ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к способу помощи при вождении и устройству помощи при вождении.
УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Изобретение, заставляющее рассматриваемое транспортное средство автономно следовать за находящимся впереди транспортным средством, известно из предшествующего уровня техники (Патентный документ 1). В изобретении, раскрытом в Патентном документе 1, когда рассматриваемое транспортное средство останавливается на светофоре, определяется количество запросов начала движения, и период утверждения начала движения устанавливается в соответствии с обнаруженным количеством запросов начала движения.
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0003] Патентный документ 1: Публикация международной заявки №. 2017/009940
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Проблема, решаемая изобретением
[0004] Когда рассматриваемое транспортное средство останавливается, желательно обнаруживать транспортные средства, которые могут встраиваться перед рассматриваемым транспортным средством.
[0005] Ввиду проблемы, описанной выше, цель настоящего изобретения состоит в том, чтобы предоставить способ помощи при вождении и устройство помощи при вождении, которые способны обнаруживать транспортные средства, которые могут встраиваться перед рассматриваемым транспортным средством, когда рассматриваемое транспортное средство останавливается.
Средство для решения проблемы
[0006] В способе помощи при вождении согласно одному аспекту настоящего изобретения поле обнаружения датчика устанавливается перед рассматриваемым транспортным средством; когда рассматриваемое транспортное средство движется, определяется, что другое транспортное средство встроилось перед рассматриваемым транспортным средством, если степень, в которой другое транспортное средство вошло в поле обнаружения, превышает или равна первому заданному значению, и когда рассматриваемое транспортное средство остановлено, определяется, что другое транспортное средство встроилось перед рассматриваемым транспортным средством, если упомянутая степень превышает или равна второму заданному значению, которое меньше первого заданного значения.
Эффекты изобретения
[0007] Посредством настоящего изобретения становится возможным обнаруживать транспортные средства, которые могут встраиваться перед рассматриваемым транспортным средством, когда рассматриваемое транспортное средство остановлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
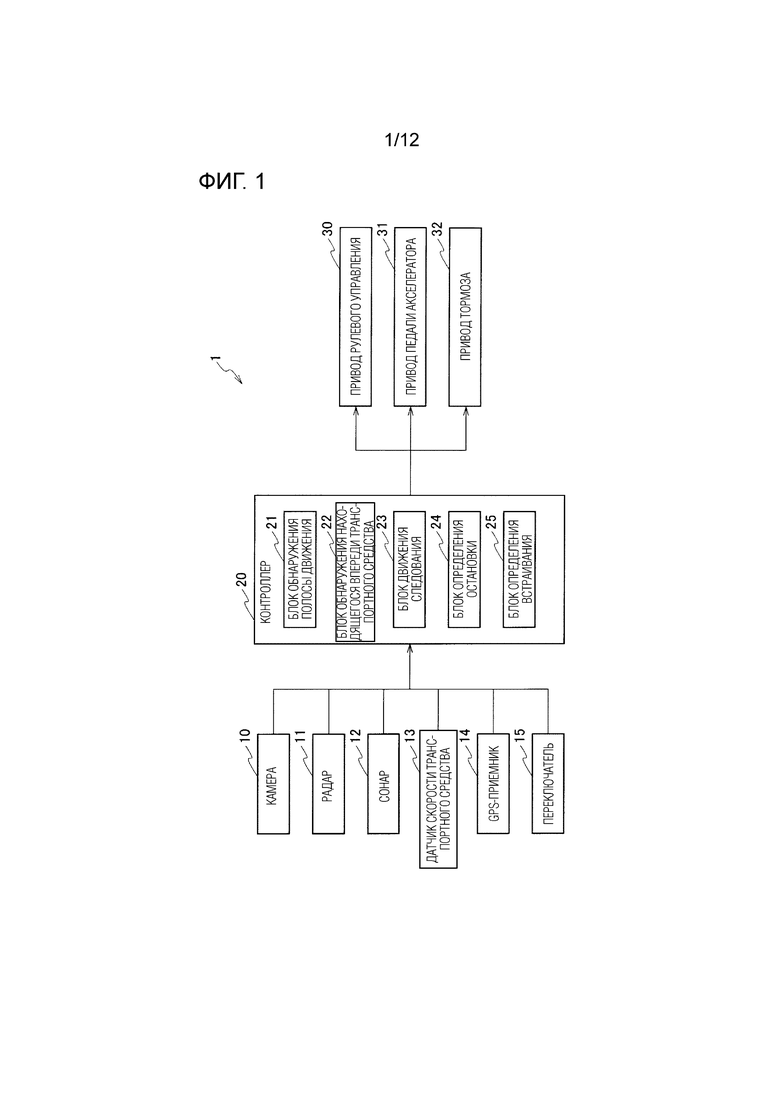
[0008] Фиг.1 представляет собой блок-схему устройства 1 помощи при вождении согласно варианту осуществления настоящего изобретения.
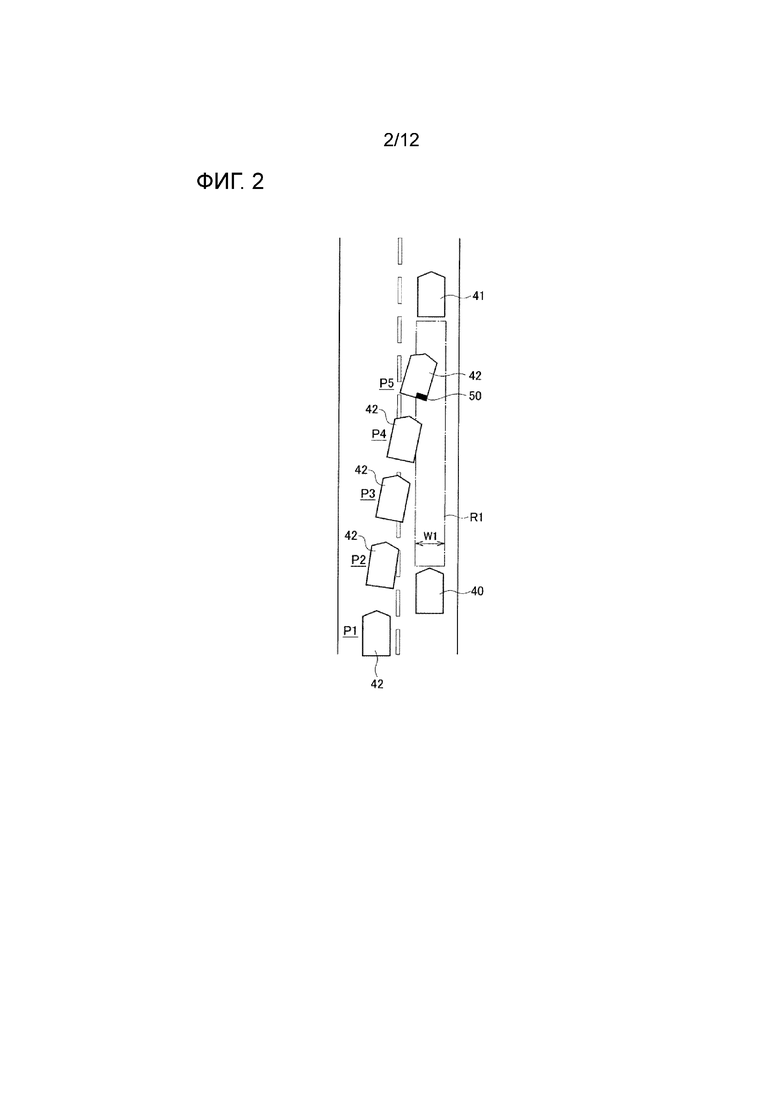
Фиг.2 представляет собой схему, показывающую один из примеров способа обнаружения встраивания.
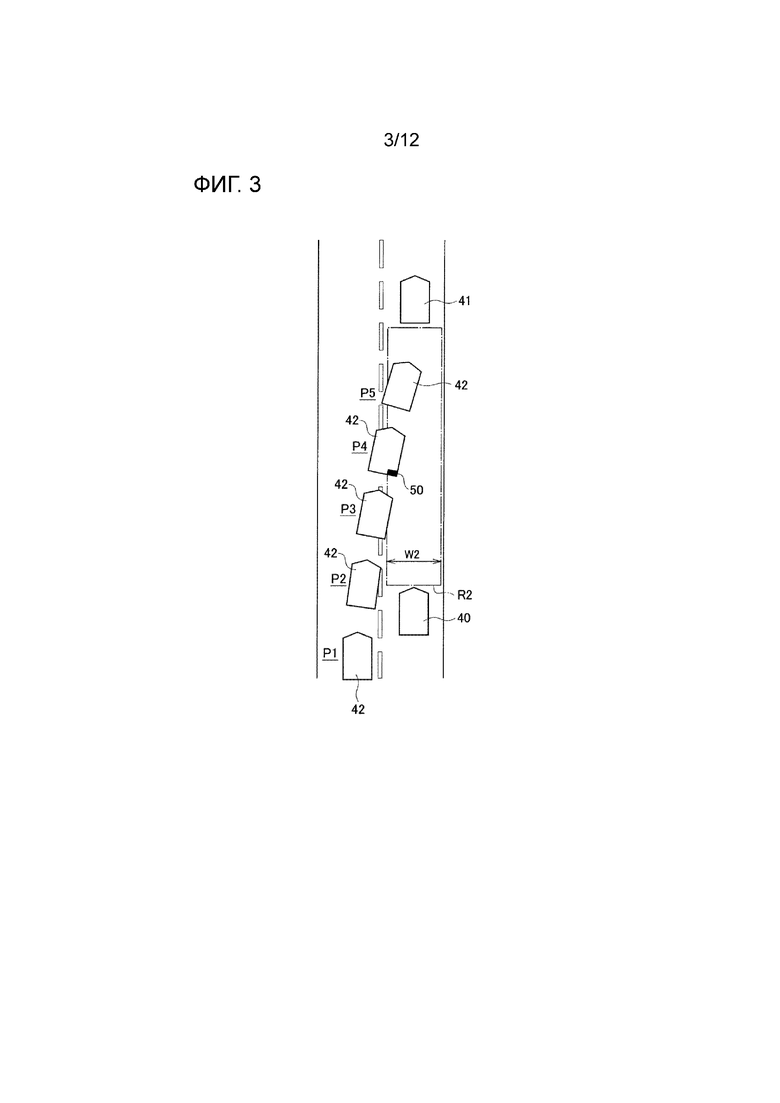
Фиг.3 представляет собой схему, показывающую еще один пример способа обнаружения встраивания.
