Изобретение относится к области навигационного приборостроения, в частности, к устройствам для определения углов крена и дифферента морских судов. Известны приборы, использующие для измерения угла крена  и дифферента
и дифферента  короткопериодные физические маятники или жидкостные уровни [патенты РФ №2100778; №2065572]. Их основная погрешность обусловлена влиянием дополнительных переносных (тангенциальных) ускорений, появляющихся при воздействии бортовой и килевой качки на приборы, установленные на мостике судна на значительном расстоянии от центра его качания. [Ривкин С.С. Теория гироскопических устройств // Л. "Судпромгиз", 1962, том 1, с. 249]. В зависимости от численных значений составляющих вектора отстояния места установки такого прибора от центра качания судна, а также интенсивности качки, эта погрешность может превышать истинные значения углов крена и дифферента в несколько раз. Для уменьшения этой погрешности используют электронные кренодифферентометры, в состав которых вводят помимо акселерометров еще и гироскопические датчики.
короткопериодные физические маятники или жидкостные уровни [патенты РФ №2100778; №2065572]. Их основная погрешность обусловлена влиянием дополнительных переносных (тангенциальных) ускорений, появляющихся при воздействии бортовой и килевой качки на приборы, установленные на мостике судна на значительном расстоянии от центра его качания. [Ривкин С.С. Теория гироскопических устройств // Л. "Судпромгиз", 1962, том 1, с. 249]. В зависимости от численных значений составляющих вектора отстояния места установки такого прибора от центра качания судна, а также интенсивности качки, эта погрешность может превышать истинные значения углов крена и дифферента в несколько раз. Для уменьшения этой погрешности используют электронные кренодифферентометры, в состав которых вводят помимо акселерометров еще и гироскопические датчики.
Для измерения углов крена  и дифферента
и дифферента  могут также использоваться инерциальные гировертикали, построенные на базе бесплатформенных инерциальных навигационных систем (БИНС) [Анучин О.Н., Емельянцев Г.И. Интегрированные системы ориентации и навигации для морских подвижных объектов // ГНЦ РФ-ЦНИИ «Электроприбор», 2003, с. 389]. Ошибки начальных условий, а также нескомпенсированные собственные погрешности трех датчиков угловой скорости (ДУС) и трех акселерометров вызывают в БИНС незатухающие колебания построителя вертикали с периодом Шулера, которые обычно демпфируются периодически по информации о линейной скорости объекта, вырабатываемой внешним источником, например судовым лагом. Однако в БИНС, построенной на основе грубых микромеханических датчиков, для обеспечения заданной погрешности построителя вертикали демпфирование с использованием внешней скорости должно проводиться непрерывно.
могут также использоваться инерциальные гировертикали, построенные на базе бесплатформенных инерциальных навигационных систем (БИНС) [Анучин О.Н., Емельянцев Г.И. Интегрированные системы ориентации и навигации для морских подвижных объектов // ГНЦ РФ-ЦНИИ «Электроприбор», 2003, с. 389]. Ошибки начальных условий, а также нескомпенсированные собственные погрешности трех датчиков угловой скорости (ДУС) и трех акселерометров вызывают в БИНС незатухающие колебания построителя вертикали с периодом Шулера, которые обычно демпфируются периодически по информации о линейной скорости объекта, вырабатываемой внешним источником, например судовым лагом. Однако в БИНС, построенной на основе грубых микромеханических датчиков, для обеспечения заданной погрешности построителя вертикали демпфирование с использованием внешней скорости должно проводиться непрерывно.
Полное отсутствие автономности, сложность построения бесплатформенной инерциальной гировертикали в целом определяют ее недостатки, к которым можно также отнести высокие требования к калибровке, большую стоимость и необходимость периодического обслуживания. В связи с чем БИНС не получили широкого распространения для их использования в качестве судового электронного кренодифферентометра.
За прототип судового электронного кренодифферентометра принято техническое решение, приведенное в [патент РФ №2486098]. Приведенное в прототипе устройство для определения угла наклона (крена и дифферента) по каждой из двух - продольной и поперечной осей объекта - содержит два акселерометра, два ДУС и два вычислительных модуля. При этом для выработки углов крена или дифферента по каждому каналу используется один акселерометр, один ДУС и один вычислитель. В прототипе акселерометр рассматривается в качестве датчика угла наклона с передаточной функцией  , а ДУС - с передаточной функцией
, а ДУС - с передаточной функцией  . Вычислительный модуль содержит звено с передаточной функцией
. Вычислительный модуль содержит звено с передаточной функцией  , через которое пропускается сумма сигналов акселерометра и ДУС, что позволяет устранить динамическую составляющую сигнала акселерометра, возникающую вследствие действия возмущений, например при волнении моря. При выполнении условия
, через которое пропускается сумма сигналов акселерометра и ДУС, что позволяет устранить динамическую составляющую сигнала акселерометра, возникающую вследствие действия возмущений, например при волнении моря. При выполнении условия  , вырабатываемый угол крена или дифферента в прототипе будет содержать низкочастотную составляющую сигнала акселерометра и высокочастотную составляющую сигнала ДУС.
