ОБЛАСТЬ ТЕХНИКИ
Изобретение относится в целом к малоинвазивной сосудистой интервенционной хирургии и, более конкретно, к технологии управления катетером и направляющей проволокой в ведомом движителе робота интервенционной хирургии, а именно к ведомому движителю и способу управления интервенционным хирургическим роботом.
УРОВЕНЬ ТЕХНИКИ
Почти 30 миллионов человек ежегодно умирают от сердечно-сосудистых и цереброваскулярных заболеваний, что составляет около 30% всех заболеваний. Среди них почти 300 миллионов человек в Китае страдают сердечно-сосудистыми и цереброваскулярными заболеваниями. Сердечно-сосудистые и цереброваскулярные заболевания стали одной из трех основных причин смерти от болезней, серьезно влияющих на здоровье людей и их нормальную жизнь.
Малоинвазивная интервенционная терапия сердечно-сосудистых и цереброваскулярных заболеваний является основным методом лечения сердечно-сосудистых и цереброваскулярных заболеваний. По сравнению с традиционной хирургией она имеет очевидные преимущества, такие как небольшой разрез и быстрое послеоперационное восстановление. Сердечно-цереброваскулярное вмешательство - это процесс, при котором врач вручную вводит катетеры, направляющие проволоки и стенты в тело пациента для завершения процедуры.
Интервенционная хирургия имеет следующие две проблемы. Во-первых, во время операции ДСА испускает рентгеновские лучи, быстро иссякает физическая сила врача, также снижаются внимание и устойчивость, что приводит к снижению точности операции, и врач склонен к неправильным толкающим усилиям, что приводит к несчастным случаям, таким как повреждение интимы сосудов, перфорация и разрыв сосудов, и ставит под угрозу жизнь пациентов. Во-вторых, накопленный вред от длительного ионизирующего излучения значительно увеличивает риск того, что врачи будут страдать от лейкемии, рака и острой катаракты. Феномен, когда врачи продолжают накапливать радиацию из-за интервенционной хирургии, когда происходит нанесение вреда профессиональной жизни врачей и ограничивается развитие интервенционной хирургии, стал проблемой, которую нельзя игнорировать.
Хирургический метод телеоперации катетеров и направляющей проволоки с помощью робототехники позволяет эффективно справиться с этой проблемой, а также может значительно повысить точность и стабильность хирургической операции. В то же время он может эффективно уменьшить лучевое повреждение врача интервенционной терапии и снизить вероятность возникновения интраоперационных несчастных случаев. Поэтому вспомогательные роботы для сердечно-церебральной сосудистой интервенционной хирургии привлекают все большее внимание и постепенно становятся ключевыми объектами исследований и разработок в области медицинских роботов в современных научно-технических державах.
Зарубежные сосудистые хирургические роботы были изучены относительно первыми, но они еще не полностью достигли клинического применения. Отечественные исследования, связанные с этим, начались относительно поздно, в основном включая Пекинский технологический институт, Тяньцзиньский технологический университет, Бэйханский университет и Харбинский технологический институт.
В настоящее время сосудистые интервенционные хирургические роботы в основном используют структуру "ведущий-ведомый" для изоляции врачей от радиоактивности. Например, заявка Тяньцзиньского технологического университета, номер 201410206956.7, дата публикации патента на изобретение от 17 сентября 2014 года, в котором раскрывается ведомое операционное устройство вспомогательной системы малоинвазивной сосудистой хирургии по типу ведущий-ведомый. Устройство включает в себя осевой толкающий блок, вращающийся блок, захватный блок, хирургический катетер, блок определения воздействующей силы и регулируемое основание. Его методы работы включают обнаружение сигнала, передачу, обработку, действие. Превосходство заключается в том, что устройство может имитировать хирургическую операцию врача, достигается высокая точность операции, при этом может быть эффективно улучшена безопасность операции. Есть возможность регулировать угол положения интервенции, также используется материал из алюминиевого сплава, который является небольшим по размеру и легким по весу. Изобретение хорошо завершает введение направляющей проволоки и использует магнитореологическую жидкость для реализации тактильной обратной связи. Другой пример, заявка Пекинского Университета аэронавтики и астронавтики, номер 201210510169.2, дата публикации 17 сентября 2014 года. В патентном документе раскрывается телеоперационный сосудистый интервенционный робот по типу ведущий-ведомый. Робот включает в себя главный концевой механизм управления, ведомый концевой движительный механизм и контроллер PMAC. Главный механизм управления - это рабочие руки врача. Ведомый движительный механизм используется в качестве исполнительного механизма робота для завершения функции перемещения катетера. Блок управления PMAC используется для реализации взаимодействия между ведущим механизмом управления и ведомым движительным механизмом. Робот использует телеоперацию по структуре ведущий-ведомый для оказания помощи врачам в выполнении операций, а движительный механизм ведомого конца реализует осевую подачу и кольцевое вращение катетера.
Однако вышеприведенные решения по-прежнему имеют следующие недостатки:
(1) Дезинфекция робота затруднительна и не соответствует фактическим хирургическим требованиям;
(2) Конструкция относительно раздута и сложна, велика по размеру, неудобна в установке и недостаточно гибка;
(3) Разборка и сборка направляющей проволоки катетера неудобны, и заменить направляющую проволоку катетера во время операции непросто;
(4) Невозможно продвигать и вращать направляющую проволоку одновременно. Эта операция очень практична в реальной хирургии;
(5) Устройство склонно к скольжению во время продвижения направляющей проволоки, что влияет на хирургическую производительность.
Таким образом, обеспечение движителя интервенционного хирургического робота и способа управления, облегчающего управление движением и вращением катетера и направляющей проволоки, является актуальной проблемой для специалистов в данной области.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее раскрытие в целом относится к ведомому движителю и способу управления интервенционным хирургическим роботом, который управляет движением и вращением катетера и направляющей проволоки.
Для достижения вышеуказанных целей предусмотрен ведомый движитель для интервенционного хирургического робота. Устройство включает в себя передаточную часть, скользящую часть, толкающую часть, трущуюся часть, зажимную часть, вращающуюся часть катетера и подвижную часть шагового двигателя.
Трущаяся часть, зажимная часть, вращающаяся часть катетера и подвижная часть шагового двигателя установлены и закреплены на корпусе.
Передаточная часть сконфигурирована для передачи крутящего момента подвижной части шагового двигателя на скользящую часть и толкающую часть. Скользящая часть сконфигурирована для приведения направляющей проволоки в возвратно-поступательное движение. Толкающая часть и зажимная часть взаимодействуют, чтобы зажать или ослабить направляющую проволоку. Трущаяся часть сконфигурирована так, чтобы приводить направляющую проволоку во вращение. Вращающаяся часть катетера сконфигурирована так, чтобы зажимать катетер и толкать катетер внутрь или выводить катетер из кровеносного сосуда.