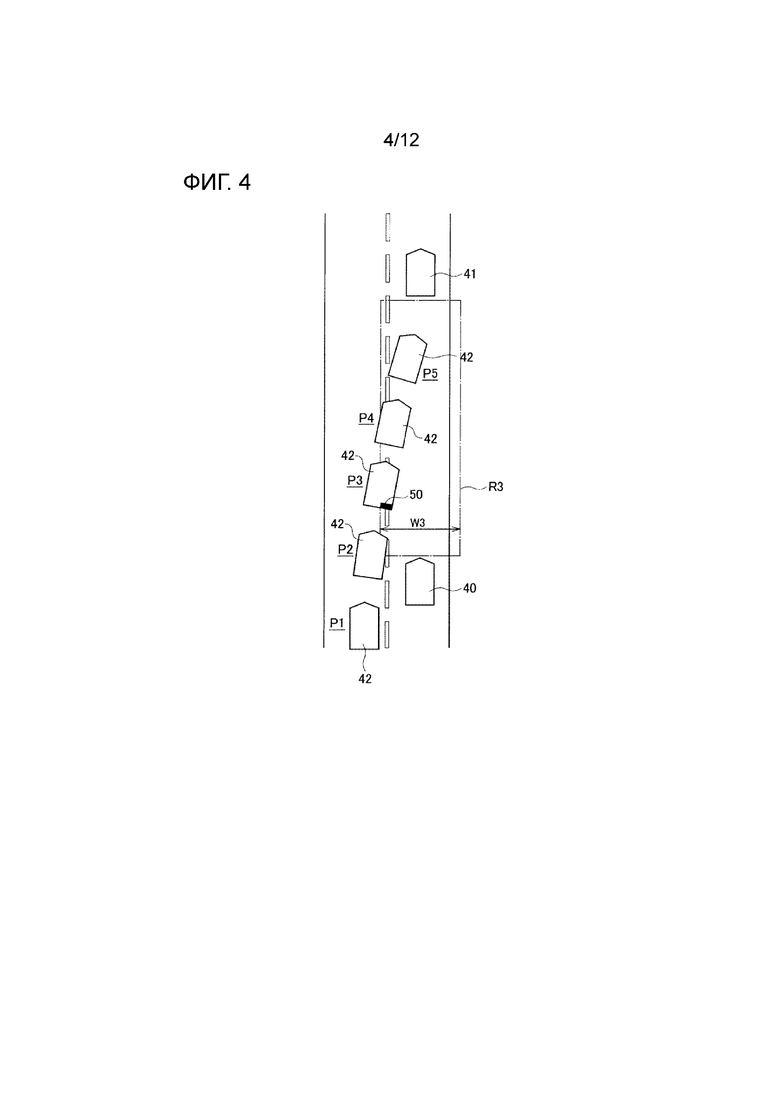
Фиг.4 представляет собой схему, показывающую еще один пример способа обнаружения встраивания.
Фиг.5 представляет собой схему, показывающую еще один пример способа обнаружения встраивания.
Фиг.6 представляет собой схему, показывающую еще один пример способа обнаружения встраивания.
Фиг.7 представляет собой схему, показывающую другой пример способа обнаружения встраивания.
Фиг.8 представляет собой блок-схему последовательности операций, поясняющую один пример работы устройства 1 помощи при вождении.
Фиг.9 представляет собой схему, показывающую еще один пример способа обнаружения встраивания.
Фиг.10 представляет собой схему, показывающую другой пример способа обнаружения встраивания.
Фиг.11 представляет собой схему, показывающую другой пример способа обнаружения встраивания.
Фиг.12 представляет собой схему, показывающую еще один пример способа обнаружения встраивания.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0009] Вариант осуществления настоящего изобретения описывается ниже со ссылкой на чертежи. В описаниях чертежей идентичным частям присвоены одинаковые ссылочные местоположения, а их описания опущены.
[0010] Пример конфигурации устройства 1 помощи при вождении будет описан со ссылкой на фиг.1. Устройство 1 помощи при вождении установлено на рассматриваемом транспортном средстве, оборудованном функцией автономного вождения. Функция автономного вождения включает в себя ACC (адаптивный круиз-контроль), поддержание полосы движения, автоматическую смену полосы движения, автоматическую парковку и т.п., но в настоящем варианте осуществления устройство 1 помощи при вождении в основном используется для ACC. ACC - это функция автономного вождения, которая автоматически управляет ускорением/замедлением рассматриваемого транспортного средства со скоростью, заранее установленной пользователем в качестве верхнего предела, тем самым заставляя рассматриваемое транспортное средство следовать за находящимся впереди транспортным средством. Управление расстоянием между транспортными средствами также выполняется для поддержания расстояния между транспортными средствами, соответствующего скорости, установленной в это время.
[0011] Управление следованием включает в себя управление для побуждения рассматриваемого транспортного средства следовать за находящимся впереди транспортным средством после обнаружения начала движения находящегося впереди транспортного средства, когда рассматриваемое транспортное средство остановлено из-за затора движения, ожидания светофора и т.п.
[0012] Как показано на фиг.1, устройство помощи при вождении 1 содержит камеру 10, радар 11, сонар 12, датчик 13 скорости транспортного средства, GPS-приемник 14, переключатель 15, контроллер 20, привод 30 рулевого управления, привод 31 педали акселератора и привод 32 тормоза.
[0013] Множество камер 10 предусмотрено на передних, боковых, задних зеркалах обзора и т.п. Камера 10 содержит элемент формирования изображения, такой как ПЗС (устройство с зарядовой связью), КМОП (комплементарная структура металл-оксид-полупроводник) и т.п. Камера 10 обнаруживает объекты в окрестностях транспортного средства (пешеходы, велосипеды, двухколесные транспортные средства, другие транспортные средства и т.п.), а также информацию, относящуюся к окружающей среде транспортного средства (линии границ дороги, светофоры, знаки, пешеходные переходы, перекрестки и т.д.). Камера 10 выводит захваченные изображения на контроллер 20.
[0014] Множество радаров 11 предусмотрено спереди, по бокам, сзади и т.д. рассматриваемого транспортного средства. Радар 11 излучает радиоволны в направлении объекта на периферии рассматриваемого транспортного средства и измеряет отраженные волны, тем самым измеряя расстояние и направление до объекта. Радар 11 передает данные измерений в контроллер 20.
[0015] Сонар 12 устанавливается на переднем бампере или передней решетке. Сонар 12 излучает ультразвуковые волны и измеряет отраженные волны, тем самым измеряя направление и расстояние до объекта, находящегося поблизости (например, примерно 1-2 м) от рассматриваемого транспортного средства. Сонар 12 выдает измеренные данные в контроллер 20.
[0016] Датчик 13 скорости транспортного средства определяет скорость рассматриваемого транспортного средства и выводит обнаруженную скорость на контроллер 20.
[0017] GPS-приемник 14 принимает радиоволны от спутника для обнаружения информации о местоположении рассматриваемого транспортного средства на земле. Информация о местоположении рассматриваемого транспортного средства, обнаруженная GPS-приемником 14, включает в себя информацию о широте и долготе. Однако способ обнаружения информации о местоположении рассматриваемого транспортного средства не ограничивается использованием GPS-приемника 14. Например, местоположение можно оценить с помощью способа, называемого одометрией. Одометрия - это метод оценки положения рассматриваемого транспортного средства путем вычисления величины и направления движения рассматриваемого транспортного средства в соответствии с углом поворота и угловой скоростью вращения рассматриваемого транспортного средства. Местоположение, где установлен GPS-приемник 14, особо не ограничивается, но GPS-приемник 14 может быть установлен, например, на приборной панели рассматриваемого транспортного средства. GPS-приемник 14 выводит информацию об обнаруженном местоположении в контроллер 20.
[0018] Множество переключателей 15 установлено на рулевом колесе. Множество переключателей 15 включает в себя переключатель для выбора радиоканала, переключатель для регулировки громкости, переключатель для активации ACC, переключатель для регулировки скорости, управляемой с помощью ACC, переключатель для установки расстояния между транспортными средствами, когда ACC активирован, переключатель для активации движения следования, когда находящееся впереди транспортное средство начинает движение, и т.п. Переключатели 15 описаны как физические переключатели в настоящем варианте осуществления, но настоящее изобретение этим не ограничивается. Переключатели 15 могут быть виртуальными переключателями. Если переключатели 15 являются виртуальными переключателями, переключатели 15 могут отображаться на сенсорной панели, которая используется для навигационного устройства.
[0019] Контроллер 20 представляет собой электронный блок управления (ЭБУ), имеющий ЦП (центральный процессор), ПЗУ (постоянное запоминающее устройство), ОЗУ (оперативное запоминающее устройство), схему связи CAN (локальная сеть контроллеров) и т.п. Компьютерная программа установлена в контроллере 20, чтобы заставить его функционировать как устройство 1 помощи при вождении. Выполняя компьютерную программу, контроллер 20 функционирует как множество схем обработки информации, включенных в устройство 1 помощи при вождении. Здесь показан пример, в котором множество схем обработки информации, включенных в устройство 1 помощи при вождении, реализовано в программном обеспечении, но схемы обработки информации, конечно, могут содержать специализированное аппаратное обеспечение для выполнения каждой из обработок информации, показанных ниже. Кроме того, множество схем обработки информации может быть реализовано в виде дискретных аппаратных средств. Контроллер 20 содержит в качестве множества схем обработки информации блок 21 обнаружения полосы движения, блок 22 обнаружения находящегося впереди транспортного средства, блок 23 движения следования, блок 24 определения остановки и блок 25 определения встраивания.
