(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА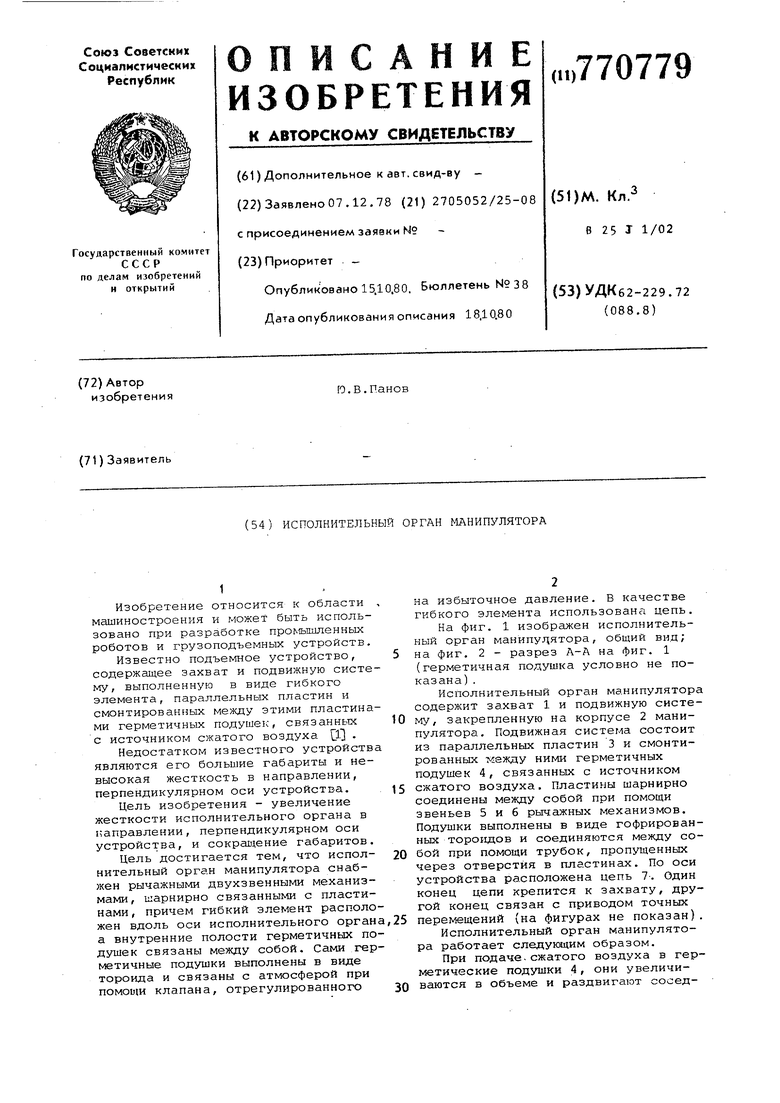
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| ГОФРИРОВАННАЯ УГЛОВАЯ ЧАСТЬ, ПРЕДНАЗНАЧЕННАЯ ДЛЯ ИЗГОТОВЛЕНИЯ ГЕРМЕТИЗИРУЮЩЕЙ МЕМБРАНЫ ДЛЯ РЕЗЕРВУАРА, И ГИБОЧНАЯ СИСТЕМА ДЛЯ ОБРАЗОВАНИЯ ГОФРА В УГЛОВОЙ ЧАСТИ | 2020 |
|
RU2813235C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521935C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333827C1 |
1
Изобретение относится к области , машиностроения и может быть использовано при разработке промышленных роботов и грузоподъемных устройств.
Известно подъемное устройство, 5 содержащее захват и подвижную систему, выполненную в виде гибкого элемента, параллельных пластин и смонтированных между этими пластинами герметичных подушек, связанньтх 10 с источником сжатого воздуха 03 .
Недостатком известного устройства являются его большие габариты и невысокая жесткость в направлении, перпендикулярном оси устройства. . 5
Цель изобретения - увеличение жесткости исполнительного органа в ;аправлении, перпендикулярном оси устройства, и сокращение габаритов.
Цель достигается тем, что испол- 20 нительный орган манипулятора снабжен рычажными двухзвенными механизмами, шарнирно связанными с пластинами, причем гибкий элемент расположен вдоль оси исполнительного органа,25 а внутренние полости герметичных подушек связаны между собой. Сами герметичные подушки выполнены в виде тороида и связаны с атмосферой при помощи клапана, отрегулированного 30
на избыточное давление. В качестве гибкого элемента использованс1 цепь.
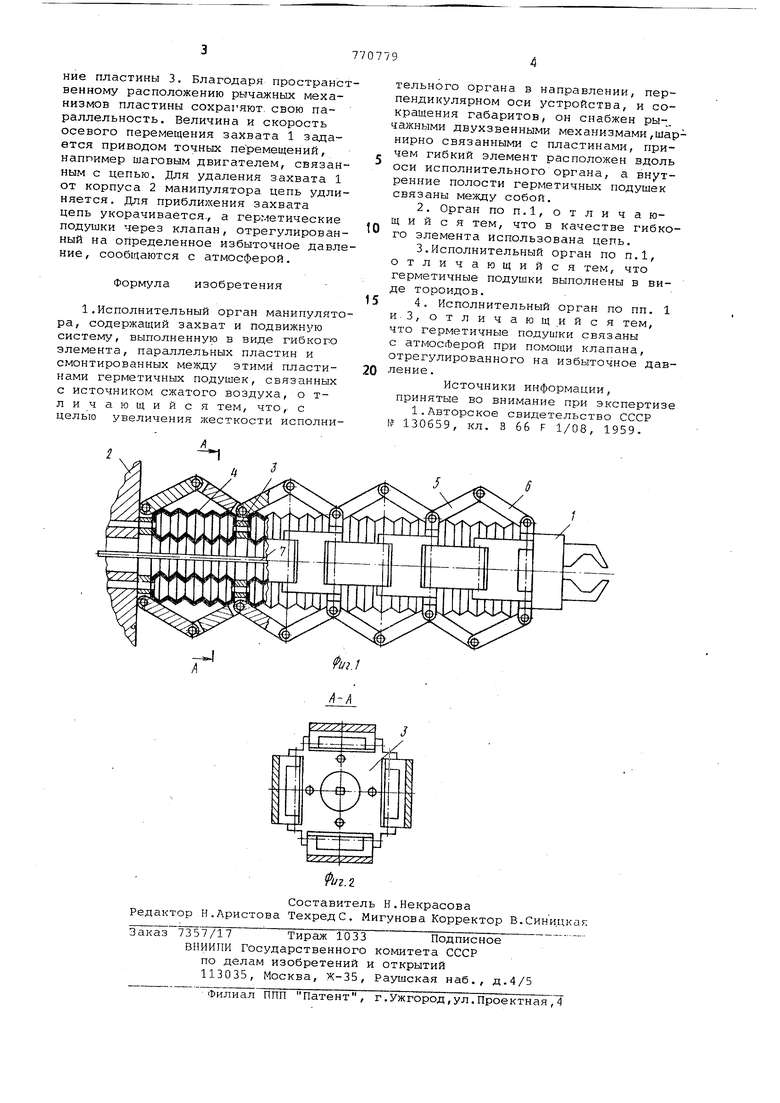
На фиг. 1 изображен исполнительный орган мaнипy ;ятopa, общий вид; на фиг. 2 - разрез А-А на фиг. 1 (герметичная подушка условно не показана) .
Исполнительный орган манипулятора содержит захват 1 и подвижную систему, закрепленную на корпусе 2 манипулятора. Подвижная система состоит из параллельных пластин 3 и смонтированных между ними герметичных подушек 4, связанных с источником сжатого воздуха. Пластины шарнирно соединены между собой при помощи звеньев 5 и б рычажных механизмов. Подушки выполнены в виде гофрированных торО1щов и соединяются между собой при помощи трубок, пропущенных через отверстия в пластинах. По оси устройства расположена цепь 7-. Один конец цепи крепится к захвату, другой конец связан с приводом точных перемещений (на фигурах не показан) .
Исполнительный орган манипулятора работает следукядим образом.
При подаче.сжатого воздуха в герметические подушки 4, они увеличиваются в объеме и раздвигают сосед
