Область техники, к которой относится изобретение
Настоящее изобретение относится к инструменту, в частности к инструменту, предназначенному для резки или захвата объекта.
Уровень техники
Известны инструменты, используемые для резки или захвата объекта (например, режущие инструменты, захватные инструменты).
В качестве аналога в Патентном документе 1 описан инструмент для резки электрического провода. В инструменте для резки электрического провода, описанном в Патентном документе 1, два рабочих рычага открываются или закрываются, в результате чего осуществляется резка электрического провода.
В инструменте для резки электрического провода, описанном в Патентном документе 1, для разрезания электрического провода к паре рабочих рычагов прикладывается усилие. Хотя прикладывать усилие к паре рабочих рычагов, находящихся на умеренном расстоянии друг от друга, относительно легко, сделать это относительно трудно, когда два рабочих рычага находятся близко друг к другу. Поскольку два рабочих рычага расположены близко друг к другу на окончательном этапе резки электрического провода, относительно трудно стабильно прикладывать большое усилие к двум рабочим рычагам на окончательном этапе резки.
Список ссылочных материалов
Патентные документы
Патентный документ 1: Японская публикация патентной заявки № 2014-100007
Раскрытие сущности изобретения
Техническая задача
Задача настоящего изобретения заключается в создании инструмента, обеспечивающего стабильную передачу усилия к рабочему участку (например, режущему участку или захватному участку) инструмента.
Решение задачи
Объектом изобретения является инструмент, описанный ниже.
(1) Инструмент, содержащий:
первый элемент, выполненный с возможностью поворота вокруг первой оси и включающий в себя первый рабочий участок, предназначенный для контакта с объектом, который является объектом, подлежащим захвату или разрезанию;
второй элемент, выполненный с возможностью поворота вокруг второй оси и включающий в себя второй рабочий участок, предназначенный для контакта с объектом; и
механизм изменения положения, служащий для перевода первого элемента и второго элемента из открытого положения в закрытое путем поворота первого элемента вокруг первой оси и поворота второго элемента вокруг второй оси;
при этом механизм изменения положения содержит:
винт;
подвижный блок, навинченный на винт;
первое звено, соединяющее подвижный блок и первый элемент друг с другом; и
второе звено, соединяющее подвижный блок и второй элемент друг с другом;
причем при перемещении подвижного блока в направлении вдоль продольной оси винта первый элемент и второй элемент переходят из открытого положения в закрытое положение.
(2) Инструмент по вышеуказанному п. (1), в котором первая ось и вторая ось совпадают.
(3) Инструмент по вышеуказанному п. (1) или (2), в котором первый элемент и второй элемент переходят из открытого положения в закрытое положение при перемещении подвижного блока в сторону первого элемента и второго элемента.
(4) Инструмент по любому из вышеуказанных пп. (1)–(3), в котором первое звено содержит первый нижний конец, шарнирно соединенный с подвижным блоком;
причем второе звено содержит второй нижний конец, шарнирно соединенный с подвижным блоком;
при этом на виде спереди первый нижний конец расположен на расстоянии от винта, и второй нижний конец расположен на расстоянии от винта.
(5) Инструмент по любому из вышеуказанных пп. (1)–(4), который дополнительно содержит нижний элемент, поддерживающий винт с возможностью вращения;
при этом нижний элемент содержит первую соединительную часть, выполненную с возможностью входа в зацепление с неподвижной частью удаленного рабочего инструмента;
причем нижний конец винта содержит вторую соединительную часть, выполненную с возможностью входа в зацепление с подвижной частью удаленного рабочего инструмента.
(6) Инструмент по любому из вышеуказанных пп. (1)–(5), который дополнительно содержит:
третий элемент, выполненный с возможностью поворота вокруг первой оси и включающий в себя третий рабочий участок, предназначенный для контакта с объектом; и
четвертый элемент, выполненный с возможностью поворота вокруг второй оси и включающий в себя четвертый рабочий участок, предназначенный для контакта с объектом.
(7) Инструмент по любому из вышеуказанных пп. (1)–(6), в котором первое звено соединено с подвижным блоком с возможностью поворота вокруг третьей оси;
причем первое звено соединено с первым элементом с возможностью поворота вокруг четвертой оси;
при этом второе звено соединено с подвижным блоком с возможностью поворота вокруг пятой оси; и
причем второе звено соединено со вторым элементом с возможностью поворота вокруг шестой оси.
(8) Инструмент по любому из вышеуказанных пп. (1)–(6), в котором первое звено содержит первый рычажный элемент и второй рычажный элемент;
причем второе звено содержит третий рычажный элемент и четвертый рычажный элемент;
при этом нижний конец первого рычажного элемента соединен с подвижным блоком с возможностью поворота вокруг третьей оси;
причем верхний конец первого рычажного элемента соединен с нижним концом второго рычажного элемента с возможностью поворота вокруг первой соединительной оси;
при этом верхний конец второго рычажного элемента соединен с первым элементом с возможностью поворота вокруг четвертой оси;
причем нижний конец третьего рычажного элемента соединен с подвижным блоком с возможностью поворота вокруг пятой оси;
при этом верхний конец третьего рычажного элемента соединен с нижним концом четвертого рычажного элемента с возможностью поворота вокруг второй соединительной оси;
причем верхний конец четвертого рычажного элемента соединен со вторым элементом с возможностью поворота вокруг шестой оси.
(9) Инструмент по любому из вышеуказанных пп. (1)–(8), в котором любые пять элементов из подвижного блока, первого элемента, второго элемента, одного или более рычажных элементов, образующих первое звено, и одного или более рычажных элементов, образующих второе звено, расположены в виде пятиугольника.
Полезный эффект изобретения
Настоящим изобретением предлагается инструмент, обеспечивающий стабильную передачу усилия к рабочему участку (например, режущему участку или захватному участку) инструмента.
Краткое описание чертежей
На фиг. 1 показан схематичный вид с двух сторон инструмента согласно первому варианту осуществления изобретения;
на фиг. 2 – схематичный вид сзади инструмента согласно первому варианту осуществления изобретения;
на фиг. 3 – схематичный вид с двух сторон инструмента согласно первому варианту осуществления изобретения;
на фиг. 4 – схематичный вид сзади инструмента согласно первому варианту осуществления изобретения;
на фиг. 5 – схематичный вид в плане, иллюстрирующий пример выполнения подвижного блока;
на фиг. 6 – схематичный вид с двух сторон инструмента согласно второму варианту осуществления изобретения.
Осуществление изобретения
Ниже приведено подробное описание возможных вариантов выполнения инструмента 1 со ссылками на прилагаемые чертежи. Следует отметить, что в данном описании элементы, выполняющие одинаковые функции, обозначены одинаковыми или аналогичными ссылочными позициями. Кроме того, повторное описание элементов, обозначенных одинаковыми или аналогичными ссылочными позициями, может быть опущено.
