Изобретение относится к устройствам для скрытной транспортировки, хранения и запуска беспилотного летательного аппарата (БПЛА) в условиях ограниченного по ширине пространства и может быть использовано для ведения разведки, поражения воздушных целей и наземных стационарных и движущихся объектов.
Беспилотные летательные аппараты самолетного типа широко применяются в различных областях науки и техники, в т.ч. для мониторинга площадных объектов народного хозяйства, транспортной инфраструктуры, лесных ресурсов, фото-, видеосъемки объектов, доставки грузов, поисково-спасательных операций и пр.
Такие летательные аппараты могут запускаться с наземных пусковых установок, что бывает осложнено погодными условиями и ветром и может занимать достаточно много времени для позиционирования аппарата в процессе подготовки к запуску.
Из уровня техники известны системы запуска беспилотных летательных аппаратов, сочетающие в себе как возможности транспортировки летательного аппарата к месту запуска, так и непосредственно запуска с шасси транспортного средства.
Известно наземное транспортное средство (патент РФ №180861, опубл. 28.06.2018), оснащенное модулем для хранения и автоматического запуска БПЛА на базе шасси специального транспортного средства, содержащее коробчатый кузов фургон с жестким каркасом, двигатель, трансмиссию, ходовую часть, системы управления и электроснабжения, модуль хранения и запуска БПЛА, защитные створки модуля, устройство открытия-закрытия защитных створок модуля, платформу для фиксации БПЛА, механизм подъема и поворота платформы, механизм подъема и поворота платформы дополнительно содержит вращательный привод.
Известное решение относится к системам транспортирования и пуска беспилотных летательных аппаратов вертикального взлета. Известное решение не предусматривает возможность запуска БПЛА самолетного типа в условиях ограниченного пространства кузова и ограниченного пространства для запуска БПЛА. Кроме того, в известном решении имеются следующие недостатки:
• отсутствие каких-либо мер по обеспечению скрытности транспортировки и подготовки к пуску БПЛА, особенно в радиодиапазоне электромагнитных волн.
• отсутствие механизма питания БПЛА и обеспечения интерфейса с БПЛА в процессе транспортировки.
• отсутствие механизма автоматического раскладывания крыла БПЛА.
• отсутствие алгоритма описания управления БПЛА после старта в ограниченном пространстве.
Известна система запуска летательных аппаратов (патент РФ №2647362, опубл. 15.03.2018), содержащая пусковое плечо, монтируемое на подвижном транспортном средстве, содержащее датчик нагрузки; летательный аппарат, подсоединенный к пусковому плечу и содержащий генератор тяги и систему управления полетом; и высвобождающий механизм в сообщении с датчиком нагрузки. Высвобождающий механизм выполнен с возможностью высвобождения летательного аппарата, если датчик нагрузки указывает на то, что нагрузка на пусковое плечо ниже заданного порогового значения.
Недостатки известного решения заключаются в следующем:
• отсутствие каких-либо мер по обеспечению скрытности транспортировки и подготовки к пуску БПЛА, особенно в радиодиапазоне электромагнитных волн.
• отсутствие механизма питания БПЛА и обеспечения интерфейса с БПЛА в процессе транспортировки.
• отсутствие механизма автоматического раскладывания крыла БПЛА
• отсутствие алгоритма описания управления БПЛА после старта в ограниченном пространстве.
• жесткая связь пускового устройства с датчиком тяги может не позволить стартовать БПЛА при использовании алгоритма включения источника тяги на максимальные или достаточно значимые величины (например, устройство не сработает при включении двигателя/генератора тяги после схода БПЛА с направляющей стрелы пусковой установки).
Известно устройство для управления беспилотными летательными аппаратами (патент US7114680B2, опубл. 03.10.2016), включающее опорные средства, имеющие продольную ось; средства запуска, установленные на опорных средствах, при этом средства запуска расположены вдоль продольной оси опорных средств для управления беспилотным летательным аппаратом во время взлета; и средства спасения для перехвата и захвата беспилотного летательного аппарата в полете с возможностью его освобождения, при этом средства спасения размещаются на средствах обеспечения. Опорные средства могут быть установлены на транспортном средстве, включая прицеп или лодку, или на неподвижной платформе, включая здание.