[0020] Блок 21 обнаружения полосы движения использует изображение, полученное камерой 10, для обнаружения полосы движения, по которой движется рассматриваемое транспортное средство. В частности, блок 21 обнаружения полосы движения выделяет разделительные линии из изображения и обнаруживает полосу движения, по которой движется рассматриваемое транспортное средство. Блок 21 обнаружения полосы движения может дополнительно добавлять информацию о местоположении рассматриваемого транспортного средства, чтобы обнаруживать полосу движения, по которой движется рассматриваемое транспортное средство.
[0021] Блок 22 обнаружения находящегося впереди транспортного средства использует изображение, полученное камерой 10, для обнаружения присутствия находящегося впереди транспортного средства перед рассматриваемым транспортным средством. Кроме того, блок 22 обнаружения находящегося впереди транспортного средства использует данные, полученные от радара 11, для определения расстояния между транспортными средствами между рассматриваемым транспортным средством и находящимся впереди транспортным средством, относительной скорости находящегося впереди транспортного средства по отношению к рассматриваемому транспортному средству и т.д. В настоящем варианте осуществления находящееся впереди транспортное средство определяется как транспортное средство, движущееся по той же полосе движения, что и полоса движения, по которой движется рассматриваемое транспортное средство.
[0022] Блок 23 движения следования управляет рассматриваемым транспортным средством таким образом, что рассматриваемое транспортное средство движется автономно, следуя за находящимся впереди транспортным средством. В частности, когда пользователь включает переключатель для активации ACC, блок 23 движения следования управляет приводом 30 рулевого управления, приводом 31 педали акселератора и приводом 32 тормоза, тем самым заставляя рассматриваемое транспортное средство следовать за находящимся впереди транспортным средством со скоростью заранее установленной пользователем как верхний предел. В это время блок 23 движения следования также выполняет управление расстоянием между транспортными средствами, чтобы поддерживать расстояние между транспортными средствами, которое соответствует скорости, установленной в это время. Пользователь может указать расстояние между транспортными средствами.
[0023] Если находящееся впереди транспортное средство не обнаружено, когда пользователь включает переключатель для активации ACC, блок 23 движения следования заставляет рассматриваемое транспортное средство выполнять движение с постоянной скоростью и заданной скоростью. Если скорость не установлена, блок 23 движения следования может заставить рассматриваемое транспортное средство двигаться автономно, с допустимым ограничением скорости дороги, по которой рассматриваемое транспортное средство в настоящее время движется, в качестве верхнего предела.
[0024] Блок 24 определения остановки определяет, остановилось ли рассматриваемое транспортное средство. В частности, блок 24 определения остановки определяет, что рассматриваемое транспортное средство остановилось, когда скорость рассматриваемого транспортного средства, измеренная датчиком 13 скорости транспортного средства, равна 0 км/ч.
[0025] Блок 25 определения встраивания определяет, встраивалось ли другое транспортное средство между находящимся впереди транспортным средством и рассматриваемым транспортным средством. Блок 25 определения встраивания определяет встраивания во множестве сценариев. Например, блок 25 определения встраивания определяет встраивания между рассматриваемым транспортным средством и находящимся впереди транспортным средством, когда рассматриваемое транспортное средство автономно движется и следует за находящимся впереди транспортным средством. Кроме того, блок 25 определения встраивания определяет встраивание перед рассматриваемым транспортным средством, когда рассматриваемое транспортное средство останавливается на светофоре и т.д. Сценарии остановки рассматриваемого транспортного средства существуют в двух вариантах. Один из них - это сценарий, в котором рассматриваемое транспортное средство останавливается позади находящегося впереди транспортного средства. Этот сценарий происходит в загруженном транспортном потоке, при ожидании на светофоре на перекрестке и т.д. Другой - сценарий, в котором рассматриваемое транспортное средство остановлено в состоянии, в котором нет находящегося впереди транспортного средства. Этот сценарий возникает, когда рассматриваемое транспортное средство останавливается перед линией на перекрестке.
[0026] Один пример способа определения блока 25 определения встраивания будет описан со ссылкой на фиг.2-4. Сценарий на фиг.2 показывает рассматриваемое транспортное средство 40, которое движется автономно и следует за находящимся впереди транспортным средством 41. Кроме того, сценарий на фиг.2 изображает скоростную автомагистраль, но он также применим к другим дорогам, кроме скоростных. R1 на фиг.2 указывает область для обнаружения другого транспортного средства, которое встраивается между находящимся впереди транспортным средством 41 и рассматриваемым транспортным средством 40. Область R1 указывает поле обнаружения камеры 10. Будет описан размер области R1. Ширина в направлении ширины транспортного средства области R1 является шириной W1 транспортного средства у рассматриваемого транспортного средства 40, как показано на фиг.2. Длина в направлении движения области R1 измеряется от переднего конца рассматриваемого транспортного средства 40 до заднего конца находящегося впереди транспортного средства 41.
[0027] P1-P5 на фиг.2 указывают местоположения другого транспортного средства 42. Когда другое транспортное средство 42 из местоположения P1 встраивается между рассматриваемым транспортным средством 40 и находящимся впереди транспортным средством 41, траектория движения другого транспортного средства 42 будет описываться пологой кривой, обозначенной местоположениями P2-P5. Когда другое транспортное средство 42 движется из местоположения P4 в местоположение P5, задняя поверхность другого транспортного средства 42 входит в область R1. 50 на фиг. 2 указывает часть задней поверхности другого транспортного средства 42, которая вошла в область R1 (далее именуемую задней поверхностью 50). Задняя поверхность 50 фотографируется камерой 10. Блок 25 определения встраивания вычисляет площадь задней поверхности 50, полученную камерой 10. Если площадь задней поверхности 50 превышает или равна заданному значению, блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось между находящимся впереди транспортным средством 41 и рассматриваемым транспортным средством 40. Другими словами, если площадь задней поверхности 50 не превышает или не равна заданному значению, блок 25 определения встраивания определяет, что транспортное средство не встроилось между находящимся впереди транспортным средством 41 и рассматриваемым транспортным средством 40.
[0028] Задняя поверхность транспортного средства в настоящем варианте осуществления определяется как вид в проекции транспортного средства, если смотреть сзади. Заданное значение (третье заданное значение), используемое для сравнения с площадью задней поверхности 50, получается экспериментальным путем, моделированием и т.д.
[0029] Размер области R1 не ограничивается размером, показанным на фиг.2. Например, как обозначено областью R2 на фиг.3, ширина в направлении ширины транспортного средства может быть шириной W2 полосы движения, по которой движется рассматриваемое транспортное средство 40. В этом случае, поскольку время, необходимое для того, чтобы площадь задней поверхности 50 превысила или равнялась заданному значению, уменьшается, блок 25 определения встраивания может определять встраивание другого транспортного средства 42 раньше по сравнению со сценарием, показанным на фиг.2. В частности, блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось в местоположении P5 в сценарии, показанном на фиг.2, тогда как блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось в местоположении P4 в сценарии, показанном на фиг. 3.
[0030] Например, как обозначено областью R3 на фиг.4, ширина в направлении ширины транспортного средства может быть шириной W3, которая больше ширины W2. Ширина W3 устанавливается с учетом запаса. В сценарии, показанном на фиг.4, поскольку время, необходимое для того, чтобы площадь задней поверхности 50 превысила или равнялась заданному значению, дополнительно уменьшается, блок 25 определения встраивания может определить встраивание другого транспортного средства 42 даже раньше по сравнению со сценарием, показанным на фиг.3. В частности, блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось в местоположении P4 в сценарии, показанном на фиг.3, тогда как блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось в местоположении P3 в сценарии, показанном на фиг.4.
[0031] Далее будет описан процесс, выполняемый при обнаружении встраивания другого транспортного средства 42 в сценариях, показанных на фиг. 2-4. Если обнаруживается встраивание другого транспортного средства 42, контроллер 20 выдает предупреждение пользователю, едущему на рассматриваемом транспортном средстве 40, замедляет рассматриваемое транспортное средство 40 и т.п. В качестве альтернативы, контроллер 20 может отменить управление следованием. Предупреждение может быть голосовым или отображаемым на мониторе.
[0032] В настоящем варианте осуществления определение того, что другое транспортное средство 42 встроилось, синонимично обнаружению встраивания другого транспортного средства 42.