Первый вариант осуществления изобретения
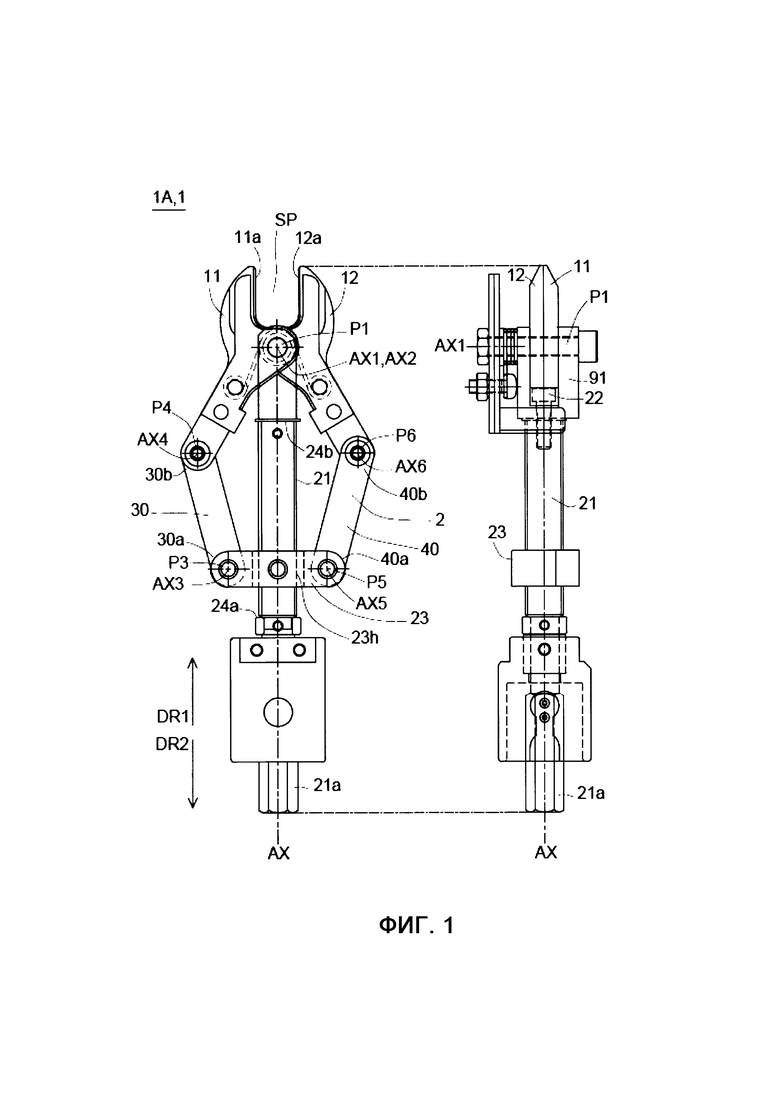
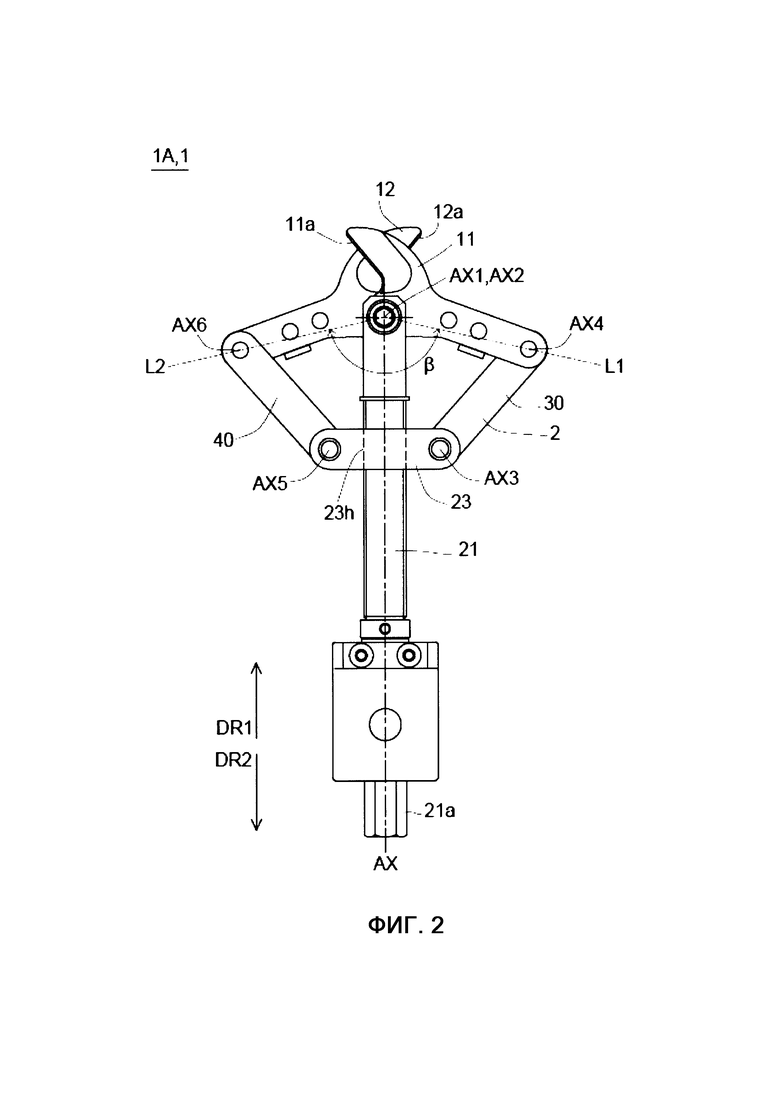
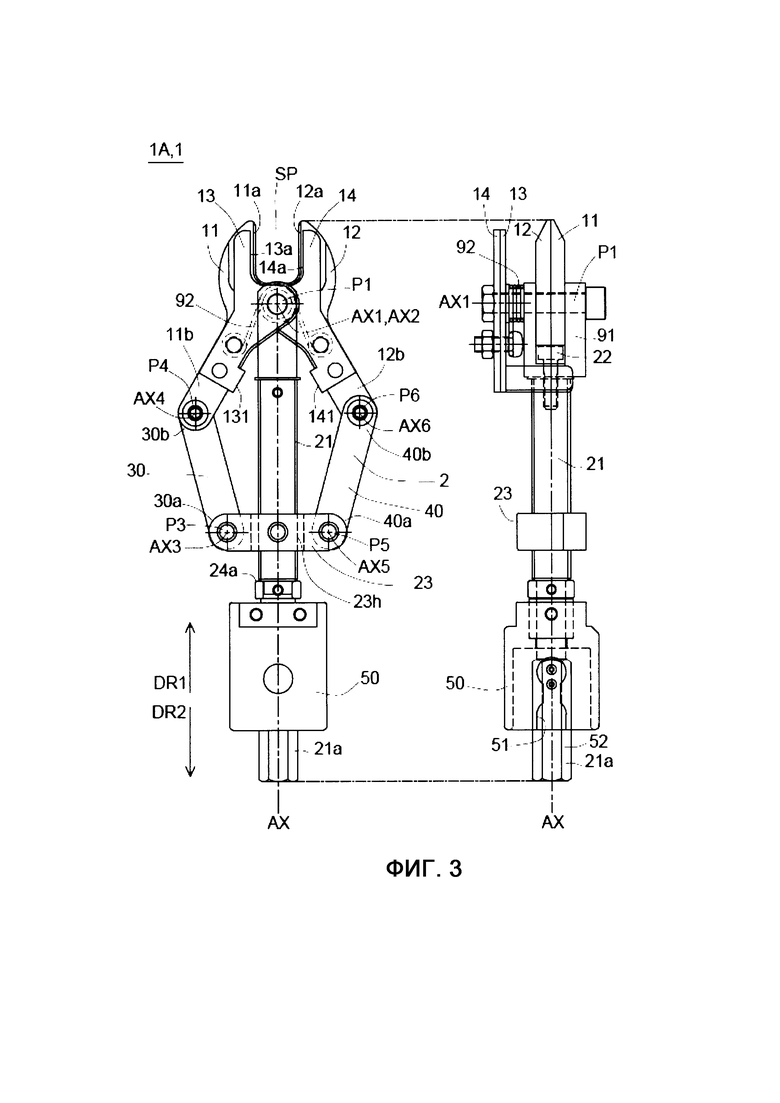
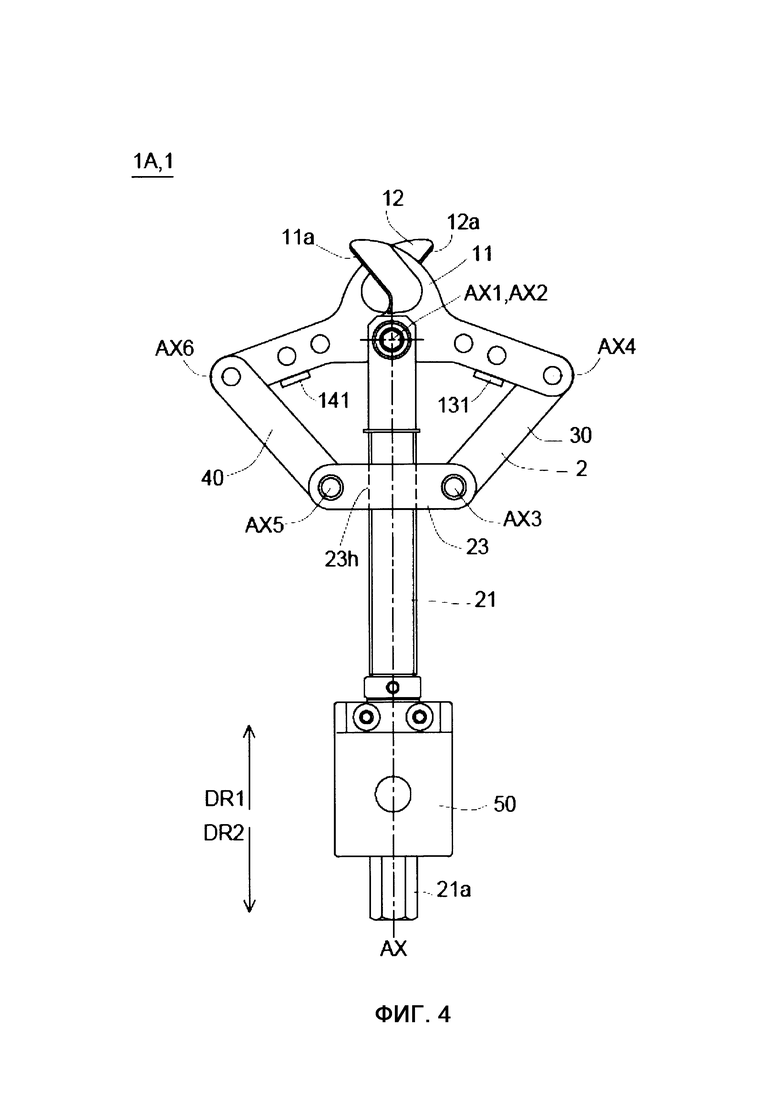
Инструмент 1A согласно первому варианту осуществления изобретения показан на фиг. 1–5. На фиг. 1 и 3 показаны схематичные виды с двух сторон инструмента 1A согласно первому варианту осуществления изобретения. Слева на фиг. 1 и 3 приведен схематичный вид спереди инструмента 1A, а справа на фиг. 1 и 3 приведен схематичный вид сбоку инструмента 1A. Во избежание загромождения чертежа на видах сбоку инструмента 1A второе звено 40 не показано. На фиг. 2 и 4 представлены схематичные виды сзади инструмента 1A согласно первому варианту осуществления изобретения. На фиг. 5 приведен схематичный вид в плане, иллюстрирующий пример подвижного блока 23.