Недостатком известного решения является необходимость приведения пусковой установки, сложенной в отдельном жестком контейнере, в состояние пригодное к осуществлению пуска. Кроме того консоли крыла летательного аппарата полностью отстыкованы в транспортном положении от тела БПЛА. Т.е. транспортировка БПЛА осуществляется в разобранном состоянии, а применение пусковой установки для запуска требует дополнительных операций по приведению пусковой стрелы в рабочее состояние. Отсутствует конструктивное решение обеспечивающее питание и интерфейс с БПЛА в процессе транспортировки - отрывной разъем, автоматически отстыковывающийся в процессе старта. Также не описан алгоритм управления беспилотным летательным аппаратом после запуска БПЛА.
Задачей настоящего изобретения являлось создание системы скрытной транспортировки беспилотного летательного аппарата к точке пуска, обеспечивающей возможность быстрой подготовки летательного аппарата к пуску и управления БПЛА при старте в ограниченном по ширине пространстве.
Технический результат - скрытная транспортировка и быстрая скрытная подготовка беспилотного аппарата самолетного типа к запуску в условиях ограниченного пространства.
Технический результат достигается тем, что система скрытной транспортировки и пуска беспилотного летательного аппарата самолетной схемы содержит наземное транспортное средство с прицепом, в котором размещена пусковая установка и беспилотный летательный аппарат, и пункт управления автоматизированной подготовкой к пуску, пуском и полетом беспилотного летательного аппарата в кабине транспортного средства, при этом прицеп содержит тент с жестким каркасом, содержащий откидные относительно продольной оси прицепа секции, соединенные с приводом; пусковая установка содержит основание с установленным на нем с возможностью перемещения по направляющим посредством соединенной с натяжителем каретки беспилотным летательным аппаратом, крыло которого содержит центральную часть, прикрепленную к фюзеляжу беспилотного летательного аппарата и две откидных консоли, выполненные с возможностью дистанционного раскладывания и изменения угла наклона к центральной части; беспилотный летательный аппарат во время транспортировки и подготовке к пуску соединен с пунктом управления кабелем с использованием отрывного разъема, выполненным с возможностью автоматического отсоединения в момент пуска.
Система скрытной транспортировки и пуска беспилотного летательного аппарата в соответствии с настоящим изобретением включает наземное транспортное средство, выполняющее роль тягача, прицеп, в котором размещена пусковая установка, и беспилотный летательный аппарат самолетной схемы.
Прицеп транспортного средства снабжен тентом с жестким каркасом, который разделен на 2-4 части по продольной оси симметрии прицепа. Тент выполнен с возможностью дистанционно управляемого раскрытия для подготовки к запуску БПЛА.
Откидывание (раскрытие) и складывание частей тента осуществляют электромеханическим, гидравлическим или пневматическим приводом с дистанционным управлением по кабелю или с помощью радиолинии от пункта управления БАС.
Автомобиль, выполняющий роль тягача также может выполнять роль дистанционного наземного пункта управления, т.к. внутри автомобиля могут быть размещены рабочие места операторов.
Пусковая установка включает установленную на основании пусковую стрелу, снабженную направляющими и размещенную на ней с возможностью перемещения каретку, снабженную средствами удержания БПЛА и соединенной с натяжителем.
Летательный аппарат, применяемый в настоящей системе, снабжен трансформируемым крылом для упрощения его размещения внутри прицепа.