, вырабатываемый угол крена или дифферента в прототипе будет содержать низкочастотную составляющую сигнала акселерометра и высокочастотную составляющую сигнала ДУС.
В настоящее время наиболее перспективными для применения в конструкции современных кренодифферентометров являются дешевые микромеханические гироскопы (далее - ММГ) и микромеханические акселерометры (далее - ММА), позволяющие уменьшить цену этих приборов и, соответственно, повысить их конкурентоспособность.
Особенностью ММГ являются большие значения погрешностей смещения нуля, которые к тому же могут изменяться при эксплуатации кренодифферентометра на длительном интервале времени. В силу этого, представленной в прототипе передаточной функции  , являющейся фильтром высоких частот первого порядка для сигнала ДУС, может быть недостаточно для подавления низкочастотных составляющих погрешностей ММГ, что, безусловно, может привести к росту погрешностей определения углов крена
, являющейся фильтром высоких частот первого порядка для сигнала ДУС, может быть недостаточно для подавления низкочастотных составляющих погрешностей ММГ, что, безусловно, может привести к росту погрешностей определения углов крена  и дифферента
и дифферента .
.
К недостаткам прототипа следует отнести, прежде всего, невозможность использования представленного устройства для измерения больших значений углов крена и дифферента в связи с тем, что:
- в выходных сигналах обоих ДУС  и
и  с взаимно ортогональными осями, расположенными в плоскости палубы, помимо полезного сигнала будут измеряться существенные значения составляющих угловой скорости рыскания судна и его циркуляции, которые могут быть скомпенсированы только при наличии дополнительного ДУС
с взаимно ортогональными осями, расположенными в плоскости палубы, помимо полезного сигнала будут измеряться существенные значения составляющих угловой скорости рыскания судна и его циркуляции, которые могут быть скомпенсированы только при наличии дополнительного ДУС  , ось чувствительности которого ориентирована по нормали к плоскости палубы;
, ось чувствительности которого ориентирована по нормали к плоскости палубы;
- по выходному сигналу  одного из двух взаимно ортогональных акселерометров, расположенных в плоскости палубы
одного из двух взаимно ортогональных акселерометров, расположенных в плоскости палубы  и
и  (
( ), вычисляются значения углов крена, погрешности измерения которых
), вычисляются значения углов крена, погрешности измерения которых  при приближении к углу
при приближении к углу  имеют недопустимо большие значения
имеют недопустимо большие значения  . Углы крена, близкие , могут быть измерены только при использовании третьего акселерометра
. Углы крена, близкие , могут быть измерены только при использовании третьего акселерометра  , нормального к плоскости палубы (
, нормального к плоскости палубы ( .
.
В связи с тем, что в соответствии с требованиями п. 5.27.2 "Правил по оборудованию морских судов, часть V Российского Морского Регистра Судоходства" электронные кренометры должны обеспечивать измерение текущего угла крена в диапазоне ±90°, прототип не сможет обеспечить эти требования.
Решаемые технические проблемы:
1. Повышение точности измерения крена и дифферента в условиях действия переносных ускорений на больших углах качки судна с помощью электронного кренодифферентометра.
2. Выполнение требований п. 5.27.2 "Правил по оборудованию морских судов, часть V Российского Морского Регистра Судоходства" в части измерений углов крена в диапазоне ± 90°.
3. Совершенствование конструкции кренодифферентометра путем применения дешевых ММГ и ММА с целью уменьшения стоимости прибора, обеспечивающих при этом требуемую точность работы кренодифферентометра, в том числе, и на длительных интервалах времени.
Технический результат - повышения точности измерения крена и дифферента и расширение диапазона их измерения.
Кроме того обеспечивается снижение цены прибора путем применения в его конструкции дешевых микромеханических датчиков.