Описанное здесь устройство, ведомый движитель для интервенционного хирургического робота, может управлять перемещением и выводом катетера и направляющей проволоки в сосудистой интервенционной операции, а также одновременным вращением направляющей проволоки и может осуществлять непрерывное движение с помощью возвратно-поступательного движения. Операция может быть простой и в то же время точной. Устройство также может выполнить работу врача с направляющей проволокой в сосудистой интервенционной операции и добиться дистанционного управления роботом для завершения операции, что значительно снижает риск получения большего количества рентгеновских лучей и защищает тело врача.
В предпочтительном варианте осуществления передаточная часть ведомого движителя для интервенционного хирургического робота, описанного выше, включает в себя несколько миниатюрных подшипников, установленных на соединительном элементе. Коническая шестерня с длинным валом и цилиндрическая шестерня с длинным валом собраны, закреплены и соосно установлены на соединительном элементе. Коническая шестерня с длинным валом соединена с конической шестерней. На соединительном элементе через миниатюрные подшипники установлена цилиндрическая шестерня с коротким валом. Бобышки цилиндрической шестерни с длинным валом и цилиндрической шестерни с коротким валом соединены соответственно с шатуном кривошипно-шатунного механизма и линейным шатуном. Коническая шестерня и кулачковая группа фиксируются стопорным кольцом. На соединительном элементе установлена сквозная коническая шестерня, зацепленная с конической шестерней. Когда коническая шестерня с длинным валом вращается, она приводит коническую шестерню в движение синхронно. Бобышки цилиндрической шестерни с длинным валом и цилиндрической шестерни с коротким валом соединены соответственно с шатуном кривошипно-шатунного механизма и линейным шатуном. Когда цилиндрическая шестерня вращается, эксцентричная бобышка может управлять двумя шатунами, чтобы выполнить передвижение, после поворота по кругу может выполнять возвратно-поступательные движения. Когда коническая шестерня вращается, кулачковая группа также будет следовать за конической шестерней, чтобы двигаться синхронно. Коническая шестерня с сквозным отверстием вращается, а затем приводит коническую шестерню в движение, чтобы следовать за вращением; через серию комбинаций передач вращающая сила может быть передана в то место, где она необходима.
В предпочтительном варианте осуществления ведомого движителя для интервенционного хирургического робота шатун кривошипно-шатунного механизма и линейный шатун соединены соответственно с дистальным соединительным элементом и проксимальным соединительным элементом. Вторая линейная рельсовая направляющая закреплена на опорной поверхности корпуса. Миниатюрный ползун выполнен с возможностью взаимодействия со второй линейной рельсовой направляющей и соответственно закреплен на дистальном соединительном элементе и проксимальном соединительном элементе. Ползун на первой линейной рельсовой направляющей сконфигурирован так, чтобы двигаться вдоль миниатюрного ползуна. Дистальный соединительный элемент ползуна закреплен на ползуне первой линейной рельсовой направляющей. Верхний конец соединительного элемента дистального ползуна соединен с узким ползуном. Толкатель сконфигурирован так, чтобы проходить через узкий ползун. Канавчатая часть толкателя крепится к кулачковой поверхности кулачковой группы. Электромагнит соединен с узким ползуном. Когда электромагнит находится под напряжением и может поглощать соответствующую медицинскую резиновую пластину с железной наружной стенкой, он может контактировать с направляющей проволокой. Когда электромагнит теряет электричество и магнетизм, медицинскую резиновую пластину можно отделить для достижения быстрого эффекта разъединения.
В предпочтительном варианте осуществления ведомого движителя для интервенционного хирургического робота толкающая часть может включать в себя левый кронштейн и правый кронштейн, закрепленные на опорной поверхности корпуса. Миниатюрный подшипник и малый миниатюрный подшипник сконфигурированы таким образом, чтобы соответственно проходить через кулачковую группу и фиксироваться на левом кронштейне и правом кронштейне, таким образом уменьшая трение при вращении. Кулачковая группа может вращаться и использоваться в сочетании с толкателем для зажима и ослабления направляющей проволоки.
В предпочтительном варианте осуществления ведомого движителя для интервенционного хирургического робота на корпусе закреплены третья линейная рельсовая направляющая и первый моторный кронштейн. Прямоугольная соединительная пластина, соединенная с ползуном третьей линейной рельсовой направляющей, выполнена с возможностью соединения с резьбовой гайкой, пропущенной через первый шаговый двигатель. На прямоугольной соединительной пластине установлены две миниатюрные линейные рельсовые направляющие и первый ползун. На первом ползуне установлен зажимной соединитель, а шестерня с возможностью вращения соединена с прямоугольной соединительной пластиной. Первый шаговый двигатель сконфигурирован так, чтобы проходить через шестерню. Шестерня сцепляется с зажимным соединителем. Управляя прямым вращением первого шагового двигателя, два зажимных соединителя могут перемещаться относительно друг друга, так что зажимная часть может быть разжата, а первый шаговый двигатель может управляться вращением в обратном направлении, что может зажимать внутренние части стерилизационной коробки. Удлинительный вал может гарантировать, что вал первого шагового двигателя всегда находится в шестерне во время вертикального перемещения прямоугольной соединительной пластины.
В предпочтительном варианте осуществления ведомого движителя для интервенционного хирургического робота на корпусе закреплена четвертая линейная рельсовая направляющая, а на втором ползуне установлен ползунковый соединитель. Второй шаговый двигатель сконфигурирован так, чтобы проходить через ползунковый винтовой разъем. Второй кронштейн двигателя закреплен на корпусе и соединен со вторым шаговым двигателем. Управляя прямым вращением второго шагового двигателя, устройство может быть выдвинуто вперед, направляющая проволока зажата, поскольку положение пластины, закрепленной на направляющей проволоке, относительно неподвижно. Регулируя количество оборотов вращения второго шагового двигателя, можно также регулировать усилие зажима направляющей проволоки; при управлении вторым шаговым двигателем в обратном направлении устройство может быть перемещено назад, что может ослабить направляющую проволоку и облегчить снятие направляющей проволоки.
