Настоящее изобретение относится к области РАДИОЭЛЕКТРОНИКИ, а именно, к способам обработки и обнаружения сигнала на фоне помех. Задача, на решение которой направлено заявленное изобретение заключается в реализации разработки оптимального метода обнаружения гидроакустического сигнала в условиях помех, описываемых нелинейными стохастическими уравнениями. Поставленная задача решается за счет того, что в заявленном способе нелинейная функция представляется через кусочно-постоянные функции, что дает возможность реализовать фильтр Калмана-Бьюси на интервалах аппроксимации, а в целом построить фильтр Калмана-Бьюси с переменной структурой.
УРОВЕНЬ ТЕХНИКИ - характеризуется наличием ряда аналогов наиболее близкими можно определить следующие:
- Метод кусочного разложения оценок [1];
- Метод условной марковской фильтрации [2];
- Способ сплайн-фильтрации сигналов [3];
На сегодняшний день приближенные решения уравнений фильтрации основаны на аппроксимации решения - апостериорной плотности вероятности некоторой функцией из параметризованного класса, при этом используют нормальную плотность вероятности [4]. Однако в ряде случаев апостериорная плотность вероятности существенно отличается от нормальной (к примеру, процесс ближней реверберации) и при возникновении больших ошибок фильтрации (малое отношение сигнал-шум, помеха-шум) требуются более точные приближения. С этой точки зрения особенно привлекательными являются аппроксимации, которые позволяют использовать только линейные представления.
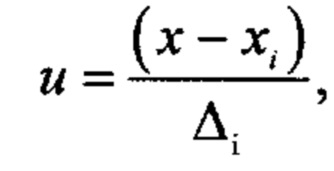
Из предшествующих методик известен метод условной марковской фильтрации (аналог) [2] с. 213-222, в котором взаимосвязь сигнала и помехи выражается некоторой детерминированной функцией, а белый шум - аддитивен. Основная задача метода состоит в том, чтобы, располагая одним из компонентов многомерного марковского процесса, вычислить распределение вероятностей для значений наблюдаемого компонента, где сигнал является произвольной детерминированной функцией по времени S(x, t) = S(t), а помеха V(η, t) = η(t) представляется диффузионным гауссовским процессом. Схема, реализующая указанный метод условной марковской фильтрации, приведена на фиг. 1, где:
блок 14 - блок усиления на коэффициент 
блок 7 - блок усиления на коэффициент 
блоки 8, 12, 26 - интеграторы;
блок 10 - блок усиления на коэффициент 
блоки 9, 13, 21 - квадраторы;
блоки 6, 9, 16 - блоки усиления на коэффициент [-1];
блоки 10, 13 - блоки усиления на коэффициент [2];
блоки 17, 20 - перемножители;
блок 18 - блок формирования опорного сигнала;
блок 25 - блок усиления на коэффициент 
блок 27 - двухпороговое устройство;
блок 28 - однопороговое устройство;
блоки 29 - блоки принятия решения при гипотезе наличия сигнала;
блок 30 - блок принятия решения при гипотезе отсутствия сигнала;
блок 31 - блок, реализующий продолжение наблюдения.
Суть работы метода условной марковской фильтрации можно выразить в системе уравнений:
где: s(t) - детерминированный сигнал; u(t) - поступающая входная реализация; z(t) - логарифм отношения правдоподобия;  - оценка реверберационной помехи при гипотезе наличия сигнала;
- оценка реверберационной помехи при гипотезе наличия сигнала;  - оценка реверберационной помехи при гипотезе отсутствия сигнала; σ*2 - дисперсия оценки помехи; N0 - величина спектральной плотности белого шума; γ - коэффициент диффузии.
- оценка реверберационной помехи при гипотезе отсутствия сигнала; σ*2 - дисперсия оценки помехи; N0 - величина спектральной плотности белого шума; γ - коэффициент диффузии.
Принцип действия метода заключается в следующем: при гипотезах наличия и отсутствия сигнала вычисляются оценочные значения отфильтрованной от белого шума помехи, на их основе формируют логарифм отношения правдоподобия и затем выносят решение в одной из двух пороговых схем. Метод условной марковской фильтрации позволяет получить структурные схемы оптимальных приемников для различных помеховых ситуаций, но не производит оценку помехоустойчивости таких приемников.
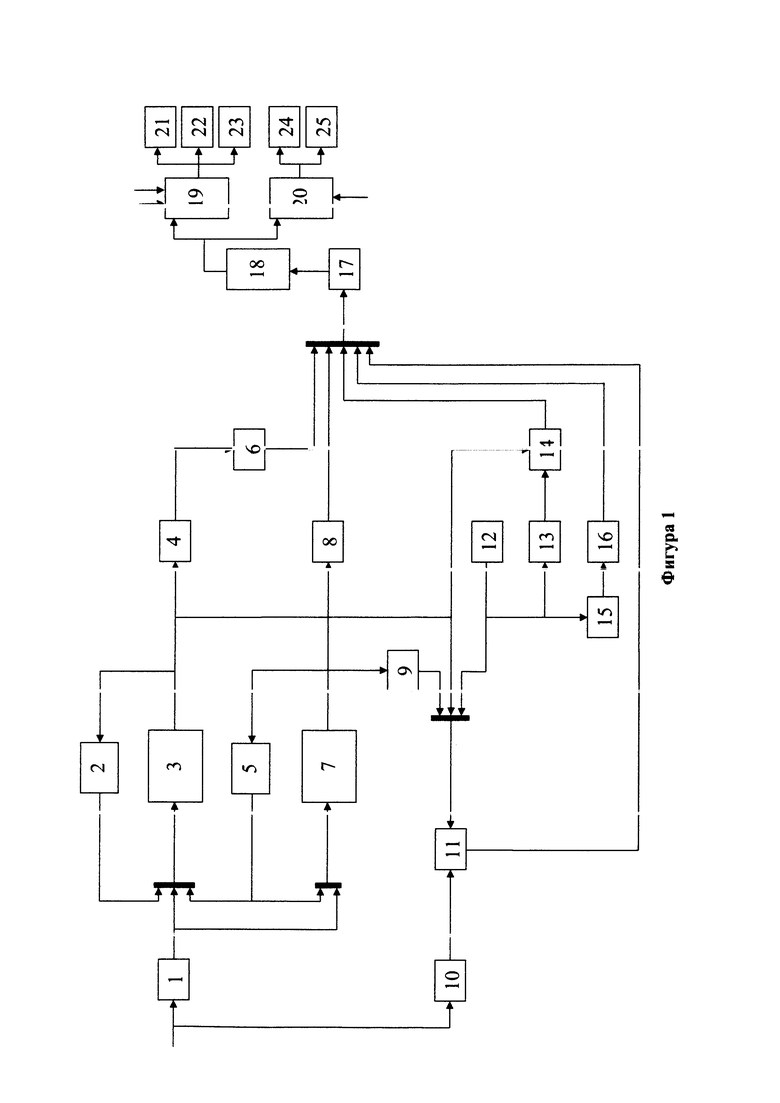
Существует способ сплайн-фильтрации сигналов (патент №2651640) основывается на методе условной марковской фильтрации, который включает в себя: решение уравнений фильтрации для гипотезы наличия/отсутствия сигнала; уравнения правдоподобия; уравнения для вычисления коэффициентов усиления (прототип) [3]. Отличительной особенностью способа сплайн-фильтрации является то, что для получения оценок помехи, которая не является гауссовской и описывается стохастическим дифференциальным уравнением состояния, дополнительно используется сплайн-интерполяция нелинейной функции. Область динамического диапазона изменений нелинейной функции разбивается на интервалы, в каждом из которых реализуется линейное представление уравнения состояния, что позволяет на каждом из поддиапазонов реализовать фильтр Калмана-Бьюси, включающего в себя: два уравнения оценки состояния при гипотезах наличия/отсутствия сигнала; уравнения оценки дисперсии на различных интервалах и уравнения правдоподобия, включающего эти оценки, и по результатам вычисления которого выносится решение об обнаружении или не обнаружении сигнала [5], [6]. Аппроксимация проводится по узловым точкам, т.е. в точках где значение нелинейной функции и ее аппроксиманта кусочно-линейной функции совпадают. Способ сплайн фильтрации представлен на фигуре 2 где:
блок 1 - блок определения узловых точек на интервале;
блок 2 - блок формирования системы интервалов;
блок 3 - блок сравнения оценки помехи с системой интервалов;
блок 4 - блок определения значения оценки помехи [х*(1)];
блок 5 - блок определения величины коэффициента [ai];
блок 6 - блок определения величины коэффициента [bi];
блок 7 - блок усиления на коэффициент 
блоки 8,12, 26 - интеграторы;
блоки 9, 13, 21 - квадраторы;
блок 10 - блок усиления на коэффициент 
блоки 11, 15, 22 - блоки усиления на коэффициент [-1];
блок 14 - блок усиления на коэффициент 
блоки 16, 19 - блоки усиления на коэффициент [2];
блоки 17, 20 - перемножители;
блок 18 - блок формирования опорного сигнала;
блок 25 - блок усиления на коэффициент 
блок 27 - двухпороговое устройство;
блок 28 - однопороговое устройство;
блоки 29, 32 - блоки принятия решения при гипотезе наличия сигнала;
блок 30, 33 - блок принятия решения при гипотезе отсутствия сигнала;
блок 31 - блок, реализующий продолжение наблюдения.
блок 23 - блок вычисления значения следующей оценки помехи [x*(2)];
блок 24 - блок вычисления значения следующей оценки помехи [х*(3)];
Повышение точности аппроксимации сплайн-функциями достигается за счёт снижения ошибки оценивания наблюдаемого процесса на этапе его представления линейным сплайном на каждом интервале линеаризации. Когда оцениваемый процесс описывается стохастической динамической системой вида:

и ограничениях вида:

где: f(.), h(.) - нелинейные функции ∈L2
Тогда представление НДС (1) может быть аппроксимировано системой дифференциальных уравнений вида:
Соответствующее уравнение фильтрации обнаружения будет иметь вид:
Тогда исходя из того, что в каждом интервале фильтр является линейным фильтром Калмана-Бьюси и удовлетворяет условиям устойчивости [7], а ошибки в целом и локально, меньше пороговых, то из этого следует, что сплайн-аппроксимация является устойчивой.
Принцип функционирования метода заключается в следующем: при гипотезах наличия и отсутствия сигнала вычисляются оценочные значения отфильтрованной от белого шума помехи, на их основе формируют логарифм отношения правдоподобия и затем выносят решение в одной из двух пороговых схем. Метод условной марковской фильтрации позволяет получить структурные схемы оптимальных приемников для различных помеховых ситуаций, но не производит оценку помехоустойчивости таких приемников.
При переходе от аппроксимаций многочленами к аппроксимации сплайнами преследуют две цели. Первая, это улучшение качества приближения: при одинаковых вычислительных затратах абсолютные погрешности аппроксимации сплайнами меньше, чем абсолютные погрешности аппроксимации многочленами, а при одинаковых погрешностях уменьшается объем вычислений. Сплайны позволяют избежать осцилляции [5] [6] [8]. Для сходимости аппроксимации к аппроксимируемой функции предъявляются более слабые требования, чем в случае многочленов. Например, интерполяция сплайнами невысоких степеней сходится даже для непрерывных функций. Вторая цель - резкое уменьшение вычислительных трудностей как при построении алгоритмов решения задач, так и при дальнейшей работе с аппроксимантами, которые на каждом звене представляют собой многочлены невысоких степеней или иные элементарные функции [5] [6].
Асимптотически наилучшее равномерное приближение сплайном первой степени S1(x) функции f(x) определяется выражением [7]:

 Δi=xi+1-xi, xi≤х<xi+1, Δ-1=Δn=0.
Δi=xi+1-xi, xi≤х<xi+1, Δ-1=Δn=0.
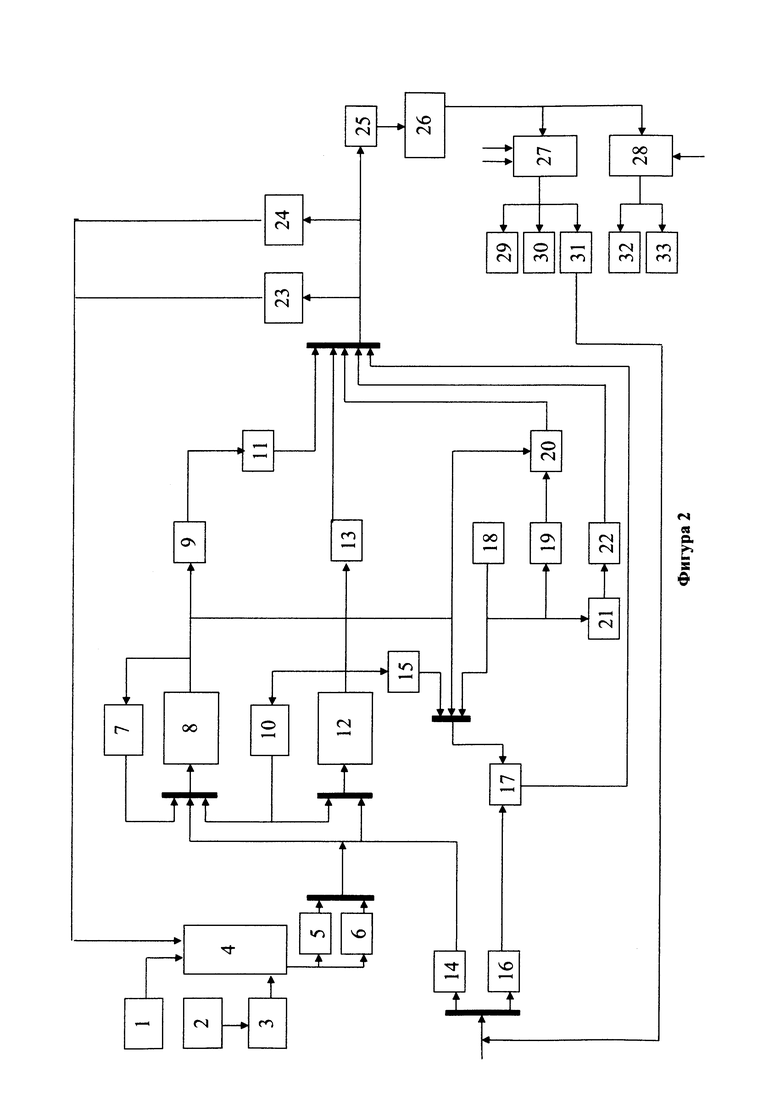
где: xi, xi+1 - узловые точки на интервале; Δi - интервал с номером секции i. Сплайновое представление тестового сигнала, показано на фигуре 3, где:
x1, х2, х3 - узловые точки на интервале;
Δ1, Δ2, Δ3 - интервалы;
r(х) - тестовый сигнал, у которого коэффициент сноса равен r(x)=-0,5x2-х;
s(x) - сплайновое представление сигнала r(х).
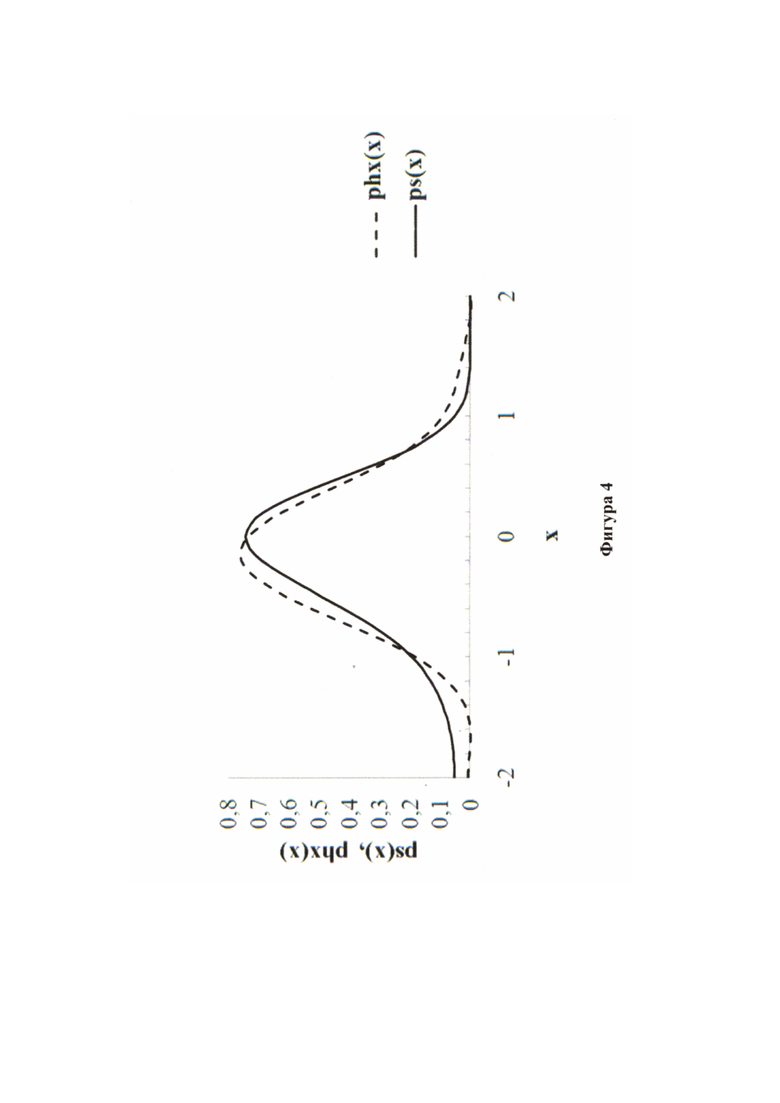
В рамках данного изобретения для удовлетворения требования непрерывности плотности вероятности, применялась операция сглаживания высокочастотных составляющих характеристической функции, путем замены высокочастотных отсчетов нулями. Спектральные плотности вероятности тестового процесса ps(x) и его приближение сплайнами представлено на фигуре 4, где:
х - значения тестового процесса;
ps(x) - плотность вероятности тестового процесса;
phx(x) - плотность вероятности приближения тестового процесса сплайнами.
Обе кривые (фигура 4) имеют схожую форму нормального распределения, с положительными коэффициентами асимметрии: для плотности вероятности тестового сигнала он равен 0,77 а для плотности вероятности приближения тестового процесса сплайнами - 0,75, также оба распределения имеют только по одному возможному значению, соответствующему наибольшей вероятности появления, и являются одномодальными.
Аппроксимировать исходную функцию можно различными способами, но для решения задачи линейной фильтрации выражение (3) на интервалах [xi, xi+1) рассматривается как линейное стохастическое уравнение. Вследствие этого, алгоритм фильтрации на интервале можно представить как фильтр Калмана, с параметрами, меняющимися в зависимости от номера секции, к которой принадлежит текущая оценка процесса. Известно, что в задачах линейной фильтрации нет необходимости вычислять плотность вероятности, достаточно найти оценку математического ожидания процесса в каждой точке и дисперсию этой оценки [8] [9] [10]. Таким образом, можно записать уравнение фильтрации случайного процесса х(t)∈Δi:
где: х* - текущая оценка процесса; h - функция прямоугольного окна; ai, bi - коэффициенты, значения которых определяются через узловые точки xi и значения функции f(xi) через систему уравнений:
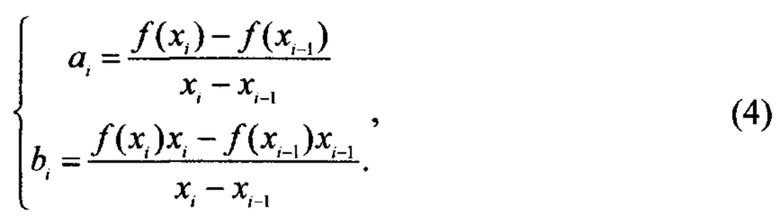
Если рассматривать весь интервал изменения х∈Х, то дисперсия фильтрации случайного процесса х(t) будет представляться вектором  при котором имеет место соответствие:
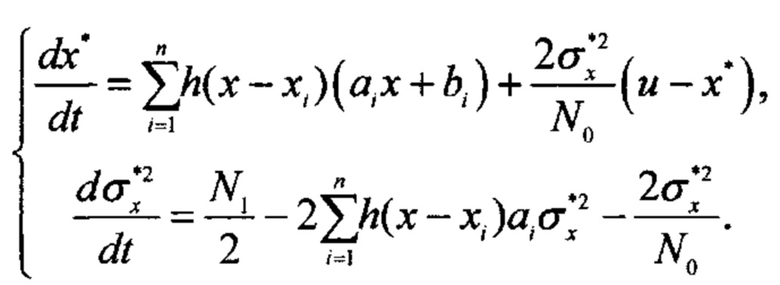
при котором имеет место соответствие:  тогда система уравнений фильтрации представляется уравнениями:
тогда система уравнений фильтрации представляется уравнениями:
Метод сплайн-фильтрации позволяет оценивать случайные процессы, заданные не только скалярным, но и матрично-векторным уравнением. Преимущества предлагаемого подхода в вычислительном отношении, по сравнению с известными методами нелинейной фильтрации, более существенны. В случае, решения задачи обнаружения сигнала на фоне помехи и белого шума уравнения обнаружения и фильтрации имеют вид [9] [10]:
Уравнение оценивания состояния ДС в матричном виде можно записать в виде:
где: A - диагональная матрица (m×m);
B, z - вектор - столбцы - (m×1);
K - матричный коэффициент усиления (m×m);
R - корреляционная матрица ошибок фильтрации (m×m).
Для задачи фильтрация-обнаружение сигналов ДС соответствует нелинейному стохастическому уравнению, которое описывает помеху х, а уравнение наблюдения имеет вид [11], [12]:
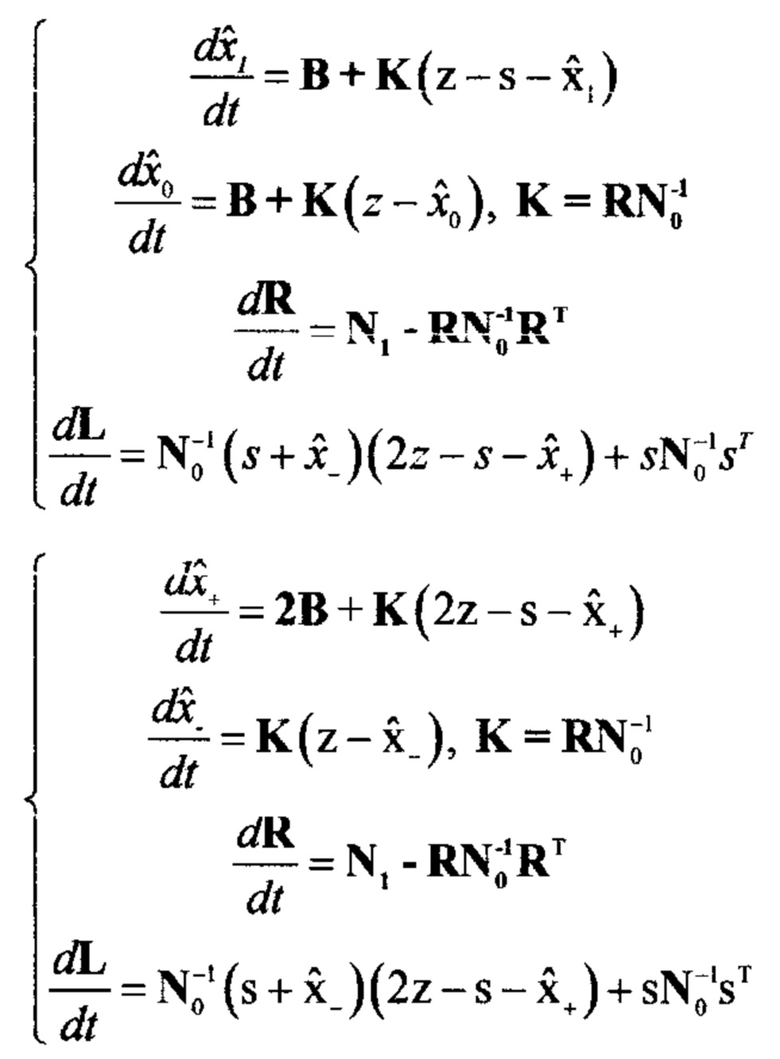
Система уравнений, моделирующих обработку сигнала, при условии нелинейности уравнения состояния и аппроксимации нелинейности линейными сплайнами, может быть записана следующим образом:
где:  - оценка помехи, соответственно при наличии сигнала и его отсутствии; L - отношение правдоподобия.
- оценка помехи, соответственно при наличии сигнала и его отсутствии; L - отношение правдоподобия.
К недостаткам указанным способов можно отнести следующее:
- необходимость выполнения сложных математических вычислений связанных с размерностью матриц в уравнениях состояния и наблюдения, обуславливающие наличие дополнительных вычислительных блоков в реализуемом алгоритме.
- наличие ошибок и снижение точности фильтрации сигналов при импульсных, взрывоподобных реализациях
- основной недостаток связан с быстрым ростом вычислительных затрат при увеличении размерности матриц, на практике это связано с обработкой реализации (сигнал, шум) на каждом элементе антенны.
Указанные недостатки устраняются тем, что предлагается использовать метод фильтрации-обнаружения, основанный на аппроксимации стохастического уравнения помехи кусочно-постоянными функциями (композиция В-сплайнов нулевого порядка, кусочно-линейная функция). Такой подход позволяет избавиться от матричных выражений.
Достигаемый технический результат заключается в уменьшении вычислительных затрат, обеспечении высокой эффективности обнаружения и в универсальности обработки при различных помехах в реальном масштабе времени. Возможность работы в реальном масштабе времени, получение более эффективного алгоритма фильтрации, требующего меньше вычислительных затрат, обуславливают высокую экономическую выгоду, которая может быть использована при внедрении в систему обработки гидроакустических сигналов.
Как было показано в работах [9] [10] [13] [14] [15] [16] алгоритм линейной фильтрации на интервале можно представить как фильтр Калмана с параметрами, меняющимися в зависимости от номера секции, к которой принадлежит текущая оценка процесса. Известно, что в задачах линейной фильтрации нет необходимости вычислять плотность вероятности, достаточно найти оценку математического ожидания процесса в каждой точке и дисперсию этой оценки [9] [10] [13] [14] [15] [16].
Рассмотрим суть предлагаемого способа Предположим, что задана стохастическая динамическая система (ДС) уравнений вида:
n0(t) и n1(t) - белые гауссовские шумы математическое ожидание и корреляционные функции которых, определяются выражениями:
n1(t)=n0(t)=0, n0(t)n0(t-τ)N0δ(τ).
n1(t)n1(t-τ)=N1δ(τ).
Первое уравнение описывает динамику состояния, а второе является уравнением наблюдения процесса.
Аппроксимируем функцию входящую f(.), входящую в уравнение состояния, на интервалах [xi, xi+1] кусочно-линейной функцией, определяющей сплайн первой степени S1 класса С [2] [5]:

где: n - число интервалов аппроксимации.
Введём функции прямоугольного окна h(.), которую определим следующим образом.

С учетом последнего, стохастическая ДС (1), у которого коэффициент сноса f(x) аппроксимирован кусочно-линейными функциями, имеет вид:

Уравнение (4) определяет марковский процесс, статистические характеристики которого полностью определяются двумя одномерными распределениями: начальной и переходной плотностями вероятности. Аналитическое выражение для них можно найти, решая соответствующее уравнение Фоккера-Планка-Колмогорова [2] [4] [16]

При начальных условиях p=δ(x-x1) решением уравнения будет:
Для решения задачи линейной фильтрации принимаемой композиции сигнала и помехи в предлагаемом способе нет необходимости рассчитывать значения параметра ai, так как выражение (9) позволяет на интервалах [xi, xi+1) рассматривать (7) как линейное стохастическое уравнение, вследствие чего алгоритм фильтрации для этого интервала представим как фильтр Калмана с параметрами, меняющимися в зависимости от номера интервала Δi, к которому принадлежит текущая оценка процесса x(t). Рассмотрим стохастическое дифференциальное уравнение 1-го порядка вида:

где f(x), - детерминированные дифференцируемые функции.
Если проинтегрировать обе части (7), то получим, после операции осреднения что коэффициент сноса будет равен [2]:

Соответственно коэффициент диффузии имеет вид:

Значение коэффициента bi будет определяться с учётом критерия:
В работах [2] [4] показано, что выражения (13-14) позволяют непосредственно по виду СДУ (7) выписать коэффициенты сноса и диффузии и, следовательно, составить уравнение Фоккера-Планка-Колмогорова (ФКБ) для эволюции плотности вероятности марковского процесса (7).
В случае когда f(x), аппроксимируются, кусочно-постоянной функцией коэффициенты сноса и диффузии для i-ой секции будут определяться выражением:
Соответствующее уравнение ФПК будет иметь вид:

Решение уравнения (7) при сформулированных выше условиях записывается в виде [2]:
Как видно, плотность вероятности перехода имеет вид нормального распределения с математическим ожиданием bit и дисперсией  С течением времени дисперсия увеличивается, причем математическое ожидание с ростом времени равномерно смещается в ту или иную секцию в зависимости от знака коэффициента K1,i(х)=bi.
С течением времени дисперсия увеличивается, причем математическое ожидание с ростом времени равномерно смещается в ту или иную секцию в зависимости от знака коэффициента K1,i(х)=bi.

Таким образом, плотность вероятности случайного процесса, у которого f(x) аппроксимированы кусочно-постоянными функциями, как и в случае аппроксимации кусочно-линейными функциями, представляет собой сочленение частей нормальных плотностей вероятности, определяемых значениями  Предположим, что задана стохастическая ДС уравнений вида:
Предположим, что задана стохастическая ДС уравнений вида:

n0(t) и n1(t) - белые гауссовские шумы, математическое ожидание и корреляционные функции которых определяются выражениями:

Известно, что в задачах линейной фильтрации нет необходимости вычислять плотность вероятности, достаточно найти оценку математического ожидания процесса в каждой точке и дисперсию этой оценки [14] [15] [16].
Так как в задачах линейной фильтрации не требуется вычислять плотность вероятности, а достаточно найти оценку математического ожидания процесса в каждой точке и дисперсию этой оценки, то можно после стандартной процедуры осреднения [2] [4] [9] [10] [13] записать уравнение оценки случайного процесса x(t)∈Δi, задаваемого системой (19) в виде:
Учитывая, что на уровне математических моделей система и сигнал неразличимы, уравнения (20) могут быть использованы и при решении задач фильтрации и обнаружения сигналов [9] [10] [13] [16]. [8]
Для стационарного режима, когда производная дисперсии на интервале x∈Δi равна нулю, можно записать соотношение:

Если рассматривать весь интервал изменения х∈X, то дисперсия фильтрации случайного процесса x(t) будет представляться вектором  Таким образом, имеет место соответствие:
Таким образом, имеет место соответствие:  и система уравнений (20) представляется уравнениями:
и система уравнений (20) представляется уравнениями:
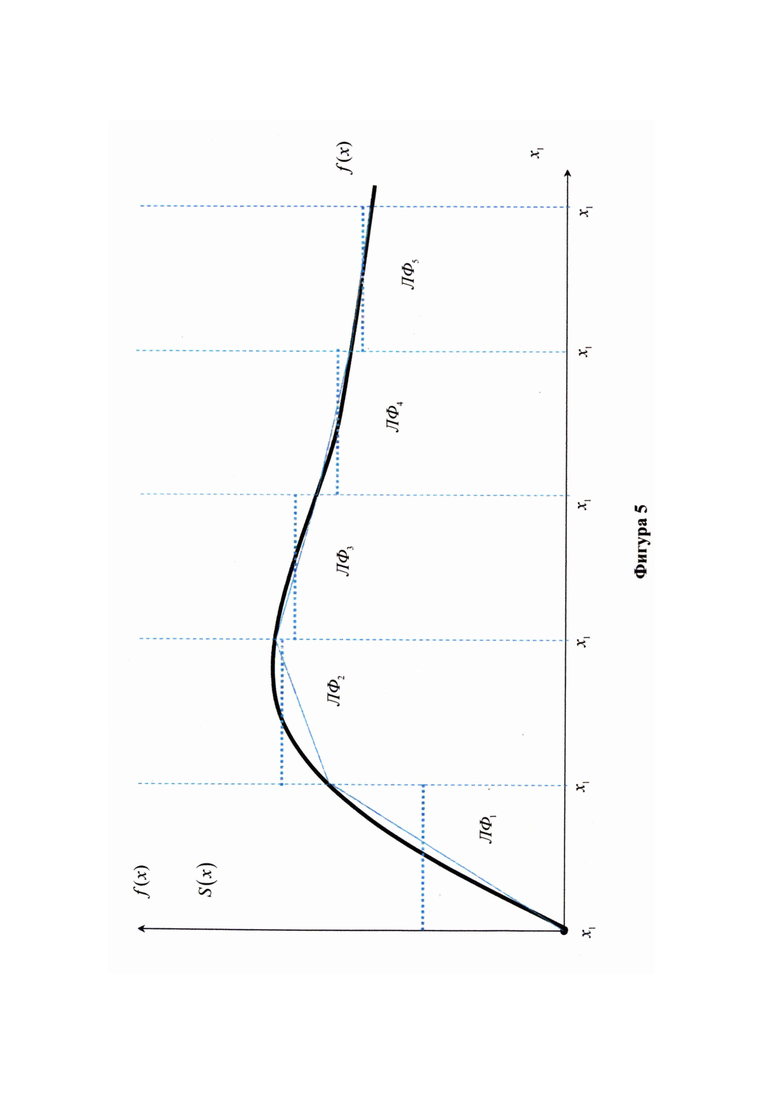
Иллюстрация метода аппроксимации нелинейной функции сплайном нулевого порядка представлена на фигуре 5
Из выражения (22) следует, что в стационарном режиме дисперсия фильтрации постоянна на интервалах Δi и меняется при переходе к другому интервалу ступенчатым образом. При этом необходимо отметить, что на каждом интервале реализуется линейный фильтр Калмана-Бьюси. При этом дисперсия фильтрации является функцией только оценки  Важным фактором с вычислительной точки зрения, является то, что стационарные коэффициенты усиления
Важным фактором с вычислительной точки зрения, является то, что стационарные коэффициенты усиления  могут быть рассчитаны априори и представляться в виде вектора чисел. Поэтому реализация метода фильтрации со стационарными коэффициентами требует значительно меньших объемов памяти и вычислительных затрат. Но с другой стороны, учитывая, что современная элементная база вычислительной техники непрерывно развивается, а объемы памяти возрастают, предварительный расчет и запоминание вектора функций
могут быть рассчитаны априори и представляться в виде вектора чисел. Поэтому реализация метода фильтрации со стационарными коэффициентами требует значительно меньших объемов памяти и вычислительных затрат. Но с другой стороны, учитывая, что современная элементная база вычислительной техники непрерывно развивается, а объемы памяти возрастают, предварительный расчет и запоминание вектора функций  не представляет собой принципиальных сложностей.
не представляет собой принципиальных сложностей.
В настоящей способе предлагается, как было показано выше, использовать вместо сплайнов 1-го порядка использовать сплайны 0-го порядка (кусочно-постоянная аппроксимация). В этом случае матрица будет нулевой А=0
аппроксимация 
Уравнение оценивания состояния ДС можно записать в виде:
В, z - вектор-столбцы (m×1);
K - матричный коэффициент усиления (m×m);
R - корреляционная матрица ошибок фильтрации (m×m).
Из последней системы уравнений следует, что уменьшается как минимум на порядок, так как в уравнениях оценки отсутствуют умножения матриц, которые требуют n3. Следовательно, общее число вычислительных затрат составит ~3n2 При этом надо отметить, что коэффициент усиления K и вектор В вычисляются заранее и могут храниться в памяти. При попадании оценки  и
и  в соответствующий под интервале работает ФКБ с соответствующими данному интервалами коэффициентами. Таким образом, как и в случае аппроксимации нелинейной функции сплайном 1-го порядка (дефекта 0) структура оптимального нелинейного фильтра представляется как ФКБ с переменными параметрами
в соответствующий под интервале работает ФКБ с соответствующими данному интервалами коэффициентами. Таким образом, как и в случае аппроксимации нелинейной функции сплайном 1-го порядка (дефекта 0) структура оптимального нелинейного фильтра представляется как ФКБ с переменными параметрами
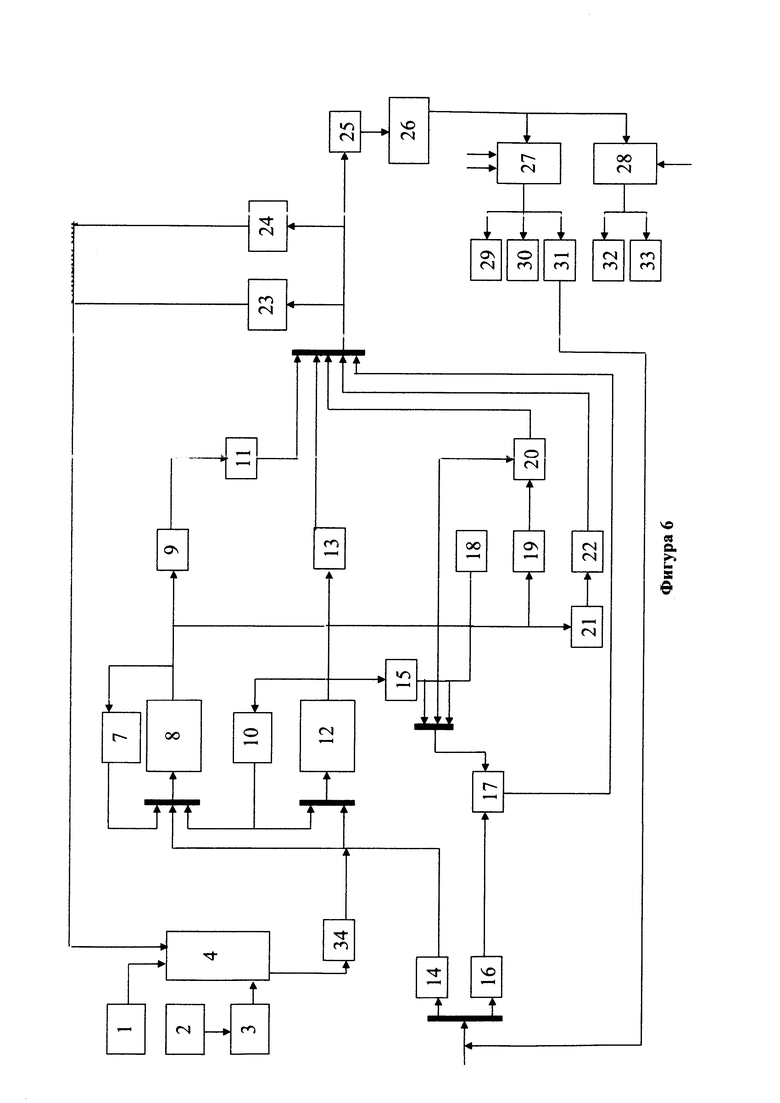
Предлагаемый способ обработки сигналов на основе прототипа и системы уравнений (6) представлен на фигуре 6, где:
блок 1 - блок определения узловых точек на интервале;
блок 2 - блок формирования системы интервалов;
блок 3 - блок сравнения оценки помехи с системой интервалов;
блок 4 - блок определения значения оценки помехи [х*(1)];
блок 7 - блок усиления на коэффициент
блоки 8, 12, 26 - интеграторы; 
блоки 9, 13, 21 - квадраторы;
блок 10 - блок усиления на коэффициент 
блоки 11, 15, 22 - блоки усиления на коэффициент [-1];
блок 14 - блок усиления на коэффициент 
блоки 16,19 - блоки усиления на коэффициент [2];
блоки 17, 20 - перемножители;
блок 18 - блок формирования опорного сигнала;
блок 25 - блок усиления на коэффициент 
блок 27 - двухпороговое устройство;
блок 28 - однопороговое устройство;
блоки 29, 32 - блоки принятия решения при гипотезе наличия сигнала;
блок 30, 33 - блок принятия решения при гипотезе отсутствия сигнала;
блок 31 - блок, реализующий продолжение наблюдения.
блок 23 - блок вычисления значения следующей оценки помехи [x*(2)];
блок 24 - блок вычисления значения следующей оценки помехи [х*(3)];
исключены блоки:
блок 5 - блок определения величины коэффициента [ai];
блок 6 - блок определения величины коэффициента [hi];
дополнительно включенные блоки:
блок 34 - блок определения величины коэффициента [bi];
Работа алгоритма фильтрации помехи заключается в следующем.
1. С учетом начальных значений  и
и  и первого уравнения системы (22) находится значение оценки помехи
и первого уравнения системы (22) находится значение оценки помехи  .
.
