[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к способу сохранения картографических данных и устройству сохранения картографических данных.
[Уровень техники]
[0002]
Известен способ обновления карты, сохранённой в навигационном устройстве (см., например, Патентный документ 1: WO2016/067849). Этот способ включает в себя создание разностных данных между картографическими данными, к которым в данный момент обращается навигационное устройство, и картографическими данными новейшего поколения, обновление картографических данных на основании разностных данных и запись обновленных картографических данных в области, отличные от областей, в которых сохранены картографические данные до обновления. Если в обновленных картографических данных возникает какая–либо проблема, можно обратиться к картографическим данным до обновления.
[Документ из уровня техники]
[Патентный Документ]
[0003]
[Патентный документ 1] WO2016/067849
[Раскрытие изобретения]
[Проблемы, решаемые изобретением]
[0004]
Однако способ, описанный в патентном документе 1, может применяться только к содержимому картографических данных в определенном формате, и если имеется содержимое картографических данных в формате другого типа, содержимое картографических данных, используемое в рассматриваемом транспортном средстве, не может быть отредактировано.
[0005]
Задача, которая должна быть решена с помощью настоящего изобретения, состоит в создании способа сохранения картографических данных и устройства сохранения картографических данных, с помощью которых, даже когда содержимое картографических данных получено в формате, отличном от того, который используется в рассматриваемом транспортном средстве, содержимое картографических данных, используемое в рассматриваемом транспортном средстве, может быть отредактировано на основании полученного содержимого картографических данных.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает вышеупомянутую проблему путем преобразования формата полученного содержимого картографических данных в заданный формат, который может использоваться в рассматриваемом транспортном средстве, сохранения содержимого картографических данных, преобразованного в заданный формат, в базе данных, получения информации обновления, относящейся к содержимому картографических данных, сохранённому в базе данных, и редактирование содержимого картографических данных в заданном формате, сохранённого в базе данных, на основании полученной информации обновления.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению, даже когда получено содержимое картографических данных в формате, отличном от того, который используется в рассматриваемом транспортном средстве, содержимое картографических данных, используемое в рассматриваемом транспортном средстве, может редактироваться на основании полученного содержимого картографических данных.
[Краткое описание чертежей]
[0008]
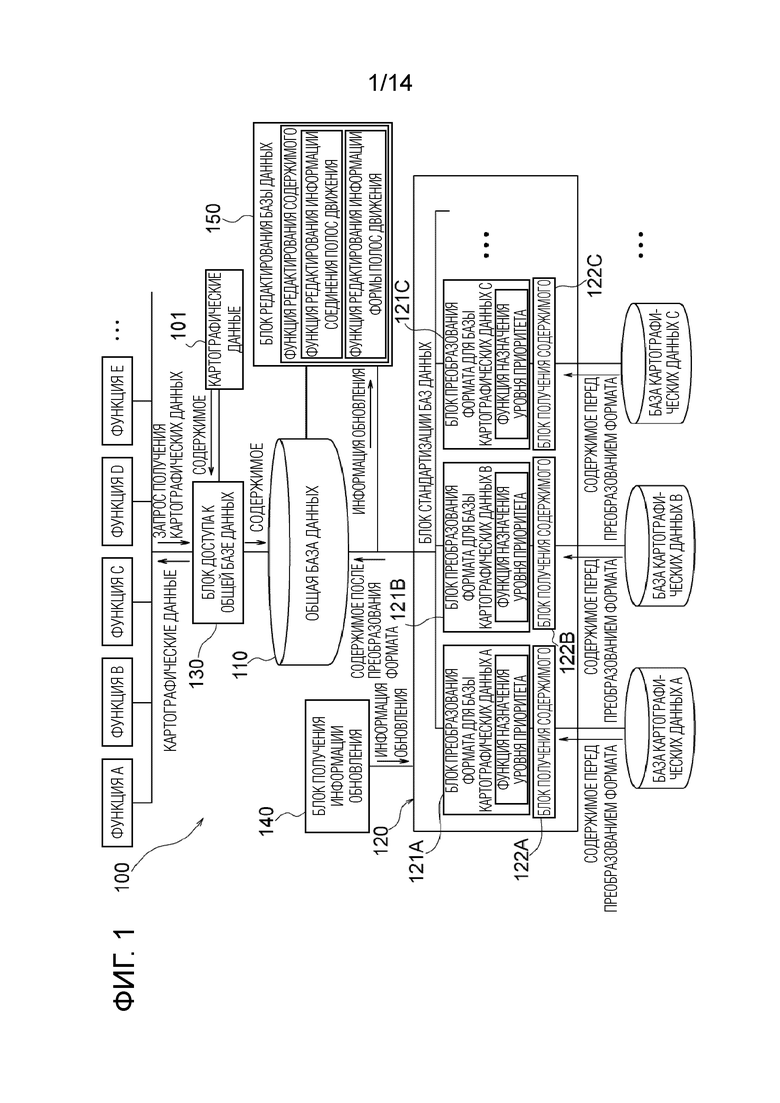
На фиг.1 показана блок–схема, иллюстрирующая схему устройства сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения.
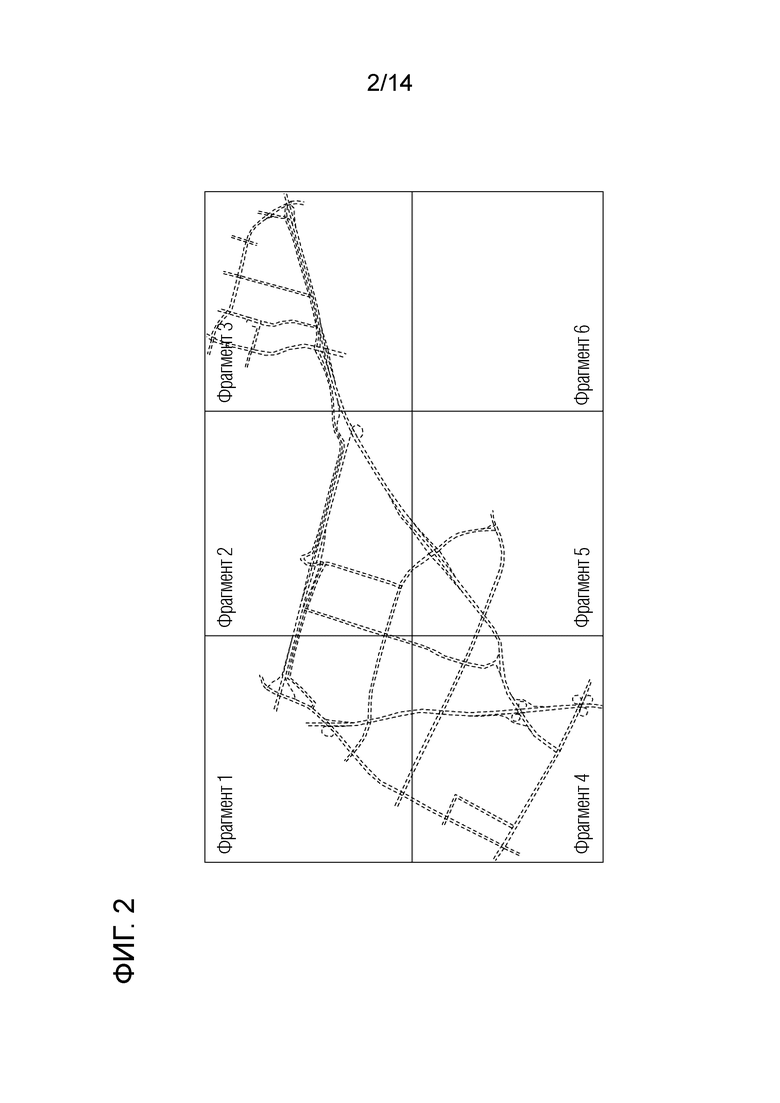
Фиг. 2 представляет собой схему для описания фрагментов карты.
Фиг. 3 – схема, иллюстрирующая изгиб дороги.
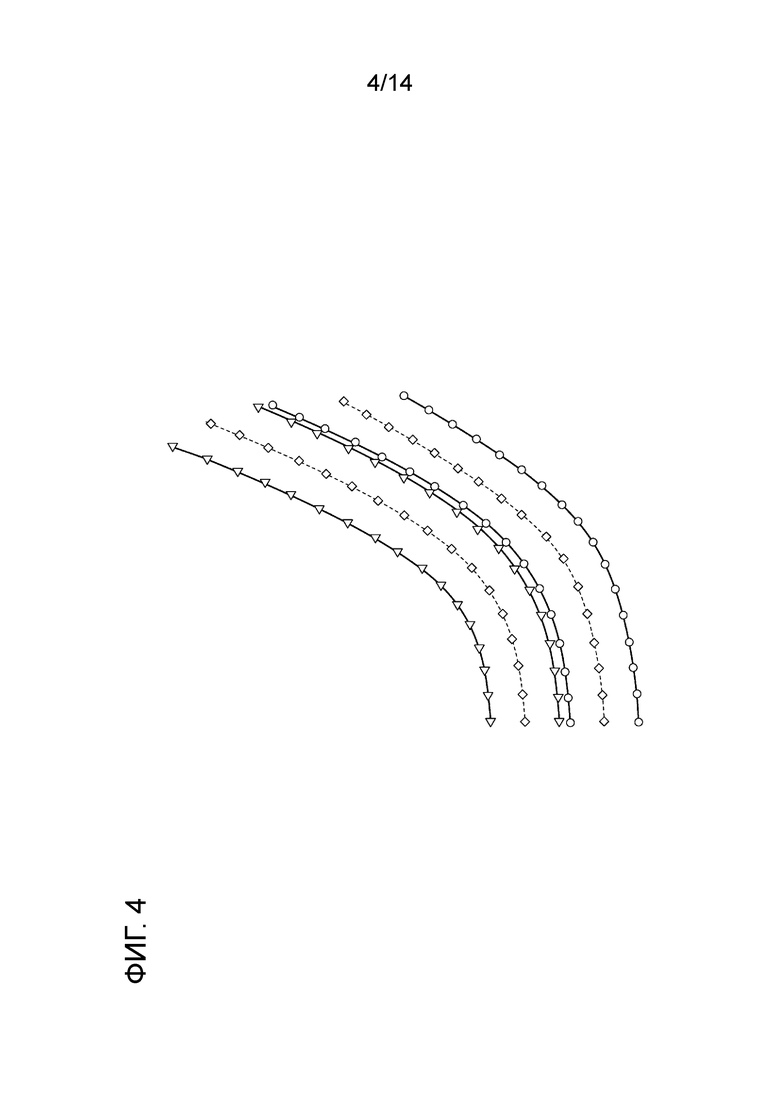
Фиг.4 – схема, иллюстрирующая пример формата линий границы полос движения и осевых линий полос движения по изгибу дороги.