В предпочтительном варианте осуществления ведомого движителя для интервенционного хирургического робота на корпусе закреплен соединитель квадратного кронштейна, соединенный с третьим шаговым двигателем. Верхняя сторона соединителя квадратного кронштейна сконфигурирована для подключения к пятой линейной рельсовой направляющей. Верхняя сторона третьего ползуна, установленного на пятой линейной рельсовой направляющей, сконфигурирована для соединения с третьим кронштейном двигателя. Винтовая гайка сконфигурирована так, чтобы проходить через третий шаговый двигатель и соединяться с третьим кронштейном двигателя. Управляя прямым вращением третьего шагового двигателя, третий шаговый двигатель может быть выдвинут вперед, чтобы зажать катетер. Управляя обратным вращением третьего шагового двигателя, третий шаговый двигатель может быть сдвинут назад, чтобы ослабить катетер, катетер может быть удален. При взаимодействии со стерилизационной коробкой и прямом вращении третьего шагового двигателя катетер зажимается из-за силы трения, индуцируемой двумя фрикционными колесами, и катетер может быть выдвинут вперед и войти в кровеносный сосуд. В то время как третий шаговый двигатель поворачивается, катетер может быть отодвинут назад и выйти из кровеносного сосуда.
В предпочтительном варианте осуществления ведомого движителя для интервенционного хирургического робота на корпусе закреплена шестая линейная рельсовая направляющая. Четвертый ползун сконфигурирован для взаимодействия с шестой линейной рельсовой направляющей. Стойка и соединительная пластина установлены и закреплены гайкой. Соединительная пластина выполнена с возможностью закрепления с помощью множества четвертых шаговых двигателей, причем один из четвертых шаговых двигателей выполнен с возможностью сопряжения с винтом и прохождения через винтовую гайку на опорной поверхности корпуса, а другой четвертый шаговый двигатель выполнен с возможностью прохождения через сквозную коническую шестерню на опорной поверхности корпуса. Управление прямым вращением четвертого шагового двигателя может заставить вращаться коническую шестерню. Поскольку есть два ползуна с медицинской резиновой пластиной, два компонента могут попеременно толкать направляющую проволоку вперед, так что направляющая проволока может непрерывно толкаться вперед в кровеносные сосуды. Когда четвертый шаговый двигатель управляется реверсом, направляющая проволока может непрерывно выталкиваться из кровеносного сосуда. Управление третьим шаговым двигателем для вращения вперед может привести винт в движение, а при осуществлении движения другой стороны трущейся части две группы пластин перемещаются относительно, что реализует восходящее движение направляющей проволоки. Управление третьим шаговым двигателем для реверса может реализовать нисходящее движение направляющей проволоки.
В другом аспекте предусмотрен способ управления ведомым движителем интервенционного хирургического робота. Способ включает передачу крутящего момента подвижной части шагового двигателя на скользящую часть и толкающую часть через передаточную часть; скользящая часть многократно перемещает направляющую проволоку назад и вперед, зажимая и ослабляя направляющую проволоку через толкающую часть и зажимную часть совместно, тем самым приводя в движение направляющую проволоку;
многократное перемещение толкающей части, зажимной части и трущейся части вверх и вниз, тем самым приведение направляющей проволоки во вращение;
зажимать катетер и вращательно вводить катетер в кровеносный сосуд или извлекать его из него через вращающуюся часть катетера.
В предпочтительном варианте осуществления способа управления ведомым движителем интервенционного хирургического робота скользящая часть выполнена с возможностью зажима направляющей проволоки заряженным электромагнитом, что делает ее простой в эксплуатации и стабильной в управлении.
Из приведенных выше технических решений можно узнать, что по сравнению с предшествующим уровнем техники настоящее изобретение обеспечивает ведомый движитель для интервенционного хирургического робота и способ управления, который имеет следующие полезные свойства:
1. Ведомый движитель для интервенционного хирургического робота инновационно использует возвратно-поступательную механическую конструкцию, которая значительно уменьшает объем устройства.
2. Ведомый движитель для интервенционного хирургического робота настоящего изобретения имеет простую общую конструкцию, использует модульную конструкцию, легко разбирается и собирается, имеет компактную конструкцию и может быть изготовлено из пластика, имеет легкий общий вес и низкую стоимость изготовления.
3. Возвратно-поступательный механизм робота интервенционной хирургии в настоящем изобретении осуществляет зажим направляющей проволоки. Инновационное использование кулачковой группы приводит в движение конструкцию c кривошипно-шатунным механизмом. Реверсивная сила пружины может плотно присоединить толкатель сквозь поверхность кулачка. Вращение шагового двигателя осуществляет попеременное зажимание и ослабление направляющей проволоки, тем самым способствуя завершению процесса возвратно-поступательного движения.
4. Способ управления возвратно-поступательным механизмом интервенционного хирургического робота в настоящем изобретении позволяет реализовать зажим, ослабление, толкание и удаление направляющей проволоки путем управления устройством, которое может работать непрерывно без переключения операций в середине, что является простым и удобным, и может соответствовать всем требованиям к направляющим проволокам в сосудистой интервенционной хирургии.
5. Биомеханическая резьбонакатная структура, принятая настоящим изобретением, соответствует фактическим рабочим привычкам врачей. В то же время также может реализоваться одновременное завершение продвижения направляющей проволоки и вращения направляющей проволоки, что соответствует требованиям операции в реальной хирургии.
6. Направляющая проволока и катетер могут управляться для одновременного движения, достигается точность работы и может осуществляется функция установки стента, что соответствует требованиям в реальной операции.