Для пояснения настоящего изобретения приведены следующие чертежи:
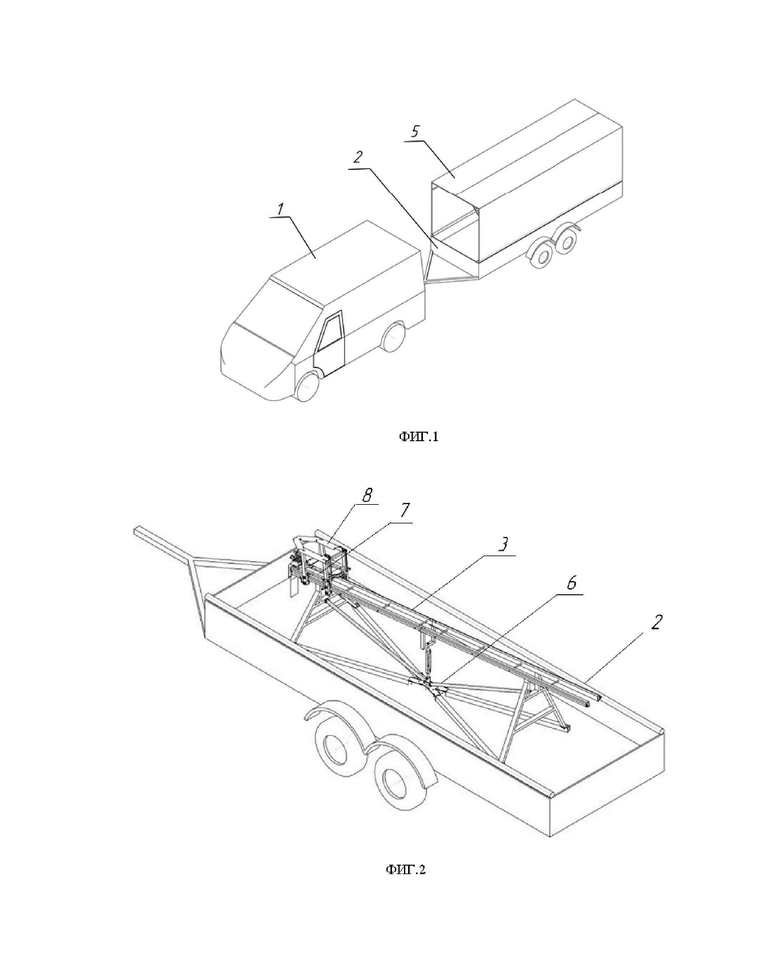
Фиг.1 - схематичный вид системы в транспортном положении;
Фиг.2 - вид прицепа с пусковой установкой (тент условно не показан);
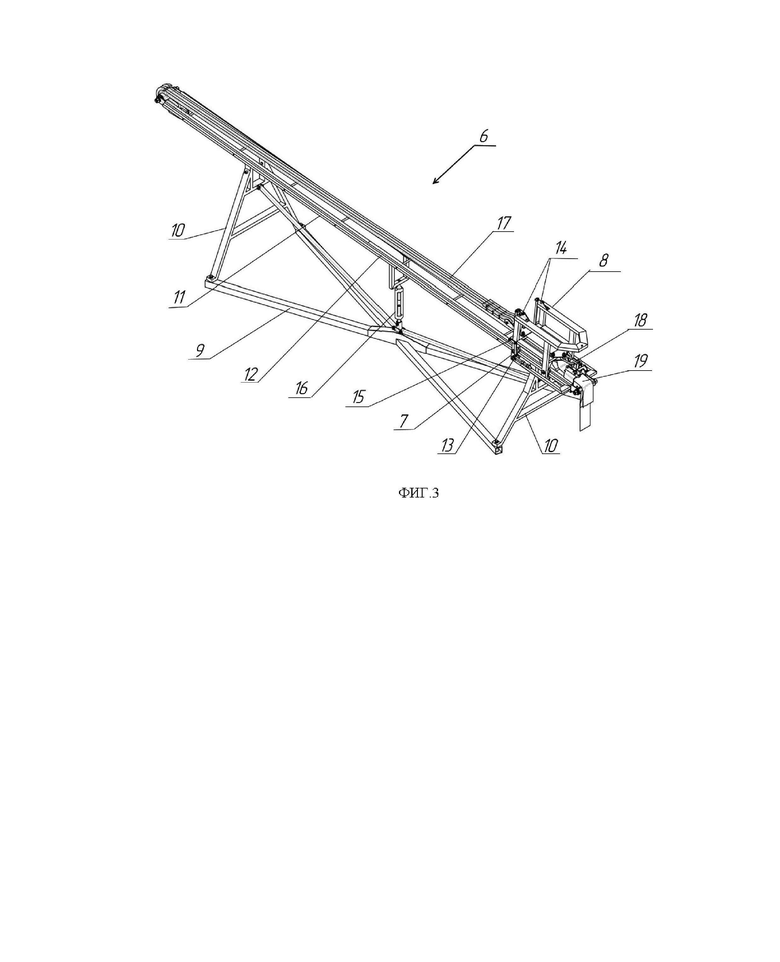
Фиг.3 - общий вид пусковой установки;
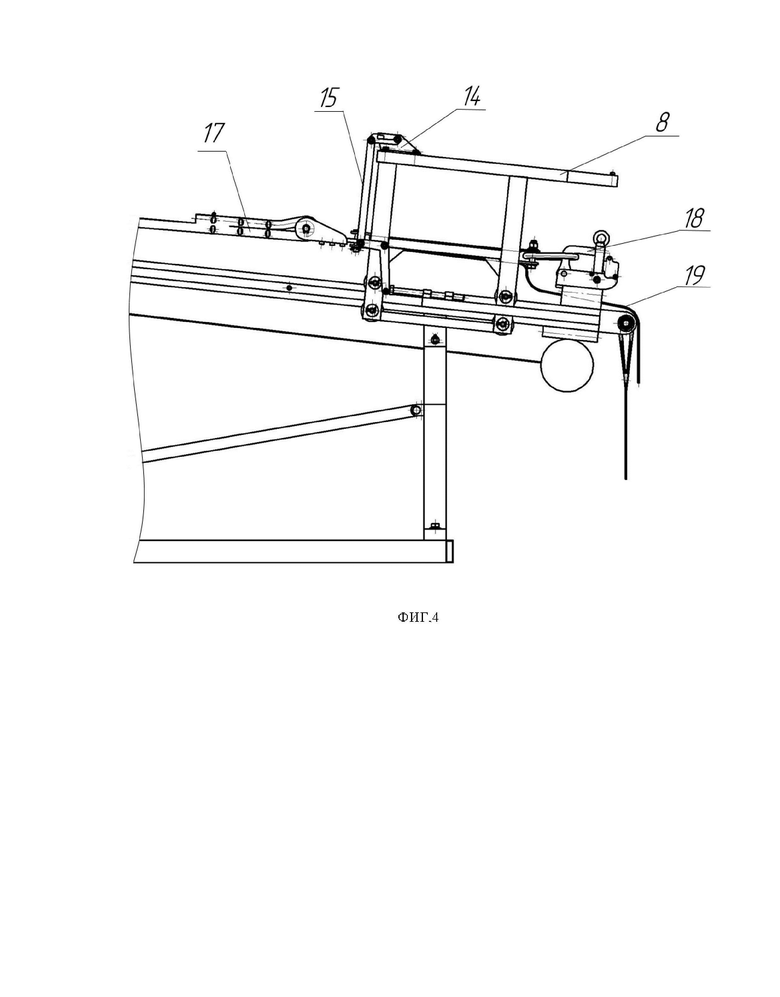
Фиг.4 - вид сбоку на каретку пусковой установки;
Фиг.5 - общий вид беспилотного летательного аппарата;
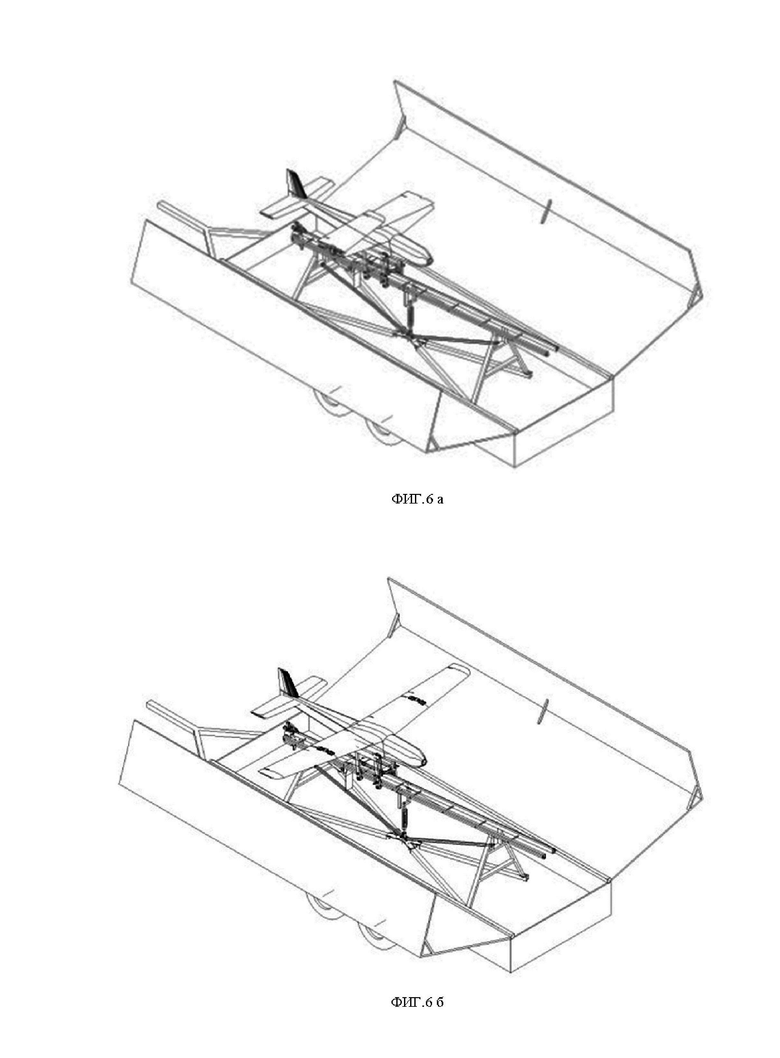
Фиг.6 а, б - иллюстрация подготовки БПЛА к запуску.
Система скрытной транспортировки и пуска беспилотного летательного аппарата включает наземное транспортное средство 1, выполняющее роль тягача, прицеп 2, в котором размещена пусковая установка 3, беспилотный летательный аппарат 4 самолетной схемы и пункт управления автоматизированной подготовкой к пуску, пуском и полетом БПЛА из кабины транспортного средства.