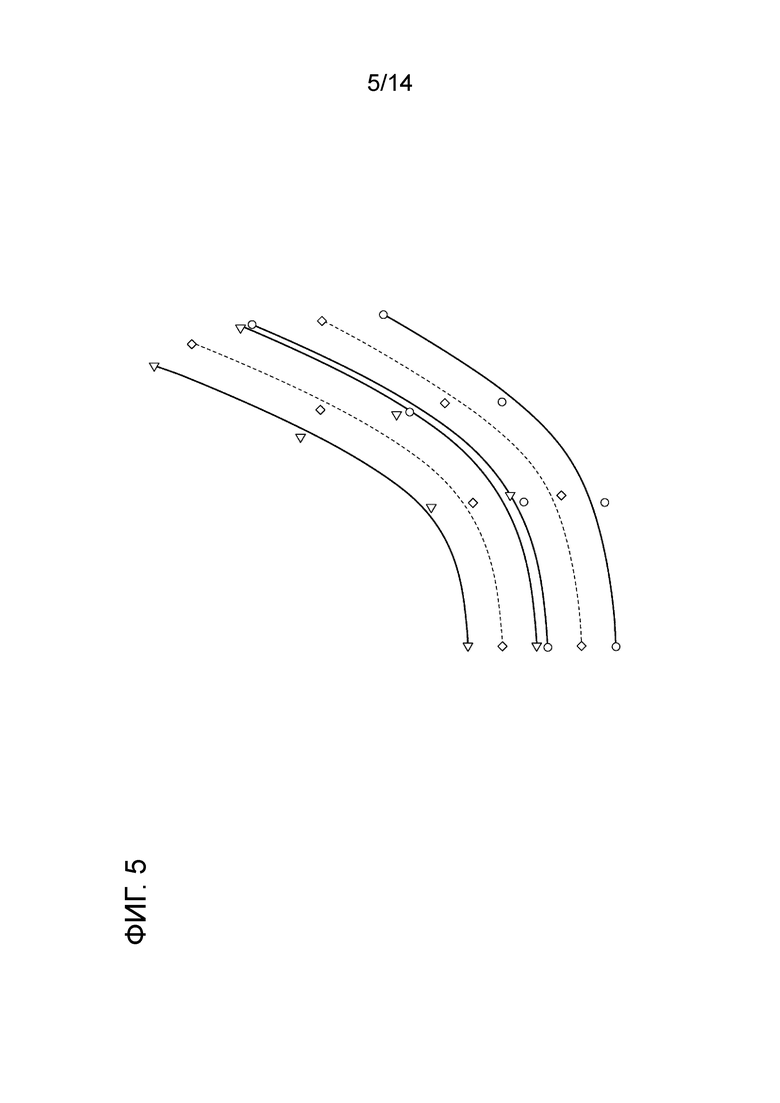
Фиг. 5 является схемой, иллюстрирующей пример формата линий границы полос движения и осевых линий полос движения по изгибу дороги.
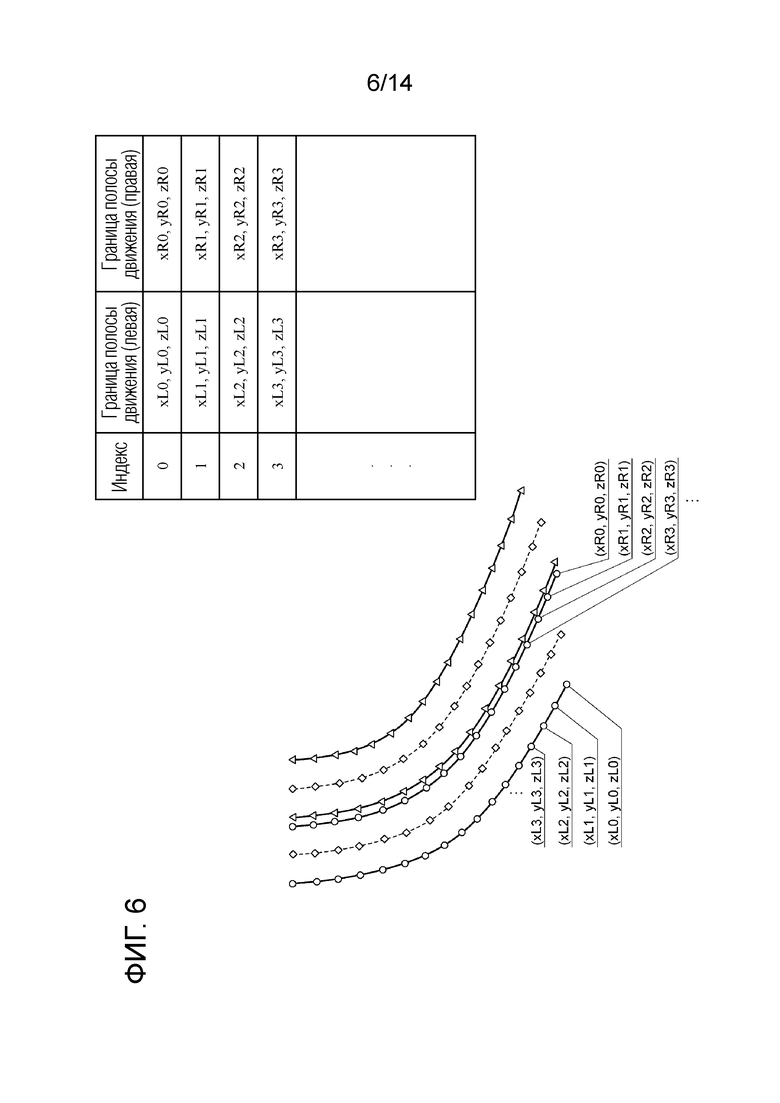
Фиг. 6 является схемой, иллюстрирующей линии границы полос движения как содержимое, которое должно быть сохранено в общей базе данных.
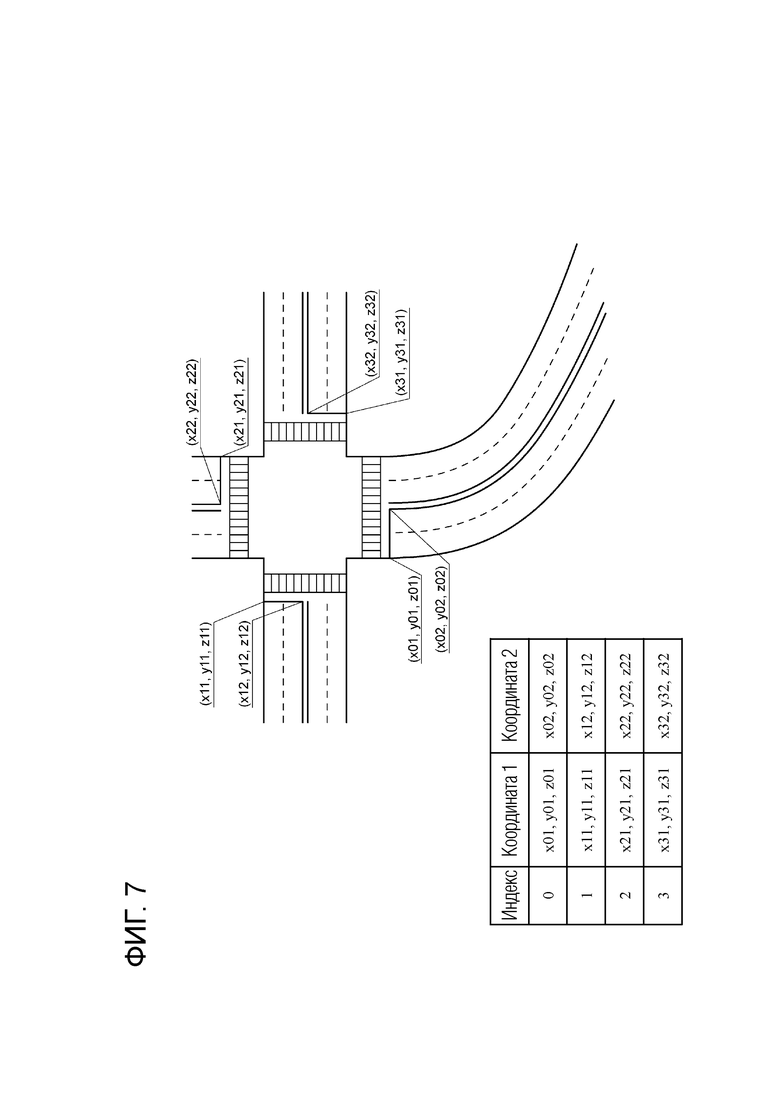
Фиг. 7 является схемой, иллюстрирующей линии остановки как содержимое, полученное из баз картографических данных A, B, C,….
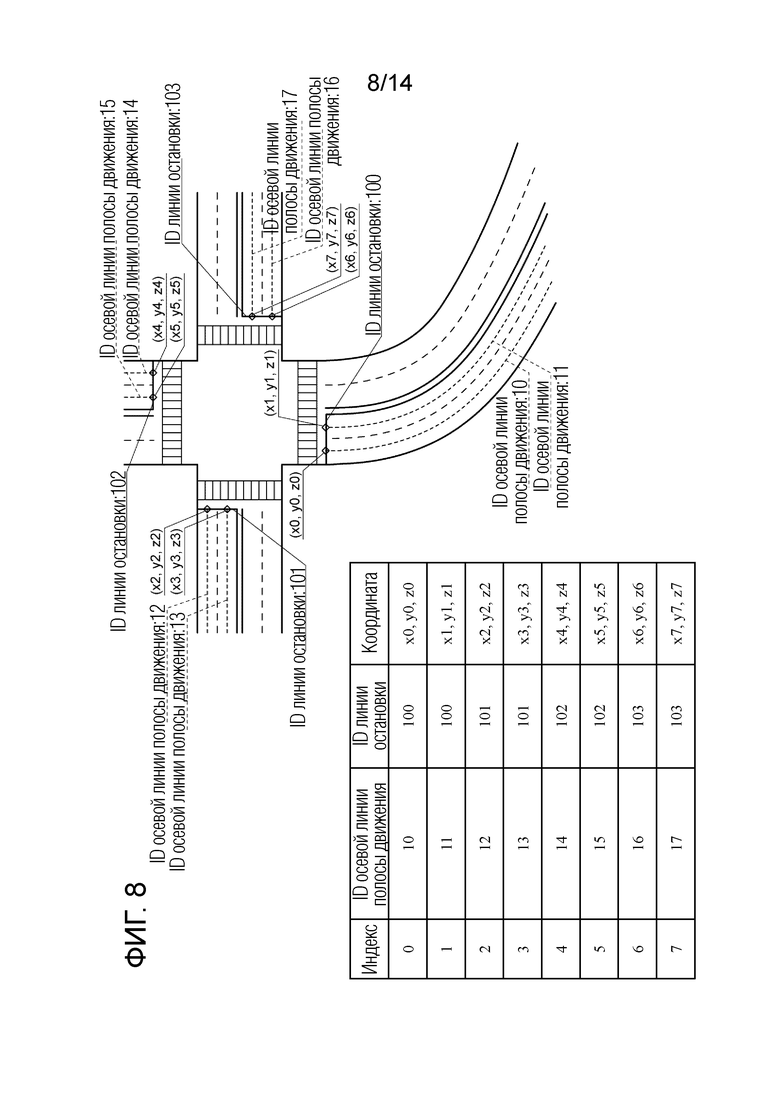
Фиг. 8 является схемой для описания информации об оставшемся расстоянии до достижения рассматриваемым транспортным средством линии остановки, причём упомянутое оставшееся расстояние должно быть сохранено в общей базе данных.