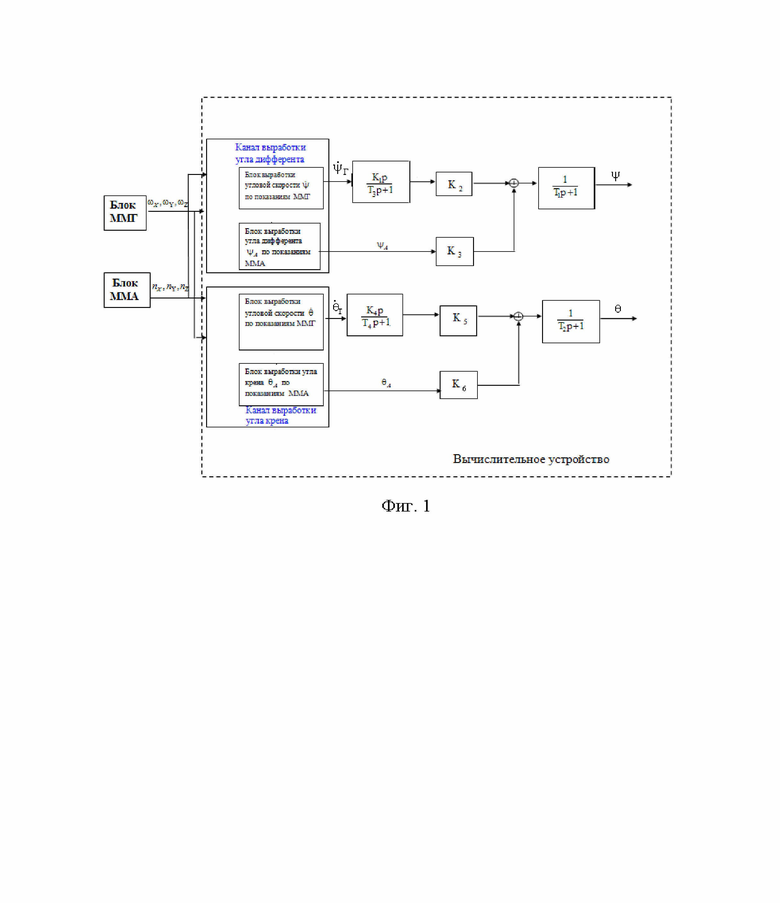
Предлагаемое устройство представляет собой инерциальный измерительный модуль, содержащий триаду ММГ (далее - блок ММГ), триаду ММА (далее - блок ММА) с взаимно ортогональными осями чувствительности и вычислительное устройство. В вычислительном устройстве формируются значения угловых скоростей изменения углов крена и дифферента и самих значений этих углов, и далее производится фильтрация динамических погрешностей выработки углов крена и дифферента от действия переносных ускорений.
На фиг. 1 показана блок-схема, включающая выработку трех измерительных сигналов блока ММГ и трех измерительных сигналов блока ММА и их обработку в вычислительном устройстве кренодифферентометра.
В вычислительном устройстве производятся следующие действия:
1. По показаниям блока ММГ формируются угловые скорости изменения углов крена  и дифферента
и дифферента  :
:

где:
 - выходной сигнал с оси чувствительности ММГ, расположенной по оси судна X, образованной пересечением плоскости мидель-шпангоута и основной плоскости (положительное направление - на правый борт);
- выходной сигнал с оси чувствительности ММГ, расположенной по оси судна X, образованной пересечением плоскости мидель-шпангоута и основной плоскости (положительное направление - на правый борт);
 - выходной сигнал с оси чувствительности ММГ, расположенной по продольной оси судна Y, образованной пересечением диаметральной плоскости и основной плоскости;
- выходной сигнал с оси чувствительности ММГ, расположенной по продольной оси судна Y, образованной пересечением диаметральной плоскости и основной плоскости;
 - выходной сигнал с оси чувствительности ММГ, расположенной по оси судна Z, образованной пересечением диаметральной плоскости и плоскости мидель-шпангоута (положительное направление - вверх).
- выходной сигнал с оси чувствительности ММГ, расположенной по оси судна Z, образованной пересечением диаметральной плоскости и плоскости мидель-шпангоута (положительное направление - вверх).
