Данное техническое решение относится к машиностроению и может быть использовано при автоматизации различных операций в микроэлектронике и прецизионной робототехнике.
Известен трехкоординатный плоский 3-RRR манипулятор [Li Н., Zhang Xm., Zeng L., Huang Yj. A monocular vision system for online pose measurement of a 3RRR planar parallel manipulator. Journal of Intelligent & Robotic Systems, Vol.92, pp. 3-17, 2018; p.5, Fig. 1]. Манипулятор имеет параллельную структуру и включает в свой состав стойку (неподвижное звено) и платформу (выходное звено), между которыми установлено три двухзвенные кинематические цепи, каждая из которых включает кривошип и шатун и снабжена приводом. Все шарниры манипулятора выполнены вращательными. Недостатком данного устройства является консольное расположение каждой цепи, где длина определяется размерами кривошипа и шатуна. При увеличении размеров данных звеньев уменьшается и жесткость манипулятора в вертикальном габарите. Данный недостаток частично устранен в манипуляторах типа 3-PRR за счет замены кривошипов на ползуны, длины которых зачастую меньше длин кривошипов.
Наиболее близким к предлагаемому устройству является трехкоординатный плоский 3-PRR манипулятор [Zhang X., Mills J.K., Cleghorn W.L. Dynamic modeling and experimental validation of a 3-PRR parallel manipulator with flexible intermediate links. Journal of Intelligent & Robotic Systems, Vol.50(4), pp.323-340, 2007; p.324, Fig. 1], принимаемый в качестве прототипа. Манипулятор имеет параллельную структуру и включает в свой состав стойку (неподвижное звено) и платформу (выходное звено), между которыми установлено три двухзвенные кинематические цепи, каждая из которых включает ползун и шатун и снабжена приводом. В каждой кинематической цепи ползуны со стойкой образуют поступательные шарниры, а с шатунами вращательные, при этом шатуны и платформа сопряжены между собой вращательными шарнирами.
Недостатком данного устройства является использование классических шарниров, в которых за счет соприкасающихся поверхностей подвижных звеньев происходит трение и зачастую имеется некоторый люфт, обусловленный погрешностью изготовления охватываемых и охватывающих поверхностей данных звеньев. Трение в шарнирах снижает кпд манипулятора, а также способствует более быстрому износу контактирующих поверхностей звеньев. Люфт в шарнирах снижает точность манипулятора. Кроме этого с применением классических шарниров отсутствует возможность миниатюризации устройств по типу прототипа, что ограничивает их дальнейшее применение в некоторых технических системах, в том числе в микроэлектронике и прецизионной робототехнике.
Техническая проблема, решаемая предлагаемым изобретением, заключается в обеспечении прототипу повышенных кпд и точности.
Данная проблема решается тем, что в предлагаемом трехкоординатном плоском манипуляторе параллельной структуры, включающем стойку и платформу, между которыми установлены три кинематические цепи, в состав которых входят шатуны, при этом каждая кинематическая цепь снабжена пьезоприводом, расположенным в корпусе, который сопряжен с одной стороны со стойкой, а с другой стороны с торцевой крышкой и упругим элементом посредством болтовых соединений, кроме этого, каждая кинематическая цепь манипулятора снабжена парой упругих шарниров, один из которых жестко сопряжен между торцевой крышкой и шатуном, а второй жестко сопряжен между шатуном и платформой.
Повышение кпд и точности перемещения звеньев достигается использованием упругих шарниров и пьезоприводов в каждой кинематической цепи.
