Предлагаемое изобретение относится к машиностроению и может быть использовано при автоматизации различных операций в микроэлектронике и прецизионной робототехнике.
Известен плоский 5R механизм [Liu X.-J., Wang J., Pritschow G. Kinematics, singularity and workspace of planar 5R symmetrical parallel mechanisms. Mechanism and Machine Theory, Vol.41(2), pp.145-169, 2006; p.148, Fig. 1]. Механизм имеет параллельную структуру и включает в свой состав стойку, на которой установлены две двухзвенные кинематические цепи, каждая из которых включает рычаг и шатун и снабжена приводом. Все шарниры механизма выполнены вращательными. Недостатком данного устройства является консольное расположение цепей, где их длина определяется размерами рычагов и шатунов. Данный недостаток устраняется в устройствах типа 3-RRR за счет наличия третьей двухзвенной кинематической цепи.
Наиболее близким к предлагаемому устройству является трехподвижный плоский 3-RRR манипулятор [Li Н., Zhang Xm., Zeng L., Huang Yj. A monocular vision system for online pose measurement of a 3RRR planar parallel manipulator. Journal of Intelligent & Robotic Systems, Vol.92, pp.3-17, 2018; p.5, Fig. 1], принимаемый в качестве прототипа. Манипулятор имеет параллельную структуру и включает в свой состав стойку (неподвижное звено) и платформу (выходное звено), между которыми установлены три двухзвенные кинематические цепи, каждая из которых включает рычаг и шатун и снабжена приводом. Все шарниры манипулятора выполнены вращательными.
Недостатком данного устройства является использование классических вращательных шарниров, в которых за счет соприкасающихся поверхностей подвижных звеньев всегда существует некоторый люфт, обусловленный погрешностью изготовления охватываемых и охватывающих поверхностей данных звеньев. Наличие люфтов во вращательных шарнирах снижает точность перемещения звеньев прототипа.
Задача, решаемая при использовании предлагаемого технического решения, заключается в повышении точности перемещения звеньев.
Данная задача решается тем, что в предлагаемом трехподвижном плоском механизме параллельной структуры, включающем стойку и платформу, между которыми установлены три двухзвенные кинематические цепи, в состав которых входят рычаги и шатуны, при этом, каждая кинематическая цепь снабжена пьезоприводом, расположенным в корпусе, торцевой крышкой, упругим элементом и штангой, при этом корпус пьезопривода сопряжен с одной стороны со стойкой, а с другой стороны с торцевой крышкой и упругим элементом посредством болтовых соединений, а соединения между торцевой крышкой и штангой, штангой и рычагом, рычагом и стойкой, рычагом и шатуном, шатуном и платформой выполнены в виде упругих шарниров.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в обеспечении механизму большей точности за счет устранения люфтов во вращательных шарнирах.