Как показано на фиг. 1, первый элемент 11 и второй элемент 12 инструмента 1A находятся в открытом положении. Открытым положением считается положение, в котором объект, подлежащий резанию или захвату, может быть введен в пространство SP между первым рабочим участком 11a первого элемента и вторым рабочим участком 12a второго элемента 12 (или положение, в котором объект, подлежащий резанию или захвату, может быть извлечен из пространства SP между первым рабочим участком 11a и вторым рабочим участком 12a). Далее везде "объект, подлежащий резанию" и "объект, подлежащий захвату" обозначены одним термином "объект". Иными словами, "объект" означает "объект, подлежащий резанию, или объект, подлежащий захвату".
На фиг. 2 первый элемент 11 и второй элемент 12 инструмента 1A находятся в закрытом положении. Закрытым положением считается положение, в котором объект может быть разрезан или захвачен первым рабочим участком 11a и вторым рабочим участком 12a. В случае, если инструмент 1A является захватным инструментом, то закрытым положением считается положение, в котором расстояние между первым рабочим участком 11a и вторым рабочим участком 12a меньше, чем в открытом положении. Кроме того, если инструмент 1A является режущим инструментом, закрытым положением является положение, в котором первая лезвийная часть, являющаяся первым рабочим участком 11a, и вторая лезвийная часть, являющаяся вторым рабочим участком 12a, пересекаются друг с другом на виде спереди (т. е. при взгляде в направлении вдоль первой оси AX1, описанной ниже), или положение, в котором первая лезвийная часть и вторая лезвийная часть находятся в контакте друг с другом.
После помещения объекта в пространство SP между первым рабочим участком 11a и вторым рабочим участком 12a, когда первый элемент 11 и второй элемент 12 переходят из открытого положения в закрытое положение, объект разрезается или захватывается первым рабочим участком 11a и вторым рабочим участком 12a.
Инструмент 1A согласно первому варианту осуществления изобретения содержит первый элемент 11, второй элемент 12 и механизм 2 изменения положения.
Первый элемент 11 включает в себя первый рабочий участок 11a, который может контактировать с объектом. Если инструмент 1A является режущим инструментом, первый рабочий участок 11a представляет собой первую лезвийную часть, а если инструмент 1A является захватным инструментом, первый рабочий участок 11a представляет собой первую захватную часть.
Первый элемент 11 может поворачиваться вокруг первой оси AX1. В примере, показанном на фиг. 1, стержневой элемент P1 (первый стержневой элемент) проходит как через первый элемент 11, так и через второй элемент 12, при этом первый элемент 11 может поворачиваться относительно стержневого элемента P1. Иными словами, центральная ось стержневого элемента P1 совпадает с первой осью AX1. Следует отметить, что хотя в примере, показанном на фиг. 1, первый элемент 11 изображен в виде цельной детали (например, в виде цельного пластинчатого элемента), он также может состоять из нескольких деталей.
Второй элемент 12 включает в себя второй рабочий участок 12a, который может контактировать с объектом. Если инструмент 1A является режущим инструментом, второй рабочий участок 12a представляет собой вторую лезвийную часть, а если инструмент 1A является захватным инструментом, второй рабочий участок 12a представляет собой вторую захватную часть.
Второй элемент 12 может поворачиваться вокруг второй оси AX2. В примере, показанном на фиг. 1, второй элемент 12 может поворачиваться относительно стержневого элемента P1. Иными словами, центральная ось стержневого элемента P1 совпадает со второй осью AX2. Следует отметить, что, хотя в примере, показанном на фиг. 1, ось вращения первого элемента 11 (первая ось AX1) и ось вращения второго элемента 12 (вторая ось AX2) совпадают друг с другом, они также могут быть расположены параллельно друг другу. Кроме того, хотя в примере, показанном на фиг. 1, второй элемент 12 изображен в виде цельной детали (например, в виде цельного пластинчатого элемента), он также может состоять из нескольких деталей.
Механизм 2 изменения положения предназначен для перевода первого элемента 11 и второго элемента 12 из открытого положения в закрытое путем поворота первого элемента 11 вокруг первой оси AX1 и поворота второго элемента 12 вокруг второй оси AX2. В процессе перехода первого элемента 11 и второго элемента 12 из открытого положения в закрытое объект зажимается первым рабочим участком 11a и вторым рабочим участком 12a. Когда первый элемент 11 и второй элемент 12 находятся в закрытом положении, происходит разрезание или зажатие объекта первым рабочим участком 11a и вторым рабочим участком 12a.
Механизм 2 изменения положения включает в себя винт 21, подвижный блок 23, навинченный на винт 21, первое звено 30 и второе звено 40.
На наружной поверхности винта 21 выполнена наружная резьба. При вращении винта 21 в первом направлении вращения (например, против часовой стрелки) вокруг продольной оси AX винта 21 подвижный блок 23 линейно перемещается в первом направлении DR1. Первым направлением DR1 является, например, направление вдоль винта 21 от нижнего конца винта 21 к первому рабочему участку 11a и второму рабочему участку 12a. С другой стороны, при вращении винта 21 во втором направлении вращения (например, по часовой стрелке) вокруг продольной оси AX винта 21 подвижный блок 23 линейно перемещается во втором направлении DR2. Вторым направлением DR2 является, например, направление вдоль винта 21 от первого рабочего участка 11a и второго рабочего участка 12a к нижнему концу винта 21. Следует отметить, что первым направлением вращения может считаться направление по часовой стрелке, а вторым направлением вращения – против часовой стрелки.
В варианте осуществления изобретения, показанном на фиг. 1, верхний конец винта 21 с помощью крепежного элемента 22 соединен с опорным элементом 91 для стержневого элемента, поддерживающим стержневой элемент P1 (первый стержневой элемент). Как показано на фиг. 1, верхний конец винта 21 соединен с опорным элементом 91 для стержневого элемента с возможностью вращения вокруг продольной оси AX винта 21. Таким образом, опорный элемент 91 для стержневого элемента не мешает вращению винта 21.
Подвижный блок 23 содержит резьбовое отверстие 23h, в которое ввинчивается винт 21. На внутренней поверхности резьбового отверстия 23h выполнена резьба. Подвижный блок 23 может перемещаться вдоль винта 21. Ход перемещения подвижного блока 23 определяется расстоянием между нижним упором 24a и верхним упором 24b на винте 21. Хотя в примере, показанном на фиг. 1, подвижный блок 23 изображен в виде цельной детали, он также может состоять из нескольких деталей.
Первое звено 30 соединяет подвижный блок 23 и первый элемент 11 друг с другом.
В примере, показанном на фиг. 1, первый нижний конец 30a первого звена 30 соединен с подвижным блоком 23 с возможностью поворота вокруг третьей оси AX3. Более конкретно, стержневой элемент P3 (второй стержневой элемент) проходит как через первое звено 30, так и через подвижный блок 23, при этом первое звено 30 может поворачиваться относительно стержневого элемента P3.
В примере, показанном на фиг. 1, верхний конец 30b первого звена 30 соединен с нижним концом первого элемента 11 с возможностью поворота вокруг четвертой оси AX4. Более конкретно, стержневой элемент P4 (третий стержневой элемент) проходит как через первое звено 30, так и через первый элемент 11, при этом первое звено 30 может поворачиваться относительно стержневого элемента P4.
Хотя в примере, показанном на фиг. 1, первое звено 30 выполнено в виде цельной детали (например, цельного пластинчатого элемента), оно также может состоять из нескольких деталей.
Второе звено 40 соединяет подвижный блок 23 и второй элемент 12 друг с другом.
В примере, показанном на фиг. 1, второй нижний конец 40a второго звена 40 соединен с подвижным блоком 23 с возможностью поворота вокруг пятой оси AX5. Более конкретно, стержневой элемент P5 (четвертый стержневой элемент) проходит как через второе звено 40, так и через подвижный блок 23, при этом второе звено 40 может поворачиваться относительно стержневого элемента P5.
В примере, показанном на фиг. 1, верхний конец 40b второго звена 40 соединен с нижним концом второго элемента 12 с возможностью поворота вокруг шестой оси AX6. Более конкретно, стержневой элемент P6 (пятый стержневой элемент) проходит как через второе звено 40, так и через второй элемент 12, при этом второе звено 40 может поворачиваться относительно стержневого элемента P6.
Хотя в примере, показанном на фиг. 1, второе звено 40 выполнено в виде цельной детали (например, цельного пластинчатого элемента), оно также может состоять из нескольких деталей.
В инструменте 1A согласно первому варианту осуществления изобретения подвижный блок 23 перемещается вдоль продольной оси AX винта 21, и, таким образом, первый элемент 11 и второй элемент 12 переводятся из открытого положения (например, положения, в котором объект может быть введен в пространство SP между первым рабочим участком 11a и вторым рабочим участком 12a) во второе положение (например, положение, в котором объект может быть разрезан или захвачен). Таким образом, даже на окончательном этапе разрезания или захвата с помощью подвижного блока 23 к первому элементу 11 и второму элементу 12 можно стабильно передавать рабочее усилие.
