Изобретение относится к способам навигации автономных подводных аппаратов (ПА), конкретно к гидроакустическим способам определения местонахождения ПА с использованием подводных акустических маяков (АМ).
Известен ряд гидроакустических способов обсервации ПА с использованием АМ [1-10]. Все эти способы объединяет наличие одного или несколько активных АМ с известными координатами, излучающих либо переизлучающих гидроакустические сигналы. Эти АМ могут располагаться на дне (донные маяки-ответчики – ДМО), на дрейфующих буях, оборудованных приёмниками сигналов глобальной навигационной спутниковой системы, на надводных судах. Достоинством этих способов является простота и высокая точность обсервации ПА, а недостатком – высокая стоимость реализации этих способов вследствие высокой стоимости активных АМ, а также ограниченный срок действия, что обусловлено в случае автономных АМ (ДМО и буёв) ограниченным ресурсом их аккумуляторных батарей (АБ).
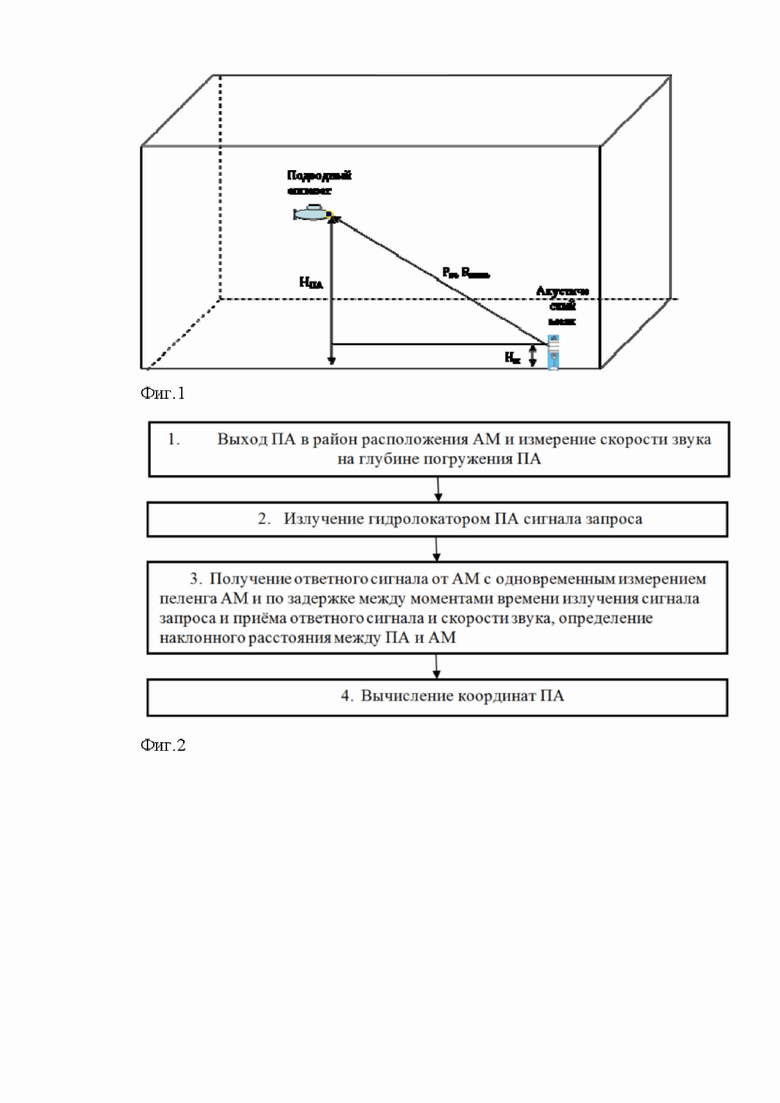
В качестве прототипа выберем способ обсервации ПА, описанный в [1, с.174]. Существо способа-прототипа поясняется на фиг.1, блок схема способа приведена на фиг.2. В некоторой точке моря с известными координатами  устанавливается активный АМ в виде ДМО. ПА, придя в район расположения АМ, начинает излучать сигналы запроса. При получении ответного сигнала от АМ, закодированного известным кодом, ПА измеряет пеленг
устанавливается активный АМ в виде ДМО. ПА, придя в район расположения АМ, начинает излучать сигналы запроса. При получении ответного сигнала от АМ, закодированного известным кодом, ПА измеряет пеленг  на АМ и по разности времён излучения сигнала запроса и получения ответного сигнала (за вычетом известной фиксированной задержки между временем приёма АМ сигнала запроса и временем излучения ответного сигнала), умноженной на делённую пополам скорость звука
на АМ и по разности времён излучения сигнала запроса и получения ответного сигнала (за вычетом известной фиксированной задержки между временем приёма АМ сигнала запроса и временем излучения ответного сигнала), умноженной на делённую пополам скорость звука  , определяет наклонное расстояние
, определяет наклонное расстояние  до АМ. С использованием измеренных
до АМ. С использованием измеренных  и
и  и известных отстояний от дна АМ
и известных отстояний от дна АМ  и ПА
и ПА  , а также известных координат АМ в некоторой местной декартовой системе координат, в которой ось Y совпадает с направлением на север, а ось X – на восток, вычисляются координаты ПА
, а также известных координат АМ в некоторой местной декартовой системе координат, в которой ось Y совпадает с направлением на север, а ось X – на восток, вычисляются координаты ПА  в той же системе координат по формулам:
в той же системе координат по формулам:
Недостатками способа-прототипа являются:
- высокая стоимость АМ (вследствие наличия гидроакустического приёмо-излучателя);
- ограниченное время функционирования АМ (вследствие ограниченной ёмкости АБ);
- ограниченная надёжность АМ (вследствие наличия большого числа радиоэлементов).