Прицеп 2 выполнен с тентом 5 на жестком каркасе, который содержит откидные относительно продольной оси секции. Откидывание и складывание секций тента осуществляют посредством привода с дистанционным управлением по кабелю или с помощью радиолинии от пункта управления. При этом привод (актуатор) закреплен одним концом к неподвижной части прицепа, а вторым концом закреплен на откидной секции прицепа.
В частном случае осуществления привод может быть выбран из электромеханического, гидравлического или пневматического. Актуатор может быть выполнен линейным или поворотным.
Пусковая установка 3 обеспечивает дистанционное управление накоплением энергии для пуска БПЛА (натяжной механизм с электрической лебедкой, пневмонасос и пр.).
Пусковая установка 3 содержит закрепленное на шасси прицепа основание 6, выполненное в виде пространственной металлической разборной конструкции, на котором посредством каретки 7 закреплено с возможностью перемещения устройство 8 удержания БПЛА. Пусковая установка в различных вариантах реализации может быть закреплена в прицепе жестко или через амортизаторы. Ось пусковой установки совмещена с продольной осью прицепа.
Основание 6 содержит горизонтальную часть 9, в частном случае реализации выполненную в виде металлических профильных труб, опорные стойки 10 и закрепленную на них пусковую стрелу 11. Опорные стойки выполнены разной высоты и обеспечивают установку пусковой стрелы поду углом к горизонту таким образом, чтобы обеспечить необходимый угол атаки БПЛА.
Пусковая стрела 10 выполнена рамной конструкции и содержит направляющие с пазами 12, в которых подвижно установлены ролики 13 каретки 7. Устройство 8 удержания БПЛА выполнено в виде корпуса коробчатой формы с верхней площадкой для установки на ней фюзеляжа БПЛА с закрепленными на ней с двух сторон от БПЛА упорами 14, соединенными посредством пружины с системой рычагов 15. Упоры 14 предназначены для фиксации/расфиксации БПЛА в устройстве удержания 8. Для дополнительного повышения жесткости рамы пусковой стрелы по всей ее длине может быть использован регулировочный резьбовой кронштейн 16, соединенный с горизонтальной части 9 основания 6.
Система рычагов 15 устройства может быть приведена в движение как вручную, так и электромеханическим устройством, управляемым дистанционно с пункта управления.