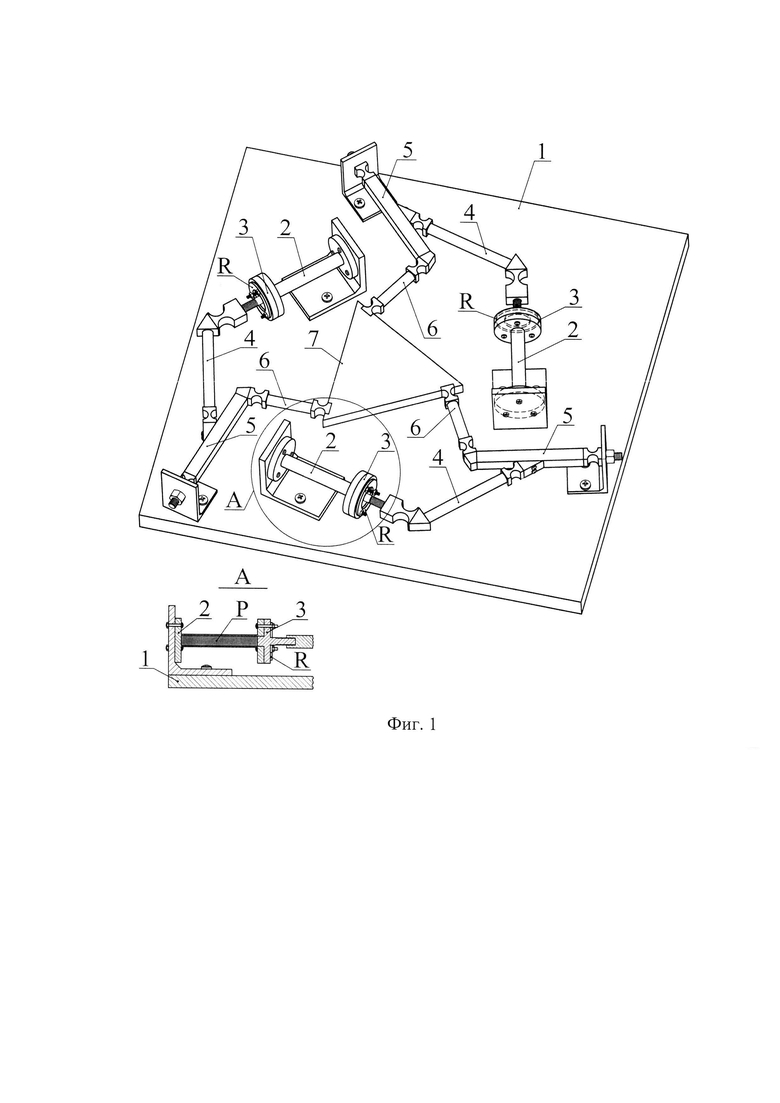
На фиг.1 показано устройство трехподвижного плоского механизма параллельной структуры. Механизм включает в свой состав стойку 1, корпусы 2 с пьезоприводами Р, торцевые крышки 3, упругие элементы R, штанги 4, рычаги 5, шатуны 6 и платформу (выходное звено) 7.
Звенья 1 и 2, а также 2, 3 и R образуют болтовые соединения. Звенья 3 и 4, 4 и 5, 5 и 1, 5 и 6, 6 и 7 образуют упругие шарниры.
Принцип работы предлагаемого механизма заключается в следующем. Торцевым крышкам 3 прикладывается давление от пьезоприводов Р, расположенных в корпусах 2. За счет наличия упругих элементов R происходит смещение между звеньями 2 и 3. Данное смещение передается на штанги 4 за счет наличия упругих шарниров между звеньями 3 и 4. Далее штанги 4 отклоняют рычаги 5 за счет наличия упругих шарниров между звеньями 4 и 5, а также 5 и 1. После чего движение передается на шатуны 6, воздействующие на платформу 7, приводя ее в движение за счет наличия упругих шарниров между звеньями 5 и 6, а также 6 и 7. Таким образом, платформе 7 обеспечиваются линейные смещения в плоскости стойки 1 и поворот относительно оси, перпендикулярной данной плоскости.