2. По показаниям блока ММА формируются углы крена  и дифферента
и дифферента  :
:

где:
 - выходной сигнал с оси чувствительности ММА, расположенной по оси судна X, образованной пересечением плоскости мидель-шпангоута и основной плоскости (положительное направление - на правый борт);
- выходной сигнал с оси чувствительности ММА, расположенной по оси судна X, образованной пересечением плоскости мидель-шпангоута и основной плоскости (положительное направление - на правый борт);
 - выходной сигнал с оси чувствительности ММА, расположенной по продольной оси судна Y, образованной пересечением диаметральной плоскости и основной плоскости;
- выходной сигнал с оси чувствительности ММА, расположенной по продольной оси судна Y, образованной пересечением диаметральной плоскости и основной плоскости;
 - выходной сигнал с оси чувствительности ММА, расположенной по оси судна Z, образованной пересечением диаметральной плоскости и плоскости мидель - шпангоута (положительное направление - вверх);
- выходной сигнал с оси чувствительности ММА, расположенной по оси судна Z, образованной пересечением диаметральной плоскости и плоскости мидель - шпангоута (положительное направление - вверх);
g - ускорение силы тяжести.
3. Сигналы угловой скорости  (1) и
(1) и  (2), формируемые по информации блока ММГ, пропускаются соответственно через фильтры высоких частот (далее - ФВЧ)
(2), формируемые по информации блока ММГ, пропускаются соответственно через фильтры высоких частот (далее - ФВЧ)  и
и  ,
,
где:
 - коэффициент усиления ФВЧ
- коэффициент усиления ФВЧ  ;
;
 - коэффициент усиления ФВЧ
- коэффициент усиления ФВЧ  ;
;
p= оператор дифференцирования;
оператор дифференцирования;
 - постоянная времени ФВЧ
- постоянная времени ФВЧ  ;
;
 - постоянная времени ФВЧ
- постоянная времени ФВЧ  .
.
4. Далее сигналы угловой скорости с выхода ФВЧ и сигналы углов качки (3) и (4) пропускаются, соответственно, через безынерционные звенья c коэффициентами усиления  и
и  ,
, и, полученные таким образом, выходные сигналы этих звеньев суммируются,
и, полученные таким образом, выходные сигналы этих звеньев суммируются,
где:
 - коэффициент усиления безынерционного звена в канале выработки угловой скорости по показаниям ММГ;
- коэффициент усиления безынерционного звена в канале выработки угловой скорости по показаниям ММГ;
 - коэффициент усиления безынерционного звена в канале выработки угловой скорости по показаниям ММГ;
- коэффициент усиления безынерционного звена в канале выработки угловой скорости по показаниям ММГ;
 - коэффициент усиления безынерционного звена в канале выработки угла дифферента по показаниям ММА;
- коэффициент усиления безынерционного звена в канале выработки угла дифферента по показаниям ММА;
 - коэффициент усиления безынерционного звена в канале выработки угла крена по показаниям ММА.
- коэффициент усиления безынерционного звена в канале выработки угла крена по показаниям ММА.
5. Полученная сумма сигналов далее пропускается через соответствующие апериодические звенья  и
и  , представляющие собой фильтры низких частот (далее - ФНЧ), выходом которых являются углы крена
, представляющие собой фильтры низких частот (далее - ФНЧ), выходом которых являются углы крена  и дифферента
и дифферента  судна,
судна,
где:
Т1 - постоянная времени ФНЧ ;
Т2 - постоянная времени ФНЧ .
Условием работы представленной схемы (фиг. 1) является выполнение следующих соотношений:  =
= ,
,  =
= ,
,  ,
,  ,
,  =1,
=1,  =1,
=1,  ,
,  , обеспечивающих достижение принципа инвариантности, благодаря которому применяемые в схеме ФВЧ и ФНЧ не оказывают влияния на выработку выходной информации схемы - углов крена и дифферента, представляющих в этом случае комбинацию низкочастотной и высокочастотной составляющих сигналов, формируемых соответственно по информации блоков ММА и ММГ. В результате в полученных значениях углов крена и дифферента, практически полностью устраняются, прежде всего, погрешности ММА, возникающие вследствие действия на качке переносных ускорений, а также погрешности, обусловленные нестабильностью смещений нулей ММГ.
, обеспечивающих достижение принципа инвариантности, благодаря которому применяемые в схеме ФВЧ и ФНЧ не оказывают влияния на выработку выходной информации схемы - углов крена и дифферента, представляющих в этом случае комбинацию низкочастотной и высокочастотной составляющих сигналов, формируемых соответственно по информации блоков ММА и ММГ. В результате в полученных значениях углов крена и дифферента, практически полностью устраняются, прежде всего, погрешности ММА, возникающие вследствие действия на качке переносных ускорений, а также погрешности, обусловленные нестабильностью смещений нулей ММГ.