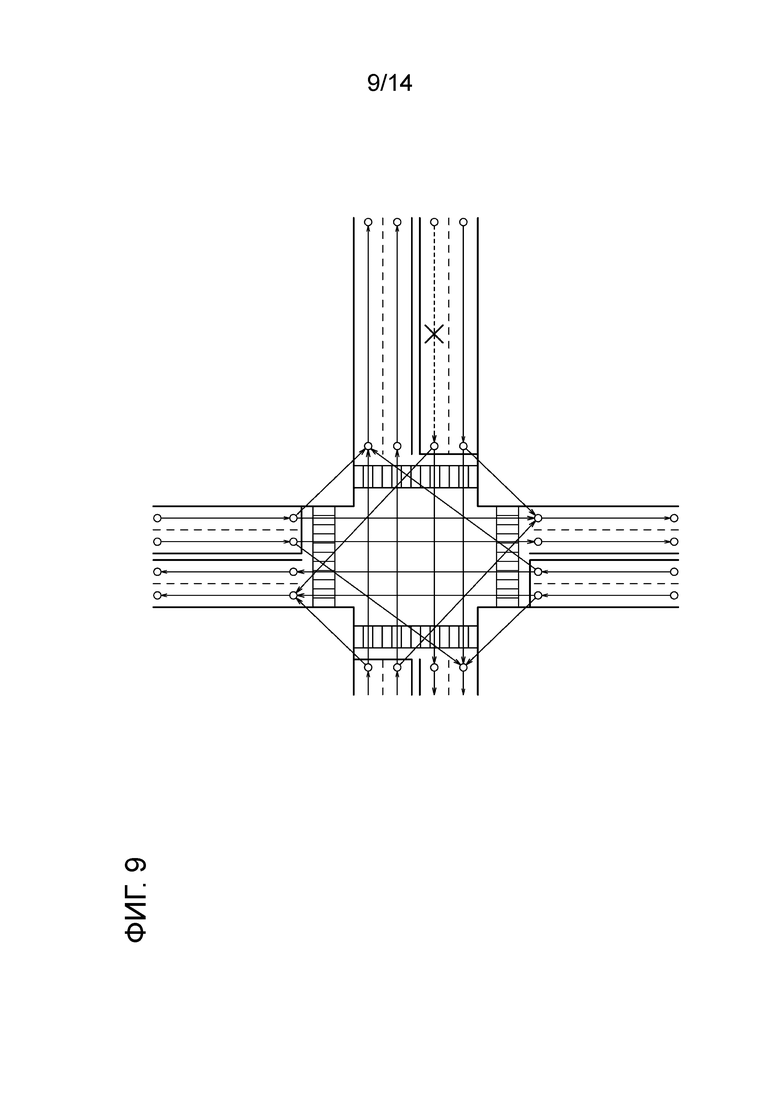
Фиг.9 – схема, иллюстрирующая пример редактирования полос, сохраненных в общей базе данных, когда информация обновления, полученная блоком получения информации обновления, включает в себя информацию о закрытии полосы.
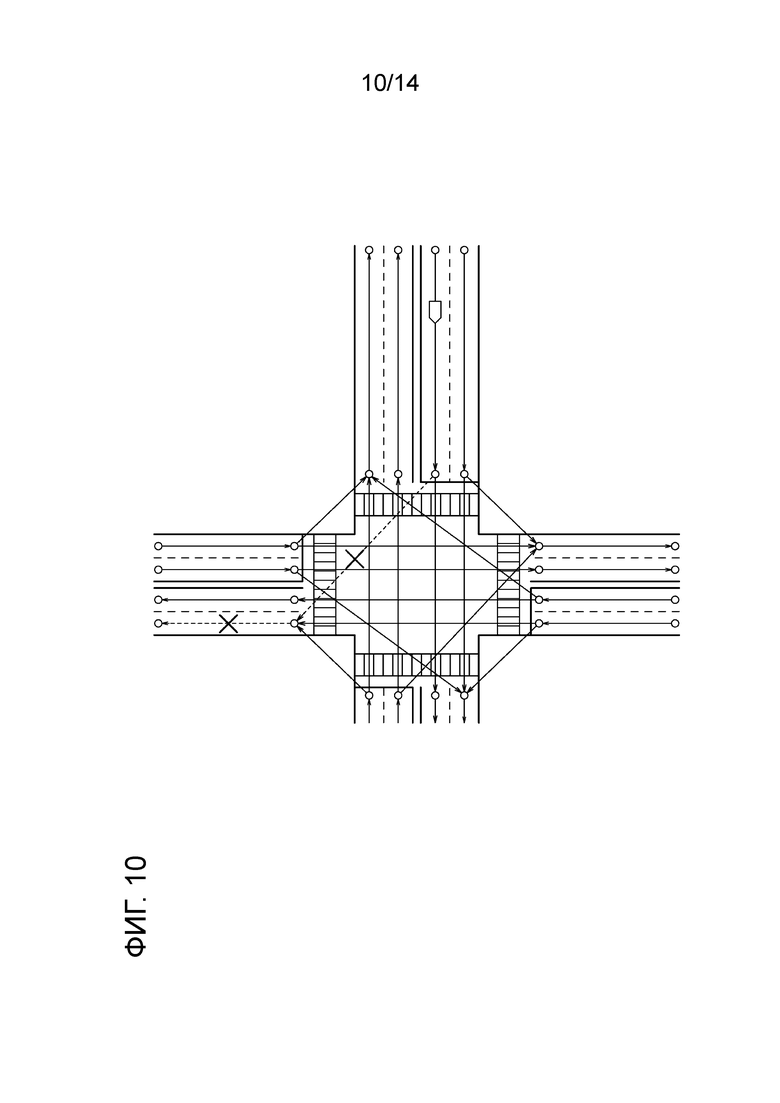
Фиг. 10 является схемой, иллюстрирующей пример редактирования полос, сохраненных в общей базе данных, когда информация обновления, полученная блоком получения информации обновления, включает в себя информацию о закрытии полосы.
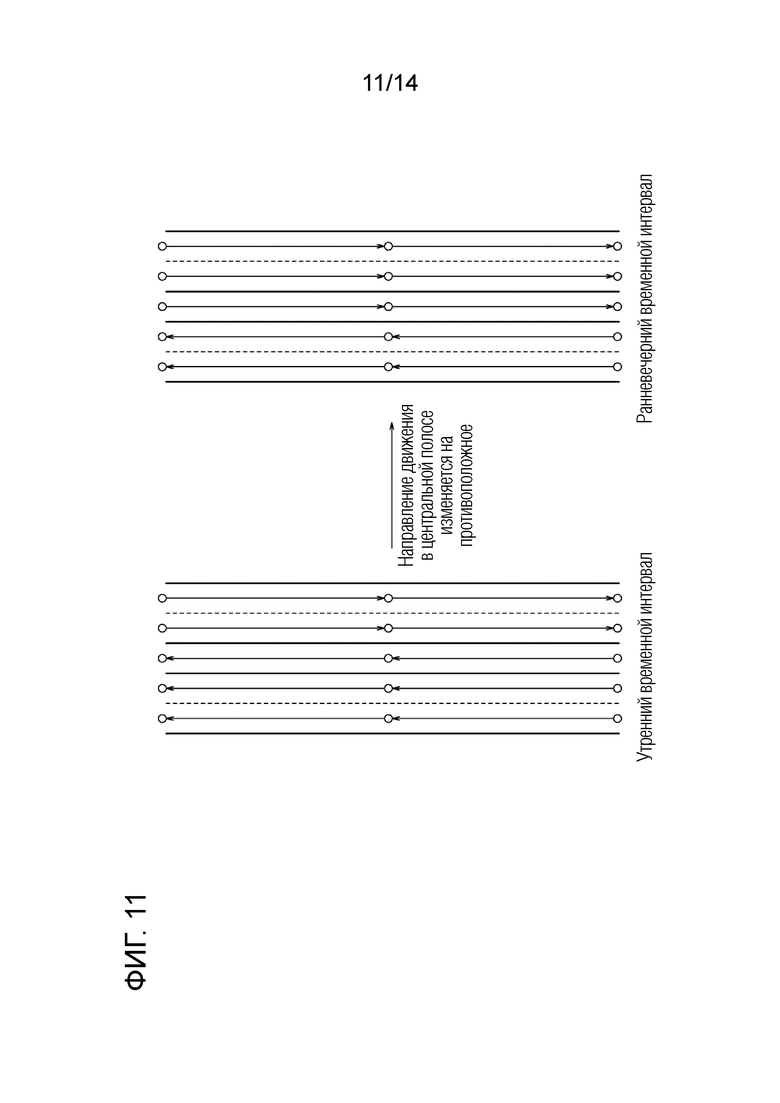
Фиг. 11 является схемой, иллюстрирующей пример редактирования полос, сохраненных в общей базе данных, когда информация обновления, полученная блоком получения информации обновления, является информацией, в которой направление движения в центральной полосе изменяется на противоположное в зависимости от временного интервала.
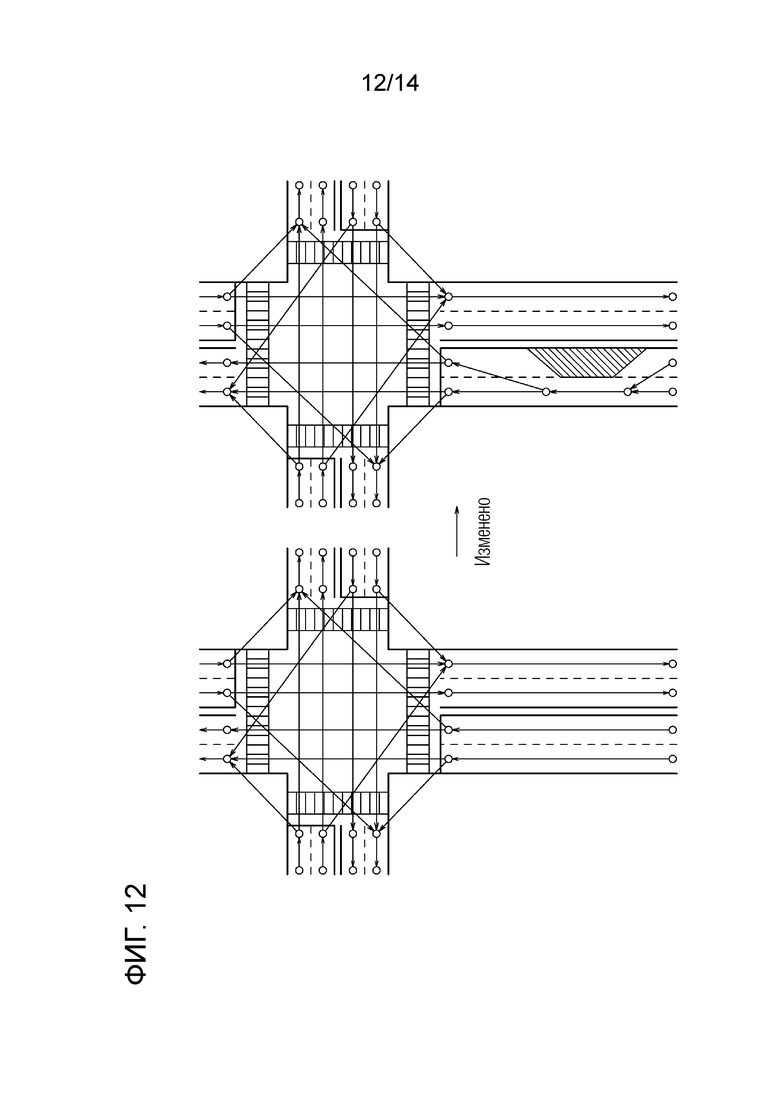
Фиг.12 – схема, иллюстрирующая пример редактирования полос, сохраненных в общей базе данных, когда информация обновления, полученная блоком получения информации обновления, включает в себя изменение формы полосы.
