Изобретение относится к области гидроакустики и предназначено для обнаружения морского шумящего объекта с помощью дискретной протяженной антенны.
Известны способы, осуществляющие обнаружение морского шумящего объекта с помощью дискретной антенны [Антипов В.А., Величкин С.М., Подгайский Ю.П. Патент РФ №2339050 от 20.11.2008. Способ обнаружения шумящих в море объектов. МПК G01S 3/80, G01S 15/04] или [Антипов В.А., Величкин С.М., Обчинец О.Г. и другие Патент РФ №2353946 от 27.04.2009. Способ получения информации о шумящих в море объектах. МПК G01S 3/80]. Основой этих способов является адаптация к приему плоской звуковой волны, приходящей на апертуру антенны с фиксированного направления. Для этого в способах формируют совокупность характеристик направленности в двух плоскостях: в горизонтальной и вертикальной плоскости. Для формирования каждой характеристики направленности используется процедура сдвига во времени сигналов, принятых на отдельные элементы дискретной антенны, с последующим поэлементным суммированием сдвинутых сигналов. Для сдвига сигналов используются задержки по времени, теоретически рассчитанные для гипотезы о направлении прихода фронта волны. Это позволяет синфазно собрать сигнал в случае, если фронт прихода его волны является плоским (линейным в каждой из двух плоскостей), что при дальнейшей обработке увеличивает мощность принятого сигнала.
Однако если в горизонтальной плоскости предположение о линейном фронте волны выполняется в дальнем поле антенны [Бальян Р.Х., Батаногов Э.В., Богородский А.В. Терминологический словарь - справочник по гидроакустике // Л.: Судостроение. - 1989], то в вертикальной плоскости это предположение не выполняется.
Причиной искривления фронта волны в вертикальной плоскости является зависимость скорости распространения звука от глубины. В рамках лучевой теории это явление описывается как рефракция звуковых лучей, в результате которой шумовой сигнал объекта распространяется не прямолинейно, а сложным образом: искривляясь и претерпевая многочисленные внутренние отражения от слоев среды или границ (поверхности и дна) океанического волновода [Евтютов А.П., Колесников А.Е., Корепин Е.А. Справочник по гидроакустике // Л.: Судостроение. - 1988. С. 81. Гл. 3 Гидроакустические характеристики океана]. Тогда на апертуру антенны в вертикальной плоскости приходит волна, кривизна фронта которой неизвестна и далека от линейной. Следовательно, использование теоретических задержек, адаптированных к линейному фронту волны, не позволяет получить синфазные копии сигнала на совокупности элементов антенны, что может даже ухудшить результирующую мощность сигнала. В этом заключается недостаток всех способов обнаружения морского шумящего объекта, которые осуществляют формирование характеристик направленности при гипотезе о плоском фронте волны.
Наиболее близким аналогом по выполняемым процедурам к предлагаемому изобретению является способ адаптивного обнаружения морского шумящего объекта, описанный в книге [Евтютов А.П., Колесников А.Е., Корепин Е.А. Справочник по гидроакустике // Л.: Судостроение. - 1988. С. 6, Гл. 1 Гидроакустические средства], который принят за прототип.
В способе-прототипе выполняются следующие операции:
принимают N шумовых сигналов объекта на совокупность N элементов антенны,
формируют суммарный сигнал антенны, осуществляя сдвиг сигнала каждого из N элементов антенны на свою задержку по времени, соответствующую теоретическому времени прихода сигнала плоского фронта волны на каждый элемент антенны, и поэлементное сложение сдвинутых сигналов,
получают мощность сигнала, последовательно осуществляя детектирование суммарного сигнала, полосовую фильтрацию и интегрирование,
сравнивают мощность сигнала с порогом,
при превышении порога считают, что шумящий в море объект обнаружен.
Указанный способ теоретически обладает универсальностью, так как позволяет обнаруживать шумящий в море объект с помощью дискретной антенны любой конфигурации, апертура которой обладает протяженностью в той плоскости, в которой предполагается формирование характеристики направленности. Однако практически задержки по времени, которые используются в способе для сдвига сигналов, рассчитываются однократно на основании геометрических соотношений, связывающих предполагаемый угол прихода линейного фронта волны, конфигурацию поверхности антенны и фиксированную скорость звука. Использование таких задержек в условиях криволинейного фронта волны не позволяет получить синфазные копии сигнала на совокупности элементов антенны, что отрицательно влияет на результирующую мощность сигнала, и является его недостатком.
Задачей заявляемого способа является увеличение мощности принятого сигнала.
Для решения поставленной задачи в способ адаптивного обнаружения морского шумящего объекта, в котором принимают первую и последующие выборки N шумовых сигналов объекта на совокупность N элементов антенны, формируют суммарный сигнал антенны, осуществляя сдвиг сигнала каждого из N элементов антенны на свою задержку по времени и поэлементное сложение сдвинутых сигналов, получают мощность сигнала, последовательно осуществляя детектирование суммарного сигнала, полосовую фильтрацию и интегрирование, сравнивают мощность сигнала с порогом, при превышении порога считают, что шумящий в море объект обнаружен,
введены новые признаки, а именно:
выбирают один из N элементов антенны в качестве опорного,
находят совокупность из N взаимно-корреляционных функций сигнала между сигналом каждого элемента антенны и сигналом опорного элемента,
находят максимальное значение в каждой из N взаимно-корреляционных функций,
формируют текущую матрицу задержек по времени как матрицу N значений аргументов максимальных значений взаимно-корреляционных функций, и обновляют матрицу задержек после каждого следующего приема выборки сигналов,
а для формирования суммарного сигнала антенны используют задержки по времени из текущей матрицы задержек.
Технический результат изобретения заключается в оперативном измерении и учете кривизны фронта волны, приходящего на апертуру антенны, для синфазного сложения сигналов отдельных элементов. Это позволяет увеличить результирующую мощность принятого сигнала, а, следовательно, улучшить показатели эффективности обнаружения шумящего в море объекта.
Покажем возможность достижения указанного технического результата предложенным способом.
В гидроакустической технике для увеличения мощности принятого сигнала используют совокупность одиночных элементов-приемников, из которых формируют антенную решетку [Евтютов А.П., Колесников А.Е., Корепин Е.А. Справочник по гидроакустике // Л.: Судостроение. - 1988. С. 222-224]. Тогда поэлементное сложение сигналов с отдельных элементов антенны позволит при дальнейшей обработке увеличить результирующую мощность. Однако, при этом необходимо осуществлять сложение сигналов вдоль фронта волны, то есть синфазно, что подразумевает нулевую разность фаз для совокупности тональных сигналов или нулевую задержку по времени между шумовыми сигналами отдельных элементов. При неизвестном криволинейном фронте волны для того, чтобы обеспечить нулевую задержку по времени между сигналами, принятыми на отдельные приемники, необходимо сначала измерить задержки на всех элементах антенны относительного некоторого опорного элемента, а затем осуществить сдвиг всех сигналов на значения соответствующих измеренных задержек.
Для измерения задержек на всех элементах антенны в способе предлагается использовать анализ взаимно-корреляционных функций сигнала. Известно [Тихонов В.И. Статистическая радиотехника. М: Сов // Радио. - 1966. Т. 680], что для решения некоторых радиотехнических задач применяются многоканальные системы. При воздействии на вход такой системы флуктуационного шума от одного и того же источника выходные напряжения соседних каналов будут коррелированы, если частотные характеристики этих каналов перекрываются. Для оценки параметров корреляции используют взаимно-корреляционную функцию между выходными напряжениями соседних каналов.
Указанное свойство сохранения корреляции между сигналами от одного источника распространяющимися по разным путям применимо и в рассматриваемом случае. В море находится объект, который излучает шумовой сигнал. Этот сигнал распространятся в водной среде к разным элементам протяженной антенны по разным путям, однако условия распространения сигнала одинаковы, частотная передаточная характеристика среды общая для всех путей распространения. Следовательно, время хода сигнала от объекта к разным элементам антенны различно, но корреляция между сигналами, принимаемыми разными элементами антеннами сохраняется. Выявить различие во временах хода сигнала при сохранении корреляции позволяет именно анализ взаимно-корреляционной функции, что и предложено в предлагаемом способе. Максимальное значение взаимно-корреляционной функции достигается в той точке по шкале времени (шкале задержек), в которой сигнал, принятый на очередной элемент антенны, совпадает (коррелирует) с сигналом, принятым на опорный элемент. То есть искомая задержка по времени между этими сигналами может быть определена как аргумент максимального значения взаимно-корреляционной функции. Матрица таких задержек для совокупности всех элементов антенны представляет собой актуальный текущий фронт прихода волны, а использование матрицы задержек для сдвига сигналов позволит получить синфазные копии сигналов для всех элементов антенны. Это позволит увеличить результирующую мощность сигнала и, следовательно, улучшить показатели эффективности обнаружения.
Повторяющиеся процедуры способа, которые позволяют формировать матрицу задержек не однократно, а с темпом получения очередной выборки сигнала, обеспечат адаптацию способа к возможному изменению фронта волны в процессе работы. Это важно, поскольку изменение фронта волны происходит как при перемещении антенны по глубине, так и при перемещении координат объекта по расстоянию и (или) глубине погружения, что показано в работе [Консон А.Д., Лободин И.Е., Волкова А.А. Условия применимости методов пространственной локализации источника в подводном звуковом канале // Гидроакустика. - 2022. - Вып. 51 (3). - С. 12-24]
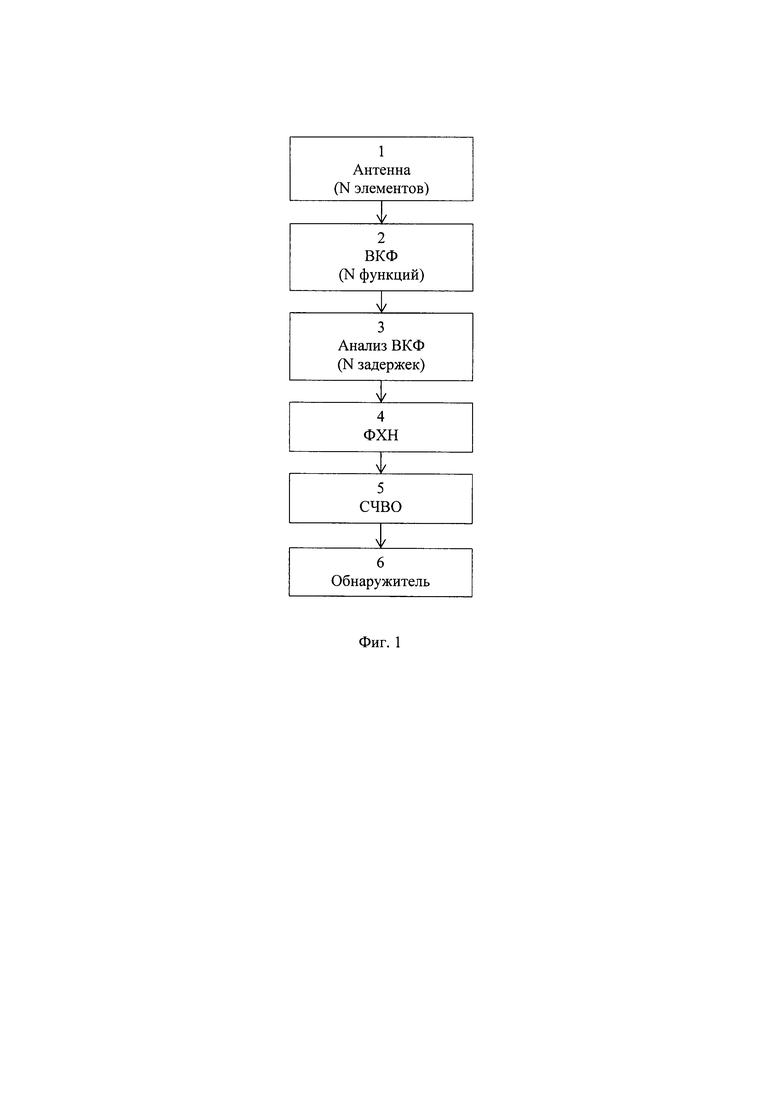
Сущность изобретения поясняется фигурой 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ.
На фиг. 1 последовательно соединены Антенна 1, блок 2 вычисления взаимно-корреляционных функций сигнала (ВКФ), блок 3 Анализа ВКФ, блок 4 формирования характеристика направленности (ФХН), система 5 частотно-временной обработки (СЧВО), Обнаружитель 6.
Для реализации способа Антенна 1 должна состоять из совокупности N электроакустических преобразователей (элементов), распределенных по ее апертуре, например [Баскин В.В., Гришман Г.Д., Жуков В.Б. и др. Патент РФ №2259643 от 27.08.2005. Гидроакустическая многоэлементная антенна выпуклой формы. МПК H04R 1/40, H04R 1/44, G01S 7/32]. До начала работы выбирают один из N элементов антенны в качестве опорного. В качестве опорного элемента может быть выбран любой из элементов антенны исходя из удобства дальнейшей обработки.
В процессе работы способа на каждый элемент антенны одновременно принимают первую и последующие выборки шумового процесса Sn(t), которые поступают с блок 2 (ВКФ). В блоке 2 осуществляется вычисление совокупности из N взаимно-корреляционных функций сигнала между сигналом каждого элемента антенны и сигналом опорного элемента. Для вычисления взаимно-корреляционных функций Wn(t) используются стандартные процедуры, которые можно осуществлять либо в частотном, либо во временном представлении сигнала [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. - Рипол классик, 1978]. Для сигнала опорного элемента взаимно-корреляционная функция может не вычисляться: задержка по времени для этого элемента известна и равна нулю.
Вычисленные взаимно-корреляционные функции поступают в блок 3 (Анализ ВКФ), в котором находят максимальное значение каждой взаимно-корреляционной функции и определяют его аргумент τn=arg max {Wn(t)}, который является задержкой по времени между моментами прихода сигналов на элемент антенны номера n и опорный элемент антенны. Из полученных N задержек формируют текущую матрицу задержек, которую передают в блок 4.
В блоке 5 осуществляется сдвиг по времени для сигналов каждого элемента антенны на соответствующую этому элементу задержку из текущей матрицы задержек, после чего формируется суммарный сигнал антенны путем поэлементного сложения сдвинутых сигналов всех элементов:
 .
.
Суммарный сигнал антенны поступает в систему 5 (СЧВО). В системе 5 осуществляются процедуры, характерные для типового тракта обнаружения сигнала, согласно способу-прототипу [Евтютов А.П., Колесников А.Е., Корепин Е.А. Справочник по гидроакустике // Л.: Судостроение. - 1988. С. 6, Гл. 1 Гидроакустические средства]: квадратичное детектирование, полосовая фильтрация и интегрирование. В результате, из системы 5 в блок 6 (Обнаружитель) передается мощность принятого сигнала. Полученная мощность сигнала будет больше, чем мощность сигнала в способе-прототипе, поскольку сложение сигналов отдельных элементов осуществляется после их сдвига на реально измеренные задержки, соответствующие текущему фронту волны любой конфигурации.
В блоке 6 принимается решение об обнаружении или отсутствии обнаружения объекта на основании сравнения мощности принятого сигнала с порогом. Порог обнаружения выбирается, например, на основании заданной вероятности ложных тревог [Тюрин A.M. Введение в теорию статистических методов в гидроакустике // Л.: ВМОЛУА. - 1963].
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ адаптивного обнаружения морского шумящего объекта, который позволит увеличить эффективность обнаружения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ локализации в пространстве шумящего в море объекта | 2023 |
|
RU2816480C1 |
| Способ определения полной совокупности координат морского шумящего объекта | 2023 |
|
RU2817558C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2007 |
|
RU2339050C1 |
| Способ обнаружения шумящих в море объектов | 2018 |
|
RU2694782C1 |
| Способ пассивного определения координат шумящего объекта | 2022 |
|
RU2798390C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩИХ МОРСКИХ ОБЪЕКТОВ | 2022 |
|
RU2810106C2 |
| Способ определения глубины погружения шумящего в море объекта | 2023 |
|
RU2816481C1 |
| Способ обработки шумового сигнала объекта, обнаруженного гидроакустическими пространственно-разнесенными системами | 2022 |
|
RU2787686C1 |
| Способ панорамного обнаружения звука в море | 2021 |
|
RU2776957C1 |
Использование: изобретение относится к области гидроакустики и предназначено для обнаружения морского шумящего объекта с помощью дискретной протяженной антенны. Сущность: кривизна фронта волны в способе учитывается совокупностью задержек в приеме сигнала на отдельные элементы антенны, при этом задержки формируются как аргументы максимума взаимно-корреляционных функций сигнала между отдельными элементами антенны. Это позволяет увеличить результирующую мощность принятого сигнала, а следовательно, улучшить показатели эффективности обнаружения шумящего в море объекта. Технический результат: оперативное измерение и учет кривизны фронта волны, приходящего на апертуру антенны, для синфазного сложения сигналов отдельных элементов. 1 ил.
Способ адаптивного обнаружения морского шумящего объекта, в котором принимают первую и последующие выборки N шумовых сигналов объекта на совокупность N элементов антенны, формируют суммарный сигнал антенны, осуществляя сдвиг сигнала каждого из N элементов антенны на свою задержку по времени и поэлементное сложение сдвинутых сигналов, получают мощность сигнала, последовательно осуществляя детектирование суммарного сигнала, полосовую фильтрацию и интегрирование, сравнивают мощность сигнала с порогом, при превышении порога считают, что шумящий в море объект обнаружен, отличающийся тем, что выбирают один из N элементов антенны в качестве опорного, находят совокупность из N взаимно-корреляционных функций сигнала между сигналом каждого элемента антенны и сигналом опорного элемента, находят максимальное значение в каждой из N взаимно-корреляционных функций, формируют текущую матрицу задержек по времени как матрицу N значений аргументов максимальных значений взаимно-корреляционных функций и обновляют матрицу задержек после каждого следующего приема выборки сигналов, а для формирования суммарного сигнала антенны используют задержки по времени из текущей матрицы задержек.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ (ПЕЛЕНГА И ДИСТАНЦИИ) И ПАРАМЕТРОВ ДВИЖЕНИЯ (КУРСА И СКОРОСТИ) МОРСКОЙ ШУМЯЩЕЙ ЦЕЛИ | 2017 |
|
RU2649887C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681432C1 |
| Способ обнаружения, классификации и определения координат и параметров движения морской шумящей цели | 2018 |
|
RU2692839C1 |
| Способ обнаружения шумящих в море объектов | 2018 |
|
RU2694782C1 |
| Способ адаптивной дихотомической классификации морских объектов | 2019 |
|
RU2730048C1 |
| Способ обнаружения морского движущегося объекта | 2020 |
|
RU2759416C1 |
| Способ обнаружения морской шумящей цели автономной гидроакустической станцией | 2021 |
|
RU2768419C1 |
| CN 110208745 A, 06.09.2019 | |||
| US 10725149 B1, 28.07.2020. | |||