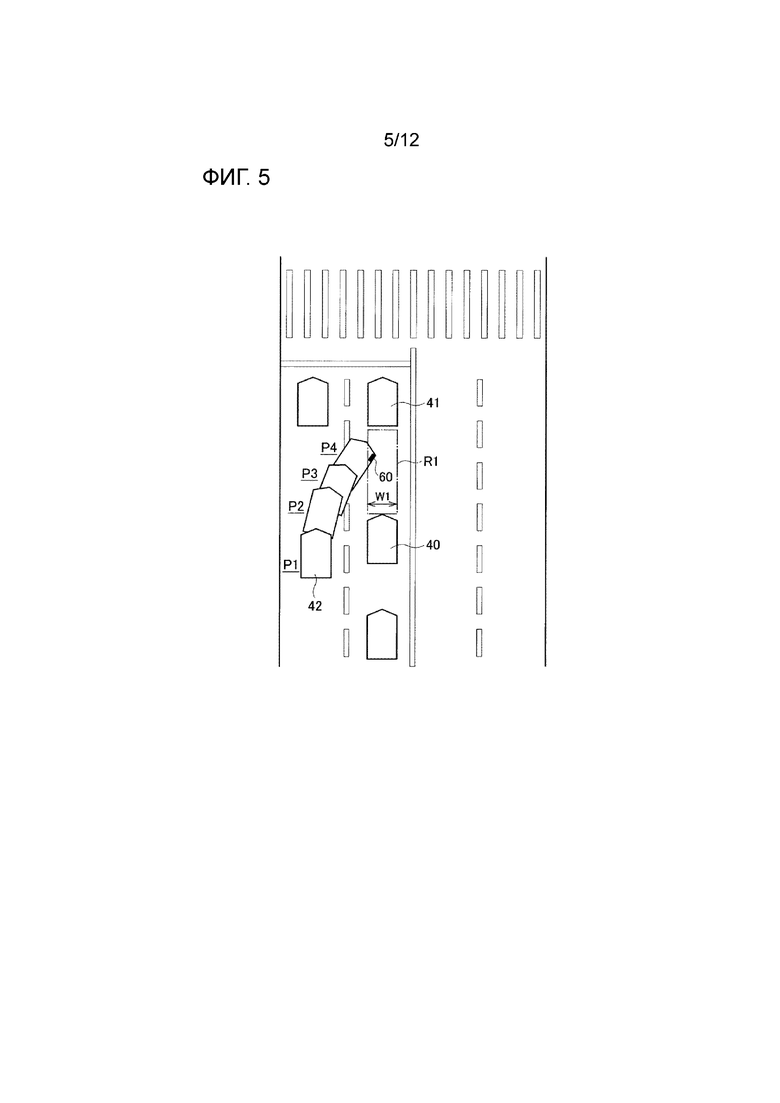
[0033] Один пример способа определения встраивания, когда рассматриваемое транспортное средство 40 остановлено, теперь будет описан со ссылкой на фиг.5. В сценарии, показанном на фиг.5, находящееся впереди транспортное средство 41 и рассматриваемое транспортное средство 40 останавливаются на светофоре. После остановки находящегося впереди транспортного средства 41 и определения того, что расстояние между транспортными средствами станет меньше или равным заданному значению, блок 23 движения следования автоматически останавливает рассматриваемое транспортное средство 40. В это время блок 23 движения следования поддерживает состояние остановки.
[0034] Когда рассматриваемое транспортное средство 40 остановлено, блок 25 определения встраивания определяет встраивания посредством другого способа, чем тот, который используется, когда рассматриваемое транспортное средство 40 движется. В частности, когда рассматриваемое транспортное средство 40 движется, блок 25 определения встраивания использует площадь задней поверхности 50 другого транспортного средства 42, тогда как, когда рассматриваемое транспортное средство 40 остановлено, блок 25 определения встраивания использует область боковой поверхности 60 другого транспортного средства 42. P1-P4 на фиг.5 указывают местоположение другого транспортного средства 42. Если другое транспортное средство 42 из местоположения P1 встраивается между рассматриваемым транспортным средством 40 и находящимся впереди транспортным средством 41, траектория движения другого транспортного средства 42 будет описываться кривой, обозначенной местоположениями P2-P4. Когда траектория движения (кривая) движения другого транспортного средства 42, показанная на фиг.2, сравнивается с траекторией движения (кривой) другого транспортного средства 42, показанной на фиг.5, кривизна кривой на фиг. 5 оказывается больше. Это связано с тем, что расстояние между транспортными средствами между рассматриваемым транспортным средством 40 и находящимся впереди транспортным средством 41 относительно велико во время движения, и, следовательно, угол, под которым другое транспортное средство 42 входит в полосу движения рассматриваемого транспортного средства (полоса движения, в которой рассматриваемое транспортное средство 40 движется) мал, тогда как, когда расстояние между транспортными средствами мало во время остановки, угол, под которым другое транспортное средство 42 входит в полосу движения рассматриваемого транспортного средства, больше.
[0035] В результате, боковая поверхность 60 другого транспортного средства 42, входящего в область R1, легче обнаруживается камерой 10. Кроме того, боковая поверхность 60 другого транспортного средства 42 входит в область R1 перед задней поверхностью 50. Таким образом, в настоящем варианте осуществления, когда рассматриваемое транспортное средство 40 остановлено, встраивание определяется с использованием площади боковой поверхности 60 другого транспортного средства 42. Таким образом, можно обнаружить встраивание раньше, чем в случае, когда встраивание определяется с использованием задней поверхности 50. Поскольку боковая поверхность 60 используется, когда рассматриваемое транспортное средство 40 остановлено, можно уменьшить ошибочное обнаружение боковой поверхности транспортного средства, которое движется по соседней полосе движения на повороте. Соседняя полоса движения означает полосу движения, смежную с полосой движения, по которой движется рассматриваемое транспортное средство 40.
[0036] В сценарии, показанном на фиг.5, если другое транспортное средство 42 переходит из местоположения P3 в местоположение P4, часть боковой поверхности 60 другого транспортного средства 42 входит в область R1. Боковая поверхность 60 фотографируется камерой 10. Блок 25 определения встраивания вычисляет площадь боковой поверхности 60, полученную с камеры 10. Если площадь боковой поверхности 60 превышает или равна заданному значению, блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось между находящимся впереди транспортным средством 41 и рассматриваемым транспортным средством 40.
[0037] Боковая поверхность транспортного средства в настоящем варианте осуществления определяется как вид в проекции транспортного средства, если смотреть сбоку. Заданное значение (четвертое заданное значение), используемое для сравнения с площадью боковой поверхности 60, может быть тем же значением, что и заданное значение (третье заданное значение), используемое для сравнения с площадью задней поверхности 50, или другим значением. Определение размера области R1, показанное на фиг.5, такое же, как определение размера области R1, показанное на фиг.2.
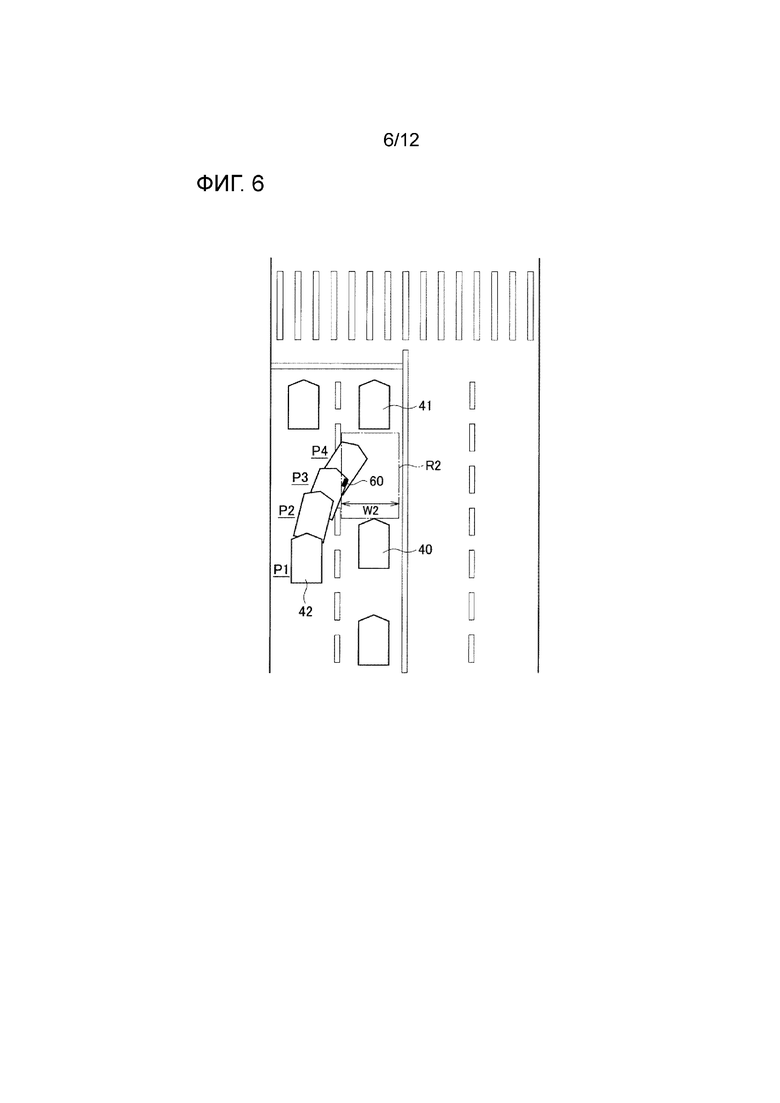
[0038] Размер области R1 не ограничивается размером, показанным на фиг.5. Например, как обозначено областью R2 на фиг.6, ширина в направлении ширины транспортного средства может быть шириной W2 полосы движения, по которой движется рассматриваемое транспортное средство 40. В этом случае, поскольку время, необходимое для того, чтобы площадь боковой поверхности 60 превысила или равнялась заданному значению, уменьшается, блок 25 определения встраивания может определять встраивание другого транспортного средства 42 раньше по сравнению со сценарием, показанным на фиг.5. В частности, блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось в местоположении P4 в сценарии, показанном на фиг.5, тогда как блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось в местоположении P3 в сценарий, показанном на фиг.6.