7. Относительно закрытая конструкция имеет лучшую защиту для внутренних двигателей и других компонентов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
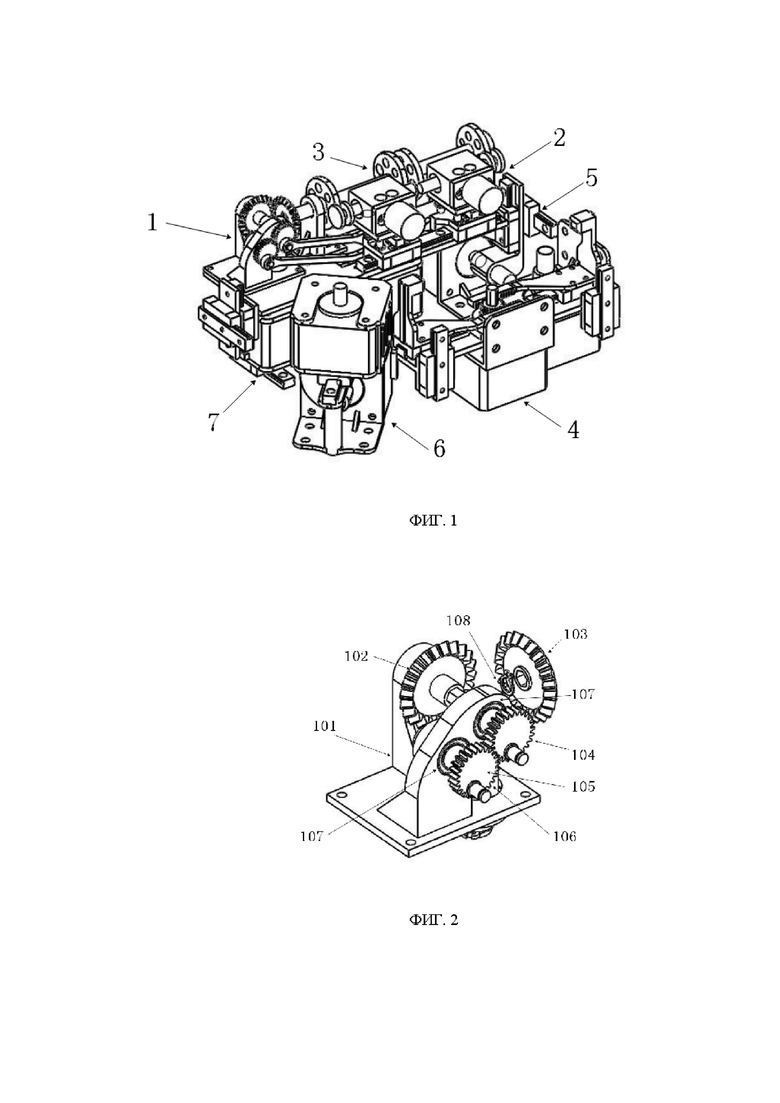
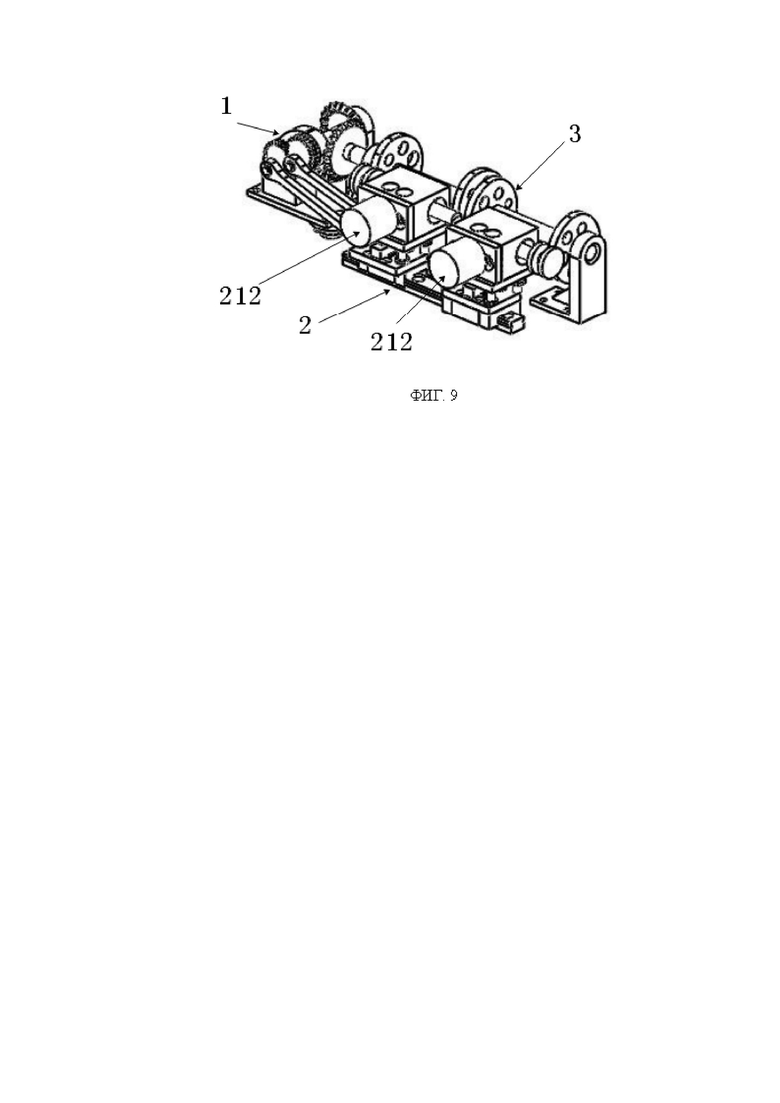
ФИГ. 1 Трехмерная структурная схема ведомого движителя интервенционного хирургического робота.
ФИГ. 2 Принципиальная схема передаточной части ведомого движителя интервенционного хирургического робота.
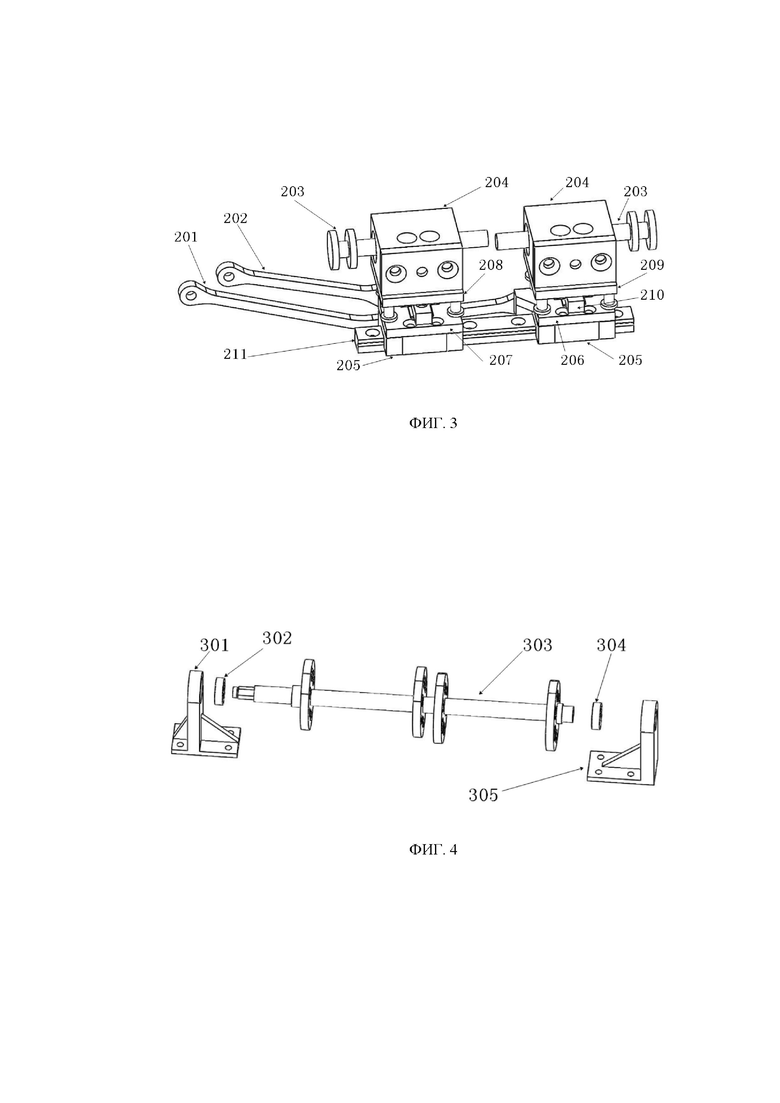
ФИГ. 3 Принципиальная схема скользящей части ведомого движителя интервенционного хирургического робота.