2. Значение оценки соотносится с системой интервалов {Δi}. В результате определяются величины коэффициентов bi(1) и дисперсия  , которые используются для определения следующей оценки
, которые используются для определения следующей оценки 
3. С приходом отсчета реализации u1 на основании системы уравнений (22) вычисляется следующая оценка помехи 
4. Полученное значение  соотносится с множеством интервалов {Δi} и снова определяется тройка
соотносится с множеством интервалов {Δi} и снова определяется тройка 
5. С учетом полученных значений коэффициентов bi(2), дисперсии  и системы (22) находится следующее значение оценки помехи
и системы (22) находится следующее значение оценки помехи 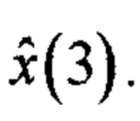
6. Повторяются процедуры 2-5.
Так как линейная СДУ определяет гауссовскую плотность вероятности, то аппроксимация нелинейной СДУ кусочно-постоянной функцией приводит к тому, что апостериорная плотность вероятности представляется в виде кусочной функции, «склеенной» из кусков нормальных плотностей вероятности при различных математических ожиданиях и дисперсиях (определяемых коэффициентами bi).
Коэффициенты bi в общем случае могут быть как положительными, так и отрицательными. Для каждого отдельного интервала Δxi, т.е. локально, плотности вероятности будут гауссовскими, но в глобальном смысле во всей области изменения х она будет негауссовской.
К описанию прилагаются чертежи:
Фиг. 1 - Аналог. Способ обработки сигналов, основанный методе условной марковской фильтрации.
Фиг. 2 - Прототип. Способ сплайн-фильтрации сигналов.
Фиг. 3 - Сплайновое представление тестового сигнала.
Фиг. 4 - Спектральные плотности вероятности тестового процесса ps(x) и его приближение сплайнами phs(x).
Фиг. 5 - Иллюстрация метода аппроксимации нелинейной функции сплайном нулевого порядка.
Фиг. 6 - Предлагаемый способ. Способ обработки сигналов.
Список использованных источников
1. Марчук В.И., Шерстобитов А.И., Гавриленко Д.С. Особенности фильтрации цифровых сигналов в условиях ограниченности выборки его исходной реализации. Успехи современной радиоэлектроники. // Зарубежная радиоэлектроника, № 9, 2011. С. 4-10.
2. Казаков B.A. Введение в теорию марковских процессов и некоторые радиотехнические задачи. Москва: Советское радио, 1973. 232 с.
3. Бутырский Е.Ю., Васильев В.В., Шклярук О.Н., Обухов Е.В. Способ сплайн-фильтрации сигналов, патент на изобретение 2611640, 2018.
4. Тихонов В.И., Харрисов В.Н. Статический анализ и синтез радиотехнических устройств и систем. Москва: Радио и связь, 1991. 608 с.
5. Бурова И.Г., Демьянович Ю.К. Теория минимальных сплайнов. Санкт-Петербург: СПбГУ, 2001. 315 с.
6. Завьялов Ю.С., Квасов Б.И., Мирошниченко В.Л. Метод сплайн-функций. Москва: Наука, 1980. 352 с.
7. Ашинянц Р.А., Морозова Т.Ю. Регуляризация алгоритма фильтрации Калмана-Бьюси при плохой обусловленности корреляционной матрицы шума // Цифровая обработка сигналов, № 4, 2007. С. 29-32.
8. Розов А.К. Нелинейная фильтрация сигналов. Санкт-Петербург: Политехника, 1994. 381 с.
9. Бутырский Е.Ю. Аппроксимация многомерных функций // Информация и Космос, №4, 2006. С. 38-49.
10. Бутырский Е.Ю. Основы теории сплайн-фильтрации сигналов // Информация и Космос, № 1, 2010. С. 34-39.
11. Бутырский Е.Ю., Васильев В.В., Понкратова К.И. Конструктивный негладкий анализ и смежные вопросы // Spline-Approximation in the Task Status Estimation of Nonlinear Dynamic Systems. 2017. T. 2. C. 251-254.
12. Сосулин Ю.Г. Теория обнаружения и оценивания стохастических сигналов. Москва: Советское радио, 1978. 319 с.
13. Бутырский Е. Ю. Обнаружение сигналов на фоне марковской реверберационной помехи // Научное приборостроение, Т. 22, №3, 2012 С. 87-95.
14. Бутырский E. Ю. Сплайн модели сигналов и сплайн фильтрация // Национальная безопасность и стратегическое планирование, №2 (6), 2014. C. 43-56.
15. Бутырский Е.Ю., Васильев B.B., Понкратова К.И. Линейная сплайн-интерполяция в задаче обнаружения сигналов // Информация и Космос., №3, 2017. C. 48-54.
16. Бутырский Е.Ю. Методы моделирования и оценивания случайных величин и процессов. СПб: Стратегия Будущего, 2020. 642 с.
17. Демьянович Ю.К.. Локальная аппроксимация на многообразии и минимальные сплайны. Санкт-Петербург: СПбГУ, 2001. 346 с.
18. Демьянович Ю.К. Всплески и минимальные сплайны. Санкт-Петербург: СПБГУ, 2003. 36 c.
19. Бутырский Е.Ю. Обнаружение сигналов на фоне марковской реверберационной помехи // Научное приборостроение, Т. 22, №1, 2012. С. 87-95.
20. Бутырский Е.Ю. Основы сплайн-фильтрации сигналов // Информация и космос, №1, 2010. С. 34-39.
21. Бутырский Е.Ю. Кусочно-постоянная аппроксимация в задаче фильтрации сигналов // Информация и космос, №1, 2021. С. 28-38.
22. Бутырский Е.Ю., Васильев В.В., Понкратова К.И. Линейная сплайн-интерполяция в задаче обнаружения сигналов // Информация и космос, № 3, 2017. С. 48-55.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ | 2021 |
|
RU2782160C1 |
| Способ сплайн-фильтрации сигналов | 2017 |