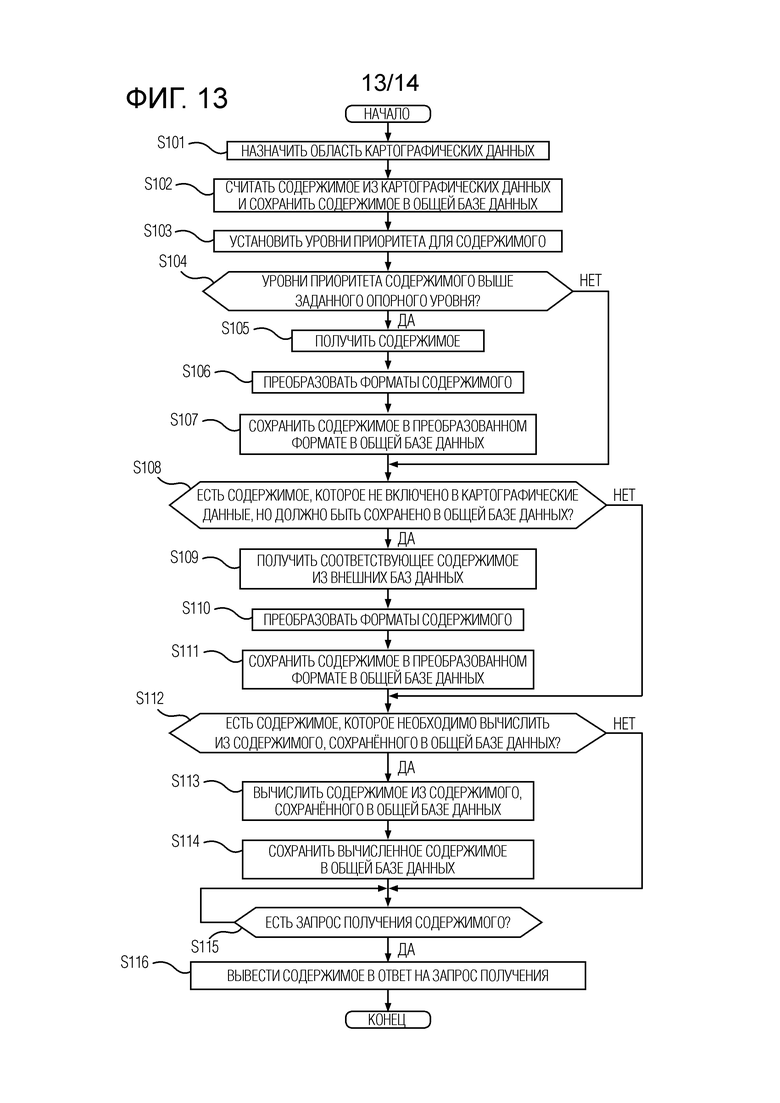
Фиг. 13 является блок–схемой для описания процесса сохранения содержимого картографических данных в общей базе данных.
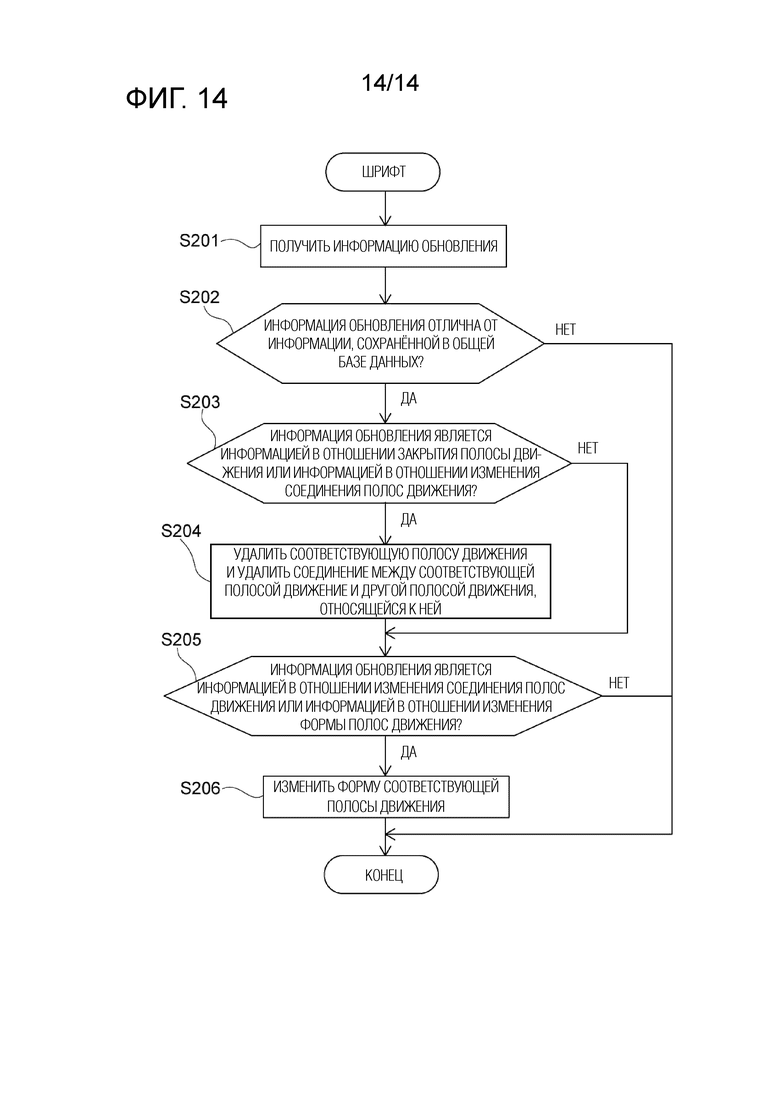
Фиг. 14 является блок–схемой для описания процесса редактирования содержимого картографических данных, сохранённых в общей базе данных.
[Осуществление изобретения]
[0009]
Ниже с обращением к чертежам будут описаны один или более вариантов осуществления настоящего изобретения . На фиг.1 показана блок–схема, иллюстрирующая схему устройства 100 сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения. Устройство 100 сохранения картографических данных, проиллюстрированное на чертеже, функционирует для сохранения содержимого карты с высоким разрешением (карта HD, далее называемая просто «картографическими данными») в общей базе 110 данных. Содержимое карты HD включает в себя по меньшей мере информацию о полосе движения и используется в помощи при вождении или автономном (автоматизированном) управлении (далее называемым «автономным управлением или тому подобным»). Здесь устройство 100 сохранения картографических данных работает для: получения содержимого в различных форматах из множества баз картографических данных A, B, C,…, имеющих разные форматы содержимого, когда транспортное средство выполняет автономное управление или тому подобное (этот режим выполнения будет далее называться «режимом онлайн»); преобразования форматов полученного содержимого в заданный формат, совместимый с программами для автономного управления или тому подобного для транспортного средства; и сохранения содержимого в преобразованном формате в общей базе 110 данных. Кроме того, устройство 100 сохранения картографических данных работает для получения информации обновления картографических данных извне в режиме онлайн и редактирования содержимого, сохранённого в общей базе 110 данных, на основании полученной информации обновления.
[0010]
Устройство 100 сохранения картографических данных включает в себя картографические данные 101, общую базу 110 данных, блок 120 стандартизации базы данных, блок 130 доступа к общей базе данных, блок 140 получения информации обновления и блок 150 редактирования базы данных. Картографические данные 101 являются картографическими данными, которыми обладает рассматриваемое транспортное средство, а формат содержимого картографических данных 101 является форматом, совместимым с программами для автономного управления или тому подобного для рассматриваемого транспортного средства. Картографические данные 101 обновляются через регулярные интервалы (например, каждые шесть месяцев или каждый год), но не редактируются напрямую устройством 100 сохранения картографических данных.
[0011]
Общая база 110 данных хранит содержимое картографических данных 101 и содержимое, полученное из внешних баз картографических данных A, B, C,… . Формат содержимого, полученного из внешних баз картографических данных A, B, C,… и сохраненных в общей базе 110 данных, является таким же, как формат содержимого картографических данных 101. Примеры содержимого, сохранённого в общей базе 110 данных, включают в себя осевую линию полосы движения, линию границы полосы движения, линию остановки, пешеходный переход, дорожный знак, сигнал дорожного движения и окраску дорожного покрытия. Каждому из этих элементов содержимого присваивается идентификатор, указывающий тип содержимого, сущность, представленную содержимым, и индекс, указывающий порядок сохраненного содержимого.
[0012]
Блок 130 доступа к общей базе данных считывает содержимое из картографических данных 101 и сохраняет содержимое в общей базе 110 данных. Кроме того, на основании запроса на получение содержимого картографических данных от системы, которая выполняет функции A, B, C, D, E,… относительно автономного управления или тому подобного, блок 130 доступа к общей базе данных считывает содержимое картографических данных из общей базы 110 данных и выводит содержимое картографических данных в систему, которая выполняет функции A, B, C, D, E,…. Блок 130 доступа к общей базе данных считывает содержимое картографических данных в соответствии с порядком индекса. Примеры информации о содержимом картографических данных, считываемом блоком 130 доступа к общей базе данных, включают в себя индекс, положение (трехмерное абсолютное положение), в котором нанесена линия границы полосы движения, линия остановки или тому подобное, и положение (трёхмерное абсолютное положение), в котором установлен дорожный знак, сигнал дорожного движения или тому подобное.
[0013]
Блок 130 доступа к общей базе данных обозначает область картографических данных, для которой содержимое хранится в общей базе 110 данных, в соответствии с областью движения (текущим положением) рассматриваемого транспортного средства. Фиг. 2 представляет собой схему для описания фрагментов карты. Как показано на рисунке, картографические данные обычно делятся на фрагменты. Каждому фрагменту картографических данных присваивается идентификатор. Блок 130 доступа к общей базе данных указывает идентификатор фрагмента, чтобы тем самым обозначить область картографических данных, для которой содержимое хранится в общей базе 110 данных.
[0014]
Фиг. 3 – схема, иллюстрирующая изгиб дороги. Обращаясь к изгибу дороги, проиллюстрированному на чертеже, будут описаны форматы линий границы полос движения и осевых линий полос движения в картографических данных, которые должны быть сохранены в общей базе 110 данных в одном или более вариантах осуществления настоящего изобретения.
[0015]
На каждой из фиг. 4 и фиг. 5 показана схема, иллюстрирующая пример формата линий границы полосы движения (белые кружки и треугольники на чертеже) и осевых линий полосы движения (ромбовидные фигуры на чертеже) по изгибу дороги. Как показано на фиг. 4, формат для выражения кривых или прямых линий последовательностями дискретных точек может быть проиллюстрирован в качестве формата линий границ полосы движения и осевых линий полосы движения в картографических данных, которые должны храниться в общей базе 110 данных. Посредством выражения линий границ полосы движения и осевых линий полосы движения последовательностями дискретных точек информация о последовательностях точек может быть сохранена в общей базе 110 данных без редактирования. С другой стороны, как показано на фиг. 5, формат для выражения кривых или прямых линий с помощью математических формул также может быть приведен в качестве примера формата линий границ полосы движения и осевых линий полосы движения в картографических данных, которые должны храниться в общей базе 110 данных. Примеры этого формата включают базисные сложнопрофильные кривые (B–Spline) и рациональную совокупность сложнопрофильных кривых (NURBS). Кривая B–Spline представляет собой гладкую кривую, определяемую множеством контрольных точек, а кривая NURBS представляет собой гладкую кривую, определяемую множеством контрольных точек и вектором узлов.
[0016]
Блок 120 стандартизации базы данных включает в себя блок 121A преобразования формата для базы картографических данных A, блок 121B преобразования формата для базы картографических данных B, блок 121C преобразования формата для базы картографических данных C,… и блоки 122A, 122B, 122C,… получения содержимого. Блок 122A получения содержимого получает содержимое из базы картографических данных A и передает содержимое в блок 121A преобразования формата для базы картографических данных A. Блок 122B получения содержимого получает содержимое из базы картографических данных B и передает содержимое в блок 121B преобразования формата для базы картографических данных B. Блок 122C получения содержимого получает содержимое из базы картографических данных C и передает содержимое в блок 121C преобразования формата для базы картографических данных C.
[0017]
Здесь форматы содержимого, включенного в базы картографических данных A, B, C,…, являются отличными друг от друга. С другой стороны, формат содержимого картографических данных обрабатывается системой, которая выполняет функции A, B, C, D, E,… относительно автономного управления или тому подобного для транспортного средства в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой формат, который выражает кривые или прямые линии последовательностями дискретных точек. Следовательно, в устройстве 100 сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения, когда форматы содержимого, полученные из баз картографических данных A, B, C,… блоками 122A, 122B, 122C,… получения содержимого, не являются форматами, которые выражают кривые или прямые линии последовательностями дискретных точек, блок 121A преобразования формата для базы картографических данных A, блок 121B преобразования формата для базы картографических данных B, блок 121C преобразования формата для базы картографических данных C,… преобразуют форматы полученного содержимого с помощью блоков 122A, 122B, 122C,… получения содержимого в формат, который выражает кривые или прямые линии последовательностями дискретных точек. Например, когда каждый из форматов содержимого, полученных из баз картографических данных A, B, C,… блоками 122A, 122B, 122C,… получения содержимого, представляет собой формат кривых B–Spline, кривых NURBS или тому подобное, блок 121A преобразования формата для базы картографических данных A, блок 121B преобразования формата для базы картографических данных B, блок 121C преобразования формата для базы картографических данных C… реконструируют кривые на основании определения кривых B–Spline и т.п. и выполняют выборку реконструированных кривых через равные промежутки времени, таким образом преобразуя формат кривых B–Spline или тому подобное в формат для выражения кривых или прямых линий последовательностями дискретных точек.
[0018]
Блок 121A преобразования формата для базы картографических данных A, блок 121B преобразования формата для базы картографических данных B, блок 121C преобразования формата для базы картографических данных C… сохраняют содержимое, которое было преобразовано в формат для выражения кривых или прямых линий последовательностями дискретных точек, в общей базе 110 данных . Фиг. 6 является схемой, иллюстрирующей линии границы полосы движения как содержимое, который должно храниться в общей базе 110 данных. Как показано на чертеже, блок 121A преобразования формата для базы картографических данных A и другие блоки преобразования формата сохраняют в общей базе 110 данных индексы 0, 1, 2, 3,…, которые указывают порядок сохранения содержимого, трехмерные абсолютные положения (xL0, yL0, zL0), (xL1, yL1, zL1), (xL2, yL2, zL2), (xL3, yL3, zL3),… границы полосы движения с левой стороны и трехмерные абсолютные положения (xR0, yR0, zR0), (xR1, yR1, zR1), (xR2, yR2, zR2), (xR3, yR3, zR3),… границы полосы движения с правой стороны.
[0019]
Блоки 122A, 122B, 122C получения содержимого получают содержимое, которое должно быть сохранено в общей базе 110 данных, но в данный момент не сохранено, из баз картографических данных A, B, C,…. Примеры содержимого, которое должно храниться в общей базе 110 данных, но не хранится в данный момент, включают в себя содержимое, которое требуется от системы, выполняющей функции A, B, C, D, E,… относительно автономного управления или тому подобного и не хранится в общей базе 110 данных. Примеры содержимого, которое требуется от системы, выполняющей функции A, B, C, D, E, ... относительно автономного управления или тому подобного и не сохранено в общей базе 110 данных, включают в себя линии остановки и пешеходные переходы.
[0020]
Фиг.7 является схемой, иллюстрирующей линии остановки в качестве содержимого, полученного из баз картографических данных A, B, C,…. Как показано на чертеже, блоки 122A, 122B, 122C,… получения содержимого получают индексы 0, 1, 2, 3, ..., которые указывают порядок сохранения содержимого, трехмерные абсолютные положения (x01, y01, z01), (x11, y11, z11), (x21, y21, z21), (x31, y31, z31), ... одних конечных точек линий остановки и трехмерные абсолютные положения (x02, y02, z02), (x12, y12, z12), (x22, y22, z22), (x32, y32, z32),… других конечных точек линий остановки из баз картографических данных A, B, C,…. В устройстве 100 сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения формат, представленный множеством точек абсолютных координат, такой как формат линий остановки, обрабатывается как общий формат для формата, представленного последовательностями точек. То есть когда блоками 122A, 122B, 122C,… получения содержимого получено содержимое в формате, представленном множеством точек абсолютных координат, полученное содержимое сохраняется в общей базе 110 данных без преобразования формата блоком 121A преобразования формата для базы картографических данных A, блоком 121B преобразования формата для базы картографических данных B, блоком 121C преобразования формата для базы картографических данных C….
[0021]
Здесь, при выполнении функций A, B, C, D, E,… относительно автономного управления или тому подобного, существуют высокие и низкие уровни для достижения функций, и в зависимости от уровня, тип необходимого содержимого картографических данных и количество элементов содержимого картографических данных являются различными. Например, для достижения функции удержания полосы на скоростной автомагистрали в качестве содержания картографических данных требуются линии границы полос движения и осевые линии полос движения. В качестве дополнения или альтернативы, для достижения функции автономного управления на дороге общего пользования в качестве содержания картографических данных в дополнение к границам полос движения и осевым линиям полос движения необходимы линии остановки, пешеходные переходы, дорожные знаки и т.д. Соответственно, каждый из блока 121A преобразования формата для базы картографических данных A, блока 121B преобразования формата для базы картографических данных B, блока 121C преобразования формата для базы картографических данных C... имеет функцию назначения уровня приоритета и устанавливает уровень приоритета для содержимого, которое необходимо получить, в соответствии с уровнем для достижения соответствующей функции A, B, C, D, E,…. Блоки 122A, 122B, 122C,… получения содержимого получают содержимое из баз картографических данных A, B, C,… в соответствии с установленными уровнями приоритета.
[0022]
Блок 130 доступа к общей базе данных считывает содержимое картографических данных из общей базы 110 данных на основании запроса на получение содержимого картографических данных из системы, которая выполняет функции A, B, C, D, E,… относительно автономного управления или тому подобного для транспортного средства, и выводит содержимое картографических данных в функции A, B, C, D, E,…. Блок 130 доступа к общей базе данных считывает содержимое в соответствии с порядком индекса. Примеры информации о содержимом, считываемом блоком 130 доступа к общей базе данных, включают в себя индекс, положение (широту/долготу), в котором проведена граница полосы движения, линия остановки или тому подобное, и положение (широта/долгота), в котором установлен дорожный знак, дорожный сигнал или тому подобное.
[0023]
Здесь, когда содержимое картографических данных, запрошенное системой, которая выполняет функции A, B, C, D, E,… относительно автономного управления и тому подобного, сохранено в общей базе 110 данных, блок 130 доступа к общей базе данных считывает запрошенное содержимое из общей базы 110 данных и выводит запрошенное содержимое в систему, которая выполняет функции A, B, C, D, E,… относительно автономного управления или тому подобного. С другой стороны, когда содержимое картографических данных, запрошенное системой, которая выполняет функции A, B, C, D, E,… относительно автономного управления и тому подобного, не сохраняется в общей базе 110 данных, блоки 122A, 122B, 122C,… получения содержимого получают запрашиваемое содержимое из баз картографических данных A, B, C,…. Например, когда информация о линиях остановки запрашивается из системы, которая выполняет функции A, B, C, D, E,… относительно автономного управления или тому подобного, и информация о линиях остановки не сохраняется в общей базе 110 данных, но хранится в любой из баз картографических данных A, B, C,…, любой из блоков 122A, 122B, 122C,… получения содержимого получает информацию о линиях остановки из соответствующей базы картографических данных A, B, C,….
[0024]
Когда содержимое картографических данных, запрошенное системой, которая выполняет функции A, B, C, D, E,… относительно автономного управления и тому подобного, не сохранено в общей базе 110 данных, блок 130 доступа к общей базе данных может вычислить запрошенное содержимое на основании содержимого, сохранённого в общей базе 110 данных. Например, информация о расстоянии, оставшемся до достижения рассматриваемым транспортным средством линии остановки, является полезной информацией, когда рассматриваемое транспортное средство движется вблизи перекрестка дороги общего пользования, но такая информация не сохраняется в общей базе 110 данных. Таким образом, блок 130 доступа к общей базе данных вычисляет расстояние, оставшееся до достижения рассматриваемым транспортным средством линии остановки, например, используя информацию об осевой линии полосы движения и информацию о линии остановки, которые получены из баз картографических данных A, B, C,…. Затем блок 130 доступа к общей базе данных сохраняет информацию о вычисленном расстоянии, оставшемся до достижения рассматриваемым транспортным средством линии остановки, в общей базе 110 данных.
[0025]
Фиг. 8 является схемой для описания информации о расстоянии, оставшемся до достижения рассматриваемым транспортным средством линии остановки, причём упомянутое оставшееся расстояние должно быть сохранено в общей базе 110 данных. Как показано на чертеже, блок 130 доступа к общей базе данных сохраняет в общей базе 110 данных индексы, которые указывают порядок сохранения информации, идентификаторы осевых линий полос движения, идентификаторы линий остановки, которые пересекаются с осевыми линиями полос движения, которым присвоены их идентификаторы, и абсолютные координаты точек пересечения между осевыми линиями полос движения и линиями остановки.
[0026]
Примеры содержимого, выводимого из блока 130 доступа к общей базе данных в систему, которая выполняет функции A, B, C, D, E,… относительно автономного управления или тому подобного, включают в себя функцию осевой линии полосы движения с аргументом, являющимся идентификатором, назначенным осевой линии полосы движения, функцию осевой линии полосы движения с аргументом, являющимся положением рассматриваемого транспортного средства, и функцию оставшегося расстояния от рассматриваемого транспортного средства до линии остановки с аргументом, являющимся положением рассматриваемого транспортного средства. Примеры функции осевой линии полосы движения с аргументом, являющимся идентификатором, назначенным осевой линии полосы движения, и функции осевой линии полосы движения с аргументом, являющимся положением рассматриваемого транспортного средства, включают в себя координаты последовательности точек осевой линии полосы движения и информацию об атрибуте полосы движения (таком как ограничение скорости, кривизна или градиент). Примеры функции оставшегося расстояния от рассматриваемого транспортного средства до линии остановки с аргументом, являющимся положением рассматриваемого транспортного средства, включают в себя расстояние до линии остановки, которая первой встретится рассматриваемому транспортному средству при продолжении движения в текущей полосе движения.