Каретка 7 с одной стороны соединена с натяжителем 17, обеспечивающим накопление энергии для пуска БПЛА. В частном случае реализации в качестве натяжителя 17 используют резиноамортизаторный шнур, соединенный с электромеханической лебедкой, или пневматический энергоаккумулятор пружинно-поршневого типа, соединенный с пневмонасосом. С другой стороны каретка 7 соединена с замком 18, удерживающим ее перед стартом. Дополнительно каретка 7 соединена со стропой 19, выполненной, например, в виде резинотканевой ленты, и служащей для ограничения перемещения каретки 7 при ее движении по направляющей и обеспечения возврата каретки 7 в исходное положение. Перемещение каретки 7 в обратном направлении посредством стропы 19 может быть осуществлено вручную или электромеханическим устройством, управляемым дистанционно с пункта управления.
Беспилотный летательный аппарат 4 имеет складное крыло 20, обеспечивающее возможность в сложенном состоянии размещения на каретке пусковой установки внутри закрытого тентом прицепа. Для этого крыло имеет центральную часть 20, прикрепленную к фюзеляжу 21 БПЛА и две откидных консоли 22, которые могут складываться и раскладываться с помощью электромеханического привода по дистанционно подаваемой команде с пульта управления. Складывание осуществляется плавно, а установка угла складывания определяется дистанционно по команде или программно на заранее запрограммированные углы. Управление складыванием крыла также может применяться в полете БПЛА для прямого управления величиной подъемной силы крыла и аэродинамическим качеством БПЛА. Компенсация изменения моментов при складывании крыла обеспечивается автоматическим управлением изменением угла установки стабилизатора 23посредством дополнительного привода и среднего положения руля высоты или аэродинамических поверхностей, выполняющих роль руля высоты.
БПЛА соединен с пунктом управления кабелем с использованием отрывного разъема, который автоматически отстыковывается от БПЛА в момент пуска. Такая конструкция обеспечивает зарядку аккумуляторных батарей, прогрев аппаратуры БПЛА и обеспечение работы с БПЛА без выхода в эфир радиосредств БПЛА во время транспортировки.
В качестве отрывного разъема, например, может быть использован разъем с магнитным держателем или с использованием подпружиненных контактов. При этом одна часть разъема крепится на хвостовой части БПЛА, а вторая часть на кабеле, протянутом от пункта управления.
Например, в случае использования разъема с магнитным держателем усилия магнитного держателя достаточно для удержания разъема соединенным при транспортировке, однако недостаточно для удержания соединения при пуске БПЛА при движении его вперед на каретке пусковой установки, на который воздействует сила, превышающая десятки килограмм. В случае использования разъема с подпружиненными контактами, ответная часть разъема прижимается к подпружиненным контактам, что препятствует расстыковке при транспортировке, однако беспрепятственно расстыковывается при прикладывании большого усилия в процессе старта.
Параметры автоматизированных приводов подбирают такими, чтобы от остановки транспортного средства до пуска БПЛА проходило минимальное количество времени, исчисляемое секундами и минутами (не более 5-10 минут).
Дополнительно система может включать датчики для обеспечения автоматического управления пуском БПЛА, например, лазерным дальномером, установленным на пусковой установке и обеспечивающим правильного позиционирование пусковой установки, или иными датчиками, воспрещающими или обращающими внимание оператора на возможные препятствия на пути БПЛА при взлете.
Описание работы устройства
Беспилотный летательный аппарат 4 самолетного типа устанавливается на каретку 7 пусковой установки 3 и фиксируется на каретке 7 с помощью упоров 14 и системы рычагов 15. В транспортном положении и перед пуском каретка 7 зафиксирована в крайнем заднем положении замком 18. Натяжитель 17 при транспортировке ослаблен до свободного состояния.
В процессе транспортировки система выглядит как обычный автомобиль с прицепом, содержимое которого укрыто стандартным тентом.
При прибытии на место пуска, которым может быть автодорога с прямым участком с посаженными по обочинам лесополосами или просека в лесу - ограниченным по ширине пространством, оператор подает дистанционные управляющие сигналы на приводы, обеспечивающие открытие тента, и приводы, обеспечивающие раскладывание крыла. Время данной подготовки системы к пуску занимает не более двух минут.