Решаемая техническая проблема – повышение качества обсервации ПА.
Технический результат – уменьшение стоимости, увеличение времени и надежности функционирования АМ.
Указанный технический результат достигается тем, что вместо активного АМ, излучающего гидроакустические сигналы, используется пассивный АМ. По аналогии с надводными ориентирами [1] назовём его подводным пассивным ориентиром, сокращённо ППО.
Сущность предлагаемого изобретения заключается в том, что в отличие от способа-прототипа в качестве акустического маяка применяют пассивный подводный ориентир в виде звукоотражающего тела в форме уголкового отражателя, установленного при помощи плавучести, якоря и якорь-троса на расстоянии 5-10 м от дна моря, распознавание которого по данным активного гидролокатора осуществляют по его неподвижности, по известному отстоянию звукоотражающего тела от дна, по его известным геометрическим размерам, по известной величине силы цели на частоте излучения, при этом сближение с акустическим маяком осуществляют до расстояния, на котором расчётная круговая среднеквадратическая ошибка определения координат подводного аппарата будет меньше заданного значения.
ППО должен удовлетворять следующим требованиям:
- координаты ППО должны быть известны с высокой точностью;
- ППО должен надежно обнаруживаться и распознаваться по данным гидролокатора ПА.
Выполнение первого требования трудностей не вызывает: координаты ППО фиксируются при его установке при помощи глобальной навигационной спутниковой системы или каким-либо другим способом.
Трудности вызывает второе требование, поскольку обнаружение и распознавание пассивного ППО необходимо осуществлять активным гидролокатором ПА на фоне многочисленных донных объектов естественного (камни, неровности дна) и искусственного (мусор, оставленный кораблями, следы кораблекрушений) происхождения. Т.е. пассивный ППО, мало того, что должен быть заметен на фоне отражений зондирующих сигналов (ЗС) от дна, он должен иметь отличительные признаки от других донных объектов.