Предлагаемое изобретение может быть применено в качестве манипулятора для сверхточных устройств и операций. В частности, может быть использовано в микроэлектронике, лазерной технике, прецизионной робототехнике.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХКООРДИНАТНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2809101C1 |
| ЧЕТЫРЕХПОДВИЖНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2785706C1 |
| ТРЕХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2800734C1 |
| ОРИГАМИ МЕХАНИЗМ | 2018 |
|
RU2694704C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| ПАРАЛЛЕЛЬНЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2753217C1 |
| ПРОСТРАНСТВЕННЫЙ РЫЧАЖНЫЙ РЕГУЛИРУЕМЫЙ МЕХАНИЗМ | 2002 |
|
RU2207461C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
| ПРОСТРАНСТВЕННЫЙ ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2801186C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2800733C1 |
Изобретение относится к машиностроению и может быть использовано при автоматизации различных операций в микроэлектронике и прецизионной робототехнике. Трехподвижный плоский механизм параллельной структуры включает стойку и платформу, между которыми установлены три двухзвенные кинематические цепи, в состав которых входят рычаги и шатуны. Каждая кинематическая цепь снабжена пьезоприводом, расположенным в корпусе, торцевой крышкой, упругим элементом и штангой. При этом корпус пьезопривода сопряжен с одной стороны со стойкой, а с другой стороны с торцевой крышкой и упругим элементом посредством болтовых соединений. Соединения между торцевой крышкой и штангой, штангой и рычагом, рычагом и стойкой, рычагом и шатуном, шатуном и платформой выполнены в виде упругих шарниров. Обеспечивается точность перемещения звеньев манипулятора. 1 ил.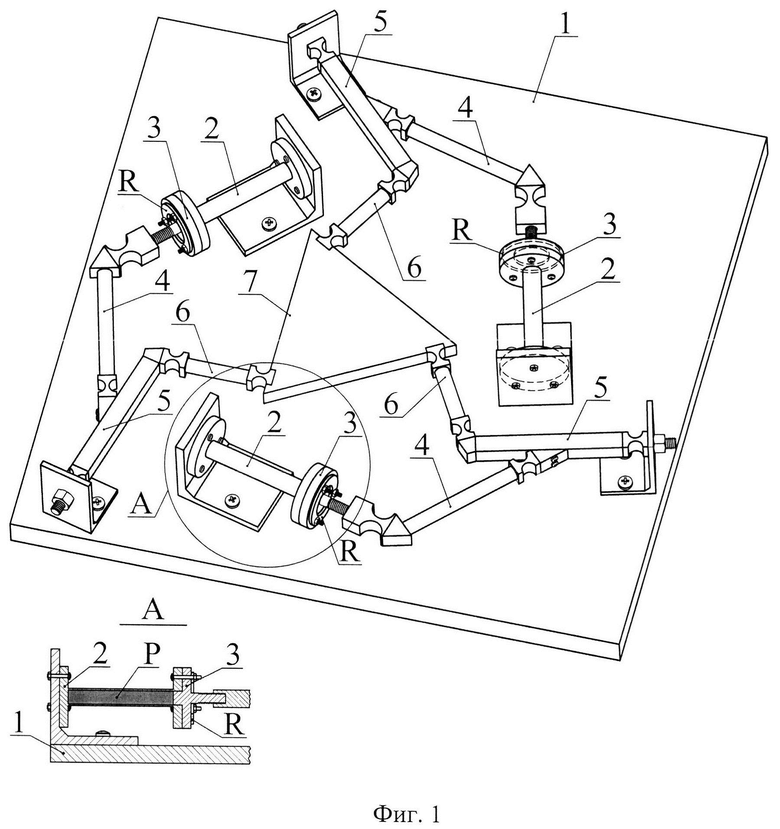
Трехподвижный плоский механизм параллельной структуры, включающий стойку и платформу, между которыми установлены три двухзвенные кинематические цепи, в состав которых входят рычаги и шатуны, отличающийся тем, что каждая кинематическая цепь снабжена пьезоприводом, расположенным в корпусе, торцевой крышкой, упругим элементом и штангой, при этом корпус пьезопривода сопряжен с одной стороны со стойкой, а с другой стороны с торцевой крышкой и упругим элементом посредством болтовых соединений, а соединения между торцевой крышкой и штангой, штангой и рычагом, рычагом и стойкой, рычагом и шатуном, шатуном и платформой выполнены в виде упругих шарниров.
| Li Н | |||
| et al | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Journal of Intelligent & Robotic Systems, Vol.92, 2018; p.5, Fig | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЧЕТЫРЕХПОДВИЖНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2785706C1 |
| ИЗМЕРИТЕЛЬНАЯ СТОЙКА | 0 |
|
SU179051A1 |
| US 20080262653 A1, 23.10.2008. | |||