Освобождают каретку 7 от зацепления с замком 18 вручную или путем подачи сигнала на удерживающий скобу замка 18 элемент, после чего подают управляющий сигнал на электромеханическую лебедку или пневмонасос для натяжения натяжителя 17. Одновременно с этим осуществляется освобождение БПЛА от удерживающих его упоров 14 путем воздействия на них через систему рычагов 15. Каретка 7 под действием силы натянутого резиноамортизаторного шнура начинает двигаться вперед (по направлению полета БПЛА), при этом система рычагов 15 при помощи пружины освобождает БПЛА от препятствия к движению вперед.
Отрывной разъем при старте БПЛА расстыковывается автоматически, после чего информация от БПЛА на пункт управления поступает через радиотехнические средства (возможно, через некоторое запрограммированное время).
Для обеспечения пуска БПЛА в ограниченном по ширине пространстве, например дороге с лесополосами по бокам, просеке в лесу или старта в городских условиях с проезжей части дороги, применяют специальный алгоритм автоматического управления БПЛА. Он заключается в следующем:
1. На начальном этапе старта при прохождении БПЛА по пусковой установке автоматически запоминается в системе автоматического управления БПЛА курсовой угол движения БпЛА по вектору путевой скорости БПЛА, получаемой от приемника глобальной навигационной спутниковой системы и/или бортового компаса.
2. После схода с пусковой установки управление БПЛА осуществляется таким образом, чтобы следовать по линии заданного пути, которая является воображаемым продолжением линии, совпадающей с курсовым углом пусковой установки и движения БПЛА на начальном этапе, с минимальным отклонением. При наличии бокового ветра или иных возмущений, влияющих на полет БПЛА, алгоритм управления БПЛА автоматически отклоняет курс БПЛА для компенсации бокового сноса для сохранения полета по линии заданного пути. На этом этапе полета БПЛА устанавливается максимально возможная скороподъемность БПЛА, определяемая его тактико-техническими характеристиками.
3. БПЛА с наибольшей скороподъемностью, соблюдая полет по линии заданного пути, достигает заранее заданной высоты, гарантированно превышающей высоту деревьев (из боковых лесополос), леса (при старте из просеки) или зданий и сооружений, а также деталей рельефа местности), после чего включается алгоритм следования по маршруту, который уже не требует следования начальной линии заданного пути при старте с пусковой установки (возможно гибкое адаптивное изменение начальной заданной высоты превышения возможных препятствий с помощью разного рода датчиков, например лидара, ориентированного вбок БПЛА).
Скрытность обеспечивается отсутствием визуальных отличий системы от обычного автомобиля с прицепом. Соединение пункта управления с БПЛА кабелем с отрывным разъемом обеспечивает скрытность в радиодиапазоне электромагнитных волн в процессе подготовки к пуску и в процессе пуска.
Ускорение процесса подготовки пуска БПЛА достигается за счет:
• отсутствия необходимости выгрузки, сборки и приведения в рабочее состояние пусковой установки,
• отсутствия необходимости сборки БПЛА и установки его на пусковую установку, только после чего проводится прогрев и предстартовая подготовка БПЛА,
• автоматизированного приведения пусковой установки в состояние готовности к запуску БПЛА,
• простоты и высокой скорости разворота прицепа с установленной на нем пусковой установкой для обеспечения готовности к пуску БПЛА в направлении старта против ветра или коррекции направления пуска БПЛА в кратчайшее время,
• параллельного процесса предстартовой подготовки, раскрытия тента прицепа, раскрытия крыла БПЛА, приведения в состояние готовности к пуску пусковой установки.