[0027]
Блок 140 получения информации обновления, показанный на фиг. 1, принимает информацию обновления от внешнего устройства рассматриваемого транспортного средства через бортовой терминал связи, используя беспроводную связь, такую как линия связи стандарта Долгосрочного развития (LTE), линия связи 4G или линия связи 5G. Примеры информации обновления включают в себя информацию, передаваемую с сервера, принадлежащего производителю автомобилей, другой коммерческой компании, или тому подобное, и информацию, полученную с сервера, который обеспечивает информацию о дорожном движении. Примеры информации обновления, передаваемой с сервера, принадлежащего производителю автомобилей или тому подобному, включают в себя информацию о разности между картографическими данными нового поколения и картографическими данными старого поколения. С другой стороны, примеры информации, обеспечиваемой сервером, который обеспечивает информацию о дорожном движении, включают в себя информацию о закрытии полосы движения, информацию об изменении соединения полосы движения и информацию об изменении формы полосы движения. Закрытие полосы движения, изменение соединения полосы движения, изменение формы полосы движения и т.п. представлены информацией, формируемой на сервере, который обеспечивает информацию о дорожном движении на основании информации о дорожном строительстве, информации о дорожно–транспортных происшествиях, информации о новых дорогах и т.п.
[0028]
Блок 150 редактирования базы данных редактирует содержимое, сохраненное в общей базе 110 данных, в соответствии с информацией обновления, полученной блоком 140 получения информации обновления. Например, когда информация обновления, полученная блоком 140 получения информации обновления, включает в себя информацию о закрытии полосы и/или информацию, касающуюся изменения соединения полосы, блок 150 редактирования базы данных удаляет соответствующую полосу или полосы движения, сохранённые в общей базе 110 данных, и/или удаляет соединение между соответствующей полосой движения или полосами движения и соответствующей полосой движения или полосами движения, расположенными впереди.
[0029]
Каждая из фиг. 9 и фиг. 10 представляет собой схему, иллюстрирующую пример редактирования полос движения, сохраненных в общей базе 110 данных, когда информация обновления, полученная блоком 140 получения информации обновления, включает в себя информацию о закрытии полосы движения. Как показано на фиг. 9, когда полоса движения, расположенная перед перекрестком, закрыта, закрытая полоса движения, расположенная перед перекрестком и сохраненная в общей базе 110 данных, удаляется. С другой стороны, как показано на фиг. 10, когда полоса движения непосредственно после того, как рассматриваемое транспортное средство проезжает перекресток, закрыта и рассматриваемое транспортное средство движется перед перекрестком, закрытая полоса движения непосредственно после того, как рассматриваемое транспортное средство проезжает перекресток, удаляется, и соединение между закрытой полосой движения и полоса движения перед пересечением удаляется. Это может исключить риск того, что рассматриваемое транспортное средство попадёт в закрытую полосу движения после проезда перекрестка.
[0030]
Здесь, если полоса движения закрыта, необходимо предотвратить попадание транспортного средства в закрытую полосу движения, поэтому необходимо удалить закрытую полосу движения и/или удалить соединение между закрытой полосой движения и соответствующей полосой движения, расположенной впереди, но нет необходимости изменять форму полосы движения. Следовательно, в одном или более вариантах осуществления настоящего изобретения с точки зрения предотвращения увеличения объема обработки, связанного с редактированием содержимого, а также снижения потребления ресурсов, когда полоса движения закрыта, блок 150 редактирования базы данных удаляет закрытую полосу движения и/или удаляет соединение между закрытой полосой движения и соответствующей полосой движения, расположенной впереди, но не изменяет форму полосы движения.
[0031]
На фиг.11 показана схема, иллюстрирующая пример редактирования полос движения, сохранённых в общей базе 110 данных, когда информация обновления, полученная блоком 140 получения информации обновления, является информацией, в которой направление движения в центральной полосе движения изменяется на противоположное в зависимости от временного интервала. Как показано на чертеже, когда направление движения в центральной полосе движения изменяется на противоположное от утреннего временного интервала к ранневечернему временному интервалу (направление движения в дневном временном интервале является таким же, как и в утреннем временном интервале или в ранневечернем временном интервале), например, центральная полоса движения удаляется, и соединение между центральной полосой движения и другой полосой движения, относящейся к центральной полосе движения, удаляется на определенный период до и после того времени, когда изменяется направление движения в центральной полосе движения. Это может исключить риск того, что рассматриваемое транспортное средство въедет в центральную полосу движения в направлении, противоположном направлению движения в центральной полосе движения, до и после изменения направления движения.
[0032]
Блок 150 редактирования базы данных имеет функцию редактирования базы данных для редактирования содержимого, сохраненного в общей базе 110 данных, в соответствии с информацией обновления, полученной блоком 140 получения информации обновления. Примеры функции редактирования базы данных включают в себя функцию редактирования информации о соединении полос движения. Функция редактирования информации о соединении полос движения является функцией удаления соответствующей полосы или полос движения, сохраненных в общей базе 110 данных, и/или удаления соединения между соответствующей полосой или полосами движения и соответствующей полосой движения или полосами движения, расположенными впереди, когда информация обновления, полученная блоком 140 получения информации обновления, включает в себя информацию о закрытии полосы движения и/или информацию, относящуюся к изменению соединения полос движения.
[0033]
Примеры функции редактирования базы данных блоком 150 редактирования базы данных дополнительно включают в себя функцию редактирования формы полосы движения. Функция редактирования формы полосы движения является функцией изменения формы соответствующей полосы движения, сохраненной в общей базе 110 данных, когда информация обновления, полученная блоком 140 получения информации обновления, включает в себя информацию, относящуюся к изменению формы полосы движения. В одном или более вариантах осуществления настоящего изобретения, когда информация обновления, полученная блоком 140 получения информации обновления, включает в себя информацию, относящуюся к изменению формы полосы движения, блок 150 редактирования базы данных изменяет форму соответствующей полосы движения на основании формы полосы движения и формы полос движения, соединяющихся с полосой движения впереди и/или сзади.
[0034]
На фиг.12 показана схема, иллюстрирующая пример редактирования полос движения, сохраненных в общей базе 110 данных, когда информация обновления, полученная блоком 140 получения информации обновления, включает в себя изменение формы полосы движения. Как показано на чертеже, когда полоса движения, расположенная перед пересечением, не полностью закрыта, а часть полосы движения, расположенная до пересечения, является непроходимой, блок 150 редактирования базы данных изменяет форму полосы движения, сохраненную в общей базе 110 данных, на основании полосы движения сразу после проезда перекрестка. Например, когда такое непроходимое положение имеется на полосе движения с правой стороны перед перекрестком, а транспортное средство должно повернуть направо на перекрестке, форма полосы движения изменяется на такую форму, чтобы транспортное средство сменило полосу движения на соседнюю полосу движения перед непроходимым положением и вернулось на исходную полосу движения сразу после прохождения непроходимого положения.
[0035]
Здесь, когда информация обновления, полученная блоком 140 получения информации обновления, не включает в себя собственно форму полосы движения, информация полосы движения может быть сформирована на основании информации о траектории движения транспортного средства в фрагменте, который установлен на основании области движения рассматриваемого транспортного средства. Например, линии границы полосы движения могут быть сформированы на основании ширины полосы движения на основании атрибута дороги, включенного в картографические данные, и информации о траектории движения транспортного средства.
[0036]
Фиг. 13 является блок–схемой для описания процесса сохранения содержимого картографических данных в общей базе 110 данных. Как проиллюстрировано на блок–схеме, сначала на этапе S101 блок 130 доступа к общей базе данных обозначает область картографических данных, для которой содержимое сохранено в общей базе 110 данных, в соответствии с областью движения рассматриваемого транспортного средства. Затем на этапе S102 блок 130 доступа к общей базе данных считывает содержимое области, обозначенной на этапе S101, из картографических данных 101, и сохраняет содержимое в общей базе 110 данных.
[0037]
Затем, на этапе S103, блок 121A преобразования формата для базы картографических данных A, блок 121B преобразования формата для базы картографических данных B, блок 121C преобразования формата для базы картографических данных C… устанавливает уровни приоритета содержимого, которое должно быть получено в соответствии с упомянутыми уровнями для достижения функций A, B, C, D, E,… в отношении автономного управления или тому подобного. Затем на этапе S104 блоки 122A, 122B, 122C,… получения содержимого определяют, являются ли уровни приоритета содержимого, которые могут быть получены из баз картографических данных A, B, C,…, более высокими, чем заданный опорный уровень. За положительным определением на этапе S104 следует этап S105, тогда как за отрицательным определением на этапе S104 следует этап S108.
[0038]
На этапе S105 блоки 122A, 122B, 122C,… получения содержимого получают содержимое с уровнями приоритета, превышающими заданный опорный уровень, из баз картографических данных A, B, C,…. Затем, на этапе S106, блок 121A преобразования формата для базы картографических данных A, блок 121B преобразования формата для базы картографических данных B, блок 121C преобразования формата для базы картографических данных C… преобразует форматы содержимого, полученного из базы картографических данных A, B, C,… блоками 122A, 122B, 122C,… получения содержимого в формат, совместимый с системой, которая выполняет функции A, B, C, D, E,… в отношении автономного управления или тому подобного. Затем на этапе S107 блок 121A преобразования формата для базы картографических данных A, блок 121B преобразования формата для базы картографических данных B, блок 121C преобразования формата для базы картографических данных C… сохраняет содержимое в преобразованном формате в общей базе 110 данных.
[0039]
Затем, на этапе S108, блоки 122A, 122B, 122C,… получения содержимого определяют, существует ли содержимое, которое не включено в картографические данные 101, но должно быть сохранено в общей базе 110 данных. За положительным определением на этапе S108 следует этап S109, в то время как за отрицательным определением на этапе S108 следует этап S112. На этапе S109 блоки 122A, 122B, 122C,… получения содержимого получают содержимое, которое не включено в картографические данные 101, но должно храниться в общей базе 110 данных, из баз картографических данных A, B, C,…. Затем на этапе S110 блок 121A преобразования формата для базы картографических данных A, блок 121B преобразования формата для базы картографических данных B, блок 121C преобразования формата для базы картографических данных C… преобразует форматы содержимого, полученного из базы картографических данных A, B, C,… блоками 122A, 122B, 122C,… получения содержимого в формат, совместимый с системой, которая выполняет функции A, B, C, D, E,… в отношении автономного управления или тому подобного. Затем на этапе S111 блок 121A преобразования формата для базы картографических данных A, блок 121B преобразования формата для базы картографических данных B, блок 121C преобразования формата для базы картографических данных C… сохраняет содержимое в преобразованном формате в общей базе 110 данных.