ФИГ. 4 Изображение в разобранном виде толкающей части ведомого движителя интервенционного хирургического робота.
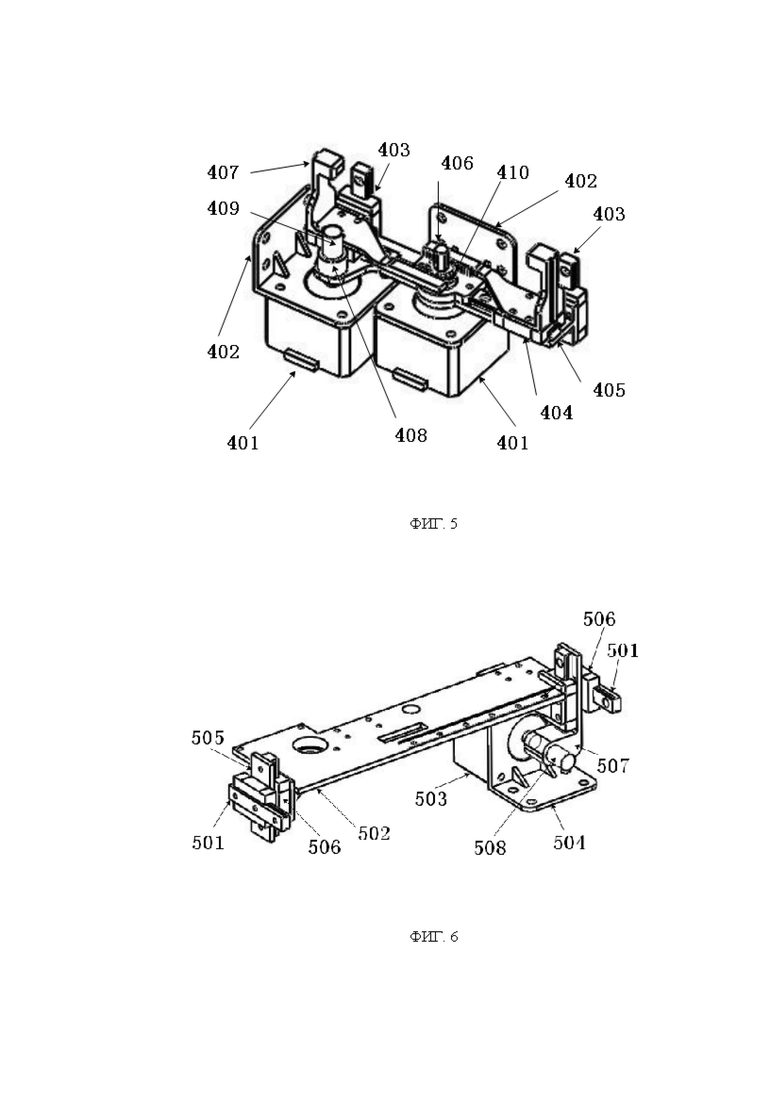
ФИГ. 5 Принципиальная схема трущейся части ведомого движителя интервенционного хирургического робота.
ФИГ. 6 Принципиальная схема зажимной части ведомого движителя интервенционного хирургического робота.
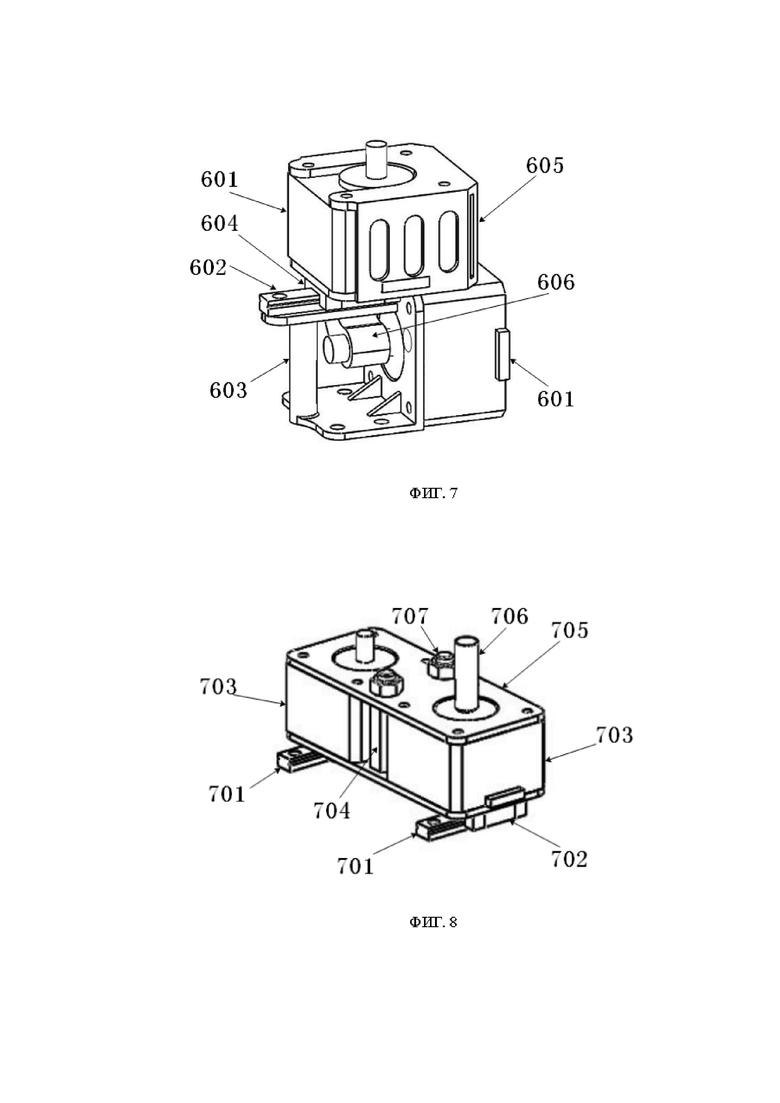
ФИГ. 7 Принципиальная схема конструкции вращающейся части катетера ведомого движителя интервенционного хирургического робота.
ФИГ. 8 Принципиальная схема подвижной части шагового двигателя ведомого движителя интервенционного хирургического робота.
ФИГ. 9 Структурная схема взаимодействия передаточной части, скользящей части и толкающей части.