Полученные результаты компьютерного моделирования подтверждают возможность работы электронного кренодифферентометра с погрешностями выработки углов крена и дифферента, ниже, не менее чем на 30% значений погрешностей, соответствующих требованиям п. 5.27.2 "Правил по оборудованию морских судов, части V Российского Морского Регистра Судоходства" при измерении углов крена в диапазоне ±90° и дифферента в диапазоне ±45° при воздействии переносных ускорений, действующих при установке кренодифферентометра на расстоянии не менее 10 метров от центра качания судна по оси, нормальной к палубе.
Таким образом, заявленный технический результат считается достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения центра качания судна | 2024 |
|
RU2823383C1 |
| Способ коррекции магнитного курса судна | 2024 |
|
RU2839828C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| Способ измерения магнитного курса судна с использованием системы коррекции | 2023 |
|
RU2804444C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ И УГЛОВ ОРИЕНТАЦИИ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ | 2004 |
|
RU2261417C1 |
| СПОСОБ ВЫСТАВКИ МОРСКОЙ БИНС | 2014 |
|
RU2572651C1 |
| Способ измерения магнитного курса судна в высоких широтах | 2021 |
|
RU2763685C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
Изобретение относится к навигационному приборостроению. В судовом электронном кренодифферентометре углы крена и дифферента формируются по показаниям триады микромеханических гироскопов (ММГ) и триады микромеханических акселерометров (ММА). Сформированные углы крена и дифферента преобразуются в выходные сигналы кренодифферентометра путем применения комбинации высокочастотных составляющих углов по данным ММГ и низкочастотных составляющих углов по данным ММА. Повышается точность измерения углов крена и дифферента. 1 ил.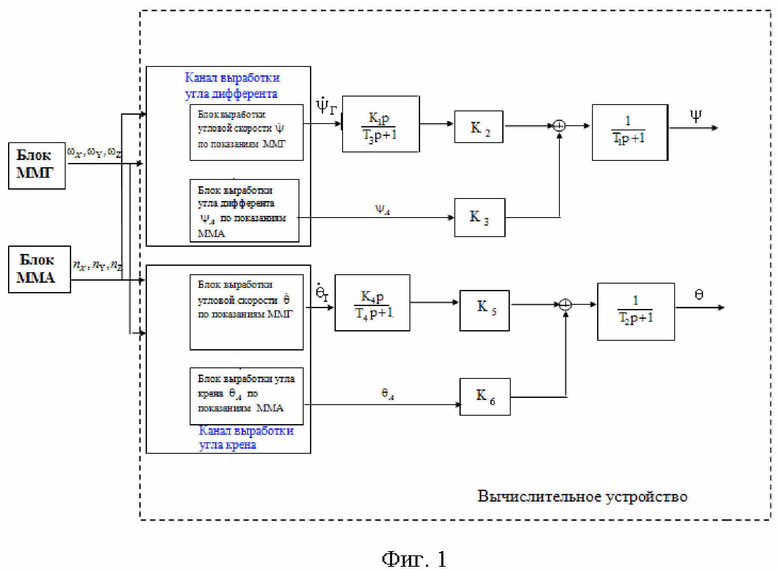
Судовой электронный кренодифферентометр на основе гироскопов и акселерометров, имеющий вычислительное устройство для выработки углов крена и дифферента, отличающийся тем, что углы крена и дифферента формируются как по показаниям триады микромеханических гироскопов (ММГ), так и по показаниям триады микромеханических акселерометров (ММА), сформированные таким образом углы крена и дифферента затем преобразуются в выходные сигналы кренодифферентометра путем применения комбинации высокочастотных составляющих углов по данным ММГ и низкочастотных составляющих углов по данным ММА.
| JP S63150622 A, 23.06.1988 | |||
| Инерциальный измерительный прибор летательного аппарата на микромеханических датчиках и способ повышения его точности | 2015 |
|
RU2615018C1 |
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ КРЕНА И ДИФФЕРЕНТА ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2486098C1 |
| Механизм для последовательного подвода заготовок к инструменту и к отводному лотку в станках для обрезки патронных гильз | 1933 |
|
SU36376A1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| US 4318300 A, 09.03.1982 | |||
| КОМПЛЕКС ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПРОСТРАНСТВЕННЫХ КОЛЕБАНИЙ ПЛАВУЧИХ ОБЪЕКТОВ В ОПЫТОВОМ (ВОЛНОВОМ) БАССЕЙНЕ | 2016 |
|
RU2652173C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ И УГЛОВ ОРИЕНТАЦИИ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ | 2004 |
|
RU2261417C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |