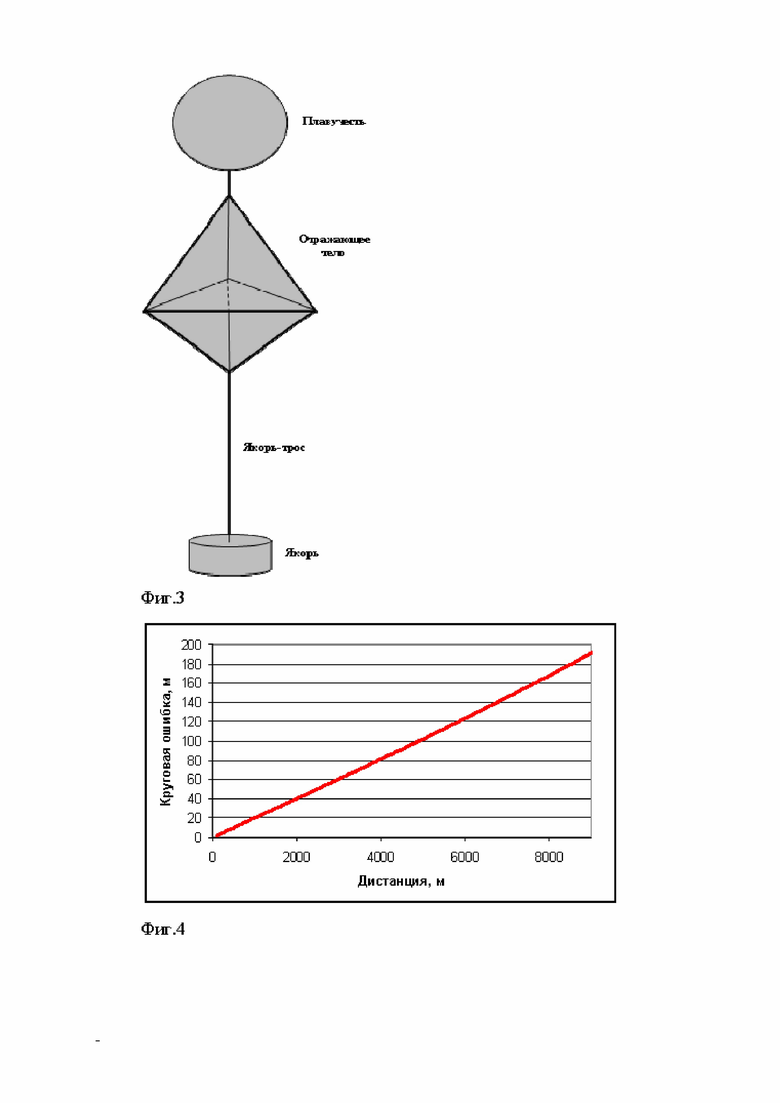
После рассмотрения различных вариантов для достижения технического результата в изобретении предлагается конструкция ППО в виде звукоотражающего тела в форме уголкового отражателя [11], оснащенного якорем с якорь-тросом длиной 5-10 м и положительной плавучестью, поддерживающей отражающее тело на расстоянии от дна, равном длине якорь-троса (фиг.3).
Оценим дистанцию обнаружения ППО типовым гидролокатором ПА с параметрами:
- частота излучения  =15 кГц;
=15 кГц;
- полоса частот излучаемого зондирующего сигнала  =3 кГц;
=3 кГц;
- длительность излучаемого сигнала  =100 мс;
=100 мс;
- давление зондирующего сигнала на оси характеристики направленности излучающей антенны  =174 дБ//20 мкПа;
=174 дБ//20 мкПа;
- размеры приёмной антенны (ширина×высота) 2×0,5 м, что обеспечивает коэффициент концентрации на частоте излучения  =30 дБ [14];
=30 дБ [14];
- сектора обзора: ±1300 в горизонтальной плоскости и ±300 в вертикальной плоскости;
- пороговое индикаторное отношение сигнал/помеха (ОСП) для обнаружения эхосигнала  =32 (15 дБ);
=32 (15 дБ);
- среднеквадратическая ошибка измерения дистанции до обнаруженной цели при однократном зондировании составляет не более 2% от текущей дистанции и в основном определяется ошибкой знания скорости звука [11]:
 ,
, 
где  – текущая дистанция до ППО (цели);
– текущая дистанция до ППО (цели);

- неучтённые технические потери  =6 дБ;
=6 дБ;
- приведённый уровень шумов моря при волнении 3 балла 33 дБ//20 мкПа (соответственно давление помех на входе антенны на частоте и в полосе излучения  =44,2 дБ//20 мкПа).
=44,2 дБ//20 мкПа).
- ошибки измерения пеленга обнаруженной цели:
- приборная ошибка  =0,10;
=0,10;
- флюктуационная среднеквадратическая ошибка при однократном зондировании [14]:
 ,
,
где
 – ширина приёмной антенны;
– ширина приёмной антенны;
 – скорость звука в воде;
– скорость звука в воде;
 – дистанция обнаружения цели.
– дистанция обнаружения цели.
Из формулы (3) следует, что при приведенных параметрах гидролокатора на дистанции обнаружения (т.е. при пороговом ОСП)  =0,40. При приближении к цели ошибка уменьшается пропорционально уменьшению дистанции;
=0,40. При приближении к цели ошибка уменьшается пропорционально уменьшению дистанции;
- среднеквадратическая ошибка измерения угла места обнаруженной цели при однократном зондировании [14]:
 ,
,
где  – высота приёмной антенны.
– высота приёмной антенны.
Из формулы (4) следует, что при приведенных параметрах гидролокатора на дистанции обнаружения (т.е. при пороговом ОСП)  =1,60. При приближении к цели ошибка уменьшается пропорционально уменьшению дистанции.