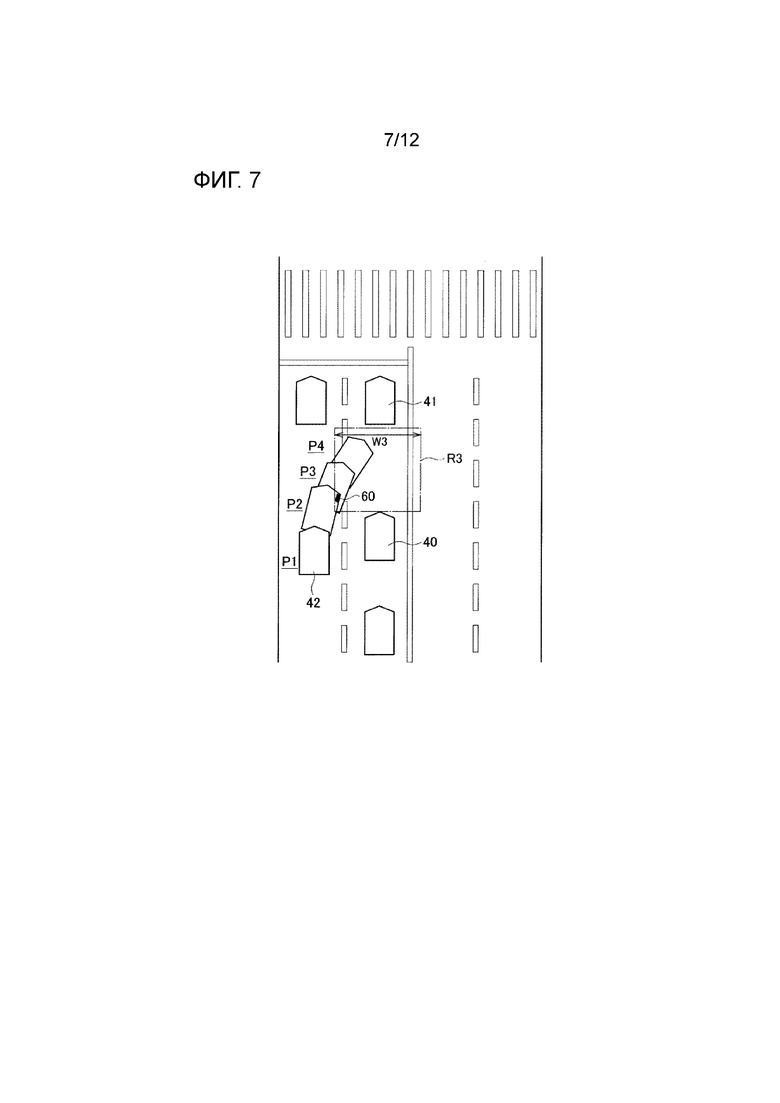
[0039] Например, как обозначено областью R3 на фиг.7, ширина в направлении ширины транспортного средства может быть шириной W3, которая больше ширины W2. Ширина W3 устанавливается с учетом запаса. В сценарии, показанном на фиг.7, поскольку время, необходимое для того, чтобы площадь боковой поверхности 60 превысила или равнялась заданному значению, дополнительно уменьшается, блок 25 определения встраивания может определить встраивание другого транспортного средства 42 даже раньше по сравнению со сценарием, показанным на фиг.6. В частности, блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось в местоположении P3 в сценарии, показанном на фиг.6, тогда как блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось в местоположении P2 в сценарий, показанном на фиг.7.
[0040] Теперь будет описан процесс, который выполняется при обнаружении встраивания другого транспортного средства 42 в сценариях, показанных на фиг. 5-7. Если обнаруживается встраивание другого транспортного средства 42, блок 23 движения следования запрещает начало следования, даже если пользователь вводит команду начала следования. В этом случае, поскольку пользователь не может использовать систему начала следования, пользователю необходимо вручную начать движение рассматриваемого транспортного средства 40. Таким образом, можно начать движение рассматриваемого транспортного средства 40 после того, как пользователь проверит область впереди. Блок 23 движения следования может выдавать предупреждение пользователю, когда начало следования запрещено. Когда находящееся впереди транспортное средство 41 начинает движение и встраивание другого транспортного средства 42 не обнаружено, блок 23 движения следования автоматически начинает движение рассматриваемого транспортного средства 40 в соответствии с командой начала следования пользователя.
[0041] Теперь будет описан один пример работы устройства 1 помощи при вождении со ссылкой на блок-схему последовательности операций на фиг.8.
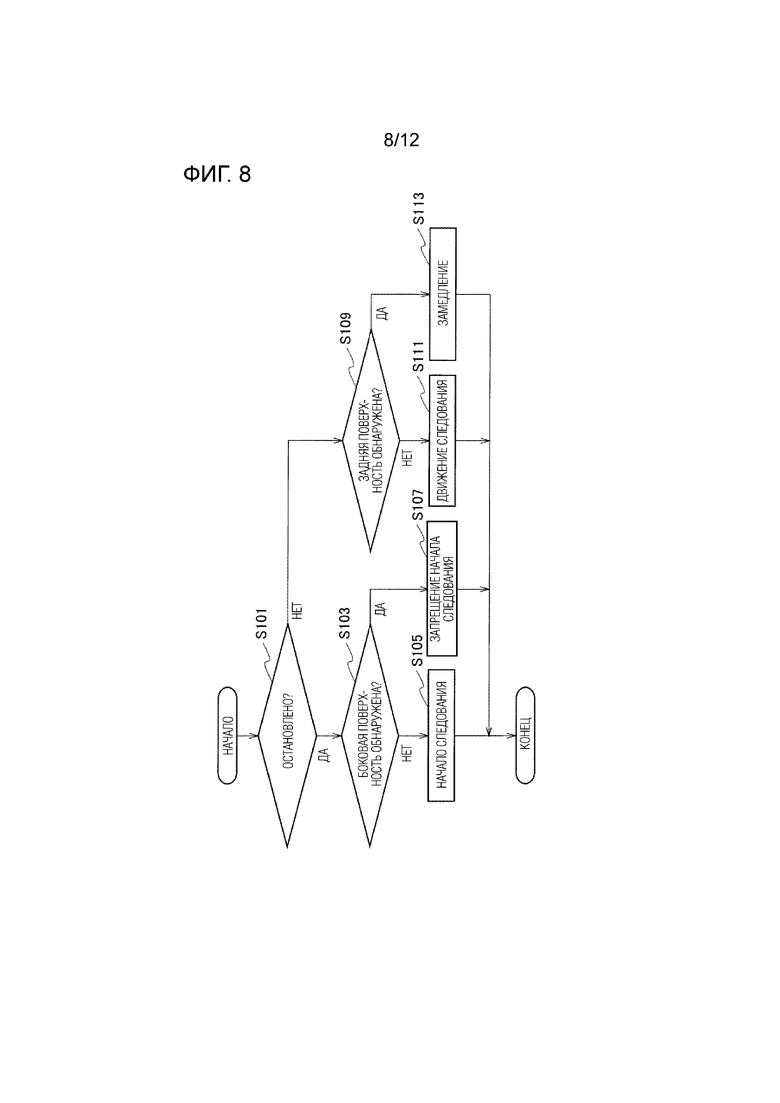
[0042] На этапе S101 блок 24 определения остановки использует скорость рассматриваемого транспортного средства 40, измеренную датчиком 13 скорости транспортного средства, чтобы определить, остановилось ли рассматриваемое транспортное средство 40. Если скорость рассматриваемого транспортного средства 40 составляет 0 км/ч (ДА на этапе S101), процесс переходит к этапу S103. Когда скорость рассматриваемого транспортного средства 40 не равна 0 км/ч (НЕТ на этапе S101), процесс переходит к этапу S109.
[0043] На этапе S103 модуль 25 определения встраивания вычисляет площадь боковой поверхности 60 другого транспортного средства 42, полученную с камеры 10. Если площадь боковой поверхности 60 превышает или равна заданному значению (ДА на этапе S103), блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось между рассматриваемым транспортным средством 40 и находящимся впереди транспортным средством 41. Затем процесс переходит к этапу S107, и блок 23 движения следования запрещает начало следования. Если, с другой стороны, площадь боковой поверхности 60 меньше заданного значения (НЕТ на этапе S103), блок 25 определения встраивания определяет, что встраивание не произошло. Затем процесс переходит к этапу S105, и блок 23 движения следования автоматически начинает движение рассматриваемого транспортного средства 40.
[0044] На этапе S109 блок 25 определения встраивания вычисляет площадь задней поверхности 50 другого транспортного средства 42, полученную с камеры 10. Если площадь задней поверхности 50 превышает или равна заданному значению (ДА на этапе S109), блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось между рассматриваемым транспортным средством 40 и находящимся впереди транспортным средством 41. Затем процесс переходит к этапу S113, и контроллер 20 выдает предупреждение пользователю, замедляет рассматриваемое транспортное средство 40 и т.п. Если, с другой стороны, площадь задней поверхности 50 меньше заданного значения (НЕТ на этапе S109), блок 25 определения встраивания определяет, что встраивание не произошло. Затем процесс переходит к этапу S111, и блок 23 движения следования заставляет рассматриваемое транспортное средство 40 следовать за находящимся впереди транспортным средством 41.
[0045] (Действие и эффекты)
Как описано выше, следующие действия и эффекты могут быть достигнуты с помощью устройства 1 помощи при вождении согласно настоящему варианту осуществления.
[0046] Контроллер 20 устанавливает поле обнаружения (области R1-R3) датчика (камеры 10) для обнаружения другого транспортного средства 42 между рассматриваемым транспортным средством 40 и находящимся впереди транспортным средством 41. Если рассматриваемое транспортное средство 40 движется и следует за находящимся впереди транспортным средством 41, а площадь задней поверхности 50 другого транспортного средства 42, обнаруженная в поле обнаружения, превышает или равна заданному значению, контроллер 20 определяет, что другое транспортное средство 42 встроилось между находящимся впереди транспортным средством 41 и рассматриваемым транспортным средством 40. Поле обнаружения устанавливается между рассматриваемым транспортным средством 40 и находящимся впереди транспортным средством 41.
[0047] Если рассматриваемое транспортное средство 40 остановлено и площадь боковой поверхности 60 другого транспортного средства 42, обнаруженная в поле обнаружения, превышает или равна заданному значению, контроллер 20 определяет, что другое транспортное средство 42 встроилось между находящимся впереди транспортным средством 41 и рассматриваемым транспортным средством 40. Как описано выше, из-за разницы в характеристиках между состояниями движения и остановки (разный угол входа), когда рассматриваемое транспортное средство 40 остановлено, боковая поверхность 60 другого транспортного средства 42, входящая в поле обнаружения, легче обнаруживается посредством камеры 10. Кроме того, боковая поверхность 60 другого транспортного средства 42 входит в поле обнаружения перед задней поверхностью 50. Путем определения встраивания посредством боковой поверхности 60 можно быстрее обнаруживать встраивание, когда рассматриваемое транспортное средство 40 остановлено, в отличие от того, когда рассматриваемое транспортное средство 40 движется.