Изобретение относится к устройствам для скрытной транспортировки, хранения и запуска беспилотного летательного аппарата (БПЛА). Система содержит наземное транспортное средство с прицепом, в котором размещена пусковая установка и беспилотный летательный аппарат, и пункт управления автоматизированной подготовкой к пуску, пуском и полетом беспилотного летательного аппарата в кабине транспортного средства. Прицеп содержит тент с жестким каркасом, содержащий откидные относительно продольной оси прицепа секции. Пусковая установка содержит основание с установленным на нем с возможностью перемещения по направляющим БПЛА посредством соединенной с натяжителем каретки. Крыло БПЛА содержит центральную часть, прикрепленную к фюзеляжу БПЛА, и две откидных консоли, выполненные с возможностью дистанционного раскладывания и изменения угла наклона к центральной части. БПЛА во время транспортировки и подготовки к пуску соединен с пунктом управления кабелем с использованием отрывного разъема, выполненным с возможностью автоматического отсоединения в момент пуска. Достигается возможность скрытной транспортировки и быстрой скрытной подготовки беспилотного аппарата самолетного типа к запуску в условиях ограниченного пространства. 4 з.п. ф-лы, 6 ил.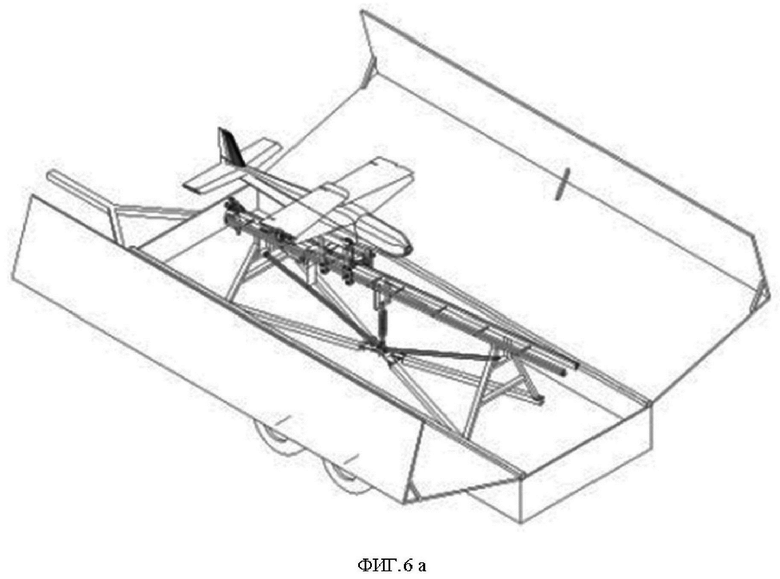
1. Система скрытной транспортировки и пуска беспилотного летательного аппарата самолетной схемы, содержащая наземное транспортное средство с прицепом, в котором размещена пусковая установка и беспилотный летательный аппарат, и пункт управления автоматизированной подготовкой к пуску, пуском и полетом беспилотного летательного аппарата в кабине транспортного средства, отличающаяся тем, что прицеп содержит тент с жестким каркасом, содержащий откидные относительно продольной оси прицепа секции, соединенные с приводом, пусковая установка содержит основание с установленным на нем с возможностью перемещения по направляющим посредством соединенной с натяжителем каретки беспилотным летательным аппаратом, крыло которого содержит центральную часть, прикрепленную к фюзеляжу беспилотного летательного аппарата, и две откидных консоли, выполненные с возможностью дистанционного раскладывания и изменения угла наклона к центральной части, при этом беспилотный летательный аппарат во время транспортировки и подготовки к пуску соединен с пунктом управления кабелем с использованием отрывного разъема, выполненным с возможностью автоматического отсоединения в момент пуска.
2. Система по п.1, отличающаяся тем, что привод секций тента выбран из электромеханического, гидравлического или пневматического.
3. Система по п.1, отличающаяся тем, что беспилотный летательный аппарат установлен на основании с использованием устройства удержания, содержащего упоры, соединённые посредством пружин с системой рычагов, выполненных с возможностью перемещения для расфиксации беспилотного летательного аппарата.
4. Система по п.1, отличающаяся тем, что в качестве натяжителя используют резиноамортизаторный шнур, соединенный с электромеханической лебедкой, или пневматический энергоаккумулятор пружинно-поршневого типа, соединенный с пневмонасосом.
5. Система по п.1, отличающаяся тем, что каретка для ограничения перемещения каретки при ее движении по направляющей и обеспечения возврата каретки в исходное положение соединена со стропой.
| CN 207956095 U, 12.10.2018 | |||
| US 5695153 A1, 09.12.1997 | |||
| US 2022234755 A1, 28.07.2022 | |||
| CN 108202876 A, 26.06.2018 | |||
| US 20190047726 A1, 14.02.2019 | |||
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |

