Изобретение относится к области гидроакустики в части методов обнаружения сигнала синхронизации, формируемого на основе псевдослучайных последовательностей максимальной длины (М-последовательностей).
Способ разработан для повышения помехоустойчивости системы обнаружения гидроакустического сигнала за счет использования корреляционных свойств сигнала синхронизации.
Известны технические решения, обеспечивающие обнаружение гидроакустического сигнала на фоне аддитивной помехи [Смагулов А.Б., Бутырский Е.Ю., Шаталов Г.В., Якунин К.В. Патент РФ №2549207 от 03.06.2013. Устройство обнаружения шумовых гидроакустических сигналов на основе квадратурного приемника. МПК G01S 15/04]. Обнаружение гидроакустического сигнала производится за счет применения квадратурного детектирования в банке узкополосных частотных каналов.
Другим вариантом решения задачи обнаружения синхросигнала является метод на основе вычисления взаимной корреляции принятого сигнала с циклическими сдвигами опорного сигнала [Бобровский И.В., Литвиненко С.Л. Патент РФ №2688201 от 25.12.2017. Способ обнаружения сигнала в многолучевом канале с постоянным уровнем ложных тревог. СПК Н04В 11/00, Н04В 7/015]. Данный способ обеспечивает постоянный уровень ложных тревог в многолучевом канале за счет накопления результатов вычисления корреляционной функции реализаций принятого сигнала с временным сдвигом и циклически сдвинутым опорным сигналом.
В работе [Голубев А.Н. Патент РФ №2571872 от 01.10.2014. Способ передачи информации в цифровой системе связи с шумоподобными сигналами. МПК H04L 27/18] представлен пример системы связи со сложными шумоподобными сигналами, формирование которых осуществляется на основе двоичных псевдослучайных последовательностей (ПСП) Хаффмана, имеющих максимальную длину (далее - М-последовательности) [Хаффман Д.А. Синтез линейных многотактных кодирующих схем /Д.А. Хаффман/ Теория передачи сообщений. - М.: ИЛ, 1957. - С. 52-81]. При реализации данной системы в излучающем устройстве для генерации М-последовательностей используется «-разрядный регистр сдвига с линейной обратной связью [Алексеев А.И, Шереметьев А.Г., Тузов Г.И., Глазов Б.И. Теория и применения псевдослучайных сигналов. М.: Наука, 1969. 368 с.], в разряды регистра записывается передаваемое сообщение n-разрядным двоичным числом, от которого зависит циклический сдвиг М-последовательности относительно исходного состояния. Излучаемая М-последовательность известна в приемном устройстве, что позволяет сформировать опорный сигнал. При превышении порога взаимной корреляции принятого сигнала с опорным принимается решение о наличии сигнала на входе.
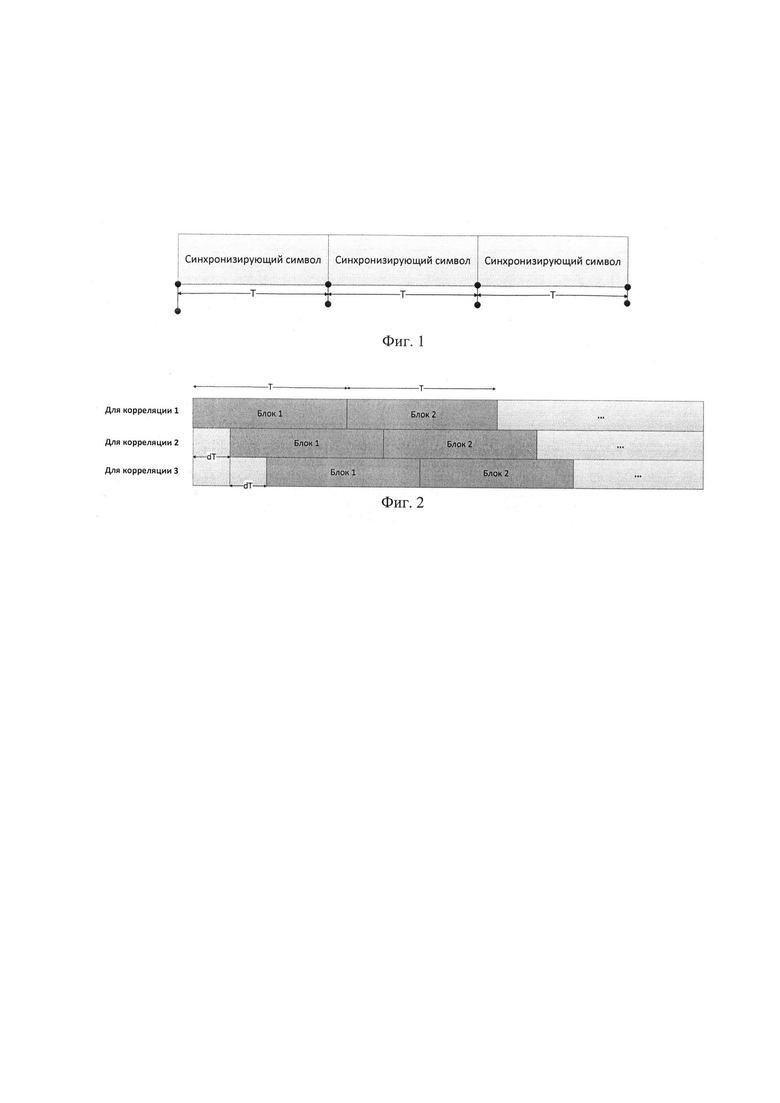
Наиболее близким по функциональным и техническим характеристикам выступает способ обнаружения сигнала синхронизации в работе [Кранц В.З., Сечин В.В. Обнаружение синхросигнала в системе гидроакустической связи // Сб. труд. 2 Научно-практической конференции «Гидроакустическая связь и гидроакустические средства аварийно-спасательного назначения». Волгоград, 16-19.07. - 2003. С. 64]. Описанный способ обнаружения синхросигнала гидроакустической связи на основе М-последовательностей был выбран в качестве прототипа. Структура сигнала синхронизации представлена на фиг. 1.
Способ использует двухэтапное обнаружение синхросигнала. Первый этап включает в себя процедуру взаимной корреляции двух последовательных фрагментов принятого сигнала. В случае обнаружения сигнала по результатам первого этапа, используется второй этап обработки, который включает в себя процедуру взаимной корреляции принятого фрагмента сигнала с опорным сигналом.
На первом этапе обработки сигнала грубо оценивается доплеровское смещение частоты сигнала, что позволяет отказаться на втором этапе от большого числа корреляторов, настроенных на свои доплеровские смещения частоты. Вместо этого используется банк корреляторов меньшего размера со значениями доплеровского смещения частоты вблизи полученной грубой оценки.
Способ, рассмотренный в прототипе, может быть доработан в части улучшения помехоустойчивости обнаружения сигнала на первом этапе обработки. Для накопления результатов обработки сигнала и улучшения помехоустойчивости системы в прототипе предлагается использовать результаты обработки фрагментов сигнала, взятых со сдвигом Т. Таким образом, объем выборки для принятия решения об обнаружении равен количеству синхронизирующих символов минус единица.
Предложенный способ позволяет кратно увеличить объем выборки для построения трассы обнаружения за счет уменьшения сдвига между фрагментами принятого сигнала, используемыми для вычисления корреляции, что позволяет обеспечить фиксированную вероятность правильного обнаружения при меньшем отношении сигнал/помеха на входе системы обработки.
В предложенном способе трассовый анализ представляет собой оценку корреляционной функции нескольких пар последовательных фрагментов сигнала длительности Т, начала которых взяты со сдвигом. Пример выбора фрагментов сигнала длиной T для первых трех корреляций со сдвигом dT приведен на фиг. 2.
Значения сдвига dT определяются интервалом корреляции τкорр шумовых составляющих, где τкорр<dT<T, например dT=T/10.
Таким образом, может быть получен набор из М корреляционных функций для последовательных пар фрагментов принятого сигнала. Полученный набор корреляционных функций может быть представлен в виде матрицы, имеющей размерность М на Nмод, где М - количество корреляционных функций, взятых на рассмотрение, Nмод зависит от предельных значений доплеровского смещения и определяется диапазоном возможных скоростей абонентов. Таким образом, значение Nмoд эквивалентно числу доплеровских каналов. Каждый столбец матрицы соответствует своему доплеровскому смещению частоты.
Дальнейший анализ матрицы состоит в получении флагов превышения порогов корреляции по следующему алгоритму:
1. Сравнить каждое значение матрицы корреляций с порогом;
2. Сформировать новую матрицу флагов, аналогичной размерности с матрицей корреляций;
3. Заполнить матрицу флагов по следующему правилу:
- для значений, превышающих порог, флаги установить в единицу;
- для значений ниже порога, флаги установить в ноль.
Полученная матрица флагов используется для проведения трассового анализа. Количество превышений порога в каждом доплеровском канале можно получить, проведя суммирование по столбцам матрицы флагов. Результатом является вектор значений, каждое из которых соответствует количеству превышений порога в доплеровском канале. Длина вектора количества превышений порога равна количеству доплеровских каналов.
Элементы вектора количества превышений сравниваются с порогом обнаружения, который выражается в количестве превышений порога уровня корреляции в одном доплеровском канале.
Таким образом, аналогично прототипу, в обнаружении сигнала используются два пороговых уровня:
- порог уровня корреляции (для построения трассы);
- порог количества превышений уровня корреляции (для принятия решения по трассе).
Решение об обнаружении принимается, если в любом из доплеровских каналов количество превышений порога уровня корреляции превышает количества превышений.
При выбранном значении dT=Т/10 максимальное количество превышений порога равно 30, а выбор порогового значения определяется входным отношением сигнал/помеха.
Предлагаемый способ обнаружения может быть использован в системах гидроакустической связи, чувствительных ко времени синхронизации, например системах управления подводными аппаратами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Абонентский приемник в составе гидроакустической системы позиционирования большой дальности для глубокого моря | 2022 |
|
RU2789636C1 |
| УСТРОЙСТВО ДЛЯ ДЕКОДИРОВАНИЯ ДИСКРЕТНЫХ СИГНАЛОВ, РАСПРОСТРАНЯЮЩИХСЯ В МНОГОЛУЧЕВОМ КАНАЛЕ | 2013 |
|
RU2541199C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| Способ адаптивного обнаружения морского шумящего объекта | 2023 |
|
RU2809016C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА В МНОГОЛУЧЕВОМ КАНАЛЕ С ПОСТОЯННЫМ УРОВНЕМ ЛОЖНЫХ ТРЕВОГ | 2017 |
|
RU2688201C1 |
| СПОСОБ ПОИСКА ШИРОКОПОЛОСНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2159508C1 |
| УСТРОЙСТВО ДЛЯ ДЕКОДИРОВАНИЯ ДИСКРЕТНЫХ СИГНАЛОВ, РАСПРОСТРАНЯЮЩИХСЯ В МНОГОЛУЧЕВОМ КАНАЛЕ | 2014 |
|
RU2560102C2 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКИХ ШУМОПОДОБНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2014 |
|
RU2552534C1 |
| Способ передачи информации по гидроакустическому каналу на дальние дистанции | 2024 |
|
RU2825432C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
Изобретение относится к области гидроакустики и может быть использовано в гидроакустических комплексах связи при реализации процедуры обнаружения сигнала синхронизации, формируемого на основе псевдослучайных последовательностей максимальной длины - М-последовательностей. Техническим результатом изобретения является обеспечение фиксированной вероятности правильного обнаружения при меньшем отношении сигнал/помеха на входе системы обработки. В способе обнаружения сигнала синхронизации гидроакустический связи решение об обнаружении принимается на основе трассового анализа корреляционных функций. Для принятия решения об обнаружении взаимная корреляция вычисляется для нескольких пар фрагментов сигнала, начала которых сдвигаются относительно предыдущей пары на dT отчетов. Значения сдвига dT определяются интервалом корреляции τкорр шумовых составляющих, где τкорр<dT<T, где Т - номинальная длина одного синхронизирующего символа. Полученный набор корреляционных функций сдвинутых фрагментов сигнала используется для построения трассы обнаружения. Для этого отсчеты корреляционных функций сравниваются с порогом, номер отсчета корреляционной функции выступает аналогом доплеровского канала. Количество превышений порога в каждом доплеровском канале получается суммированием превышений для всех корреляций. Результатом является вектор значений, каждое из которых соответствует количеству превышений порога в доплеровском канале. Элементы вектора количества превышений сравниваются с порогом обнаружения, который выражается в количестве превышений порога уровня корреляции в одном доплеровском канале. При превышении порога количества превышений уровня принимается решение об обнаружении. 2 ил.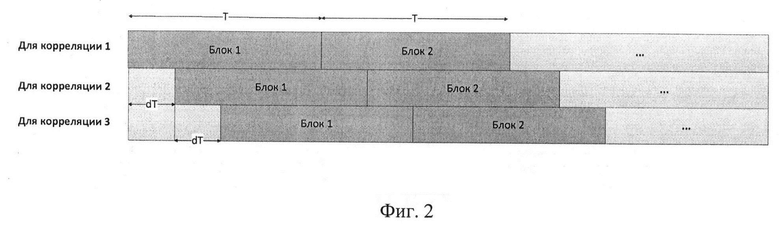
Способ обнаружения сигнала синхронизации гидроакустической связи, состоящего из трех или более последовательно переданных идентичных символов, содержащий процедуры аналого-цифрового преобразования сигнала, буферизации отсчетов, вычисления взаимной корреляции двух примыкающих фрагментов принятого сигнала, при этом длина фрагмента равна Т - номинальной длине одного синхронизирующего символа, вычисления среднего значения шумовых отсчетов, нормирования полученных значений корреляционной функции на среднее значение шумовых отсчетов, поиска максимального значения нормированной корреляционной функции, последовательного повторения процесса вычисления для нескольких фрагментов принятого сигнала, формирования трассы обнаружений, представляющей собой массив двоичных значений, фиксирующих превышения порога уровня корреляции, принятия решения об обнаружении на основе анализа длины трассы обнаружения сигнала, отличающийся тем, что при переходе к каждому следующему фрагменту принятого сигнала его начало сдвигается относительно начала предыдущего фрагмента на интервал равный или больший, чем ширина автокорреляционного пика синхронизирующего символа, и значительно меньший, чем длина синхронизирующего символа Т.
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ В ЦИФРОВОЙ СИСТЕМЕ СВЯЗИ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 2014 |
|
RU2571872C1 |
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКИХ ШУМОПОДОБНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2014 |
|
RU2552534C1 |
| СПОСОБ ПОЛУЧЕНИЯ МЕЛКИХ ЧАСТИЦ ПОЛИАМИДА И МЕЛКИЕ ЧАСТИЦЫ ПОЛИАМИДА | 2018 |
|
RU2771710C2 |
| CN 110535537 A, 03.12.2019 | |||
| Захватное устройство | 1987 |
|
SU1426786A1 |