В чертежах:
передаточная часть 1
соединительный элемент 101; коническая шестерня с длинным валом 102; коническая шестерня 103; цилиндрическая шестерня с длинным валом 104; цилиндрическая шестерня с коротким валом 105; сквозная коническая шестерня 106; миниатюрные подшипники 107; стопорное кольцо 108;
скользящая часть 2
шатун кривошипно-шатунного механизма 201; линейный шатун 202; толкатель 203; узкий ползун 204; миниатюрный ползун 205; дистальный соединительный элемент 206; проксимальный соединительный элемент 207; проксимальный соединительный элемент ползуна 208; дистальный соединительный элемент ползуна 209; первая линейная рельсовая направляющая 210; вторая линейная рельсовая направляющая 211; электромагнит 212;
толкающая часть 3
левый кронштейн 301; миниатюрные подшипники 302; кулачковая группа 303; малый миниатюрный подшипник 304; правый кронштейн 305;
трущаяся часть 4
первый шаговый двигатель 401; первый кронштейн двигателя 402; третья линейная рельсовая направляющая 403; первый ползун 404; прямоугольная соединительная пластина 405; удлинительный вал 406; зажимной соединитель 407; резьбовая гайка 408; первый винт 409; шестерня 410;
зажимная часть 5
четвертая линейная рельсовая направляющая 501; опорная пластина 502; второй шаговый двигатель 503; второй кронштейн двигателя 504; ползунковый соединитель 505; второй ползун 506; ползунковый винтовой соединитель 507, второй винт 508;
вращающаяся часть катетера 6
третий шаговый двигатель 601; пятая линейная рельсовая направляющая 602; соединитель квадратного кронштейна 603; третий ползун 604; третий кронштейн двигателя 605; винтовая гайка 606;
подвижная часть шагового двигателя 7
шестая линейная рельсовая направляющая 701; четвертый ползун 702; четвертый шаговый двигатель 703; стойка 704; соединительная пластина 705; третий винт 706; гайка 707.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Для обеспечения общего понимания принципов структуры, функции, производства и использования инструментов и методов, раскрытых в настоящем документе, будут приведены некоторые примеры вариантов осуществления. Один или несколько примеров этих вариантов осуществления проиллюстрированы на прилагаемых чертежах. Специалисты в данной области принимают во внимание, что инструменты и методы, описанные в настоящем документе и проиллюстрированные на прилагаемых чертежах, являются неограничивающими примерами осуществления и что объем настоящего раскрытия определяется исключительно формулой изобретения. Признаки, проиллюстрированные или описанные в связи с одним примером варианта осуществления, могут быть объединены с признаками других вариантов осуществления. Такие изменения и вариации должны быть включены в объем настоящего раскрытия.
Вариант осуществления 1
Ссылаясь на ФИГ. 1-9, настоящее изобретение представляет собой ведомый движитель интервенционного хирургического робота. Устройство включает в себя передаточную часть 1, скользящую часть 2, толкающую часть 3, трущуюся часть 4, зажимную часть 5, вращающуюся часть 6 катетера и подвижную часть 7 шагового двигателя. На корпусе установлены и закреплены трущаяся часть 4, зажимная часть 5, вращающаяся часть 6 катетера и подвижная часть 7 шагового двигателя. Передаточная часть выполнена с возможностью передачи крутящего момента подвижной части 7 шагового двигателя на скользящую часть 2 и толкающую часть 3. Скользящая часть 2 сконфигурирована для перемещения направляющей проволоки вперед и назад. Толкающая часть и зажимная часть взаимодействуют, чтобы зажать или ослабить направляющую проволоку. Трущаяся часть 4 сконфигурирована для приведения направляющей проволоки во вращение. Вращающаяся часть 6 катетера сконфигурирована так, чтобы зажимать катетер и вводить катетер внутрь или выводить катетер из кровеносного сосуда.
Для дальнейшего оптимизированного варианта исполнения на соединительном элементе 101 предусмотрено несколько миниатюрных подшипников 107. Коническая шестерня с длинным валом 102 и цилиндрическая шестерня с длинным валом 104 собраны, закреплены и соосно установлены на соединительном элементе 101. Коническая шестерня с длинным валом 102 соединена с конической шестерней 103. Цилиндрическая шестерня с коротким валом 105 установлена на соединительном элементе 101 через миниатюрные подшипники 107. Бобышки цилиндрической шестерни с длинным валом 104 и цилиндрической шестерни с коротким валом 105 соединены соответственно с шатуном кривошипно-шатунного механизма 201 и линейным шатуном 202. Коническая шестерня 103 и кулачковая группа 303 закреплены стопорным кольцом 108. На соединительном элементе 101 установлена сквозная коническая шестерня 106, зацепленная с конической шестерней 103.
Для дальнейшего оптимизированного варианта осуществления шатун кривошипно-шатунного механизма 201 и линейный шатун 202 соединены соответственно с дистальным соединительным элементом 206 и проксимальным соединительным элементом 207. Вторая линейная рельсовая направляющая 211 закреплена на опорной поверхности корпуса, при этом миниатюрный ползун 205 выполнен с возможностью взаимодействия со второй линейной рельсовой направляющей 211 и соответственно закреплена на дистальном соединительном элементе 206 и проксимальном соединительном элементе 207. Ползун на первой линейной рельсовой направляющей 210 сконфигурирован для перемещения вдоль миниатюрного ползуна 205. Дистальный соединительный элемент ползуна 209 закреплен на ползуне первой линейной рельсовой направляющей 210. Верхний конец дистального соединительного элемента ползуна 209 соединен с узким ползуном 204. Толкатель 203 выполнен с возможностью проникновения в узкий ползун 204. Канавчатая часть толкателя 203 прикреплена к кулачковой поверхности кулачковой группы 303. Электромагнит 212 соединен с узким ползуном 204.
Для дальнейшего оптимизированного варианта исполнения на опорной поверхности корпуса закреплены левый кронштейн 301 и правый кронштейн 305. Миниатюрный подшипник 302 и малый миниатюрный подшипник 304 сконфигурированы таким образом, чтобы соответственно проходить через кулачковую группу 303 и закрепляться на левом кронштейне 301 и правом кронштейне 305.
Для дальнейшего оптимизированного варианта исполнения на корпусе закреплены третья линейная рельсовая направляющая 403 и первый кронштейн двигателя 402. Прямоугольная соединительная пластина 405, соединенная с ползуном третьей линейной рельсовой направляющей 210, выполнена с возможностью соединения с резьбовой гайкой 408 через первый шаговый двигатель 401. Две миниатюрные линейные рельсовые направляющие и первый ползун 404 установлены на прямоугольной соединительной пластине 405. Зажимной соединитель 407 установлен на первом ползуне 404, а шестерня 410 вращательно соединена с прямоугольной соединительной пластиной 405. Первый шаговый двигатель 401 сконфигурирован так, чтобы проходить через шестерню 410. Шестерня 410 сцепляется с зажимным соединителем 407.
