FIELD: measuring equipment.
SUBSTANCE: used when transporting self-propelled tracked vehicles by road or rail during loading and unloading operations using a computer vision system. The parameters for loading tracked vehicles under their own power onto a vehicle are determined using a computer vision system, which includes active-type sighting targets placed along the far edge of the vehicle's cargo platform at the same distance from each other, as well as a video camera with a targeting device for sighting targets, installed on the cabin of self-propelled tracked vehicles along the axis of rotation of the tracked chassis. In this case, the computer vision system detects sighting targets using a video camera, calculates the zenith and azimuthal angles of the sighting targets, and then determines the loading parameters of self-propelled tracked vehicles from the system of equations:
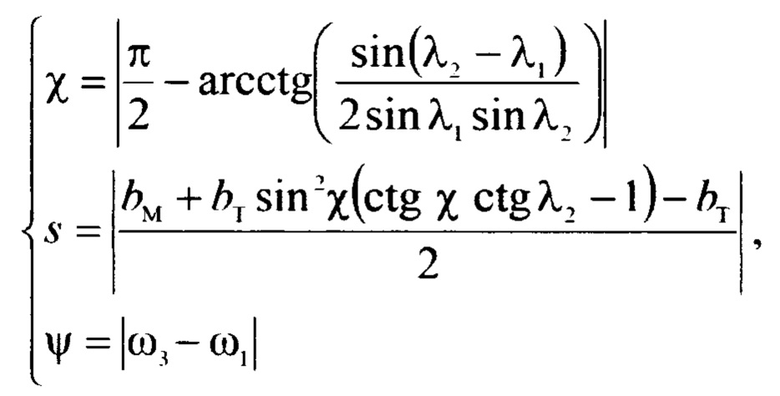
where χ is the angle between the longitudinal axes of the cargo platform and tracked vehicles;
s is the overhang of equipment tracks from the edge of the loading platform;
ψ is the roll of the cargo platform;
bV is the width of the cargo platform of the vehicle;
bM is the chassis width of transported tracked vehicles;
γ1 andγ2 are the modules of differences in azimuthal angles of sighting targets;
ω1 andω3 are the inclination angles of sighting targets.
EFFECT: increasing the safety of loading and unloading operations with self-propelled tracked vehicles and reducing the risk of damage during transportation.
1 cl, 2 dwg
| Title | Year | Author | Number |
|---|---|---|---|
| METHOD OF LOADING SELF-PROPELLED MACHINERY ONTO RAILWAY FLAT CARS AND RAIL WAY VEHICLE FOR THE METHOD | 2001 |
|
RU2229993C2 |
| RAMP FOR UNLOADING AND LOADING OF HEAVY SELF-PROPELLED EQUIPMENT FROM BOARD OF ROLLING STOCK RAILWAY PLATFORM | 2024 |
|
RU2840915C1 |
| GROUND-BASED ROBOTIC SYSTEM | 2023 |
|
RU2819223C1 |
| METHOD FOR DETERMINING PROPER COORDINATES FROM THREE SURVEYING TARGETS AND VIDEOGRAMMETRIC SYSTEM FOR IMPLEMENTATION THEREOF | 2021 |
|
RU2769637C1 |
| ROBOTIC TRANSPORT PLATFORM | 2018 |
|
RU2701592C1 |
| PORTABLE COLLAPSIBLE RAMP | 2022 |
|
RU2795426C1 |
| COMPACT ALL-SEASON UNIVERSAL CATERPILLAR CROSS-COUNTRY VEHICLE | 2013 |
|
RU2534202C2 |
| GROUND-BASED ROBOTIC COMPLEX | 2017 |
|
RU2678553C1 |
| CRAWLER TRANSPORTER | 2023 |
|
RU2798887C1 |
| RAILWAY FLAT CAR WITH LOAD SLEWING GEAR FOR COMBINATION RAIL AND ROAD CARRIAGE OF EITHER ONE SEMITRAILER OR TWO VEHICLES | 2001 |
|
RU2282547C2 |