[0048] Контроллер 20 может определять, находится ли рассматриваемое транспортное средство 40 на дороге только для автомобилей, на основе информации о местоположении рассматриваемого транспортного средства 40. Дорога только для автомобилей определяется в Японии как дорога, предназначенная для исключительного использования автомобилей, по которой разрешено движение только тем автомобилям, которые назначены администратором дороги. Репрезентативная автомобильная дорога - это скоростная автомагистраль. Блок 25 определения встраивания может определять встраивание только тогда, когда определяется, что рассматриваемое транспортное средство 40 находится на дороге, предназначенной только для автомобилей. Путем определения встраиваний только на прямых дорогах или кривых дорогах с ограниченной кривизной, таких как дороги только для автомобилей, можно предотвратить ошибочные определения встраиваний.
[0049] Если встраивание другого транспортного средства 42 обнаруживается, когда рассматриваемое транспортное средство 40 движется и следует за находящимся впереди транспортным средством 41, контроллер 20 выдает предупреждение пользователю, замедляет рассматриваемое транспортное средство 40 и т.п. Если встраивание другого транспортного средства 42 обнаруживается, когда рассматриваемое транспортное средство 40 остановлено, блок 23 движения следования запрещает рассматриваемому транспортному средству 40 начать движение и следовать за находящимся впереди транспортным средством 41. Посредством настоящего варианта осуществления, поскольку встраивание может быть быстро обнаружено, внезапное торможение уменьшается. Кроме того, можно предотвратить начало следования.
[0050] (Модифицированный пример 1)
Будет описан другой пример способа определения блока 25 определения встраивания.
[0051] Когда рассматриваемое транспортное средство 40 движется и следует за находящимся впереди транспортным средством 41, блок 25 определения встраивания может определять наличие или отсутствие встраивания на основе изменений задней поверхности находящегося впереди транспортного средства 41, зафиксированных в изображение с камеры. Если другое транспортное средство 42 встраивается, часть задней поверхности находящегося впереди транспортного средства 41 закрывается другим транспортным средством 42, как это видно камерой 10. В результате происходит изменение изображения задней поверхности находящегося впереди транспортного средства 41. Если происходит изменение изображения задней поверхности находящегося впереди транспортного средства 41, блок 25 определения встраивания может определить, что другое транспортное средство 42 встроилось между находящимся впереди транспортным средством 41 и рассматриваемым транспортным средством 40.
[0052] Если рассматриваемое транспортное средство 40 остановлено позади находящегося впереди транспортного средства 41 и расстояние от передней части другого транспортного средства 42 до рассматриваемого транспортного средства 40 обнаружено в поле обнаружения камеры 10 (области R1-R3, показанные на фиг.5 -7) меньше или равно заданному значению, модуль 25 определения встраивания может определить, что другое транспортное средство 42 встроилось между находящимся впереди транспортным средством 41 и рассматриваемым транспортным средством 40. Расстояние от передней части другого транспортного средства 42 до рассматриваемого транспортного средства 40 означает кратчайшее расстояние между рассматриваемым транспортным средством 40 и бампером другого транспортного средства 42. Кроме того, указанное здесь заданное значение (пятое заданное значение) отличается от заданного значения (четвертого заданного значения), которое использовалось при сравнении с боковой поверхностью 60. Определив это расстояние, можно быстро обнаружить встраивание.
[0053] (Модифицированный пример 2)
Блок 25 определения встраивания может определять встраивание другого транспортного средства 42 в соответствии со степенью входа другого транспортного средства 42 в поле обнаружения камеры 10. Степень входа в поле обнаружения определяется как область перекрытия другого транспортного средства 42 с полем обнаружения. Область перекрытия другого транспортного средства 42 с полем обнаружения определяется как область перекрытия другого транспортного средства 42, если смотреть непосредственно сверху.
[0054] Если рассматриваемое транспортное средство 40 движется и определяется, что степень входа другого транспортного средства 42 в поле обнаружения превышает или равна заданному значению (первому заданному значению), блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось перед рассматриваемым транспортным средством 40. Кроме того, если рассматриваемое транспортное средство 40 остановлено и определено, что степень входа другого транспортного средства 42 в поле обнаружения превышает или равна второму заданному значению, которое меньше первого заданного значения, блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось перед рассматриваемым транспортным средством 40. Конкретные примеры будут описаны со ссылкой на фиг. 2 и 5.
[0055] Обратите внимание на местоположение P5 на фиг. 2 и местоположение P4 на фиг. 5. Степень входа другого транспортного средства 42 в поле обнаружения (область R1) в местоположении P5 на фиг. 2 составляет около 50% от общей площади, если смотреть сверху. А степень входа другого транспортного средства 42 в поле обнаружения (область R1) в местоположении P4 на фиг.5 составляет приблизительно 10% от общей площади, если смотреть сверху. В модифицированном примере 2, если рассматриваемое транспортное средство 40 движется и определено, что степень входа другого транспортного средства 42 в поле обнаружения (область R1) превышает или равна первому заданному значению (50%, в качестве одного примера), блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось перед рассматриваемым транспортным средством 40. С другой стороны, если рассматриваемое транспортное средство 40 остановлено и определено, что степень входа другого транспортного средства 42 в поле обнаружения (область R1) превышает или равна второму заданному значению (10%, в качестве одного примера), меньше, чем первое заданное значение, блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось перед рассматриваемым транспортным средством 40. Вышеописанные числовые значения 50% и 10% являются просто примерами и они не ограничены. Пока выполняется условие, что второе заданное значение меньше, чем первое заданное значение, числовые значения первого заданного значения и второго заданного значения могут быть любыми.
[0056] Посредством модифицированного примера 2 становится возможным обнаруживать другое транспортное средство 42, которое может встраиваться перед рассматриваемым транспортным средством 40, когда рассматриваемое транспортное средство 40 остановлено. Кроме того, пороговое значение для определения встраивания другого транспортного средства 42 меньше, когда рассматриваемое транспортное средство 40 остановлено, в отличие от того, когда рассматриваемое транспортное средство 40 движется. То есть, поскольку второе заданное значение меньше, чем первое заданное значение, встраивание может быть быстрее обнаружено, когда рассматриваемое транспортное средство 40 остановлено, в отличие от того, когда рассматриваемое транспортное средство 40 движется. Установка второго заданного значения меньше первого заданного значения аналогичным образом применяется в описанном выше варианте осуществления, модифицированном примере 1 и модифицированном примере 3, описанных ниже. То есть в варианте осуществления, описанном выше, контроллер 20 устанавливает первое заданное значение на третье заданное значение, которое представляет собой площадь задней поверхности другого транспортного средства 42, обнаруженной с помощью поля обнаружения, и устанавливает второе заданное значение на четвертое заданное значение, которое представляет собой площадь боковой поверхности другого транспортного средства 42, обнаруженной в поле обнаружения.
[0057] (Модифицированный пример 3)
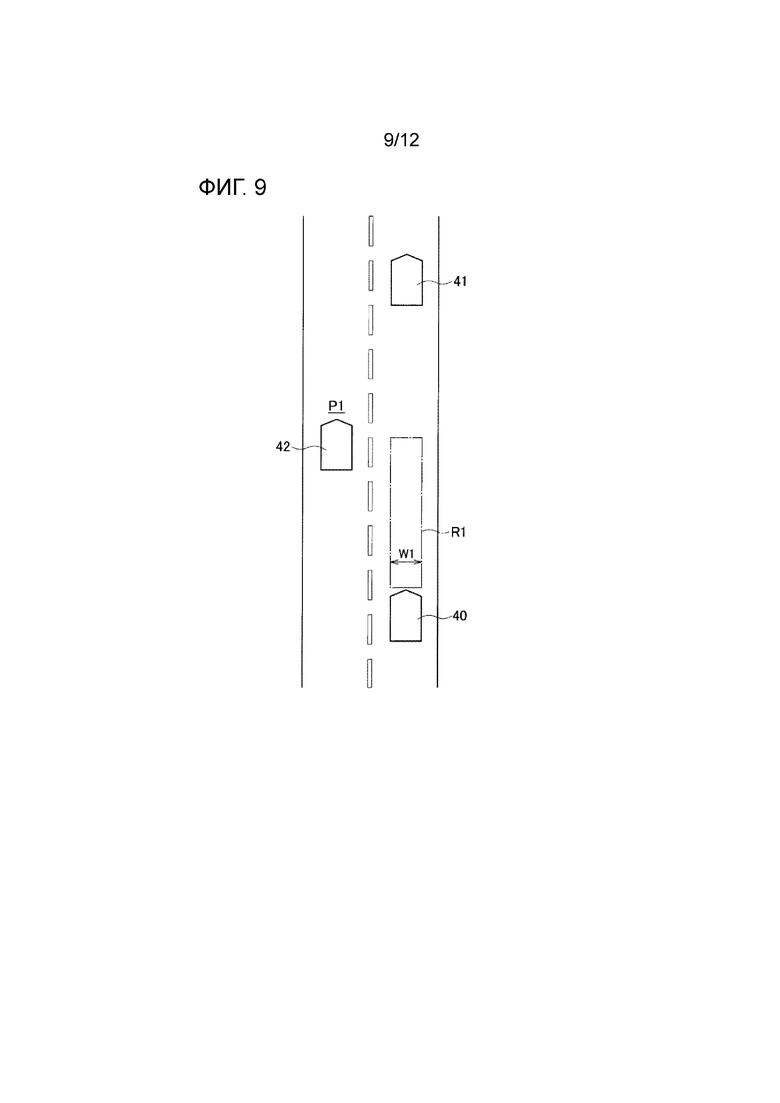
В сценарии на фиг. 2 длина области R1 описывалась как расстояние в направлении движения от переднего конца рассматриваемого транспортного средства 40 до заднего конца находящегося впереди транспортного средства 41. Однако длина области R1 этим не ограничивается. Как показано на фиг.9, длина области R1 может быть расстоянием в направлении движения, которое не достигает заднего конца находящегося впереди транспортного средства 41. Однако длина области R1 предпочтительно больше, чем расстояние в направлении движения, на котором срабатывает аварийное торможение с помощью функции автономного вождения. Таким образом, становится возможным обнаружение встраивания до того, как будет задействовано аварийное торможение.