Для дальнейшего оптимизированного варианта исполнения на корпусе закреплена четвертая линейная рельсовая направляющая 501. Ползунковый соединитель 505 установлен на втором ползуне 506. Второй шаговый двигатель 503 сконфигурирован для прохождения через ползунковый винтовой соединитель 507. Второй кронштейн двигателя 504 закреплен на корпусе и соединен со вторым шаговым двигателем 503.
Для дальнейшего оптимизированного варианта исполнения на корпусе закреплен соединитель квадратного кронштейна 603, соединенный с третьим шаговым двигателем 601. Верхняя сторона квадратного кронштейна соединителя 603 сконфигурирована для соединения с пятой линейной рельсовой направляющей 602. Верхняя сторона третьего ползуна 604, установленного на пятой линейной рельсовой направляющей 602, выполнена с возможностью соединения с третьим кронштейном двигателя 605. Винтовая гайка 606 сконфигурирована так, чтобы проходить через третий шаговый двигатель 601 и соединяться с третьим кронштейном двигателя 605.
Для дальнейшего оптимизированного варианта исполнения на корпусе закреплена шестая линейная рельсовая направляющая 701. Четвертый ползун 702 сконфигурирован для взаимодействия с шестой линейной рельсовой направляющей 701. Стойка и соединительная пластина 705 соединены и закреплены гайкой 707. Соединительная пластина 705 сконфигурирована для закрепления с несколькими четвертыми шаговыми двигателями 703, причем один из четвертых шаговых двигателей сконфигурирован для сопряжения с третьим винтом 706 и прохождения через винтовую гайку на опорной поверхности корпуса, а другой четвертый шаговый двигатель 703 сконфигурирован для прохождения через сквозную коническую шестерню 106 на опорной поверхности корпуса.
Вариант осуществления 2
Предложен способ управления ведомым движителем интервенционного хирургического робота. Способ включает передачу силы кручения подвижной части шагового двигателя 7 на скользящую часть 2 и толкающую часть 3 через передаточную часть 1. Скользящая часть 2 многократно перемещает направляющую проволоку назад и вперед, зажимает и ослабляет направляющую проволоку через толкающую часть 3 и зажимную часть 5 совместно, тем самым приводя в движение направляющую проволоку;
многократное перемещение толкающей части 3, зажимной части 5 и трущейся части 4 вверх и вниз, тем самым приведение направляющей проволоки во вращение;
зажим катетера и вращательное введение катетера в кровеносный сосуд или извлечение из него через вращающуюся часть 6 катетера.
Для дальнейшего оптимизированного варианта исполнения скользящая часть 2 выполнена с возможностью зажима направляющей проволоки заряженным электромагнитом 212.
Специалист в данной области техники принимает во внимание дополнительные свойства и преимущества изобретения, основанные на вышеописанных вариантах. Соответственно, изобретение не должно ограничиваться тем, что было подробно показано и описано, за исключением случаев, указанных в прилагаемой формуле изобретения. Все публикации и ссылки, приведенные в настоящем документе, явным образом включены в него в полном объеме путем ссылки.
Группа изобретений относится к медицине, а именно к ведомым движителям для интервенционного хирургического робота. Ведомый движитель содержит передаточную часть, скользящую часть, толкающую часть, трущуюся часть, зажимную часть, вращающуюся часть катетера и подвижную часть шагового двигателя. Трущаяся часть, зажимная часть, вращающаяся часть катетера и подвижная часть шагового двигателя установлены и закреплены на корпусе. Передаточная часть выполнена с возможностью передачи крутящего момента подвижной части шагового двигателя к скользящей части и толкающей части. Скользящая часть сконфигурирована для приведения направляющей проволоки в возвратно-поступательное движение. Толкающая часть и зажимная часть выполнены с возможностью взаимодействия таким образом, чтобы осуществлять зажатие и ослабление направляющей проволоки. Трущаяся часть сконфигурирована для приведения направляющей проволоки во вращение. Вращающаяся часть катетера сконфигурирована для зажима катетера и введения катетера в кровеносный сосуд или извлечения катетера из него. Передаточная часть выполнена с возможностью передачи движения шатуну кривошипно-шатунного механизма и линейному шатуну, соединенным соответственно с дистальным соединительным элементом и проксимальным соединительным элементом, выполненными с возможностью перемещения посредством ползунов по второй линейной направляющей, закрепленной на опорной поверхности корпуса. Достигается облегчение управления движением и вращением катетера и направляющей проволоки. 2 н. и 6 з.п. ф-лы, 9 ил.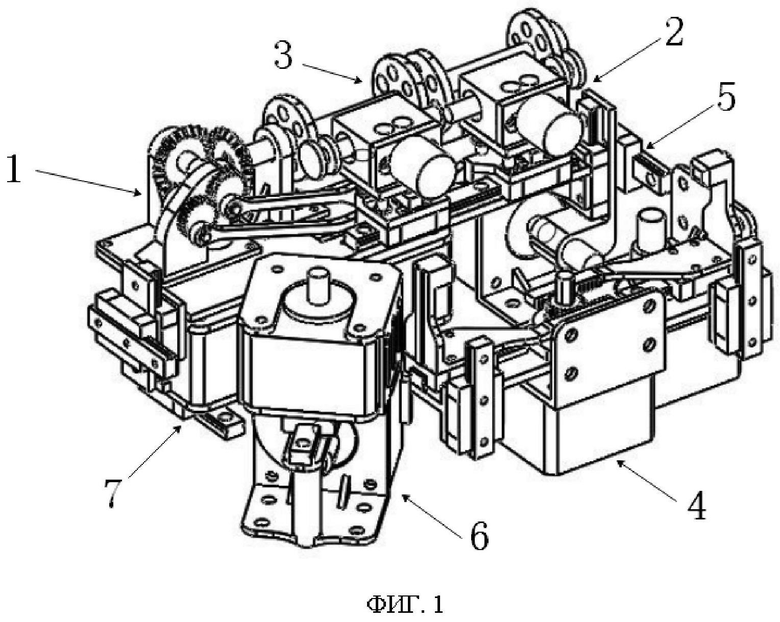
1. Ведомый движитель для интервенционного хирургического робота, содержащий: передаточную часть (1), скользящую часть (2), толкающую часть (3), трущуюся часть (4), зажимную часть (5), вращающуюся часть (6) катетера и подвижную часть (7) шагового двигателя; при этом трущаяся часть (4), зажимная часть (5), вращающаяся часть (6) катетера и подвижная часть (7) шагового двигателя установлены и закреплены на корпусе; передаточная часть выполнена с возможностью передачи крутящего момента подвижной части (7) шагового двигателя к скользящей части (2) и толкающей части (3); скользящая часть (2) сконфигурирована для приведения направляющей проволоки в возвратно-поступательное движение; толкающая часть и зажимная часть выполнены с возможностью взаимодействия таким образом, чтобы осуществлять зажатие и ослабление направляющей проволоки; трущаяся часть (4) сконфигурирована для приведения направляющей проволоки во вращение; вращающаяся часть катетера (6) сконфигурирована для зажима катетера и введения катетера в кровеносный сосуд или извлечения катетера из него, отличающийся тем, что передаточная часть выполнена с возможностью передачи движения шатуну кривошипно-шатунного механизма (201) и линейному шатуну (202), соединенным соответственно с дистальным соединительным элементом (206) и проксимальным соединительным элементом (207), выполненными с возможностью перемещения посредством ползунов (205) по второй линейной направляющей (211), закрепленной на опорной поверхности корпуса; ползуны (204), установленные на первой линейной рельсовой направляющей (210), выполнены с возможностью совместного перемещения с ползунами (205); толкатель (203) выполнен с возможностью прохождения через ползун (204); канавчатая часть толкателя (203) закреплена на кулачковой поверхности кулачковой группы (303); электромагнит (212) соединен с узким ползуном (204); на корпусе закреплена третья линейная рельсовая направляющая (403) с ползуном, соединенным с прямоугольной соединительной пластиной (405), выполненной с возможностью соединения с резьбовой гайкой (408), установленной на валу первого шагового двигателя (401) и содержащей две линейные рельсовые направляющие и ползун (404) с установленным на нем зажимным соединителем (407), при этом шестерня (410) вращательно соединена с прямоугольной соединительной пластиной (405), а первый шаговый двигатель (401) сконфигурирован для прохождения через шестерню (410), выполненную с возможностью зацепления с зажимным соединителем (407); на корпусе закреплена четвертая линейная рельсовая направляющая (501); ползунковый соединитель (505) установлен на втором ползуне (506); второй шаговый двигатель (503) выполнен с возможностью прохождения через ползунковый винтовой соединитель (507); и второй кронштейн двигателя (504) закреплен на корпусе и соединен со вторым шаговым двигателем (503).
2. Устройство по п. 1, отличающееся тем, что передаточная часть (1) дополнительно включает подшипники (107), установленные на соединительном элементе (101); при этом коническая шестерня с длинным валом (102) и цилиндрическая шестерня с длинным валом (104) и бобышкой собраны, закреплены и соосно установлены на соединительном элементе (101); коническая шестерня с длинным валом (102) соединена с конической шестерней (103); цилиндрическая шестерня с коротким валом (105) и бобышкой установлена на соединительном элементе (101) через подшипники (107); бобышка цилиндрической шестерни с длинным валом (104) и цилиндрическая шестерня с коротким валом (105) неподвижно соединены соответствующим образом с шатуном кривошипно-шатунного механизма (201) и линейным шатуном (202); коническая шестерня (103) и кулачковая группа (303) закреплены стопорным кольцом (108); а сквозная коническая шестерня (106), соединенная с конической шестерней (103), установлена на соединительном элементе (101).
3. Устройство по п. 1, отличающееся тем, что содержит соединительный элемент дистального ползуна (209), неподвижно соединенный с ползуном первой линейной рельсовой направляющей (210), при этом верхний конец соединительного элемента дистального ползуна (209) соединен с ползуном (204).
4. Устройство по п. 1, отличающееся тем, что на опорной поверхности корпуса закреплены левый кронштейн (301) и правый кронштейн (305); а подшипник (302) и малый подшипник (304) выполнены с возможностью прохождения соответственно через кулачковую группу (303) и закреплены на левом кронштейне (301) и правом кронштейне (305).
5. Устройство по п. 1, отличающееся тем, что на корпусе закреплен соединитель квадратного кронштейна (603), соединенный с третьим шаговым двигателем (601); верхняя сторона соединителя квадратного кронштейна (603) выполнена с возможностью соединения с пятой линейной рельсовой направляющей (602); верхняя сторона третьего ползуна (604), установленного на пятой линейной рельсовой направляющей (602), выполнена с возможностью соединения с третьим моторным кронштейном (605); и винтовая гайка (606) выполнена с возможностью прохождения через третий шаговый двигатель (601) и соединения с третьим моторным кронштейном (605).
6. Устройство по п. 1, отличающееся тем, что на корпусе закреплена шестая линейная рельсовая направляющая (701); четвертый ползун (702) выполнен с возможностью взаимодействия с шестой линейной рельсовой направляющей (701); стойка и соединительная пластина (705) соединены гайкой (707); соединительная пластина (705) выполнена с возможностью фиксации с помощью четвертых шаговых двигателей (703); один из четвертых шаговых двигателей выполнен с возможностью сопряжения с третьим винтом (706) и прохождения через гайку винта на опорной поверхности корпуса, а другой четвертый шаговый двигатель (703) выполнен с возможностью прохождения через сквозное отверстие конической шестерни (106) на опорной поверхности корпуса.
7. Способ управления ведомым движителем для интервенционного хирургического робота по одному из пп. 1-6, включающий:
передачу крутящей силы подвижной части шагового двигателя (7) на скользящую часть (2) и толкающую часть (3) через передаточную часть (1), при этом передаточная часть передает движение на кулачковую группу и через шатун кривошипно-шатунного механизма (201) и линейный шатун (202) на ползуны (204) и (205);
приведение направляющей проволоки в возвратно-поступательное движение скользящей частью (2), при этом два ползуна осуществляют попеременное проталкивание направляющей проволоки;
зажим и ослабление направляющей проволоки за счет взаимодействия толкающей части (3) и зажимной части (5), тем самым приводя в движение направляющую проволоку, при этом в толкающей части (3) зажим и ослабление направляющей проволоки осуществляют посредством толкателя (203) и кулачковой группы (303), а в зажимной части (5) посредством регулирования вращения второго шагового двигателя (503), обеспечивающего перемещение зажимной части;
приведение толкающей части (3) и зажимной части (5) в возвратно-поступательное движение вверх и вниз трущейся частью (4), тем самым осуществляя приведение направляющей проволоки во вращение;
зажим катетера вращающейся частью катетера (6) и введение катетера внутрь или извлечение его из кровеносного сосуда.
8. Способ управления ведомым движителем интервенционного хирургического робота по п. 7, отличающийся тем, что скользящая часть (2) выполнена с возможностью зажима направляющей проволоки заряженным электромагнитом (212).
| CN 108309370 A, 24.07.2018 | |||
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| CN 108158656 A, 15.06.2018 | |||
| CN 103157170 A, 19.06.2013 | |||
| CN 108704214 A, 26.10.2018. | |||