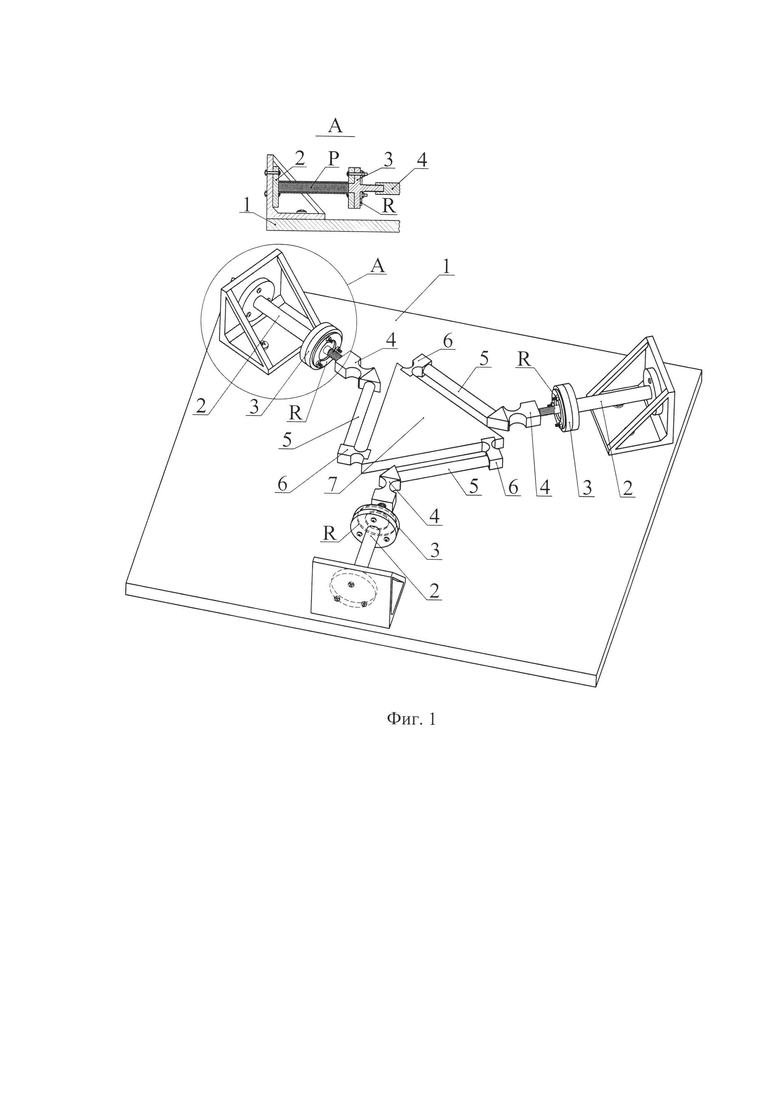
Предлагаемое устройство поясняется чертежом, где на фиг.1 показана модель трехкоординатного плоского манипулятора параллельной структуры.
Манипулятор включает в свой состав стойку (неподвижное звено) 1, корпусы 2 с пьезоприводами Р, торцевые крышки 3, упругие элементы R, первые упругие шарниры 4, шатуны 5, вторые упругие шарниры 6, платформу (выходное звено) 7.
Звенья 1 и 2, а также 2, 3 и R образуют болтовые соединения. Звенья 3 и 4, 4 и 5, 5 и 6, 6 и 7 образуют жесткие соединения (выполнены за одно целое).
Принцип работы предлагаемого манипулятора заключается в следующем. Торцевым крышкам 3 прикладывается давление от пьезоприводов Р, расположенных в корпусах 2. За счет наличия упругих элементов R происходит смещение между соответствующими звеньями. Данное смещение передается на первые упругие шарниры 4, от которых приводятся в движение шатуны 5. После чего движение передается на вторые упругие шарниры 6, воздействующие на платформу 7. Таким образом, платформе 7 обеспечиваются линейные смещения в плоскости стойки 1 и поворот относительно оси, перпендикулярной данной плоскости.
За счет более компактного расположения звеньев увеличивается жесткость конструкции. Применение упругих шарниров также обеспечивает возможность миниатюризации устройства, что расширяет возможности его дальнейшего применения том числе в микроэлектронике и прецизионной робототехнике.
Предлагаемый манипулятор может быть применен в качестве манипулятора для сверхточных устройств и операций. В частности, может быть использован в микроэлектронике, лазерной технике, прецизионной робототехнике.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХПОДВИЖНЫЙ ПЛОСКИЙ МЕХАНИЗМ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2808492C1 |
| ЧЕТЫРЕХПОДВИЖНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2785706C1 |
| ДВУХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2799609C1 |
| ТРЕХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2800734C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2800735C1 |
| ШАРНИР МАНИПУЛЯТОРА (ВАРИАНТЫ) | 2005 |
|
RU2284896C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| СТАТИЧЕСКИ СБАЛАНСИРОВАННОЕ МАНИПУЛЯЦИОННОЕ УСТРОЙСТВО ДЛЯ ЛАЗЕРНЫХ ТЕХНОЛОГИЙ | 2024 |
|
RU2829905C1 |
| МАНИПУЛЯТОР ДЛЯ СУБМИКРОННЫХ ПЕРЕМЕЩЕНИЙ | 2018 |
|
RU2679260C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2784546C1 |
Изобретение относится к машиностроению и может быть использовано при автоматизации различных операций в микроэлектронике и прецизионной робототехнике. Трехкоординатный плоский манипулятор параллельной структуры включает стойку и платформу, между которыми установлены три кинематические цепи, в состав которых входят шатуны. Каждая кинематическая цепь манипулятора снабжена пьезоприводом, расположенным в корпусе, который сопряжен с одной стороны со стойкой, а с другой стороны с торцевой крышкой и упругим элементом посредством болтовых соединений. Каждая кинематическая цепь манипулятора снабжена парой упругих шарниров, один из которых жестко сопряжен между торцевой крышкой и шатуном, а второй жестко сопряжен между шатуном и платформой. Обеспечивается повышение жесткости конструкции и точности перемещения звеньев манипулятора. 1 ил.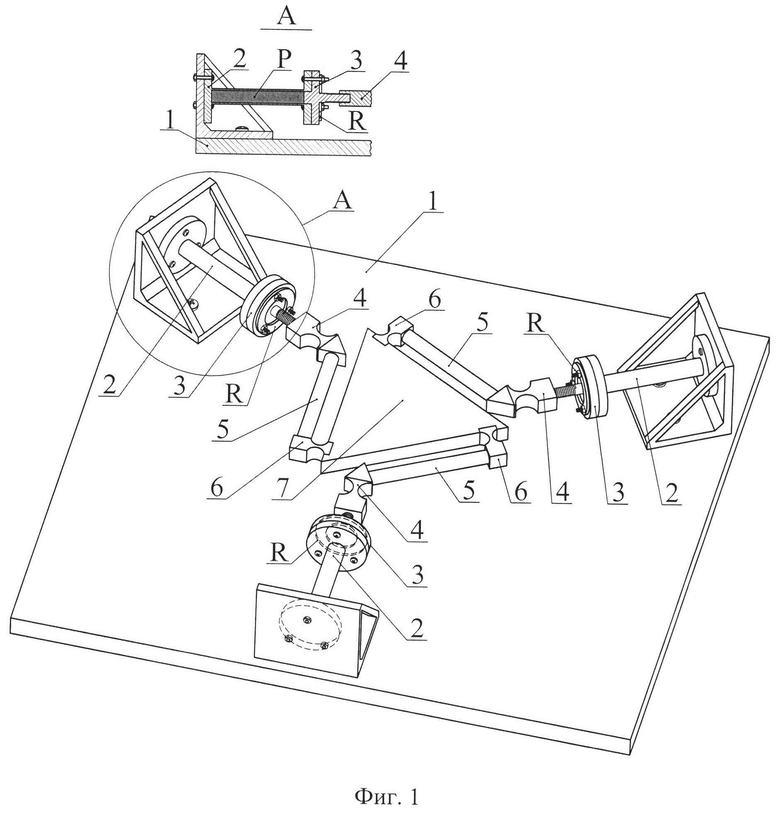
Трехкоординатный плоский манипулятор параллельной структуры, включающий стойку и платформу, между которыми установлены три кинематические цепи, в состав которых входят шатуны, отличающийся тем, что каждая кинематическая цепь снабжена пьезоприводом, расположенным в корпусе, который сопряжен с одной стороны со стойкой, а с другой стороны с торцевой крышкой и упругим элементом посредством болтовых соединений, кроме этого, каждая кинематическая цепь манипулятора снабжена парой упругих шарниров, один из которых жестко сопряжен между торцевой крышкой и шатуном, а второй жестко сопряжен между шатуном и платформой.
| Zhang X | |||
| et al | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Journal of Intelligent & Robotic Systems, Vol.50(4), 2007; p.324, Fig | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЧЕТЫРЕХПОДВИЖНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2785706C1 |
| ИЗМЕРИТЕЛЬНАЯ СТОЙКА | 0 |
|
SU179051A1 |
| US 20080262653 A1, 23.10.2008. | |||