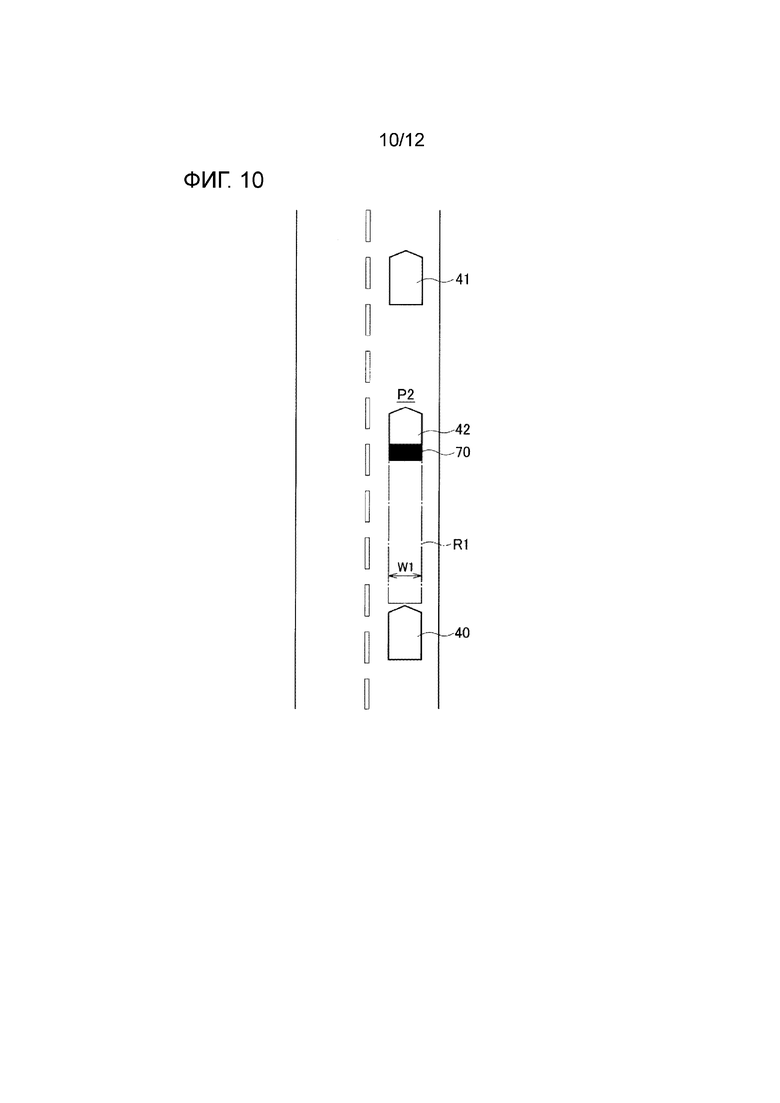
[0058] Теперь будет описан способ определения встраивания, когда область R1 такая, как показано на фиг.9. Сценарий, показанный на фиг.10, отображает сценарий фиг.9 в последующее время. В сценариях на фиг. 9-10 рассматриваемое транспортное средство 40 движется. Как показано на фиг.10, когда рассматриваемое транспортное средство 40 движется и определяется, что площадь задней поверхности другого транспортного средства 42, обнаруженная в пределах области R1, превышает или равна заданному значению (шестому заданному значению), блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось перед рассматриваемым транспортным средством 40. Площадь задней поверхности другого транспортного средства 42, обнаруженная в пределах области R1, означает область перекрытия другого транспортного средства 42 с площадью R1, как описано в Модифицированном примере 2.
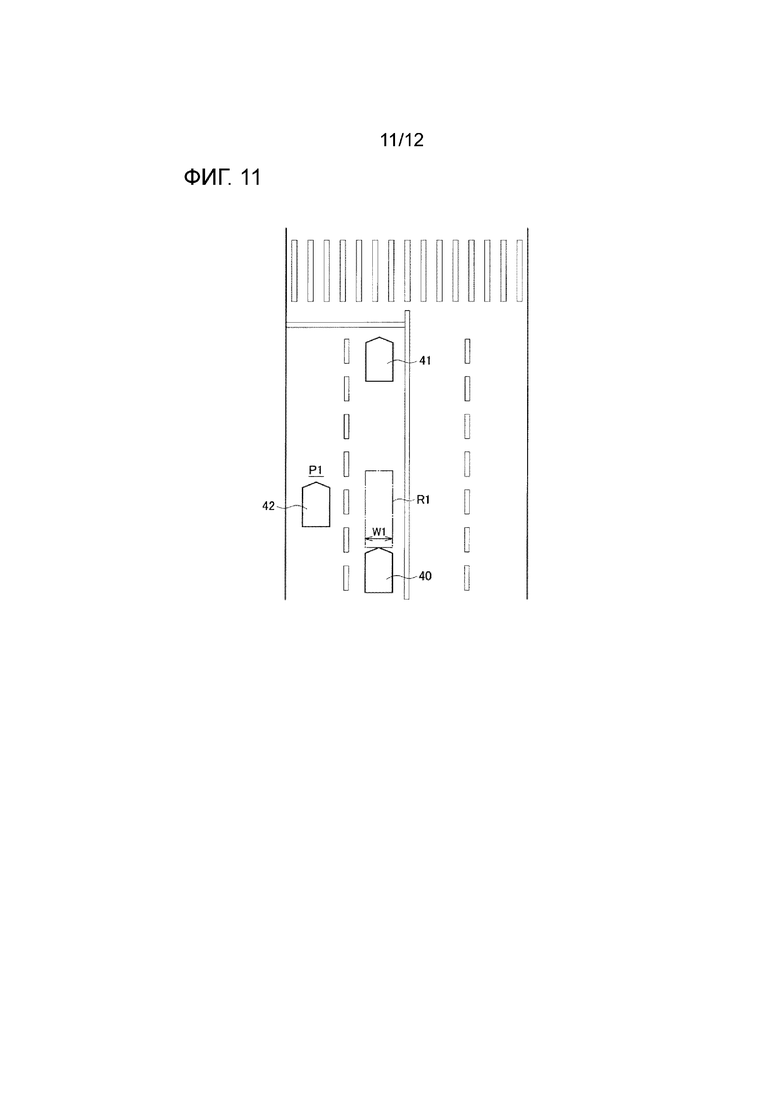
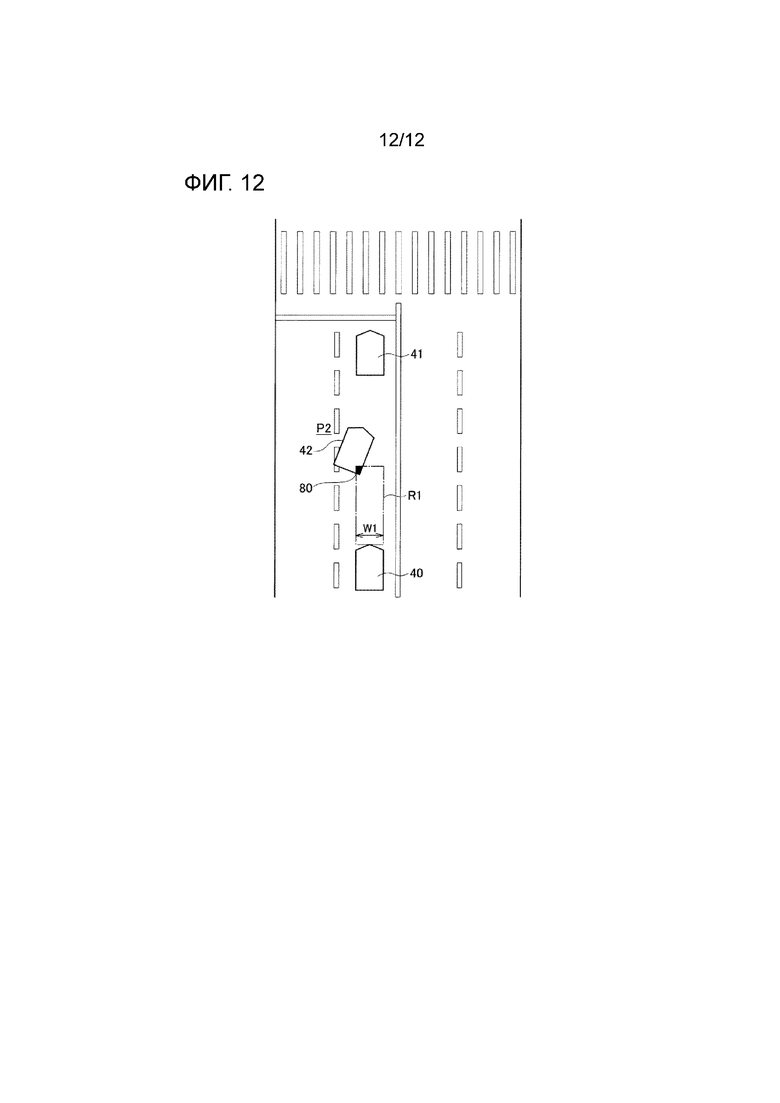
[0059] Как показано на фиг.11, длина области R1 в направлении движения, когда рассматриваемое транспортное средство 40 остановлено, также может быть длиной, что не достигает заднего конца находящегося впереди транспортного средства 41, таким же образом, как на фиг.9. Однако на фиг.11, как и на фиг.9, длина области R1 в направлении движения предпочтительно больше, чем расстояние, на котором задействуется аварийное торможение с помощью функции автономного вождения. Теперь будет описан способ определения встраивания, когда область R1 имеет вид, показанный на фиг.11. Сценарий, показанный на фиг.11, представляет собой сценарий, показанный на фиг.12 в последующее время. В сценариях на фиг. 11-12 рассматриваемое транспортное средство 40 остановлено. Как показано на фиг.12, когда рассматриваемое транспортное средство 40 остановлено и определяется, что площадь задней поверхности другого транспортного средства 42, обнаруженная в пределах области R1, превышает или равна седьмому заданному значению, которое меньше шестого заданного значения, Блок 25 определения встраивания определяет, что другое транспортное средство 42 встроилось перед рассматриваемым транспортным средством 40. Площадь задней поверхности другого транспортного средства 42, обнаруженная в пределах области R1, означает область перекрытия другого транспортного средства 42 с площадью R1, как описано в Модифицированном примере 2.
[0060] Посредством модифицированного примера 3 становится возможным обнаруживать, когда другое транспортное средство 42 может встраиваться перед рассматриваемым транспортным средством 40, когда рассматриваемое транспортное средство 40 остановлено. Кроме того, пороговое значение для определения встраивания другого транспортного средства 42 меньше, когда рассматриваемое транспортное средство 40 остановлено, в отличие от того, когда рассматриваемое транспортное средство 40 движется. То есть, поскольку седьмое заданное значение меньше шестого заданного значения, встраивание может быть обнаружено быстрее, когда рассматриваемое транспортное средство 40 остановлено, в отличие от того, когда рассматриваемое транспортное средство 40 движется.
[0061] Каждая из функций, описанных в вариантах осуществления выше, может быть реализована посредством одной или более схем обработки. Схемы обработки включают в себя запрограммированные устройства обработки, такие как устройства обработки, включающие в себя электронные схемы. Кроме того, схемы обработки включают в себя такие устройства, как компоненты схем и специализированные интегральные схемы (ASIC), предназначенные для выполнения описанных функций.
[0062] Варианты осуществления настоящего изобретения были описаны выше, но описания и фигуры, которые составляют часть этого раскрытия, не следует понимать как ограничивающие настоящее изобретение. Из этого раскрытия для специалистов в данной области техники должны быть очевидны различные альтернативные варианты осуществления, примеры и способы работы.
[0063] Когда рассматриваемое транспортное средство 40 остановлено, разметка полосы движения (так называемые белые линии) может не обнаруживаться из-за транспортных средств, находящихся поблизости от рассматриваемого транспортного средства 40. В таких случаях контроллер 20 может установить поле обнаружения камеры 10 с использованием виртуальной разметки полосы движения на основе прошлых результатов обнаружения. Ширина полосы движения для виртуальной разметки полосы движения может быть шириной транспортного средства у рассматриваемого транспортного средства 40, полученной путем добавления запаса к ширине транспортного средства у рассматриваемого транспортного средства 40, или может быть шириной в соответствии с типом дороги.
[0064] Блок 25 определения встраивания может определять встраивание на основе площади боковой поверхности другого транспортного средства 42. Например, когда рассматриваемое транспортное средство 40 движется и определяется, что площадь боковой поверхности другого транспортного средства 42, которая перекрывается в поле обнаружения, превышает или равна заданному значению (восьмому заданному значению), может быть определено, что другое транспортное средство 42 встроилось перед рассматриваемым транспортным средством 40. Кроме того, когда рассматриваемое транспортное средство 40 остановлено и площадь боковой поверхности другого транспортного средства 42, которая перекрывает поле обнаружения, превышает или равна девятому заданному значению, которое меньше восьмого заданного значения, блок 25 определения встраивания может определить, что другое транспортное средство 42 встроилось перед рассматриваемым транспортным средством 40. В результате становится возможным быстрее обнаруживать встраивание, когда рассматриваемое транспортное средство 40 остановлено, в отличие от того, когда рассматриваемое транспортное средство 40 движется.
[0065] Настоящее изобретение может применяться независимо от наличия или отсутствия находящегося впереди транспортного средства 41. Таким образом, устройство помощи при вождении согласно настоящему изобретению может обнаруживать другое транспортное средство, которое встроилось перед рассматриваемым транспортным средством 40 в полосу движения, по которой движется рассматриваемое транспортное средство 40, независимо от наличия или отсутствия находящегося впереди транспортного средства 41.
Описания ссылочных позиций
[0066] 1 устройство помощи при вождении
10 Камера
11 Радар
12 Сонар
13 Датчик скорости транспортного средства
14 GPS-приемник
15 Переключатели
20 Контроллер
21 Блок обнаружения полосы движения
22 Блок обнаружения находящегося впереди транспортного средства
23 Блок движения следования
24 Блок определения остановки
25 Блок определения встраивания
30 Привод рулевого управления
31 Привод педали акселератора
32 Привод тормоза
Изобретение относится к помощникам при вождении ТС. В способе помощи при вождении с использованием контроллера, который использует датчик для обнаружения другого ТС, которое встраивается перед рассматриваемым ТС, устанавливают поле обнаружения датчика перед рассматриваемым ТС и определяют, что другое ТС встроилось перед рассматриваемым ТС, когда рассматриваемое ТС движется. Также определяют превышение степени вхождения другого ТС в поле обнаружения, первому заданному значению. Определяют, что другое ТС встроилось перед рассматриваемым ТС, когда рассматриваемое ТС остановлено, и упомянутая степень превышает или равна второму заданному значению, которое меньше первого заданного значения. Решение направлено на обнаружение встраивающегося ТС. 2 н. и 4 з.п. ф-лы, 12 ил.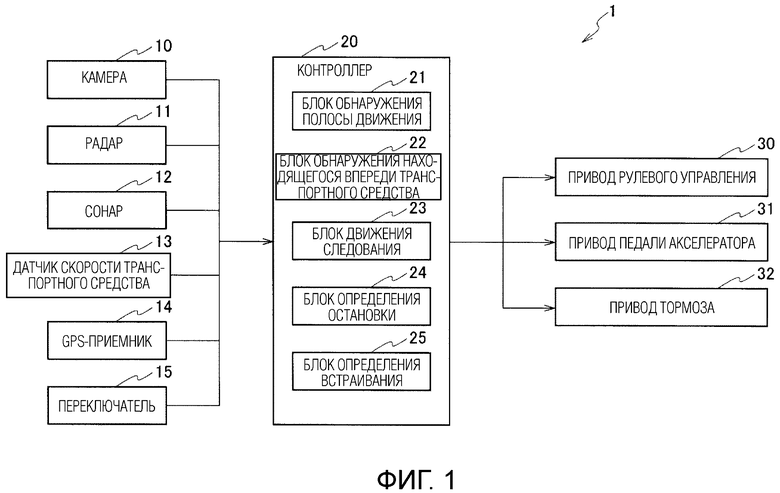
1. Способ помощи при вождении с использованием контроллера, который использует датчик для обнаружения другого транспортного средства, которое встраивается перед рассматриваемым транспортным средством в полосе движения, по которой движется рассматриваемое транспортное средство, содержащий этапы, на которых:
контроллером
устанавливают поле обнаружения датчика перед рассматриваемым транспортным средством,
определяют, что другое транспортное средство встроилось перед рассматриваемым транспортным средством, когда рассматриваемое транспортное средство движется, и степень, в которой другое транспортное средство вошло в поле обнаружения, превышает или равна первому заданному значению, и
определяют, что другое транспортное средство встроилось перед рассматриваемым транспортным средством, когда рассматриваемое транспортное средство остановлено, и упомянутая степень превышает или равна второму заданному значению, которое меньше первого заданного значения.
2. Способ помощи при вождении по п.1, в котором
контроллер
управляет рассматриваемым транспортным средством, чтобы следовать за находящимся впереди транспортным средством, которое опережает рассматриваемое транспортное средство,
устанавливает поле обнаружения датчика между рассматриваемым транспортным средством и находящимся впереди транспортным средством,
устанавливает первое заданное значение на третье заданное значение, которое представляет собой площадь задней поверхности другого транспортного средства, обнаруженного в поле обнаружения, и
устанавливает второе заданное значение на четвертое заданное значение, которое представляет собой площадь боковой поверхности другого транспортного средства, обнаруженного в поле обнаружения.
3. Способ помощи при вождении по п.1, в котором
длина поля обнаружения в направлении движения рассматриваемого транспортного средства больше, чем расстояние, на котором экстренное торможение выполняется функцией автономного вождения.
4. Способ помощи при вождении по любому из пп. 1-3, в котором
получают информацию о местоположении рассматриваемого транспортного средства,
определяют, находится ли рассматриваемое транспортное средство на дороге только для автомобилей, на основе информации о местоположении, и
обнаруживают только другое транспортное средство, которое встроилось перед рассматриваемым транспортным средством, после определения того, что рассматриваемое транспортное средство движется по дороге только для автомобилей.
5. Способ помощи при вождении по любому из пп. 1-4, в котором
запрещают рассматриваемому транспортному средству начинать движение и следовать за находящимся впереди транспортным средством, когда обнаружено встраивание и рассматриваемое транспортное средство остановлено.
6. Устройство помощи при вождении, которое обнаруживает другое транспортное средство, которое встроилось перед рассматриваемым транспортным средством в полосу движения, по которой движется рассматриваемое транспортное средство, содержащее:
датчик, который обнаруживает другое транспортное средство перед рассматриваемым транспортным средством; и
контроллер, который устанавливает поле обнаружения датчика, при этом
контроллер
определяет, что другое транспортное средство встроилось перед рассматриваемым транспортным средством, когда рассматриваемое транспортное средство движется, и степень, в которой другое транспортное средство вошло в поле обнаружения, превышает или равна первому заданному значению, и
определяет, что другое транспортное средство встроилось перед рассматриваемым транспортным средством, когда рассматриваемое транспортное средство остановлено, и упомянутая степень превышает или равна второму заданному значению, которое меньше первого заданного значения.
| JP 2016045709 A, 04.04.2016 | |||
| JP 2008117073 A, 22.05.2008 | |||
| JP 2010038731 A, 18.02.2010 | |||
| JP H11321379 A, 24.11.1999 | |||
| JP 2004082942 A, 18.03.2004. |

