Изобретение относится к области авиационной техники, а именно к беспилотным летательным аппаратам (БЛА) и комплексам авианаблюдения, и может быть использовано для дистанционного видео- и фото- зондирования поверхности Земли, мониторинга техногенных и природных объектов, ретрансляции радио- и оптических сигналов, скрытного наблюдения и т.д.
В настоящее время промышленностью и любителями разрабатывается и выпускается большая номенклатура БЛА и, в частности, многороторных мультикоптеров различного назначения. Приоритет на рынке отдается моделям аппаратов, позволяющим обеспечить достаточные для решения задач применения грузоподъемность, продолжительность и безопасность полета. Предлагаемая конструкция БЛА поможет расширить номенклатуру выпускаемых многороторных мультикоптеров с улучшенными грузоподъемностью и продолжительностью полета при одинаковой затраченной энергии на осуществление полета.
Известен комплекс авианаблюдения /1. Комплекс авианаблюдения, патент РФ №2015067 от 30.06.1994 г./, содержащий БЛА с автономным электроприводом, передвижной контейнер и систему дистанционного управления. БЛА выполнены в виде вертикально взлетающих платформ с четырьмя жестко закрепленными двигателями с воздушными винтами и снабжены системой автоматической посадки.
Недостатком описанного выше комплекса авианаблюдения является недостаточная устойчивость аппарата в режиме «висения» и высокие массогабаритные показатели, определяющие низкие грузоподъемность и продолжительность полета.
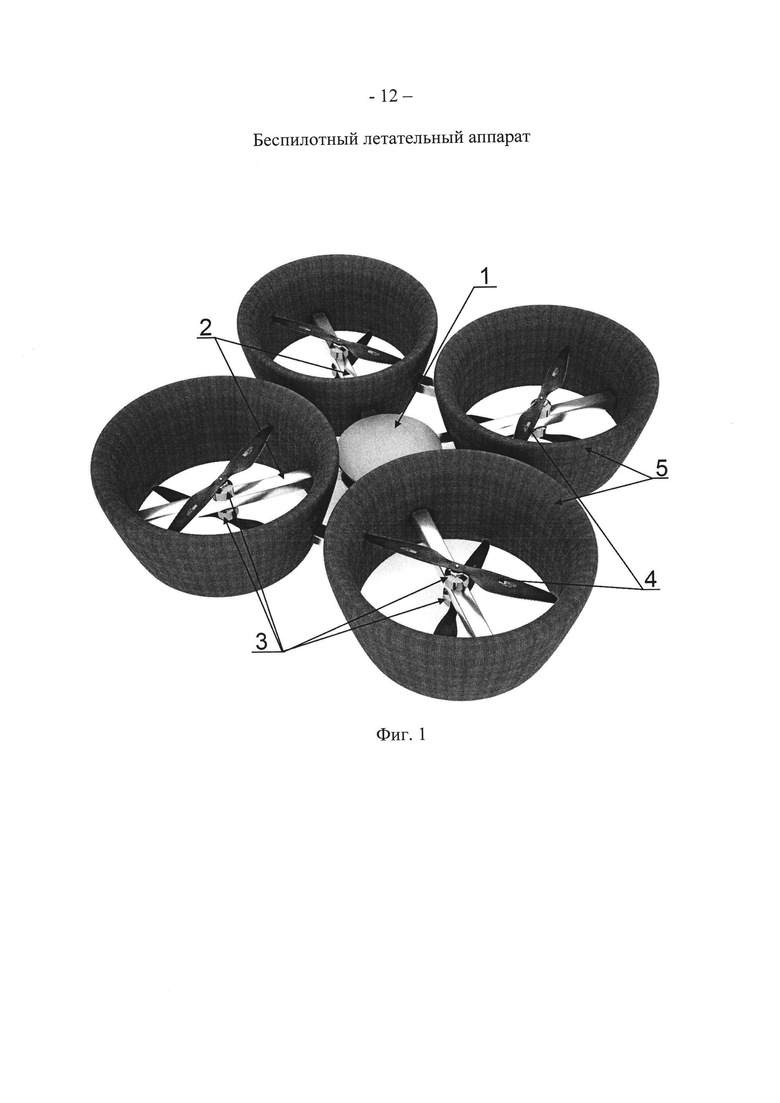
Наиболее близким по технической сущности к заявленному изобретению, является, принятый за прототип, беспилотный летательный аппарат (БЛА), включающий в себя центральную платформу (1), на концах осей (2), вторые концы которых жестко закреплены на ней и ориентированы относительно ее центра, жестко закреплены электродвигатели (3) с воздушными винтами (4) с контролируемой частотой вращения. Диаметрально расположенные двигатели имеют встречное направление вращения. Электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой, мобильным пультом управления и контроля, системой видеонаблюдения и приемником GPS навигации 12. Беспилотный летательный аппарат и комплекс авианаблюдения для него, патент РФ №2518440 от 232.04.2012 г./.