=1,60. При приближении к цели ошибка уменьшается пропорционально уменьшению дистанции.
В качестве отражающего тела ППО рассмотрим треугольный уголковый отражатель со стороной треугольника  1 м, имеющий силу цели [11]:
1 м, имеющий силу цели [11]:
 ,
,
где
 – сила цели;
– сила цели;
 – сторона треугольного отражателя.
– сторона треугольного отражателя.
Характеристики гидроакустических условий:
- цилиндрический закон распространения акустического сигнала с переходным расстоянием 1 км;
- коэффициент пространственного затухания на частоте излучения  =2,1 дБ/км.
=2,1 дБ/км.
Дальность обнаружения ППО определяется как решение относительно  уравнения [11]:
уравнения [11]:

где
 – аномалия распространения сигнала, при цилиндрическом законе распространения акустического сигнала, вычисляемая по формуле:
– аномалия распространения сигнала, при цилиндрическом законе распространения акустического сигнала, вычисляемая по формуле:
где
 - переходное расстояние, примерно равное глубине моря в районе.
- переходное расстояние, примерно равное глубине моря в районе.
Из решения уравнения (6) получено, что дистанция обнаружения ППО составляет 9,1 км.
Распознавание ППО описанной конструкции в активном режиме работы гидролокатора ПА осуществляется по следующим признакам:
- по его неподвижности (что отличает ППО от подвижных морских объектов);
- по известному отстоянию ППО от дна (что отличает его от донных объектов);
- по его известным геометрическим размерам (что отличает ППО от крупногабаритных донных объектов);
- по известной величине силы цели на частоте излучения.
Определение координат ПА с использованием ППО описанной конструкции осуществляется следующим образом.
При движении ПА по заданному маршруту система управления (СУ) ПА извлекает из памяти вычислителя характеристики следующего по маршруту движения ППО, а именно: географические координаты, геометрические размеры, величина отстояния отражающего тела от дна, коэффициент отражения (сила цели) и расчетная дальность обнаружения ППО гидролокатором ПА  . СУ периодически рассчитывает текущее расстояние до ППО. Как только расчётное расстояние до ППО, увеличенное на возможную ошибку счисления пути, станет равным расчётной дальности обнаружения ППО , СУ выдаёт команду погрузиться на максимально возможную глубину (не меньшую, чем глубина расположения отражающего тела ППО), включить гидролокатор и начать поиск ППО.
. СУ периодически рассчитывает текущее расстояние до ППО. Как только расчётное расстояние до ППО, увеличенное на возможную ошибку счисления пути, станет равным расчётной дальности обнаружения ППО , СУ выдаёт команду погрузиться на максимально возможную глубину (не меньшую, чем глубина расположения отражающего тела ППО), включить гидролокатор и начать поиск ППО.
При обнаружении на фоне донной реверберации локального отражающего объекта в гидролокаторе начинается его классификация.
Алгоритм классификации имеет следующий вид.
С момента обнаружения объекта в процессе приближения к нему на каждом цикле локации измеряются следующие характеристики (классификационные признаки) объекта:
- скорость объекта  , измеряемая одним из двух способов: по доплеровскому смещению частоты эхосигнала (ЭС) при излучении тонального зондирующего сигнала или сигнала в виде последовательности Костаса, либо по результатам траекторного анализа объекта;
, измеряемая одним из двух способов: по доплеровскому смещению частоты эхосигнала (ЭС) при излучении тонального зондирующего сигнала или сигнала в виде последовательности Костаса, либо по результатам траекторного анализа объекта;
- коэффициент отражения (сила цели) объекта  , дБ, который рассчитывается по формуле [12]
, дБ, который рассчитывается по формуле [12]

где
 - давление эхосигнала в его полосе частот, измеренное на выходе приёмного тракта и приведённое ко входу приёмной антенны;
- давление эхосигнала в его полосе частот, измеренное на выходе приёмного тракта и приведённое ко входу приёмной антенны;
 - измеренное гидролокатором наклонное расстояние до объекта, м;
- измеренное гидролокатором наклонное расстояние до объекта, м;
- горизонтальная геометрическая протяженность объекта  , определяемая по формуле
, определяемая по формуле

где
 - количество характеристик направленности (ХН) антенны в горизонтальной плоскости, в которых наблюдается эхосигнал;
- количество характеристик направленности (ХН) антенны в горизонтальной плоскости, в которых наблюдается эхосигнал;
 - ширина ХН антенны в горизонтальной плоскости, рад;
- ширина ХН антенны в горизонтальной плоскости, рад;
- отстояние обнаруженного объекта от дна  , которое рассчитывается по формуле
, которое рассчитывается по формуле

где  - измеренная эхолотом глубина под килём ПА, м;
- измеренная эхолотом глубина под килём ПА, м;
 - измеренный гидролокатором угол в вертикальной плоскости прихода эхосигнала (с плюсом – выше горизонта, с минусом – ниже).
- измеренный гидролокатором угол в вертикальной плоскости прихода эхосигнала (с плюсом – выше горизонта, с минусом – ниже).
Решение о том, что обнаруженный объект является ППО, принимается на основе вычисленных вероятностей непринадлежности объекта возможным альтернативным подлёдным классам объектов с использованием оценок перечисленных классификационных признаков (КП).
В табл.1 приведены средние значения КП для ППО и 4-х альтернативных классов подводных объектов, а также предельные ошибки их измерения.
Таблица 1 – Средние значения классификационных признаков
подводных объектов и предельные ошибки их измерения
(кл. 1), уз
КП-1 м/с, дБ
м/с, дБ
КП-3
 , м
, м
КП-2 , м
, м , м
, м
КП-4 м
м
На каждом цикле измерения КП вычисляются апостериорные вероятности непринадлежности обнаруженного объекта каждому из 4-х альтернативных классов с использованием каждого из 4-х КП. Вычисление осуществляется по формуле [16]:
где
 – апостериорная вероятность непринадлежности ППО
– апостериорная вероятность непринадлежности ППО  -му альтернативному классу по
-му альтернативному классу по  -му КП;
-му КП;
 – значение функции правдоподобия принадлежности объекта -му классу по
– значение функции правдоподобия принадлежности объекта -му классу по  -му КП (класс =0 соответствует ППО), вычисляемое по формуле:
-му КП (класс =0 соответствует ППО), вычисляемое по формуле:
 – результат измерения (оценка) -го КП;
– результат измерения (оценка) -го КП;
 – среднее значение -го КП для -го класса;
– среднее значение -го КП для -го класса;
 – предельная ошибка измерения -го КП.
– предельная ошибка измерения -го КП.
Решение о принадлежности обнаруженного объекта классу ППО принимается, если для каждого -го альтернативного класса хотя бы по одному -му КП вероятность непринадлежности этому классу ППО превышает заданный порог  (например, =0,9). Если же, хотя бы для одного альтернативного класса хотя бы по одному -му КП вероятность непринадлежности этому классу ППО меньше величины 1-, принимается решение, что обнаруженный объект не ППО. Если на текущем цикле локации окончательное решение не принято, продолжается сближение с обнаруженным объектом до тех пор, пока одно из решений не будет принято.
(например, =0,9). Если же, хотя бы для одного альтернативного класса хотя бы по одному -му КП вероятность непринадлежности этому классу ППО меньше величины 1-, принимается решение, что обнаруженный объект не ППО. Если на текущем цикле локации окончательное решение не принято, продолжается сближение с обнаруженным объектом до тех пор, пока одно из решений не будет принято.
Рассмотрим, как описанный алгоритм будет работать в динамике. Допустим, что обнаруженным объектом фактически является ППО.
Вскоре после обнаружения объекта можно будет принять решение о его подвижности/неподвижности. Если допустить крайний случай, cостоящий в том, что скорость неподвижного ППО была измерена с предельной ошибкой и составила  =0,6 м/с, то расчёт по формуле (11) покажет, что вероятность того, что цель не является подвижной равна 0,92. Т.е. классы 3 и 4 (ПЛ и ПА) в дальнейшем можно не рассматривать.
=0,6 м/с, то расчёт по формуле (11) покажет, что вероятность того, что цель не является подвижной равна 0,92. Т.е. классы 3 и 4 (ПЛ и ПА) в дальнейшем можно не рассматривать.
Вторым КП, который является информативным, начиная с дистанции обнаружения, является сила цели, вычисляемая по формуле (8) с использованием измеренных давления эхосигнала на входе антенны и дистанции до объекта. Из табл.1 следует, что сила цели ППО в случае применения уголкового отражателя существенно превышает силу цели объектов классов 1 и 2 (подвижные объекты рассматривать не будем, поскольку они исключаются по скорости). Отражения от складок грунта практически идентичны донной реверберации. Коэффициент отражения от камней существенно меньше коэффициента отражения от уголкового отражателя. Поэтому даже с учётом достаточно большой ошибки измерения, по данному признаку в большинстве случае удаётся исключить классы 1 и 2 уже на дистанциях, близких к дистанции обнаружения.
Если по двум признакам принято решение, что обнаруженный объект не принадлежит ни к одному из 4-х альтернативных классов, принимается решение, что обнаруженный объект является ППО. В противном случае продолжается сближение с обнаруженным объектом для выполнения классификации по всем 4-м КП одновременно.
На дистанции обнаружения 9 км минимальная оценка горизонтальной протяжённости объекта  при ширине приёмной антенны 2 м составляет 400 м. Если ширина обнаруженного объекта превышает эту величину, то эхосигнал будет наблюдаться в нескольких пространственных каналах и вероятность того, что обнаруженный объект является не протяжённым, рассчитываемая по формуле (11), будет превышать порог 0,9, что даст возможность исключить из дальнейшего рассмотрения протяжённые цели. Если же эхосигнал наблюдается в одном пространственном канале, оценка его горизонтальной протяжённости, полученная на дистанции 9 км, составляет от 0 м до 400 м и вынести решение о том, что объект не протяженный, на дистанции 9 км не представляется возможным. В процессе приближения к обнаруженному объекту, если этот объект имеет протяженность более 100 м, то начиная с дистанции 2,25 км, эхосигнал от него будет наблюдаться в нескольких пространственных каналах. В нашем же случае обнаружения ППО эхосигнал на всех дистанциях будет наблюдаться в одном канале, однако уже на дистанции 2,25 км можно будет принять решение, что объект не является протяжённым и тем самым исключить из рассмотрения класс объектов 1. Данный КП, используемый совместно с силой цели, позволяет повысить надёжность исключения из рассмотрения протяженные цели.
при ширине приёмной антенны 2 м составляет 400 м. Если ширина обнаруженного объекта превышает эту величину, то эхосигнал будет наблюдаться в нескольких пространственных каналах и вероятность того, что обнаруженный объект является не протяжённым, рассчитываемая по формуле (11), будет превышать порог 0,9, что даст возможность исключить из дальнейшего рассмотрения протяжённые цели. Если же эхосигнал наблюдается в одном пространственном канале, оценка его горизонтальной протяжённости, полученная на дистанции 9 км, составляет от 0 м до 400 м и вынести решение о том, что объект не протяженный, на дистанции 9 км не представляется возможным. В процессе приближения к обнаруженному объекту, если этот объект имеет протяженность более 100 м, то начиная с дистанции 2,25 км, эхосигнал от него будет наблюдаться в нескольких пространственных каналах. В нашем же случае обнаружения ППО эхосигнал на всех дистанциях будет наблюдаться в одном канале, однако уже на дистанции 2,25 км можно будет принять решение, что объект не является протяжённым и тем самым исключить из рассмотрения класс объектов 1. Данный КП, используемый совместно с силой цели, позволяет повысить надёжность исключения из рассмотрения протяженные цели.
Оценка отстояния обнаруженного объекта от дна информативна, когда глубина, на которой движется ПА, превышает глубину отражающего тела ППО. В частности, если отражающее тело ППО отстоит от дна на 10 м, а у ПА под килём 5 м, то при предельной ошибке измерения угла прихода эхосигнала в вертикальной плоскости 30, начиная с расстояния 400 м эхосигнал от ППО будет наблюдаться в отрыве от донной реверберации и соответственно оценка отстояния обнаруженного объекта от дна будет больше нуля.
Если обнаруженный объект фактически является ПА или ПЛ, то он будет правильно классифицирован с использованием оценки скорости на дистанции, близкой к дистанции обнаружения. Если обнаружен протяженный объект, то он надёжно будет распознан по силе цели и, если потребуется, то и по горизонтальной протяжённости. Малоразмерные донные объекты будут классифицированы по силе цели и отстоянию от дна.
Следует особо заметить, что классификация по всем КП повторяется по результатам каждого цикла локации, следующих с периодом порядка 15 с. Вычисленные вероятности накапливаются, что позволяет уменьшить флюктуации оценок классификационных признаков.
Если принято решение, что обнаруженный объект является искомым ППО, вычисляются координаты ПА по формуле
где

 - оценка наклонной дистанции до ППО;
- оценка наклонной дистанции до ППО;


Оценим ошибки определения координат ПА с использованием формулы (13).
Дисперсии оценок координат ПА могут быть определены по формулам [15]:
где



Учитывая независимость и малость ошибок оценки дистанции и углов, относительные дисперсии переменных  могут быть определены по формулам [15]:
могут быть определены по формулам [15]:
Подставляя (16) в (14), получим:
Учитывая, малость угла 
Тогда (17) примет вид

Дисперсия круговой ошибки оценки координат ПА составит

Подставляя в (20) дисперсии оценок пеленга (1) и дистанции (3), будем иметь
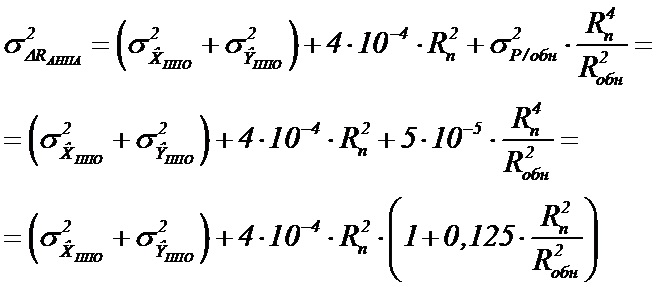
Из анализа формулы (21) следует, что дисперсия круговой ошибки координат ПА равна сумме дисперсии ошибки позиционирования ППО (первая скобка в формуле (21)) и дисперсии, обусловленной ошибками измерения пеленга и дистанции ППО (второй член в формуле (21)). Причём вторая дисперсия зависит от дистанции до ППО: с уменьшением дистанции дисперсия монотонно уменьшается.
Для оценки вклада ошибок измерения пеленга и дистанции в ошибку оценки координат ПА на фиг.4 приведён график зависимости величины 2-го члена в формуле (21) от дистанции до ППО.
Из рассмотрения фиг.4 следует, что на дистанции обнаружения ППО 9 км вклад ошибок измерения гидролокатором пеленга и дистанции ППО в среднеквадратическую круговую ошибку определения координат ПА составляет 192 м. При сближении с ППО этот вклад монотонно уменьшается вплоть до величины 2 м на дистанции 100 м. Эта ошибка является предельно малой, поскольку при дальнейшем сближении ППО попадает в мёртвую зону гидролокатора.
Таким образом, для обеспечения высокоточного позиционирования ПА с использованием ППО необходимо:
- максимально точно позиционировать ППО при его установке;
- сближаться с ППО на дистанцию, при которой расчётная ошибка позиционирования ПА, обусловленная ошибками измерения пеленга и дистанции ППО, будет меньше ошибки позиционирования ППО.
Достоинствами предлагаемого способа обсервации ПА являются
- высокая точность обсервации;
- неограниченное время функционирования ППО;
- высокая надёжность ППО;
- относительно низкая стоимость ППО.
Реализуемость и эффективность заявляемого способа подтверждены путём разработки и испытаний в гидроакустическом бассейне макета отражающего тела ППО, а также математическим моделированием.
Испытания макета отражающего тела в виде уголкового отражателя со стороной 1 м показали, что его сила цели на типовых частотах работы гидролокаторов ПА составляет 13-15 дБ, что позволяет обнаруживать его гидролокатором ПА на дальностях до 7-9 км.
Таким образом, заявленный технический результат – уменьшение стоимости, увеличение времени и надежности функционирования ППО – можно считать достигнутым.
Источники информации:
1. Справочник штурмана под ред. В.Д.Шандабылова. // М.: Воениздат, 1968, 540 с.
2. Kinsey J.C., Eustice R.M., Whitcomb L.L. A Survey of Underwater Vehicle Navigation: Recent Advances and new Challenges // IFAC Conference on maneuvering and control of marine craft. 2006. Lisbon, Portugal.
3. Малеев П.И. Проблемы средств навигации ПА и возможные пути их решения // Навигация и гидрография. 2015. № 39. С.7-11.
4. Кебкал К.Г., Машошин А.И. Гидроакустические методы позиционирования автономных необитаемых подводных аппаратов // Гироскопия и навигация. 2016. Т. 24, №3 (94). С.115-130.
5. Дубровин Ф.С., Щербатюк А.Ф. Исследование некоторых алгоритмов одномаяковой мобильной навигации ПА: результаты моделирования и морских испытаний // Гироскопия и навигация. 2015. № 4. С. 160-170.
6. Милн П.Х. Гидроакустические системы позиционирования. // Л.: Судостроение, 1989.
7. Патент РФ №24693462 439 613с.- Способ позиционирования подводных объектов.
8. Патент США №2003078706. Methods and systems for navigating under water.
9. Патент Японии №2005269378. Marine information providing buoy for underwater, marine information communication system using the same and data management center for marine information communication.
10. Патент КНР №100495066. Underwater GPS positioning navigation method and system without high stable frequency scale.
11. Урик Р. Дж. Основы гидроакустики. // Л.: Судостроение, 1978.
12. Абчук В.А., Суздаль В.Г. Поиск объектов. // М.: Сов. радио, 1977. 336 с.
13. Смарышев М.Д., Добровольский Ю.Ю. Гидроакустические антенны. // Л.: Судостроение, 1984.
14. Бреннан Д. Точность измерения угловых координат радиолокатором с антенной в виде фазированной решетки // Зарубежная радиоэлектроника. 1962. №1. С.27–34.
15. Вентцель Е.С., Овчаров Л.А. Теория вероятностей и ее инженерные приложения. // М.: Наука, 1988.
16. Кендал М., Стьюарт А. Статистические выводы и связи. // М.: Наука, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ позиционирования подводных аппаратов при плавании по постоянному маршруту | 2022 |
|
RU2785215C1 |
| Способ позиционирования подводных аппаратов | 2019 |
|
RU2717161C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| Способ определения координат и параметров движения подводных объектов при мультистатической гидролокации | 2024 |
|
RU2830066C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 1995 |
|
RU2084923C1 |
Использование: изобретение относится к способам навигации автономных подводных аппаратов (ПА), конкретно к гидроакустическим способам определения местонахождения ПА с использованием подводных акустических маяков. Сущность: вместо активного акустического маяка, излучающего гидроакустические сигналы, применяют пассивный подводный ориентир в виде звукоотражающего тела в форме уголкового отражателя, установленного при помощи плавучести, якоря и якорь-троса на расстоянии 5-10 м от дна моря, распознавание которого по данным активного гидролокатора осуществляют по его неподвижности, по известному отстоянию звукоотражающего тела от дна, по его известным геометрическим размерам, по известной величине силы цели на частоте излучения, при этом сближение с акустическим маяком осуществляют до расстояния, на котором расчётная круговая среднеквадратическая ошибка определения координат подводного аппарата будет меньше заданного значения. Технический результат: уменьшение стоимости, увеличение времени и надежности функционирования акустического маяка. 4 ил.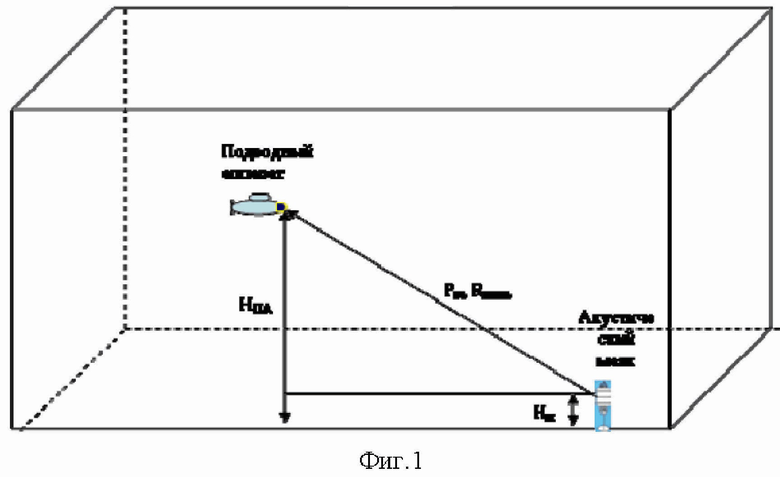
Способ обсервации подводного аппарата, оснащенного средствами автономной подводной навигации и активным гидролокатором, включающий обнаружение подводного акустического маяка с известными координатами, измерение его пеленга и наклонной дистанции, определение координат подводного аппарата, отличающийся тем, что в качестве акустического маяка применяют пассивный подводный ориентир в виде звукоотражающего тела в форме уголкового отражателя, установленного при помощи плавучести, якоря и якорь-троса на расстоянии 5-10 м от дна моря, распознавание которого по данным активного гидролокатора осуществляют по его неподвижности, по известному отстоянию звукоотражающего тела от дна, по его известным геометрическим размерам, по известной величине силы цели на частоте излучения, при этом сближение с акустическим маяком осуществляют до расстояния, на котором расчётная круговая среднеквадратическая ошибка определения координат подводного аппарата будет меньше заданного значения.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| Способ позиционирования подводных аппаратов | 2019 |
|
RU2717161C1 |
| WO 2001065274 A1, 07.09.2001 | |||
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2468388C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |

