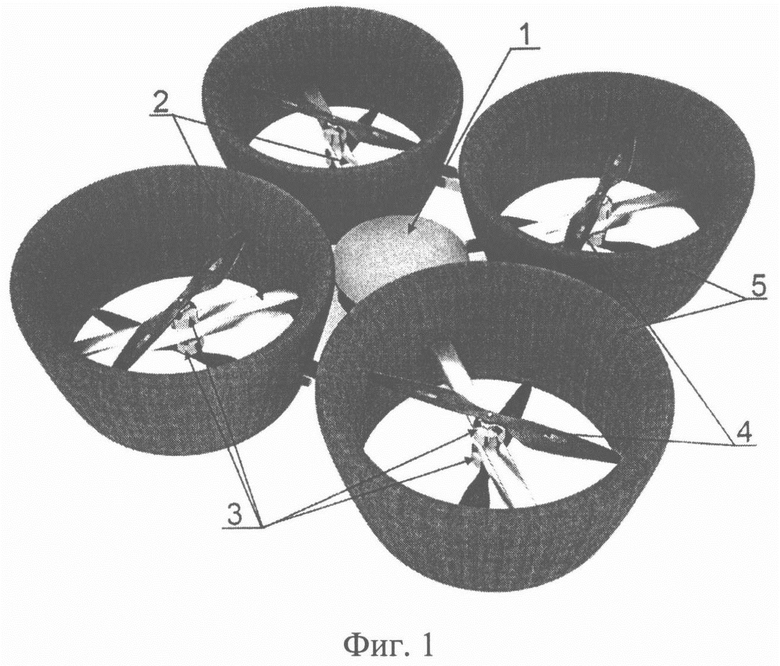
Беспилотный летательный аппарат, содержащий центральную платформу, к боковой поверхности которой своими концами жестко прикреплены радиальные стержни, на других концах радиальных стержней жестко закреплены электродвигатели с воздушными винтами с контролируемой частотой вращения, диаметрально расположенные электродвигатели имеют встречное направление вращения, электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой, состоящей из полетного контроллера и контроллеров моторов, системой видеонаблюдения и приемником GPS навигации, электродвигатели с воздушными винтами, которые жестко закреплены внутри одинаковых колец, внутренняя поверхность которых имеет аэродинамический профиль, которые в свою очередь жестко закреплены на радиальных стержнях, центральной платформе и между собой, отличающийся тем, что к нижней поверхности центральной платформы жестко прикреплен герметичный отсек, в котором находится жидкий постоянный магнит, к нижней поверхности герметичного отсека жестко прикреплен статор, в пазах которого уложена электрическая обмотка, выводы которой соединены с силовыми входами зарядного устройства, жестко закрепленного на центральной платформе, и выходы которого соединены с выводами аккумуляторной батареи, к управляющим входам зарядного устройства своим первым выходом подключен датчик контроля уровня заряда аккумуляторной батареи, второй выход датчика контроля уровня заряда аккумуляторной батареи соединен с входом полетного контроллера.
| НАКЛОННЫЙ ЖОЛОБ ДЛЯ СПУСКА ШЛАКА | 1932 |
|
SU42897A1 |
| Беспилотный летательный аппарат | 2016 |
|
RU2617320C1 |
| МАЯТНИКОВЫЙ МИКРОГЕНЕРАТОР | 2013 |
|
RU2538787C1 |
| CN 109098920 A, 28.12.2018 | |||
| CN 2917080 Y, 27.06.2007 | |||
| KR 1020180093190 A, 21.08.2018. | |||