[0040]
На этапе S112 блоки 122A, 122B, 122C получения содержимого определяют, существует ли содержимое, которое должно быть вычислено, на основании содержимого, сохраненного в общей базе 110 данных. За положительным определением на этапе S112 следует этап S113, тогда как за отрицательным определением на этапе S112 следует этап S115.
[0041]
На этапе S113 блоки 122A, 122B, 122C,… получения содержимого вычисляют содержимое, который не хранится в общей базе 110 данных, на основании содержимого, сохранённого в общей базе 110 данных. Затем, на этапе S114, блок 121A преобразования формата для базы картографических данных A, блок 121B преобразования формата для базы картографических данных B, блок 121C преобразования формата для базы картографических данных C… сохраняют вычисленное содержимое в общей базе 110 данных.
[0042]
Затем, на этапе S115, блок 130 доступа к общей базе данных определяет, имеется ли запрос на получение содержимого от системы, которая выполняет функции A, B, C, D, E, ... в отношении автономного управления или тому подобного. За положительным определением на этапе S115 следует этап S116. На этапе S116 блок 130 доступа к общей базе данных считывает запрошенное содержимое из общей базы 110 данных и выводит содержимое в систему, которая выполняет функции A, B, C, D, E, .... Таким образом завершается процесс сохранения содержимого картографических данных в общей базе 110 данных.
[0043]
Фиг. 14 – это блок–схема для описания процесса редактирования содержимого картографических данных, сохранённых в общей базе 110 данных. Как проиллюстрировано на блок–схеме, блок 140 получения информации обновления принимает информацию обновления извне рассматриваемого транспортного средства во время онлайн–режима (этап S201). Затем блок 150 редактирования базы данных определяет, отличается ли информация обновления, полученная блоком 140 получения информации обновления, от информации, сохраненной в общей базе 110 данных (этап S202). За положительным определением на этапе S202 следует этап S203, тогда как за отрицательным определением на этапе S202 следует завершение процесса.
[0044]
На этапе S203 блок 150 редактирования базы данных определяет, является ли информация обновления, полученная блоком 140 получения информации обновления, информацией о закрытии полосы движения или информацией об изменении соединения полосы движения. За положительным определением на этапе S203 следует этап S204, тогда как за отрицательным определением на этапе S203 следует этап S205. На этапе S204 блок 150 редактирования базы данных удаляет соответствующую полосу движения, сохраненную в общей базе 110 данных, и изменяет соединение между соответствующей полосой движения и другой полосой движения, относящейся к соответствующей полосе движения.
[0045]
Затем, на этапе S205, блок 150 редактирования базы данных определяет, является ли информация обновления, полученная блоком 140 получения информации обновления, информацией об изменении соединения полосы движения или информацией об изменении формы полосы движения. За положительным определением на этапе S205 следует этап S206, тогда как за отрицательным определением на этапе S205 следует завершение процесса.
[0046]
На этапе S206 блок 150 редактирования базы данных изменяет форму соответствующей полосы движения, сохраненной в общей базе 110 данных. Таким образом завершается процесс редактирования содержимого картографических данных, сохранённых в общей базе 110 данных.
[0047]
Как описано выше, в способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения форматы полученного содержимого картографических данных преобразуются в заданный формат, который может использоваться в рассматриваемом транспортном средстве, причём содержимое картографических данных, преобразованное в заданный формат сохраняется в общей базе 110 данных, получают информацию обновления, относящуюся к содержимому картографических данных, сохраненному в общей базе 110 данных, и содержимое картографических данных в упомянутом заданном формате, сохраненное в общей базе 110 данных, редактируют на основании полученной информации обновления. Благодаря этой операции, какими бы ни были форматы содержимого картографических данных, полученного из внешних баз картографических данных A, B, C,…, содержимое картографических данных можно использовать для редактирования содержимого картографических данных, используемого в рассматриваемом транспортном средстве.
[0048]
В одном или более вариантах осуществления настоящего изобретения для каждого элемента содержимого картографических данных устанавливается один тип упомянутого заданного формата. Например, как описано выше, форматы линий границ полос движения и осевых линий полос движения объединены в формат, в котором линии границы полос движения и осевые линии полос движения выражены последовательностями точек (см. Фиг. 4). Согласно вышеупомянутому признаку, для каждого элемента содержимого устанавливается один тип заданного формата таким образом, чтобы быть совместимым с программами системы, которая выполняет функции A, B, C,… в отношении автономного управления или тому подобного на стороне транспортного средства, и таким образом полученное содержимое картографических данных может использоваться для работы системы без изменения программ системы.
[0049]
Здесь содержимое в форматах, в которых линии выражены последовательностями точек, может иметь большую емкость данных по сравнению с форматом, в котором линии выражены математическими формулами, такими как кривые B-Spline (см. Фиг.5). Следовательно, в одном или более вариантах осуществления настоящего изобретения упомянутый один тип заданного формата, установленный для каждого элемента содержимого картографических данных, выполнен в формате, в котором линии выражены последовательностями точек, а емкость данных, которые должны быть сохранены в общей базе 110 данных при этом снижается.
[0050]
В способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения уровень приоритета назначается содержимому картографических данных в соответствии с частотой использования в соответствующем транспортном средстве, при этом предпочтение отдаётся получению содержимого картографических данных с более высоким уровнем приоритета, и полученное содержимое картографических данных преобразуется в заданный формат и сохраняется в базе данных. Таким образом, содержимое, подвергнутое процессу преобразования формата и процессу сохранения в общей базе 110 данных, ограничено содержимым, которое имеет высокую степень необходимости, таким как линии границы полос движения и соединения полос движения. Это может предотвратить нехватку необходимого содержимого в системе, которая выполняет функции A, B, C, ... в отношении автономного управления или тому подобного на стороне транспортного средства. Кроме того, в процессе преобразования формата для контента и процессе сохранения в общей базе 110 данных может быть уменьшен объем обработки, а также может быть снижено использование памяти в общей базе 110 данных.
[0051]
В способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения содержимое картографических данных, которое не включено в картографические данные, которыми обладает рассматриваемое транспортное средство, получают из баз картографических данных A, B, C,…, форматы полученного содержимого картографических данных преобразуют в вышеупомянутый заданный формат, и содержимое картографических данных в преобразованном формате сохраняют в общей базе 110 данных (см. фиг. 8). Посредством этой операции, даже когда необходимое содержимое увеличивается в системе, которая выполняет функции A, B, C, ... в отношении автономного управления или тому подобного на стороне транспортного средства, может быть предотвращена нехватка увеличенного содержимого.
[0052]
В способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения содержимое, которое не включено в картографические данные 101, которыми обладает рассматриваемое транспортное средство, формируется на основании содержимого картографических данных, сохранённого в общей базе 110 данных, и сформированное содержимое картографических данных сохраняется в общей базе 110 данных (см. фиг. 8). Благодаря этой операции, даже когда необходимое содержимое увеличивается в системе, которая выполняет функции A, B, C, ... в отношении автономного управления или тому подобного на стороне транспортного средства, может быть предотвращена нехватка увеличенного содержимого. Кроме того, благодаря сохранению сформированного содержимого в общей базе 110 данных нет необходимости формировать содержимое каждый раз, когда содержимое запрашивается системой, которая выполняет функции A, B, C, ... в отношении автономного управления или тому подобного на стороне транспортного средства, и может быть снижен объем обработки в процессе формирования содержимого.
[0053]
В способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения содержание картографических данных получают в соответствии с информацией о текущем положении рассматриваемого транспортного средства (см. Фиг. 2). Благодаря этой операции содержимое картографических данных может быть преобразовано в формат в соответствии с текущим положением рассматриваемого транспортного средства и может храниться в общей базе 110 данных, а система, выполняющая функции A, B, C, ... в отношении автономного управления или тому подобного на стороне транспортного средства может использовать содержимое картографических данных в соответствии с текущим положением рассматриваемого транспортного средства.
[0054]
В способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения, когда получают информацию о закрытии полосы движения или информацию о соединении полосы движения в качестве информации обновления, информацию в отношении соединения полосы движения, сохранённую в общей базе 110 данных, редактируют (см. Фиг. 10). Благодаря этой операции, когда система, выполняя функцию автономного управления рассматриваемым транспортным средством, использует содержимое картографических данных, сохранённое в общей базе 110 данных, может быть предотвращён въезд рассматриваемого транспортного средства на закрытую полосу движения. Здесь, когда полоса движения закрыта, необходимо удалить закрытую полосу движения и/или удалить соединение между закрытой полосой движения и соответствующей полосой движения, расположенной впереди, но изменять форму полосы движения не нужно. Таким образом, в одном или более вариантах осуществления настоящего изобретения когда полоса движения закрыта, удаляется только закрытая полоса движения и соединение между закрытой полосой движения и другой полосой движения, относящейся к закрытой полосе движения, без изменения формы полосы движения. Это может исключить увеличение объема обработки, связанного с редактированием содержимого, а также снизить использование ресурсов.
[0055]
В способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами выполнения настоящего изобретения, когда информация о закрытии полосы движения сразу за перекрёстком получена во время движения рассматриваемого транспортного средства перед перекрёстком в качестве информации обновления, сохранённой в общей базе 110 данных, полосу движения, расположенную перед перекрестком и соединённую с закрытой полосой движения, и соединение между полосой движения, расположенной перед перекрестком и другой полосой движения, связанной с упомянутой полосой движения, удаляют (см. Фиг. 10). Благодаря этой операции, когда система, которая выполняет функцию автономного управления рассматриваемым транспортным средством, использует содержимое картографических данных, сохранённое в общей базе 110 данных, может быть предотвращён въезд рассматриваемого транспортного средства в закрытую полосу движения после проезда перекрёстка.
[0056]
В способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами выполнения настоящего изобретения, при изменении направления движения в полосе движения, полоса движения и соединение между полосой движения и другой полосой движения, относящейся к упомянутой полосе движения, удаляются на заданное время (см. Фиг. 11). Благодаря этой операции, когда система, которая выполняет функцию автономного управления рассматриваемым транспортным средством, использует содержимое картографических данных, сохранённое в общей базе 110 данных , может быть предотвращён въезд рассматриваемого транспортного средства на полосу движения в направлении движения, противоположном направлению движения в полосе движения, которое было изменено.
[0057]
В способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами выполнения настоящего изобретения, когда информация о соединении полосы движения или информация об изменении формы полосы движения получается в качестве информации обновления, информация о форме полосы движения, сохранённая в общей базе 110 данных, редактируется (см. Фиг. 12). Например, если на полосе движения с правой стороны перед перекрестком имеется непроходимое положение и транспортное средство должно повернуть направо на перекрестке, форма полосы движения изменяется на форму таким образом, чтобы транспортное средство сменило полосу движения на соседнюю полосу движения перед непроходимым положением и вернулось в исходную полосу движения сразу после прохождения непроходимого положения. Посредством этой операции, когда система, которая выполняет функцию автономного управления рассматриваемым транспортным средством, использует содержимое картографических данных, сохранённое в общей базе 110 данных, даже если в направлении движения имеется непроходимое положение, рассматриваемым транспортным средством можно управлять таким образом, чтобы оно двигалось в желаемом направлении, при этом избегая непроходимого положения.
[0058]
В способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения информация, относящаяся к форме полосы движения, формируется на основании информации о траектории движения рассматриваемого транспортного средства, и информация, относящаяся к форме полосы движения, сохраненная в общей базе 110 данных, редактируется на основании сформированной информации, относящейся к форме полосы движения. Посредством этой операции, даже когда информация о линиях границы полос движения не может быть получена из баз картографических данных A, B, C, ..., информация в отношении формы полосы движения, сохраненная в общей базе 110 данных, может быть отредактирована.
[0059]
В способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения линия границы полосы движения в качестве формы полосы движения формируется на основании информации о траектории движения рассматриваемого транспортного средства и ширины полосы движения в качестве информации об атрибутах дороги, и информация относительно линии границы полосы движения, сохранённая в общей базе 110 данных, редактируется на основании сформированной линии границы полосы движения. Посредством этой операции, даже когда информация о линиях границы полос движения не может быть получена из баз картографических данных A, B, C, ..., информация в отношении линий границы полос движения, сохраненная в общей базе 110 данных, может быть отредактирована.
[0060]
В способе и устройстве сохранения картографических данных в соответствии с одним или более вариантами осуществления настоящего изобретения форма соответствующей полосы движения, сохранённая в общей базе 110 данных, изменяется на основании формы полосы движения, расположенной перед и/или позади соответствующей полосы движения (см. фиг. 12). Посредством этой операции, когда форма полосы движения, сохраненная в общей базе 110 данных, изменяется, форма полосы движения может быть изменена на гладкую форму полосы движения.
[0061]
Варианты осуществления, описанные выше, описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеприведённых вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, находящиеся в рамках технического объема настоящего изобретения. Например, когда имеется два или более типов форматов содержимого, совместимых с системой, которая выполняет функции A, B, C,… в отношении автономного управления или тому подобного для рассматриваемого транспортного средства, может не быть необходимым преобразование форматов полученного содержимого в один тип формата, и они могут быть изменены на формат, выбранный из двух или более типов форматов, или изменены надлежащим образом.
[Описание ссылочных позиций]
[0062]
100 Устройство сохранения картографических данных
110 Общая база данных
120 Блок стандартизации баз данных
130 Блок доступа к общей базе данных
140 Блок получения информации обновления
150 Блок редактирования базы данных
Настоящее изобретение относится к способу сохранения картографических данных и устройству сохранения картографических данных. Представлен способ сохранения картографических данных для получения содержимого картографических данных, используемого в рассматриваемом транспортном средстве, и сохранения содержимого картографических данных в общей базе (110) данных с использованием контроллера. Этот способ включает этапы, на которых назначают уровень приоритета содержимому картографических данных, получают в качестве содержимого картографических данных с более высоким уровнем приоритета по меньшей мере одно из линии границы полосы движения и соединения полос движения. Затем преобразуют формат полученного содержимого картографических данных, включающего в себя линию границы полосы движения и соединение полос движения, в заданный формат, который может использоваться в рассматриваемом транспортном средстве, после сохраняют содержимое картографических данных, преобразованных в заданный формат, в базе данных, получают информацию обновления в отношении содержимого картографических данных, сохранённого в базе данных, и редактируют содержимое картографических данных в заданном формате, сохранённое в базе данных, на основании полученной информации обновления. Технический результат – обеспечение возможности редактирования содержимого картографических данных в рассматриваемом транспортном средстве на основании полученного содержимого картографических данных в формате, отличном от того, который используется в рассматриваемом транспортном средстве. 2 н. и 15 з.п. ф-лы, 14 ил.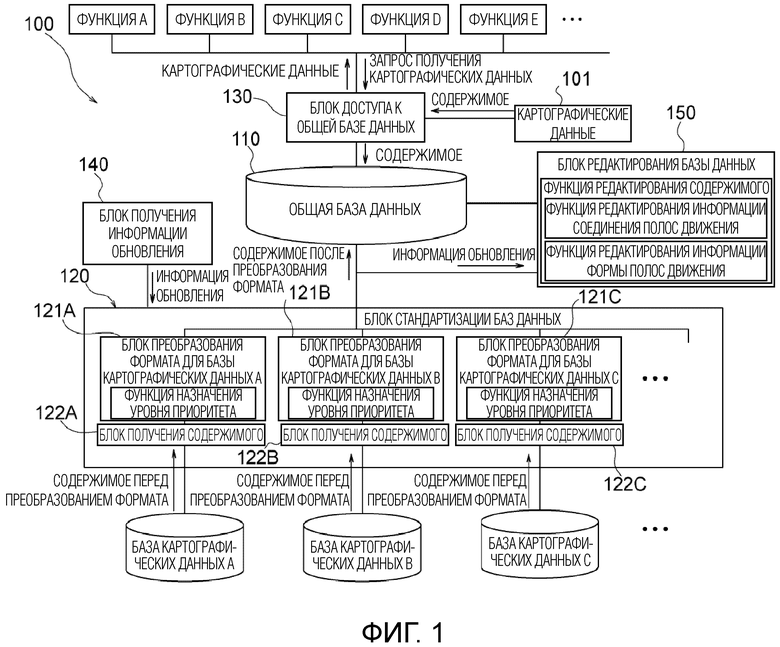
1. Способ сохранения картографических данных для получения содержимого картографических данных, используемого в рассматриваемом транспортном средстве, и сохранения содержимого картографических данных в базе данных с использованием контроллера, содержащий этапы, на которых:
назначают уровень приоритета содержимому картографических данных;
получают в качестве содержимого картографических данных с более высоким уровнем приоритета по меньшей мере одно из линии границы полосы движения и соединения полос движения;
преобразуют формат полученного содержимого картографических данных, включающего в себя линию границы полосы движения и соединение полос движения, в заданный формат, который может использоваться в рассматриваемом транспортном средстве;
сохраняют содержимое картографических данных, преобразованных в заданный формат, в базе данных;
получают информацию обновления в отношении содержимого картографических данных, сохранённого в базе данных; и
редактируют содержимое картографических данных в заданном формате, сохранённое в базе данных, на основании полученной информации обновления.
2. Способ сохранения картографических данных по п.1, в котором один тип заданного формата устанавливается для каждого элемента содержимого картографических данных.
3. Способ сохранения картографических данных по п.2, в котором заданный формат представляет собой формат, в котором линия выражается последовательностью точек.
4. Способ сохранения картографических данных по любому из пп.1–3, содержащий этапы, на которых:
назначают уровень приоритета содержимому картографических данных в соответствии с частотой использования содержимого картографических данных в рассматриваемом транспортном средстве; и
получают содержимое картографических данных с предпочтением более высокого уровня приоритета, преобразуют содержимое картографических данных в заданный формат и сохраняют содержимое картографических данных в базе данных.
5. Способ сохранения картографических данных по п.4, содержащий этапы, на которых:
устанавливают уровень приоритета линии границы полосы движения и соединения полосы движения в качестве содержимого картографических данных на уровень, который позволяет получать содержимое картографических данных, преобразовывать его в заданный формат и сохранять его в базе данных.
6. Способ сохранения картографических данных по любому из пп.1–3, содержащий этапы, на которых:
получают содержимое, которое не включено в картографические данные, которыми обладает рассматриваемое транспортное средство;
преобразуют формат полученного содержимого картографических данных в заданный формат; и
сохраняют картографические данные, преобразованные в заданный формат, в базе данных.
7. Способ сохранения картографических данных по любому из пп.1–3, содержащий этапы, на которых:
формируют содержимое, которое не включено в картографические данные, которыми обладает рассматриваемое транспортное средство, на основании содержимого картографических данных, сохранённого в базе данных; и
сохраняют сформированные картографические данные в базе данных.
8. Способ сохранения картографических данных по любому из пп.1–3, содержащий этап, на котором
получают содержимое картографических данных в соответствии с текущей информацией о положении транспортного средства.
9. Способ сохранения картографических данных по любому из пп.1–3, содержащий этап, на котором
при получении информации в отношении закрытия полосы движения или информации в отношении соединения полосы движения в качестве информации обновления редактируют информацию в отношении соединения полосы движения, сохраненную в базе данных.
10. Способ сохранения картографических данных по любому из пп.1–3, содержащий этап, на котором
при получении информации в отношении закрытия полосы движения в качестве информации обновления удаляют закрытую полосу движения и соединение между закрытой полосой движения и другой полосой движения, относящейся к закрытой полосе движения, причём закрытая полоса движения и соединение сохранены в базе данных.
11. Способ сохранения картографических данных по любому из пп.1–3, содержащий этап, на котором
при получении информации в отношении закрытия полосы движения непосредственно после перекрестка при движении рассматриваемого транспортного средства перед перекрестком удаляют полосу, расположенную перед перекрестком и соединенную с закрытой полосой движения, и соединение между полосой, расположенной перед перекрестком, и другой полосой движения, относящейся к упомянутой полосе, причём упомянутая полоса и соединение сохранены в базе данных в качестве информации обновления.
12. Способ сохранения картографических данных по любому из пп.1–3, содержащий этап, на котором,
когда направление движения в полосе движения изменяется, удаляют полосу движения и соединение между полосой движения и другой полосой движения, относящейся к упомянутой полосе движения, в течение заданного времени.
13. Способ сохранения картографических данных по любому из пп.1–3, содержащий этап, на котором
при получении информации в отношении соединения полосы движения или информации в отношении изменения формы полосы движения в качестве информации обновления редактируют информацию, относящуюся к форме полосы движения, сохраненную в базе данных.
14. Способ сохранения картографических данных по любому из пп.1–3, содержащий этапы, на которых:
формируют информацию, относящуюся к форме полосы движения, на основании информации о траектории движения рассматриваемого транспортного средства; и
редактируют информацию, относящуюся к форме полосы движения, сохранённую в базе данных, на основании сформированной информации, относящейся к форме полосы движения.
15. Способ сохранения картографических данных по п.14, содержащий этапы, на которых:
формируют линию границы полосы движения в качестве формы полосы движения на основании информации о траектории движения рассматриваемого транспортного средства и ширины полосы движения в качестве информации об атрибутах дороги; и
редактируют информацию в отношении линии границы полосы движения, сохранённую в базе данных, на основании сформированной линии границы полосы движения.
16. Способ сохранения картографических данных по любому из пп.1-3, содержащий этап, на котором
изменяют форму соответствующей полосы движения, сохранённую в базе данных, на основании формы полосы движения, расположенной перед и/или за соответствующей полосой движения.
17. Устройство сохранения картографических данных, содержащее контроллер, выполненный с возможностью получения содержимого картографических данных, используемого в рассматриваемом транспортном средстве, и сохранения содержимого картографических данных в базе данных, причем контроллер дополнительно выполнен с возможностью:
назначения уровня приоритета содержимому картографических данных;
получения в качестве содержимого картографических данных с более высоким уровнем приоритета по меньшей мере одного из линии границы полосы движения и соединения полос движения;
преобразования формата полученного содержимого картографических данных, включающего в себя линию границы полосы движения и соединение полос движения, в заданный формат, который позволяет использовать содержимое картографических данных в рассматриваемом транспортном средстве;
сохранения содержимого картографических данных, преобразованного в заданный формат, в базе данных;
получения информации обновления, относящейся к содержимому картографических данных, сохранённого в базе данных; и
редактирования содержимого картографических данных в заданном формате, сохранённого в базе данных, на основании полученной информации обновления.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| EP 0807803 A2, 19.11.1997 | |||
| DE 20201310341 A1, 10.10.2013 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