Недостатком данного устройства является то, что чисто механическое увеличение количества винтомоторных групп, требует пропорционального увеличения емкости аккумуляторных батарей, что приводит к пропорциональному увеличению их массы и в результате продолжительность и дальность полета могут в конечном результате и не увеличиться. Недостатком данного устройства является то, что повышение грузоподъемности приводит к уменьшению продолжительности полета, либо наоборот.
Задачей изобретения является использование в винтомоторных группах (ВМГ) БЛА специальных колец, внутренняя поверхность которых имеет аэродинамический профиль, в результате чего ВМГ преобразуется в винтокольцевой движитель (ВКД). /3. С.П. Остроухов. Аэродинамика воздушных винтов и винтокольцевых движителей. Москва. Физматлит. 2014/.
Техническим результатом, обеспечивающим решение указанной задачи, является повышение грузоподъемности БЛА при одинаковой затраченной
энергии на осуществление полета, а также увеличение продолжительности и дальности полета при одинаковой полезной нагрузке.
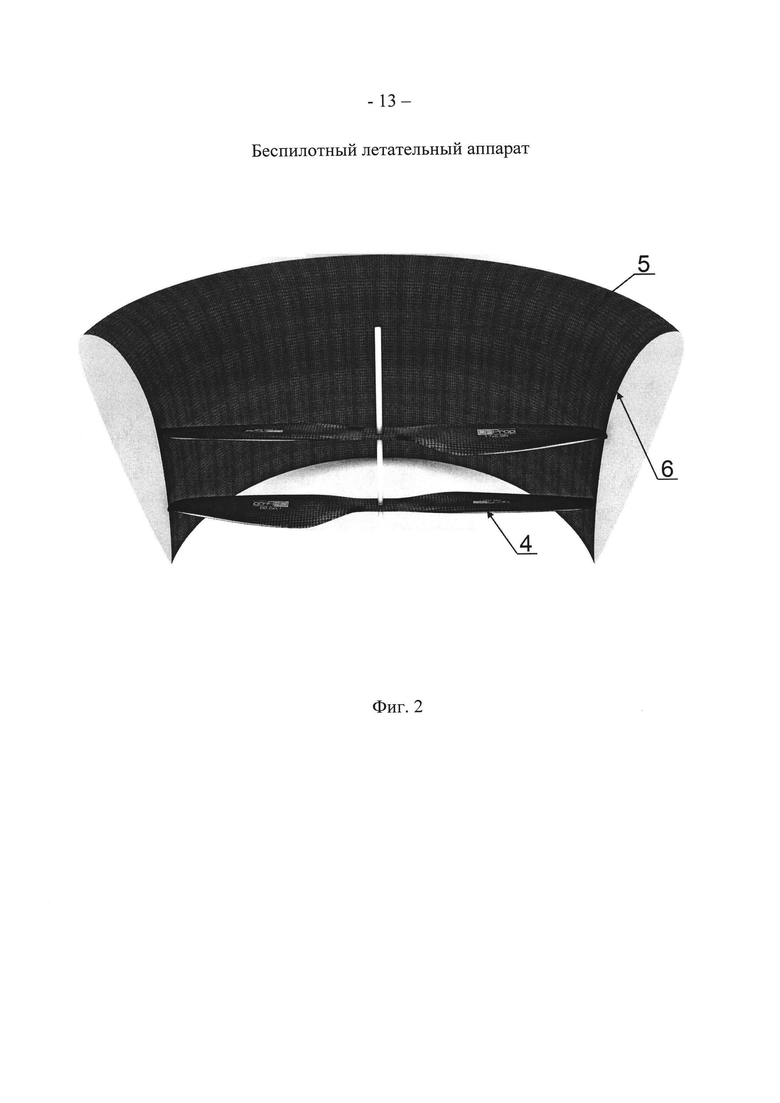
Указанная задача и достижение заявленного технического результата достигаются за счет того, что в известном устройстве - БЛА, включающем в себя центральную платформу (1), на концах осей (2), вторые концы которых жестко закреплены на ней и ориентированы относительно ее центра, жестко закреплены электродвигатели (3) с воздушными винтами (4) с контролируемой частотой вращения, диаметрально расположенные двигатели имеют встречное направление вращения, электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой (полетным контроллером и контроллерами моторов), мобильным пультом управления и контроля, системой видеонаблюдения и приемником GPS навигации, дополнительно вводятся, на, по крайней мере, четырех осях, жестко соединенных с центральной платформой, по крайней мере, восемь электродвигателей с соосными воздушными винтами, которые жестко закреплены внутри четырех одинаковых колец (5), внутренняя поверхность которых имеет аэродинамический профиль (6), которые в свою очередь жестко закреплены на осях, к центральной платформе и между собой, внутренний диаметр колец определяется диаметром применяемых воздушных винтов с учетом относительного зазора, который в паре винт-кольцо составляет от 0,45% до 1,5% от внутреннего диаметра кольца в плоскости установки винта, габаритная высота кольца определена как 60% от его внутреннего диаметра, специальный аэродинамический профиль, который обращен к хвостовой части винта, имеет максимальную относительную кривизну около 4%, а хорда профиля наклонена на угол -7° наружу от вертикальной оси винта, верхний винт сосной пары винтов расположен в самом узком сечении профиля кольца на расстоянии 40% высоты кольца от его носика, измеренной от его верхней точки, расстояние между соосными винтами выбирается из соотношения 0,6-1,6 от ширины лопасти винта в самой его широкой части.