|
RU2651640C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА СИГМА-ТОЧЕЧНОГО ФИЛЬТРА КАЛМАНА | 2024 |
|
RU2840100C1 |
| УСТРОЙСТВО АДАПТИВНОГО ОЦЕНИВАНИЯ СОСРЕДОТОЧЕННОЙ ПОМЕХИ | 2008 |
|
RU2381620C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2018 |
|
RU2705770C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ИМПУЛЬСНО-КОДОВОЙ МОДУЛЯЦИИ - ДЕМОДУЛЯЦИИ СИГНАЛОВ | 2011 |
|
RU2446558C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2020 |
|
RU2764781C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| Способ определения мгновенного положения точки промаха беспилотного летательного аппарата по информации угломерного канала | 2019 |
|
RU2721623C1 |
| Способ пространственно-временного приема сигналов с аналоговой модуляцией с отслеживанием изменяющегося направления на источник сигнала | 2016 |
|
RU2628876C1 |
Использование: изобретение относится к области радиоэлектроники и гидроакустики, а именно к способам обнаружения, обработки сигнала при наличии помех. Изобретение заключается в реализации разработки оптимального метода обнаружения гидроакустического сигнала в условиях помех, описываемых нелинейными стохастическими уравнениями. Сущность: способ обработки сигналов основывается на методе условной марковской фильтрации, который включает в себя: решение уравнений фильтрации для гипотезы наличия/отсутствия сигнала; уравнения правдоподобия; уравнения для вычисления коэффициентов усиления. Отличительной особенностью способа обработки сигналов является то, что для получения оценок помехи при нелинейном уравнении состояния дополнительно используется кусочно-постоянные функции, а область динамического диапазона изменений нелинейной функции разбивается на интервалы, в каждом из которых реализуется линейное представление уравнения состояния, что позволяет на каждом из поддиапазонов реализовать фильтр Калмана-Бьюси, включающего в себя: два уравнения оценки состояния при гипотезах наличия/отсутствия сигнала; уравнения оценки дисперсии на различных интервалах и уравнения правдоподобия, включающего эти оценки, и по результатам вычисления которого выносится решение об обнаружении или необнаружении сигнала, с учетом критерия минимума среднего квадрата ошибки. Технический результат: уменьшение вычислительных затрат, обеспечение высокой эффективности обнаружения сигнала при различных помехах, получение более эффективного алгоритма фильтрации и возможность работы в реальном масштабе времени. 6 ил.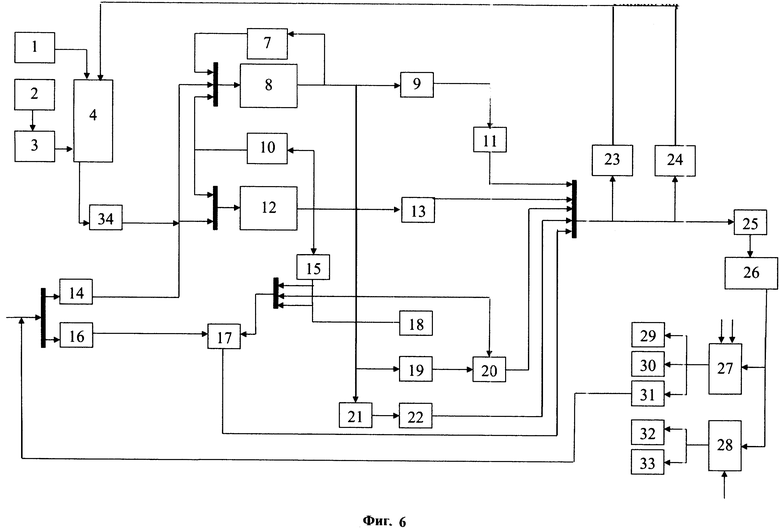
Способ обработки сигналов, основанный на операции сплайн-фильтрации сигналов, содержащий: операцию решения уравнений фильтрации для гипотезы наличия/отсутствия сигнала; операцию решения уравнения правдоподобия; операции решения уравнения для вычисления коэффициентов усиления, для получения оценок помехи при нелинейном уравнении состояния и уменьшения вычислительных затрат при нелинейной фильтрации, использующей сплайн-интерполяцию нелинейной функции, область динамического диапазона изменений нелинейной функции разбивается на интервалы, в каждом из которых реализуется операция линейной аппроксимации нелинейной функции, входящей в уравнение состояния, описывающего динамику помехи, что позволяет на каждом из поддиапазонов реализовать фильтр Калмана-Бьюси, включающего в себя: операции решения двух уравнений оценивания помехи при гипотезах наличия/отсутствия сигнала; операции решения уравнения оценки дисперсии на различных интервалах и операции решения уравнения правдоподобия, включающего эти оценки, и по результатам вычисления которого выносится решение об обнаружении или необнаружении сигнала, отличающийся тем, что, с целью уменьшения вычислительных и ёмкостных затрат, а также упрощения блока управления при решении задач фильтрации помехи и обнаружения сигнала на её фоне, дополнительно на основе измеренных наблюдаемых значений принимаемой смеси сигнала и помех на антенну радиотехнического средства на каждом из подынтервалов и критериев минимума среднего квадрата ошибки проводится операция определения значения постоянной, аппроксимирующей нелинейную функцию, на каждом подынтервале, что позволяет реализовывать линейный фильтр Калмана-Бьюси в упрощенном виде без вычисления матрицы перехода, присутствующей при линейном представлении, из предыдущего состояния в последующее, что в целом реализует операцию аппроксимации нелинейной функции кусочно-линейной функцией на всем динамическом диапазоне измеряемых значений смеси сигнала и помехи.
| Способ сплайн-фильтрации сигналов | 2017 |
|
RU2651640C1 |
| УСТРОЙСТВО АДАПТИВНОГО ОЦЕНИВАНИЯ СОСРЕДОТОЧЕННОЙ ПОМЕХИ | 2008 |
|
RU2381620C1 |
| Устройство для многоточечного дистанционного контроля, регулирования и сигнализации физических параметров | 1956 |
|
SU118443A1 |
| Устройство для обнаружения сигналов и определения направления на их источник | 2016 |
|
RU2617884C1 |
| US 3462590 A1, 19.08.1969. | |||