Ниже подробно описан процесс разрезания или захвата объекта первым рабочим участком 11a первого элемента 11 и вторым рабочим участком 12a второго элемента 12.
На этапе, показанном на фиг. 1, винт 21 вращается в первом направлении вращения. Вращение винта 21 осуществляется, например, путем воздействия на нижний конец 21a винта 21 (точнее, путем вращения нижнего конца 21a винта 21 вокруг продольной оси AX винта 21).
Вращение винта 21 в первом направлении вращения приводит к перемещению подвижного блока 23 вдоль продольной оси AX винта 21. В примере, показанном на фиг. 1, подвижный блок 23 перемещается в первом направлении DR1.
При перемещении подвижного блока 23 вдоль продольной оси AX винта 21 изменяется расстояние между подвижным блоком 23 и первой осью AX1 (или второй осью AX2). В примере, показанном на фиг. 1, при перемещении подвижного блока 23 в первом направлении DR1 расстояние между подвижным блоком 23 и первой осью AX1 уменьшается. При уменьшении расстояния между подвижным блоком 23 и первой осью AX1 четвертая ось AX4 смещается в сторону от винта 21. Аналогичным образом, при перемещении подвижного блока 23 в первом направлении DR1 расстояние между подвижным блоком 23 и второй осью AX2 уменьшается. При уменьшении расстояния между подвижным блоком 23 и второй осью AX2 шестая ось AX6 смещается в сторону от винта 21.
Смещение четвертой оси AX4 в сторону от винта 21 приводит к повороту нижнего конца первого звена 30 вокруг третьей оси AX3 и заставляет первый элемент 11 поворачиваться вокруг первой оси AX1. Таким образом, первый рабочий участок 11a первого элемента 11 перемещается ближе ко второму рабочему участку 12a. Кроме того, перемещение шестой оси AX6 в сторону от винта 21 приводит к повороту нижнего конца второго звена 40 вокруг пятой оси AX5 и заставляет второй элемент 12 поворачиваться вокруг второй оси AX2. Таким образом, второй рабочий участок 12a второго элемента 12 перемещается ближе к первому рабочему участку 11a.
Когда первый рабочий участок 11a и второй рабочий участок 12a приближаются друг к другу, происходит разрезание или захват объекта первым рабочим участком 11a и вторым рабочим участком 12a.
В примере, показанном на фиг. 1 и 2, когда подвижный блок 23 перемещается в сторону первого элемента 11 и второго элемента 12 (иными словами, в первом направлении DR1), первый элемент 11 и второй элемент 12 переводятся из открытого положения в закрытое положение. Иными словами, усилие толкания подвижного блока 23 в сторону верхнего конца используется для резания или захвата объекта первым рабочим участком 11a и вторым рабочим участком 12a. Таким образом, механизм передачи усилия к рабочим участкам (11a, 12a) упрощается, а перемещение подвижного блока 23 эффективно преобразуется в усилие резания для резания объекта или в усилие захвата для захвата объекта.
В примере, показанном на фиг. 2, где первый элемент 11 и второй элемент 12 находятся в закрытом положении, угол β между прямой L1, соединяющей первую ось AX1 с четвертой осью AX4 на виде спереди, и прямой L2, соединяющей шестую ось AX6 со второй осью AX2 на виде спереди (на фиг. 2 вторая ось AX2 и первая ось AX1 совпадают), является относительно большим. В этом случае на окончательном этапе разрезания или захвата можно стабильно передавать рабочее усилие к первому элементу 11 и второму элементу 12. Следует отметить, что величина вышеуказанного угла β может составлять 0° ≤ β ≤ 180°, более предпочтительно 120° ≤ β ≤ 180°.
Примеры необязательных конфигураций, которые могут быть использованы в первом варианте осуществления изобретения, описаны ниже со ссылками на фиг. 3 и 4.
Расположение осей от первой оси AX1 до шестой оси AX6
В примере, показанном на фиг. 3 и 4, первая ось AX1 расположена выше (в первом направлении DR1) третьей оси AX3 и четвертой оси AX4, независимо от того, находятся ли первый элемент 11 и второй элемент 12 в открытом положении или в закрытом положении. Кроме того, первая ось AX1 расположена ближе к продольной оси AX винта 21, чем третья ось AX3 и четвертая ось AX4. Кроме того, вторая ось AX2 расположена выше (в первом направлении DR1) пятой оси AX5 и шестой оси AX6, независимо от того, находятся ли первый элемент 11 и второй элемент 12 в открытом положении или в закрытом положении, при этом вторая ось AX2 расположена ближе к продольной оси AX винта 21, чем пятая ось AX5 и шестая ось AX6.
В примере, показанном на фиг. 3 и 4, третья ось AX3 расположена ниже (во втором направлении DR2) четвертой оси AX4, независимо от того, находятся ли первый элемент 11 и второй элемент 12 в открытом положении или в закрытом положении. Кроме того, третья ось AX3 расположена ближе к продольной оси AX винта 21, чем четвертая ось AX4. Кроме того, пятая ось AX5 расположена ниже (во втором направлении DR2) шестой оси AX6, независимо от того, находятся ли первый элемент 11 и второй элемент 12 в открытом положении или в закрытом положении, при этом пятая ось AX5 расположена ближе к продольной оси AX винта 21, чем шестая ось AX6.
Формы, образуемые первым звеном 30, вторым звеном 40 и т. п.
В примере, показанном на фиг. 3 и 4, подвижный блок 23, первое звено 30, первый элемент 11, второй элемент 12 и второе звено 40 образуют пятиугольник. Подвижный блок 23 образует основание этого пятиугольника. Когда подвижный блок 23 перемещается в первом направлении DR1, это приводит к увеличению ширины (т. е. расстояния в направлении, перпендикулярном продольной оси AX) пятиугольника, образованного подвижным блоком 23, первым звеном 30, первым элементом 11, вторым элементом 12 и вторым звеном 40. При увеличении ширины пятиугольника, т. е. увеличении расстояния между четвертой осью AX4 и шестой осью AX6, усилие, прикладываемое к подвижному блоку 23, эффективно передается первому элементу 11 и второму элементу 12 через первое звено 30 и второе звено 40.
В примере, показанном на фиг. 3 и 4, нижний конец первого звена 30 (т. е. первый нижний конец 30a, шарнирно соединенный с подвижным блоком 23) находится на расстоянии от винта 21 на виде спереди или виде сзади. Нижний конец второго звена 40 (т. е. второй нижний конец 40a, шарнирно соединенный с подвижным блоком 23) находится на расстоянии от винта 21 на виде спереди или виде сзади. В этом случае длина звеньев (30,40) на виде спереди и виде сзади может становиться меньше, чем в случае, когда первый нижний конец 30a и второй нижний конец 40a накладываются на винт 21. Таким образом, уменьшается ход перемещения подвижного блока 23, при котором происходит открывание и закрывание рабочих элементов.
Нижний элемент 50
В примере, показанном на фиг. 3, инструмент 1A содержит нижний элемент 50, который служит опорой для винта 21. Нижний элемент 50 поддерживает винт 21 так, что винт 21 может вращаться вокруг продольной оси AX. В примере, показанном на фиг. 3, винт 21 поддерживается нижним элементом 50 и опорным элементом 91 для стержневого элемента.
Нижний элемент 50 содержит первую соединительную часть 51, которая входит в зацепление с неподвижной частью удаленного рабочего инструмента. В примере, показанном на фиг. 3, в качестве первой соединительной части 51 используется соединительная канавка. Нижний элемент 50 соединен с удаленным рабочим инструментом, благодаря чему инструмент 1A может быть использован для резки или захвата объекта, находящегося на удалении от оператора. Инструмент 1A, соединенный с удаленным рабочим инструментом, может использоваться как инструмент для резания или захвата подвешенного на высоте электрического провода. Следует отметить, что длина удаленного рабочего инструмента выбирается в соответствии с расстоянием между оператором и объектом. Таким образом, длина удаленного рабочего инструмента может быть любой.
В примере, показанном на фиг. 3, нижний конец 21a винта 21 содержит вторую соединительную часть 52, которая входит в зацепление с подвижной частью удаленного рабочего инструмента. В примере, показанном на фиг. 3, по меньшей мере часть второй соединительной части 52 расположена в полости внутри нижнего элемента 50. В примере, показанном на фиг. 3, форма поперечного сечения второй соединительной части 52 (по плоскости, перпендикулярной продольной оси AX винта 21) представляет собой многоугольник (например, шестиугольник). Однако поперечное сечение второй соединительной части 52 может иметь форму не только многоугольника.
Далее будет описан способ работы инструмента 1A с помощью удаленного рабочего инструмента. На подготовительном этапе неподвижную часть удаленного рабочего инструмента соединяют с первой соединительной частью 51, а подвижную часть удаленного рабочего инструмента вводят в зацепление со второй соединительной частью 52. Затем приводится в действие удаленный рабочий инструмент, и подвижная часть удаленного рабочего инструмента движется (например, вращается вокруг продольной оси AX винта 21). В результате движения подвижной части удаленного рабочего инструмента вторая соединительная часть 52, соединенная с подвижной частью, также движется (например, вращается вокруг продольной оси AX винта 21). Движение второй соединительной части 52 заставляет винт 21 вращаться вокруг продольной оси AX винта 21. Поскольку механизм преобразования вращения винта 21 в движение открывания и закрывания первого элемента 11 и второго элемента 12 уже был описан выше, он не будет описан повторно.
В примере, показанном на фиг. 3, инструмент 1A содержит нижний элемент 50, служащий опорой для винта 21, при этом нижний элемент 50 содержит первую соединительную часть 51, которая входит в зацепление с неподвижной частью удаленного рабочего инструмента. Таким образом, инструмент 1A может быть использован как инструмент для резания или захвата объекта, находящегося на расстоянии от оператора. Кроме того, инструмент 1A, помимо первой соединительной части 51, входящей в зацепление с неподвижной частью удаленного рабочего инструмента, содержит вторую соединительную часть 52, которая входит в зацепление с подвижной частью удаленного рабочего инструмента. Таким образом, благодаря второй соединительной части 52 обеспечивается возможность стабильной работы инструмента 1A, поддерживаемого с помощью первой соединительной части 51.
Третий элемент 13 и четвертый элемент 14
В примере, показанном на фиг. 3 и 4, инструмент 1A, помимо первого элемента 11 и второго элемента 12, содержит третий элемент 13 и четвертый элемент 14. Третий элемент 13 содержит третий рабочий участок 13a, который может вступать в контакт с объектом, подлежащим резанию или захвату, а четвертый элемент 14 содержит четвертый рабочий участок 14a, который может вступать в контакт с объектом, подлежащим резанию или захвату.
В примере, показанном на фиг. 3 и 4, первый рабочий участок 11a, второй рабочий участок 12a, третий рабочий участок 13a и четвертый рабочий участок 14a представляют собой, соответственно, первую лезвийную часть, вторую лезвийную часть, первую захватную часть и вторую захватную часть. В этом случае разрезание объекта может осуществляться первым рабочим участком 11a и вторым рабочим участком 12a, а захват объекта может осуществляться третьим рабочим участком 13a и четвертым рабочим участком 14a. Это устраняет смещение объекта при разрезании. В качестве альтернативы первый рабочий участок 11a и второй рабочий участок 12a могут быть захватными участками, а третий рабочий участок 13a и четвертый рабочий участок 14a могут быть режущими участками.
В примере, показанном на фиг. 3 и 4, третий элемент 13 может поворачиваться вокруг первой оси AX1. Более конкретно, третий элемент 13 установлен с возможностью поворота на стержневом элементе P1. Поскольку первый элемент 11 и третий элемент 13 могут поворачиваться вокруг общей оси (первой оси AX1), обеспечивается плавное взаимодействие первого элемента 11 с третьим элементом 13 (т. е. захват или разрезание объекта).
В примере, показанном на фиг. 3 и 4, четвертый элемент 14 может поворачиваться вокруг второй оси AX2. Более конкретно, четвертый элемент 14 установлен с возможностью поворота на стержневом элементе P1. Поскольку второй элемент 12 и четвертый элемент 14 могут поворачиваться вокруг общей оси (второй оси AX2), обеспечивается плавное взаимодействие второго элемента 12 с четвертым элементом 14 (т. е. захват или разрезание объекта). Следует отметить, что первая ось AX1 и вторая ось AX2 могут совпадать, но могут и не совпадать.
Инструмент 1A может содержать поджимной элемент 92, который оказывает давление на третий элемент 13 (точнее, на третий рабочий участок 13a) и на четвертый элемент 14 (точнее, на четвертый рабочий участок 14a), стремясь переместить их в закрытое положение. В качестве поджимного элемента 92 может использоваться, например, торсионная спиральная пружина, первый конец которой находится в контакте с третьим элементом 13, а второй конец находится в контакте с четвертым элементом 14.
В случае, когда инструмент 1A содержит поджимной элемент 92, за счет толкающего усилия поджимного элемента 92 обеспечивается стабильный захват объекта третьим рабочим участком 13a и четвертым рабочим участком 14a. Кроме того, когда захват объекта производится с использованием толкающего усилия поджимного элемента 92, на объект не действует избыточное захватное усилие. Таким образом, устраняется вероятность повреждения объекта при его захвате третьим рабочим участком 13a и четвертым рабочим участком 14a.
В примере, показанном на фиг. 3 и 4, третий элемент 13 содержит первую рабочую часть 131, приводимую в действие первым элементом 11. Четвертый элемент 14 содержит вторую рабочую часть 141, приводимую в действие вторым элементом 12.
Когда первый элемент 11 и второй элемент 12 переходят из закрытого положения в открытое положение, первый элемент 11 оказывает давление на первую рабочую часть 131, а второй элемент 12 оказывает давление на вторую рабочую часть 141. Таким образом, третий элемент 13 (точнее, третий рабочий участок 13a) и четвертый элемент 14 (точнее, четвертый рабочий участок 14a) переходят из закрытого положения в открытое положение, преодолевая толкающее усилие поджимного элемента 92.
Следует отметить, что в примере, показанном на фиг. 3 и 4, давление на первую рабочую часть 131 оказывается с помощью рычажного участка 11b (участка первого элемента 11, удаленного от первой оси AX1), а давление на вторую рабочую часть 141 оказывается с помощью рычажного участка 12b (участка второго элемента 12, удаленного от второй оси AX2).
Подвижный блок 23
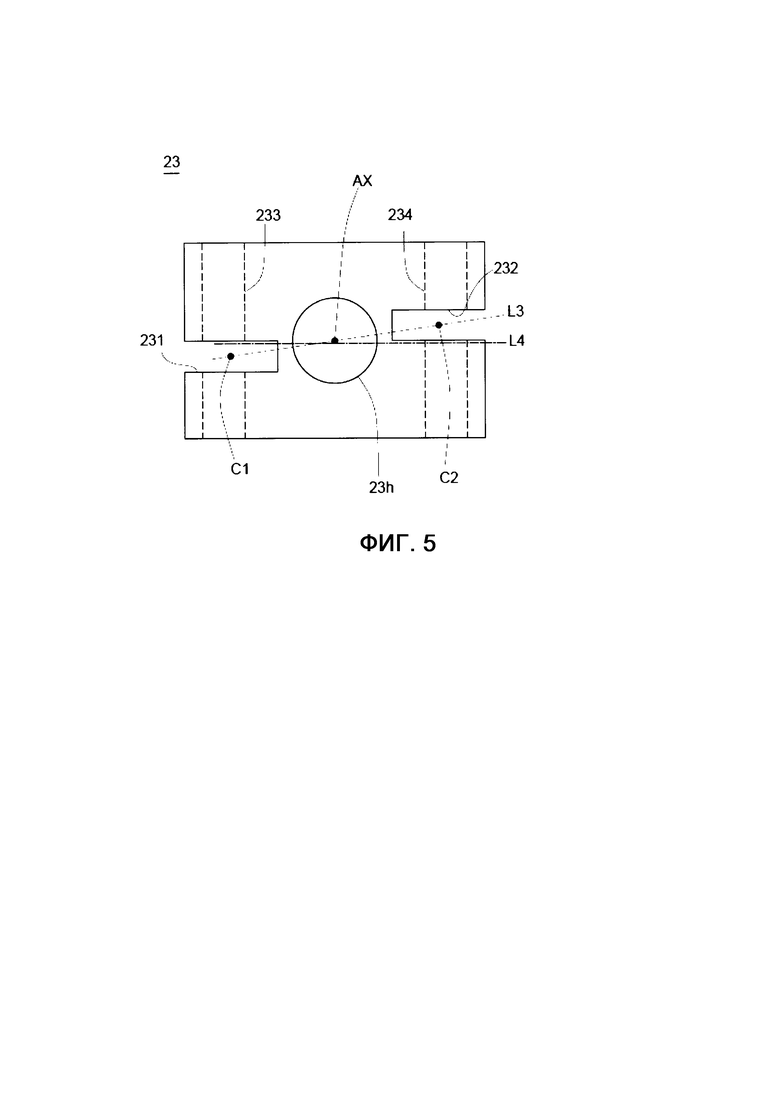
Ниже будет подробно рассмотрен пример конструкции подвижного блока 23 со ссылками на фиг. 5.
Подвижный блок 23 содержит резьбовое отверстие 23h в центральной области на виде в плане (иными словами, при взгляде в направлении вдоль продольной оси AX винта 21). Кроме того, подвижный блок 23 содержит первый вырез 231, в который входит первый нижний конец 30a первого звена 30 (точнее, первый приемный паз), и второй вырез 232, в который входит второй нижний конец 40a второго звена 40 (точнее, второй приемный паз) на виде в плане.
В примере, показанном на фиг. 5, первый вырез 231 и второй вырез 232 расположены в краевых областях подвижного блока 23. Кроме того, в примере, показанном на фиг. 5, первый вырез 231 и второй вырез 232 расположены таким образом, чтобы резьбовое отверстие 23h находилось между ними. Как показано на фиг. 5, первый вырез 231 и второй вырез 232 могут быть расположены симметрично в осевом направлении относительно резьбового отверстия 23h. В этом случае сила, действующая на подвижный блок 23, передается практически равномерно на первое звено 30, расположенное в первом вырезе 231, и второе звено 40, расположенное во втором вырезе 232. Следует отметить, что в примере, показанном на фиг. 5, прямая L3, проходящая через центр C1 первого выреза 231 и центр C2 второго выреза 232, расположена с наклоном относительно прямой L4, параллельной осевому направлению подвижного блока 23 на виде в плане (иными словами, при взгляде в направлении вдоль продольной оси AX винта 21). В качестве альтернативы прямая L3, проходящая через центр C1 первого выреза 231 и центр C2 второго выреза 232, может быть расположена параллельно прямой L4, параллельной направлению ширины подвижного блока 23.
В примере, показанном на фиг. 5, в подвижном блоке 23 выполнены также первое приемное отверстие 233, служащее для вставки в него стержневого элемента P3, и второе приемное отверстие 234, служащее для вставки в него стержневого элемента P5. Стержневой элемент P3 вставляется в первое приемное отверстие 233, когда первое звено 30 расположено в первом вырезе 231, в результате чего первое звено 30 оказывается шарнирно установленным на стержневом элементе P3. Кроме того, стержневой элемент P5 вставлен во второе приемное отверстие 234, когда второе звено 40 расположено во втором вырезе 232, в результате чего второе звено 40 оказывается шарнирно установленным на стержневом элементе P5.
В примере, показанном на фиг. 5, направление прохождения первого приемного отверстия 233 перпендикулярно направлению прохождения резьбового отверстия 23h. Кроме того, направление прохождения второго приемного отверстия 234 параллельно направлению прохождения первого приемного отверстия 233. Расстояние между первым приемным отверстием 233 и резьбовым отверстием 23h равно расстоянию между вторым приемным отверстием 234 и резьбовым отверстием 23h.
Второй вариант осуществления изобретения
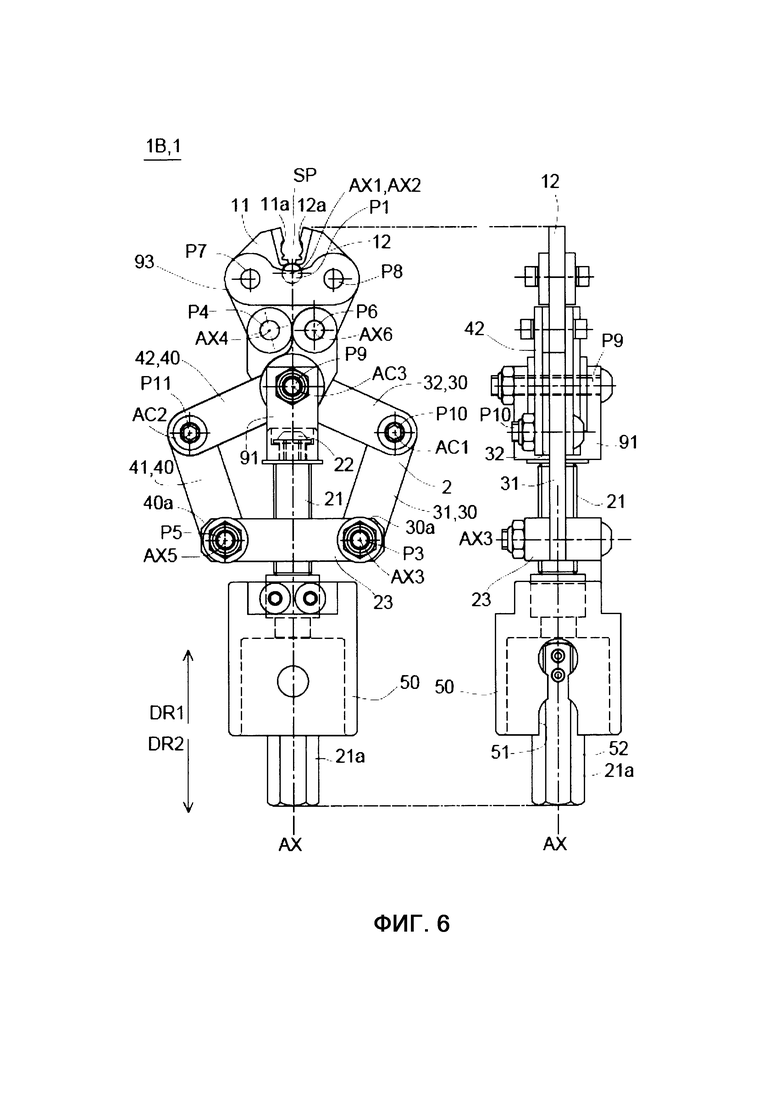
Далее приведено описание второго варианта выполнения инструмента 1B со ссылками на фиг. 6. На фиг. 6 приведен схематичный вид с двух сторон инструмента 1B согласно второму варианту осуществления изобретения. Слева на фиг. 6 приведен схематичный вид спереди инструмента 1B, а справа на фиг. 6 приведен схематичный вид сбоку инструмента 1B.
В инструменте 1B согласно второму варианту осуществления изобретения первое звено 30 включает в себя первый рычажный элемент 31 и второй рычажный элемент 32, а второе звено 40 включает в себя третий рычажный элемент 41 и четвертый рычажный элемент 42.
Для второго варианта осуществления изобретения в основном будут описаны признаки, отличные от признаков первого варианта осуществления изобретения, при этом элементы, уже описанные в отношении первого варианта осуществления изобретения, во втором варианте осуществления изобретения повторно рассматриваться не будут. Таким образом, очевидно, что даже если это явно не указано во втором варианте осуществления изобретения, элементы, которые уже были описаны при рассмотрении первого варианта, могут быть также использованы и во втором варианте.
Инструмент 1B согласно второму варианту осуществления изобретения включает в себя первый элемент 11, второй элемент 12 и механизм 2 изменения положения, причем механизм 2 изменения положения включает в себя винт 21, подвижный блок 23, первое звено 30 и второе звено 40, точно так же, как и инструмент 1A согласно первому варианту осуществления изобретения.
В примере, показанном на фиг. 6, между первым элементом 11 и вторым элементом 12 расположена первая ось AX1 (или стержневой элемент P1). Кроме того, первый элемент 11 и второй элемент 12 соединены друг с другом соединительным элементом 93. Стержневой элемент P7 вставлен в соединительный элемент 93 и первый элемент 11, так что первый элемент 11 может поворачиваться вокруг центральной оси стержневого элемента P7 относительно соединительного элемента 93. Кроме того, стержневой элемент P8 вставлен в соединительный элемент 93 и второй элемент 12, так что второй элемент 12 может поворачиваться вокруг центральной оси стержневого элемента P8 относительно соединительного элемента 93.
В примере, показанном на фиг. 6, первая ось AX1 расположена между первым элементом 11 и вторым элементом 12, при этом первый элемент 11 и второй элемент 12 соединены друг с другом соединительным элементом 93. В качестве альтернативы первая ось AX1 может проходить через первый элемент 11 и второй элемент 12, при этом первый элемент 11 и второй элемент 12 могут быть соединены друг с другом стержневым элементом P1, как в примере, показанном на фиг. 1. И наоборот, соединительная конструкция между первым элементом 11 и вторым элементом 12, показанная на фиг. 6 в качестве примера, может быть использована в первом варианте осуществления изобретения.
В примере, показанном на фиг. 6, первый рабочий участок 11a первого элемента 11 представляет собой первую захватную часть, а второй рабочий участок 12a второго элемента 12 представляет собой вторую захватную часть. В качестве альтернативы в качестве первого рабочего участка 11a может использоваться первая лезвийная часть, а в качестве второго рабочего участка 12a может использоваться вторая лезвийная часть.
Во втором варианте осуществления изобретения могут быть использованы те же конфигурации винта 21 и подвижного блока 23, что и в первом варианте осуществления изобретения. Однако также могут быть внесены любые изменения в форму или конструкцию винта 21 и подвижного блока 23.
В примере, показанном на фиг. 6, верхний конец винта 21 с помощью крепежного элемента 22 соединен со опорным элементом 91 для стержневого элемента точно так же, как это сделано в примере, показанном на фиг. 1. Однако в то время как в примере, показанном на фиг. 1, опорный элемент 91 для стержневого элемента служит опорой для стержневого элемента P1 (первого стержневого элемента), в примере, показанном на фиг. 6, опорный элемент 91 для стержневого элемента служит опорой для стержневого элемента P9, описанного ниже (шестого стержневого элемента).
Первое звено 30 содержит первый рычажный элемент 31 и второй рычажный элемент 32. В примере, показанном на фиг. 6, нижний конец первого рычажного элемента 31 соединен с подвижным блоком 23 с возможностью поворота вокруг третьей оси AX3 (точнее, относительно стержневого элемента P3). Кроме того, верхний конец первого рычажного элемента 31 соединен с нижним концом второго рычажного элемента 32 с возможностью поворота вокруг первой соединительной оси AC1 (точнее, относительно стержневого элемента P10). Кроме того, верхний конец второго рычажного элемента 32 соединен с первым элементом 11 с возможностью поворота вокруг четвертой оси AX4 (точнее, относительно стержневого элемента P4).
Второе звено 40 содержит третий рычажный элемент 41 и четвертый рычажный элемент 42. В примере, показанном на фиг. 6, нижний конец третьего рычажного элемента 41 соединен с подвижным блоком 23 с возможностью поворота вокруг пятой оси AX5 (точнее, относительно стержневого элемента P5). Кроме того, верхний конец третьего рычажного элемента 41 соединен с нижним концом четвертого рычажного элемента 42 с возможностью поворота вокруг второй соединительной оси AC2 (точнее, относительно стержневого элемента P11). Кроме того, верхний конец четвертого рычажного элемента 42 соединен со вторым элементом 12 с возможностью поворота вокруг шестой оси AX6 (точнее, относительно стержневого элемента P6).
В описанной выше конфигурации механизма сила, действующая на подвижный блок 23, передается на первый элемент 11 через первое звено 30 (точнее, через первый рычажный элемент 31 и второй рычажный элемент 32). Аналогичным образом, сила, действующая на подвижный блок 23, передается на второй элемент 12 через второе звено 40 (точнее, через третий рычажный элемент 41 и четвертый рычажный элемент 42).
Необходимо отметить, что в примере, показанном на фиг. 6, второй рычажный элемент 32 может поворачиваться вокруг третьей соединительной оси AC3, а четвертый рычажный элемент 42 может поворачиваться вокруг третьей соединительной оси AC3. Иными словами, промежуточная часть второго рычажного элемента 32 (часть между первой соединительной осью AC1 и четвертой осью AX4) и промежуточная часть четвертого рычажного элемента 42 (часть между второй соединительной осью AC2 и шестой осью AX6) могут поворачиваться относительно стержневого элемента P9, проходящего вдоль третьей соединительной оси AC3. Кроме того, второй рычажный элемент 32 и четвертый рычажный элемент 42 пересекаются друг с другом в точке прохождения третьей соединительной оси AC3.
Ниже подробно описан процесс разрезания или захвата объекта первым рабочим участком 11a первого элемента 11 и вторым рабочим участком 12a второго элемента 12 инструмента согласно второму варианту осуществления изобретения.
На этапе, показанном на фиг. 6, винт 21 вращается в первом направлении вращения. Вращение винта 21 осуществляется, например, путем воздействия на нижний конец 21a винта 21 (точнее, путем вращения нижнего конца 21a винта 21 вокруг продольной оси AX винта 21).
Вращение винта 21 в первом направлении вращения приводит к перемещению подвижного блока 23 вдоль продольной оси AX винта 21. В примере, показанном на фиг. 6, подвижный блок 23 перемещается в первом направлении DR1.
При перемещении подвижного блока 23 в первом направлении DR1 расстояние между подвижным блоком 23 и третьей соединительной осью AC3 изменяется (точнее, расстояние между подвижным блоком 23 и третьей соединительной осью AC3 уменьшается). При уменьшении расстояния между подвижным блоком 23 и третьей соединительной осью AC3 первая соединительная ось AC1 (а также вторая соединительная ось AC2) смещается в сторону от винта 21.
Смещение первой соединительной оси AC1 в сторону от винта 21 приводит к повороту нижнего конца первого рычажного элемента 31 вокруг третьей оси AX3 и заставляет второй рычажный элемент 32 поворачиваться вокруг третьей соединительной оси AC3. Поворот второго рычажного элемента 32 вокруг третьей соединительной оси AC3 и смещение верхнего конца второго рычажного элемента 32 в сторону от продольной оси AX винта 21 приводит к повороту первого элемента 11 вокруг первой оси AX1. Таким образом, первый рабочий участок 11a первого элемента 11 перемещается ближе ко второму рабочему участку 12a.
Кроме того, смещение второй соединительной оси AC2 в сторону от винта 21 приводит к повороту нижнего конца третьего рычажного элемента 41 вокруг пятой оси AX5 и заставляет четвертый рычажный элемент 42 поворачиваться вокруг третьей соединительной оси AC3. Поворот четвертого рычажного элемента 42 вокруг третьей соединительной оси AC3 и смещение верхнего конца четвертого рычажного элемента 42 в сторону от продольной оси AX винта 21 приводит к повороту второго элемента 12 вокруг первой оси AX1. Таким образом, второй рабочий участок 12a второго элемента 12 перемещается ближе к первому рабочему участку 11a.
Когда первый рабочий участок 11a и второй рабочий участок 12a приближаются друг к другу, происходит захват или разрезание объекта первым рабочим участком 11a и вторым рабочим участком 12a.
Инструмент 1B согласно второму варианту осуществления изобретения обеспечивает некоторые преимущества по сравнению с инструментом 1A согласно первому варианту осуществления изобретения. Следует отметить, что хотя в примере, показанном на фиг. 6, каждое из звеньев (30, 40) содержит два рычажных элемента, каждое из этих звеньев может содержать три или более рычажных элемента. Кроме того, хотя в примере, показанном на фиг. 6, второй рычажный элемент 32 и четвертый рычажный элемент 42 пересекаются друг с другом, возможны также конфигурации, при которых пересекаться друг с другом будут не второй и четвертый рычажные элементы (32, 34), а другие элементы. Например, возможна конфигурация, при которой пересекаться друг с другом будут первый элемент 11 и второй элемент 12.
В примере, показанном на фиг. 6, подвижный блок 23, первый рычажный элемент 31, второй рычажный элемент 32, третий рычажный элемент 41 и четвертый рычажный элемент 42 образуют пятиугольник. Однако вышеуказанный пятиугольник может быть образован не только подвижным блоком 23, первым рычажным элементом 31, вторым рычажным элементом 32, третьим рычажным элементом 41 и четвертым рычажным элементом 42. Вышеупомянутая пятиугольная конфигурация может быть образована любыми пятью элементами из группы, в которую входят подвижный блок 23, первый элемент 11, второй элемент 12, один или несколько рычажных элементов, образующих первое звено 30, и один или несколько рычажных элементов, образующих второе звено 40.
Разумеется, настоящее изобретение не ограничивается вышеописанными частными вариантами осуществления, и любой из этих вариантов может быть изменен или модифицирован в рамках технической концепции настоящего изобретения. Кроме того, любой элемент, используемый в любом варианте осуществления изобретения, может быть использован в любом другом варианте осуществления изобретения или опущен в любом из вариантов.
Промышленная применимость
Предлагаемый настоящим изобретением инструмент обеспечивает возможность стабильной передачи усилия на рабочий участок инструмента. Таким образом, настоящее изобретение является полезным для хозяйственных организаций, использующих захватные или режущие инструменты, а также для производственных компаний, занимающихся производством захватных или режущих инструментов.