Параметры кольца взяты из /3. С.П. Остроухое. Аэродинамика воздушных винтов и винтокольцевых движителей. Москва. Физматлит.2014/, где утверждается, что они близки к оптимальным. Там же взят профиль кольца (см. фиг. 2), который разработан П.П. Красильщиковым, его модель имеет наименование ВК-1, а профиль сечения кольца - РП. Фактические геометрические размеры и профиль кольца определяются размерами применяемых винтов.
Скорость потока в плоскости вращения винта и, следовательно, расход воздуха у такого движителя больше, а скорость отбрасывания меньше, чем при равных условиях у такого же винта без кольца. При этом часть неизбежных для обычных винтов потерь мощности, связанных с увеличением кинетической энергии отбрасываемой струи, в системе винт-кольцо используется для создания циркуляции скорости вокруг кольца и соответствующей дополнительной тяги, которая в зависимости от условий применения (в первую очередь, «висение» БЛА при нулевой поступательной скорости), аэродинамических характеристик винта и прикладываемой к нему мощности может достигать от 26% до 120% от тяги изолированного винта /3. С.П. Остроухое. Аэродинамика воздушных винтов и винтокольцевых движителей. Москва. Физматлит. 2014/.
Предложен БЛА (см. фиг. 1, 2), содержащий существенные признаки прототипа: центральную платформу (1), на концах осей (2), вторые концы которых жестко закреплены на ней и ориентированы относительно ее центра, жестко закреплены электродвигатели (3) с воздушными винтами (4) с контролируемой частотой вращения, рядом расположенные двигатели имеют встречное направление вращения, электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой (полетным контроллером и контроллерами моторов), мобильным пультом управления и контроля, системой видеонаблюдения и приемником GPS навигации (не показаны).
Сопоставительный анализ с прототипом показывает, что предложенный БЛА обладает другими существенными, отличительными от прототипа признаками, а именно, наличием новых элементов (см. фиг. 1, 2):
- как минимум, четырех колец (5), внутренняя поверхность которых имеет аэродинамический профиль (6), в центре которых жестко закреплены восемь (четыре) электродвигателей (3) с соосными (одиночными) воздушными винтами (4).
Декларируемый технический результат изобретения, повышение грузоподъемности БЛА при одинаковой затраченной мощности на осуществление полета, а также увеличение продолжительности и дальности полета при одинаковой затраченной энергии достигается за счет применения колец (5), внутренняя поверхность которых имеет аэродинамический профиль (6), в результате чего, винтомоторные группы (ВМГ) БЛА трансформируются в винтокольцевые движители (ВКД), которые обладают при одинаковой затраченной мощности дополнительной вертикальной тягой и обеспечивают БЛА другие, не достижимые ранее, технические характеристики.
В настоящем описании изобретения используются термины «винтомоторная группа (ВМГ» и «соосные винты». Их значение однозначно понятно при описании термина «винтомоторная группа» БЛА - это совокупность устройств, создающая тягу, под воздействием которой винтовой БЛА движется в требуемом направлении, и включающая мотор, воздушный винт, а так же все узлы и системы, необходимые для ее эффективной и безопасной работы /4. статьи «Винтомоторная установка», АВИАЦИЯ, Энциклопедия, М., Научное издательство «БРЭ», 1994 г./. А соосные винты - это два винта, расположенных непосредственно один за другим (или, один над другим) на соосных валах и вращающихся в противоположных направлениях. /5. Труды ЦАГИ им. проф. Н.Е. Жуковского №559 с.п., «Соосные воздушные винты», Издательство бюро новой техники НКАП, 1944 г./.
Ниже изобретение и сущность предлагаемого устройства - БЛА описаны более детально. На фиг. 1, 2 представлен предлагаемый БЛА, на фиг. 2 - схема ВКД с разрезом аэродинамического профиля кольца.
Чтобы определить, за счет чего можно достичь положительного результата в работе устройства, основным движущим элементом которой является воздушный винт, необходимо рассмотреть весь спектр потерь ему присущий /3. С.П. Остроухов. Аэродинамика воздушных винтов и винтокольцевых движителей. Москва. Физматлит. 2014/.
Потенциал повышения кпд винта заключается, в основном, в сокращении:
- профильных потерь самого винта;
- индуктивных окружных и осевых потерь в потоке за винтом;
- концевых потерь винта из-за срыва обтекания на концевых кромках на больших скоростях вращения.
Профильные потери можно уменьшить, применив в сечениях лопасти винта более совершенные в аэродинамическом смысле профили.
Окружные индуктивные потери можно уменьшить, используя схему соосного вращения пропеллеров (СВП).
А для снижения осевых индуктивных потерь необходимо создать такие условия, при которых движитель (например, при заданной тяге) отбрасывает большую массу воздуха с меньшей скоростью. В определенных пределах это можно сделать, увеличив диаметр винта, но при этом возникают трудности с его компоновкой на БЛА и возрастании веса.
Предлагается использование на малоскоростных аппаратах комбинации воздушного винта и специального кольца, обращенного аэродинамическим профилем внутрь - винтокольцевого движителя (ВКД) (см. фиг. 1).
Основное преимущество ВКД перед изолированным («голым», без кольца) винтом состоит в значительном увеличении тяги при одной и той же затраченной мощности. При обтекании ВКД на внутренней поверхности носовой части профилированного кольца возникает значительная по величине подсасывающая сила, проекция которой на направление, перпендикулярное плоскости вращения винта, обеспечивает положительную тягу кольца. Кроме того, присутствие кольца, как естественного ограждения, приводит к снижению и концевых потерь винта.
Таким образом, ВКД обладают значительными аэродинамическими и компоновочными достоинствами, что позволяет рассматривать их использование в низкоскоростных аппаратах с небольшой нагруженностью мощностью (в том числе, в мультикоптерах), в том числе для их аэродинамической разгрузки, когда выигрыш в тяге от применения кольца сравнительно невелик (до 26-30%). Так в аэродинамической схеме аппарата кольцо может выполнять роль оперения или служить конструктивно-опорным элементом. Ограждая винт, кольцо защищает его от поломок при ударах и обеспечивает большую безопасность при обслуживании. Что касается проблемы дополнительного веса из-за наличия кольца, то она решается использованием в его конструкции легких композитных (карбон, объемная плотность 1,5-1,6 г/см3) или конструкционных (алюминий и его сплавы, 2,5-2,7 г/см3, магний и его сплавы 1,74-2,5 г/см3, бериллий и его сплавы 1,84-2,2 г/см3) материалов, вспененных жестких полистиролов (0,2-0,4 г/см3) и даже дерева (например, бальзы, 0,12-0,2 г/см3) /6. Н.И. Карякин и др., Краткий справочник по физике, изд. «Высшая школа», Москва - 1964/.