Ссылочные позиции
1, 1A, 1B инструмент;
2 механизм изменения положения;
11 первый элемент;
11a первый рабочий участок;
11b рычажный участок;
12 второй элемент;
12a второй рабочий участок;
12b рычажный участок;
13 третий элемент;
13a третий рабочий участок;
14 четвертый элемент;
14a четвертый рабочий участок;
21 винт;
21a нижний конец;
22 крепежный элемент;
23 подвижный блок;
23h резьбовое отверстие;
24a нижний упор;
24b верхний упор;
30 первое звено;
30a первый нижний конец;
30b верхний конец;
31 первый рычажный элемент;
32 второй рычажный элемент;
40 второе звено;
40a второй нижний конец;
40b верхний конец;
41 третий рычажный элемент;
42 четвертый рычажный элемент;
50 нижний элемент;
51 первая соединительная часть;
52 вторая соединительная часть;
91 опорный элемент для стержневого элемента;
92 поджимной элемент;
93 соединительный элемент;
131 первая рабочая часть;
141 вторая рабочая часть;
231 первый вырез;
232 второй вырез;
233 первое приемное отверстие;
234 второе приемное отверстие;
AC1 первая соединительная ось;
AC2 вторая соединительная ось;
AC3 третья соединительная ось;
AX продольная ось;
AX1 первая ось;
AX2 вторая ось;
AX3 третья ось;
AX4 четвертая ось;
AX5 пятая ось;
AX6 шестая ось;
P1, P3 … P11 стержневые элементы;
SP пространство.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОВОДНОЙ ЗАЖИМ И ИНСТРУМЕНТ ДЛЯ РЕЗКИ И РАЗДЕЛЕНИЯ ПРОВОДА | 2019 |
|
RU2799497C2 |
| ПРОВОДНОЙ ЗАЖИМ И ИНСТРУМЕНТ ДЛЯ РЕЗКИ И РАЗДЕЛЕНИЯ ПРОВОДА | 2019 |
|
RU2801323C2 |
| РАБОЧИЙ ИНСТРУМЕНТ ДЛЯ ПРОВОДА, КОМПОНЕНТ РАБОЧЕГО ИНСТРУМЕНТА ДЛЯ ПРОВОДА, СПОСОБ РЕЗКИ И РАЗДЕЛЕНИЯ ПРОВОДА И СПОСОБ СОЕДИНЕНИЯ ПРОВОДА | 2019 |
|
RU2803201C2 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ ДОИЛЬНОЙ УСТАНОВКИ АВТОМАТИЧЕСКОГО ДОЕНИЯ ДОЙНЫХ ЖИВОТНЫХ, ПЕРЕГОРОДКА ДОИЛЬНОЙ УСТАНОВКИ И ДОИЛЬНАЯ УСТАНОВКА | 2018 |
|
RU2753879C2 |
| ЭЛЕКТРОБРИТВА | 2010 |
|
RU2415746C1 |
| УБИРАЕМАЯ СЦЕПКА | 2005 |
|
RU2375209C2 |
| УСТРОЙСТВО НАПРАВЛЕНИЯ ШЛАНГА ДЛЯ КРАНОВОГО ИНСТРУМЕНТА | 2017 |
|
RU2723690C1 |
| Способ контроля исправности интегрированных блоков датчиков | 2017 |
|
RU2672311C1 |
| САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2651528C1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2666084C1 |
Изобретение относится к области ручных инструментов. Инструмент содержит первый элемент, выполненный с возможностью поворота вокруг первой оси и включающий в себя первый рабочий участок, предназначенный для контакта с объектом, который является объектом, подлежащим захвату или разрезанию, второй элемент, выполненный с возможностью поворота вокруг второй оси и включающий в себя второй рабочий участок, предназначенный для контакта с объектом, и механизм изменения положения, служащий для перевода первого элемента и второго элемента из открытого положения в закрытое путем поворота первого элемента вокруг первой оси и поворота второго элемента вокруг второй оси, при этом механизм изменения положения содержит винт, подвижный блок, навинченный на винт, первое звено, соединяющее подвижный блок и первый элемент друг с другом, и второе звено, соединяющее подвижный блок и второй элемент друг с другом, причем при перемещении подвижного блока в направлении вдоль продольной оси винта первый элемент и второй элемент переходят из открытого положения в закрытое положение, при этом первый элемент и второй элемент переходят из открытого положения в закрытое положение при перемещении подвижного блока в сторону первого элемента и второго элемента, при этом первое звено содержит первый нижний конец, шарнирно соединенный с подвижным блоком, причем второе звено содержит второй нижний конец, шарнирно соединенный с подвижным блоком, при этом на виде спереди первый нижний конец расположен на расстоянии от винта, и второй нижний конец расположен на расстоянии от винта. Технический результат заключается в создании инструмента, обеспечивающего стабильную передачу усилия к рабочему участку (например, режущему участку или захватному участку) инструмента. 6 з.п. ф-лы, 6 ил.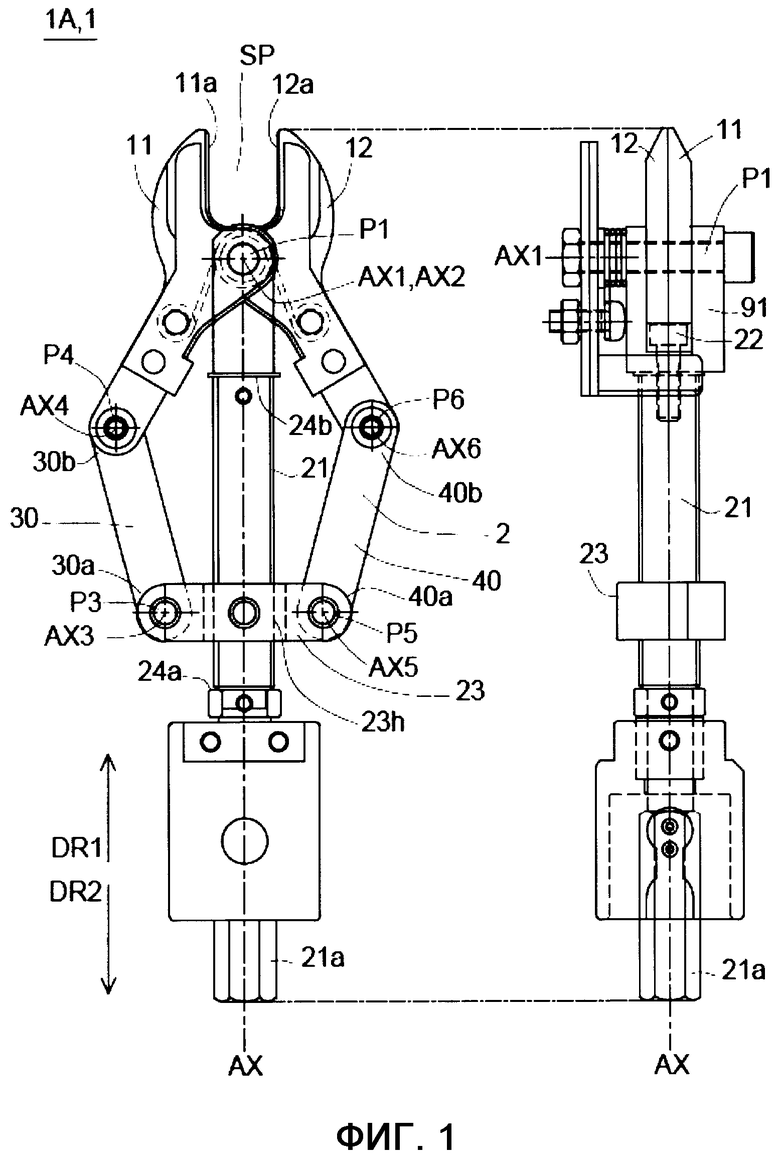
1. Инструмент, содержащий:
первый элемент, выполненный с возможностью поворота вокруг первой оси и включающий в себя первый рабочий участок, предназначенный для контакта с объектом, который является объектом, подлежащим захвату или разрезанию;
второй элемент, выполненный с возможностью поворота вокруг второй оси и включающий в себя второй рабочий участок, предназначенный для контакта с объектом; и
механизм изменения положения, служащий для перевода первого элемента и второго элемента из открытого положения в закрытое путем поворота первого элемента вокруг первой оси и поворота второго элемента вокруг второй оси;
при этом механизм изменения положения содержит:
винт;
подвижный блок, навинченный на винт;
первое звено, соединяющее подвижный блок и первый элемент друг с другом; и
второе звено, соединяющее подвижный блок и второй элемент друг с другом;
причем при перемещении подвижного блока в направлении вдоль продольной оси винта первый элемент и второй элемент переходят из открытого положения в закрытое положение,
при этом первый элемент и второй элемент переходят из открытого положения в закрытое положение при перемещении подвижного блока в сторону первого элемента и второго элемента,
при этом первое звено содержит первый нижний конец, шарнирно соединенный с подвижным блоком;
причем второе звено содержит второй нижний конец, шарнирно соединенный с подвижным блоком;
при этом на виде спереди первый нижний конец расположен на расстоянии от винта, и второй нижний конец расположен на расстоянии от винта.
2. Инструмент по п. 1, в котором первая ось и вторая ось совпадают.
3. Инструмент по п. 1 или 2, который дополнительно содержит нижний элемент, поддерживающий винт с возможностью вращения;
при этом нижний элемент содержит первую соединительную часть, выполненную с возможностью входа в зацепление с неподвижной частью удаленного рабочего инструмента;
причем нижний конец винта содержит вторую соединительную часть, выполненную с возможностью входа в зацепление с подвижной частью удаленного рабочего инструмента.
4. Инструмент по любому из пп. 1–3, который дополнительно содержит:
третий элемент, выполненный с возможностью поворота вокруг первой оси и включающий в себя третий рабочий участок, предназначенный для контакта с объектом; и
четвертый элемент, выполненный с возможностью поворота вокруг второй оси и включающий в себя четвертый рабочий участок, предназначенный для контакта с объектом.
5. Инструмент по любому из пп. 1–4, в котором первое звено соединено с подвижным блоком с возможностью поворота вокруг третьей оси;
причем первое звено соединено с первым элементом с возможностью поворота вокруг четвертой оси;
при этом второе звено соединено с подвижным блоком с возможностью поворота вокруг пятой оси; и
причем второе звено соединено со вторым элементом с возможностью поворота вокруг шестой оси.
6. Инструмент по любому из пп. 1–4, в котором первое звено содержит первый рычажный элемент и второй рычажный элемент;
причем второе звено содержит третий рычажный элемент и четвертый рычажный элемент;
при этом нижний конец первого рычажного элемента соединен с подвижным блоком с возможностью поворота вокруг третьей оси;
причем верхний конец первого рычажного элемента соединен с нижним концом второго рычажного элемента с возможностью поворота вокруг первой соединительной оси;
при этом верхний конец второго рычажного элемента соединен с первым элементом с возможностью поворота вокруг четвертой оси;
причем нижний конец третьего рычажного элемента соединен с подвижным блоком с возможностью поворота вокруг пятой оси;
при этом верхний конец третьего рычажного элемента соединен с нижним концом четвертого рычажного элемента с возможностью поворота вокруг второй соединительной оси;
причем верхний конец четвертого рычажного элемента соединен со вторым элементом с возможностью поворота вокруг шестой оси.
7. Инструмент по любому из пп. 1–6, в котором любые пять элементов из подвижного блока, первого элемента, второго элемента, одного или более рычажных элементов, образующих первое звено, и одного или более рычажных элементов, образующих второе звено, расположены в виде пятиугольника.
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Клещи для удаления гвоздей | 1984 |
|
SU1207747A1 |
| ЗАЖИМ С УСИЛЕННЫМ СЖАТИЕМ | 1996 |
|
RU2115537C1 |
| Исполнительный орган манипулятора | 1978 |
|
SU770779A1 |