Предлагаемый БЛА содержит центральную платформу (1), на концах, по крайней мере, четырех осей (2), жестко соединенных с центральной платформой установлены, по крайней мере, восемь электродвигателей (3) с соосными воздушными винтами (4) и жестко закреплены внутри четырех одинаковых профилированных колец (5), внутренняя поверхность которых имеет аэродинамический профиль (6), которые в свою очередь жестко закреплены на осях, к центральной платформе и между собой, внутренний диаметр колец определяется диаметром применяемых воздушных винтов с учетом
относительного зазора, который в паре винт-кольцо составляет от 0,45% до 1,5% от внутреннего диаметра кольца в плоскости установки винта, габаритная высота кольца определена как 60% от его внутреннего диаметра, специальный аэродинамический профиль, который обращен к хвостовой части винта, имеет максимальную относительную кривизну около 4%, а хорда профиля наклонена на угол -7° наружу от вертикальной оси винта, верхний винт сосной пары винтов (одиночный винт) расположен в самом узком сечении профиля кольца на расстоянии 40% высоты кольца от его носика, измеренной от его верхней точки, расстояние между соосными винтами выбирается из соотношения 0,6-1,6 от ширины лопасти винта в самой его широкой части.
Предлагаемый БЛА летает и управляется точно так же как любой современный многороторный мультикоптер - по четырем основным каналам: курсу, крену, тангажу и рысканию. Сигналы на вращение двигателей поступают из полетного контроллера на каждый из индивидуальных регуляторов оборотов (Electronic Speed Controller, ESC), специализированный токовый регулятор со специальной прошивкой (программным обеспечением), обеспечивающий управление бесколлекторным трехфазным двигателем. Причин, указывающих на то, что установка колец, внутренняя поверхность которых имеет аэродинамический профиль, усложнит управление аппаратом, нет.
Таким образом, применение предлагаемого БЛА позволит повысить грузоподъемность, продолжительность и дальность полета при одинаковой затраченной энергии на его осуществление.
Для реализации предлагаемого технического решения может быть использовано стандартное оборудование, используемое в настоящее время для производства стандартных шасси БЛА. Потребуется дополнительно организовать производство профилированных колец или в виде полой оболочки из тонкостенного карбона, или, например, объемных, сформованных из жесткого вспененного полистирола марки ПС-1 в полой матрице.
Отличительные признаки заявляемого устройства - БЛА - обеспечивают появление новых свойств, не достигаемых в прототипе и аналогах. Проведенный сопоставительный анализ известных технических решений (аналогов) и уровня техники в исследуемой и смежных предметных областях позволил установить: аналоги с совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного изобретения условию «новизны».
Результаты поиска известных решений в области БЛА и комплексам авианаблюдения для них (МКИ: кл. В64С 39/00) с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого устройства, показали, что они не следуют явным образом из уровня техники. Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения действий на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Изобретение является «промышленно приемлемым», поскольку совокупность характеризующих его признаков обеспечивает возможность его осуществления, работоспособность и воспроизводимость при мелкосерийном производстве, так как для реализации заявленного устройства может быть использовано стандартное промышленное оборудование и предполагаемое изобретение может быть внедрено в существующих системах наблюдения и позиционирования с применением БЛА и комплексов авианаблюдения для них.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат | 2023 |
|
RU2806131C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2801404C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| Мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами | 2023 |
|
RU2831361C1 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2795885C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711633C2 |
Изобретение относится к области авиационной техники, а именно к беспилотным летательным аппаратам (БЛА). БЛА содержит центральную платформу, на концах осей, вторые концы которых жестко закреплены на ней и ориентированы относительно ее центра, жестко закреплены, по крайней мере, восемь электродвигателей с соосными воздушными винтами с контролируемой частотой вращения. Рядом расположенные двигатели имеют встречное направление вращения, электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой - полетным контроллером и контроллерами моторов, мобильным пультом управления и контроля, системой видеонаблюдения и приемником GРS навигации. Кроме того, электродвигатели с винтами установлены внутри колец, аэродинамический профиль которых обращен к концевым частям винтов, которые вращаются в кольце с относительным зазором 0,45-1,5% от диаметра кольца. Обеспечивается повышение грузоподъемности БЛА при одинаковой затраченной мощности на осуществление полета, а также увеличение продолжительности и дальности полета при одинаковой затраченной энергии. 2 ил.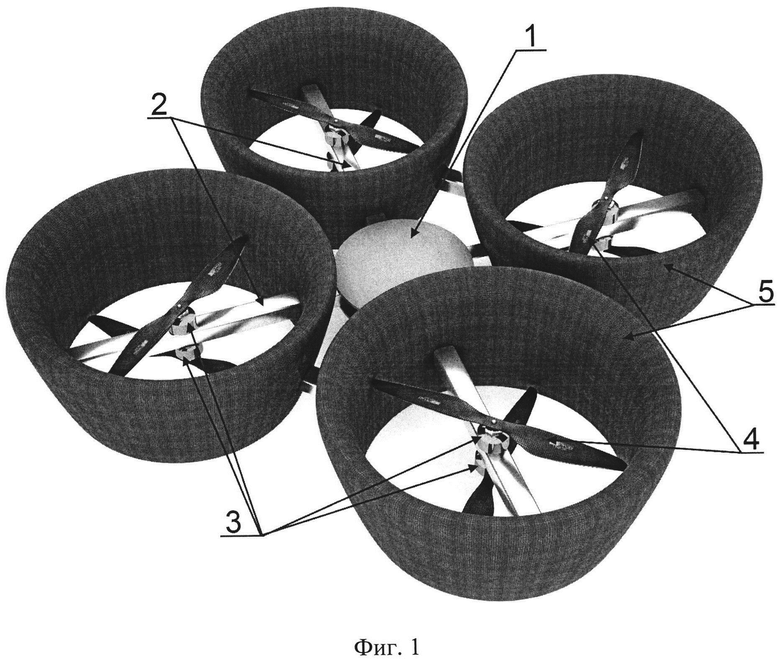
Беспилотный летательный аппарат, включающий в себя центральную платформу, на концах осей, вторые концы которых жестко закреплены на ней и ориентированы относительно ее центра, жестко закреплены электродвигатели с воздушными винтами с контролируемой частотой вращения, диаметрально расположенные двигатели имеют встречное направление вращения, электродвигатели связаны с аккумуляторной батареей и маршрутной вычислительной системой (полетным контроллером и контроллерами моторов), мобильным пультом управления и контроля, системой видеонаблюдения и приемником GPS навигации, отличающийся тем, что на, по крайней мере, четырех осях, жестко соединенных с центральной платформой установлены, по крайней мере, восемь электродвигателей с соосными воздушными винтами и жестко закреплены внутри четырех одинаковых колец, внутренняя поверхность которых имеет аэродинамический профиль, которые в свою очередь жестко закреплены на осях, центральной платформе и между собой, внутренний диаметр колец определяется диаметром применяемых воздушных винтов с учетом относительного зазора, который в паре винт - кольцо составляет от 0,45% до 1,5% от внутреннего диаметра кольца в плоскости установки винта, габаритная высота кольца определена как 60% от его внутреннего диаметра, аэродинамический профиль, который обращен к хвостовой части винта, имеет максимальную относительную кривизну около 4%, а хорда профиля наклонена на угол -7° наружу от вертикальной оси винта, верхний винт сосной пары винтов расположен в самом узком сечении профиля кольца на расстоянии 40% высоты кольца от его носика, измеренной от его верхней точки, расстояние между соосными винтами выбирается из соотношения 0,6-1,6 от ширины лопасти винта в самой его широкой части.
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| АНАЛИЗАТОР ДЛЯ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ СОЛЕЙ В НЕФТИ | 0 |
|
SU163412A1 |
| С.П.Остроухов "Аэродинамика воздушных винтов и винтокольцевых движителей", Москва, изд | |||
| "Физматлит", 2014, сс.23-25, рис.1.2 (глава 1.1), сс.33-35, табл.1.1 (глава 1.3), сс.73-74,78 (глава 2.1) | |||
| Самоходный полноповоротный кран | 1955 |
|
SU108016A1 |
| WO 2015103700 A1, 16.07.2015 | |||
| WO 2014195660 A1, 11.12.2014. | |||

