Изобретение относится к механическим системам, применяемым в технике для получения заданного движения выходного звена.
Известен трехподвижный плоский 3-RRR манипулятор [Li Н., Zhang Xm., Zeng L., Huang Yj. A monocular vision system for online pose measurement of a 3RRR planar parallel manipulator. Journal of Intelligent & Robotic Systems, Vol. 92, pp.3-17, 2018; стр. 5, Fig. 1], имеющий параллельную структуру. Манипулятор включает в свой состав неподвижное (стойка) и выходное (платформа) звенья, между которыми установлено три кинематических двухзвенных цепи, каждая из которых снабжена приводом. Недостатком данного устройства является наличие ряда особых (сингулярных) положений, в которых возможна потеря степеней свободы или возникновение неуправляемой подвижности выходного звена.
Наиболее близким к предлагаемому устройству является четырехподвижный плоский 4-RRR манипулятор [Xu В., Li Т., Liu X., Wu J. Workspace analysis of the 4RRR planar parallel manipulator with actuation redundancy. Tsinghua Science & Technology, Vol. 15, Iss. 5, pp. 509-516, 2010; стр. 510, Fig. 1], имеющий параллельную структуру. В данном манипуляторе к схеме 3-RRR добавлена дополнительная приводная кинематическая цепь 1-RRR, обеспечивающая прохождение особых (сингулярных) положений. Данный манипулятор принимается за прототип предлагаемого устройства. Недостаток прототипа заключается в необходимости соблюдения повышенных требований к синхронизации работы приводов в связи с наличием четвертой цепи 1-RRR при трех степенях свободы манипулятора. Расчет степеней свободы прототипа можно произвести по структурной формуле подвижности Чебышева П.Л.:
W=3n-2р5,
где W - число степеней свободы манипулятора; n - число подвижных звеньев; р5 - число одноподвижных шарниров.
Таким образом, для прототипа n=9 и p5=12, тогда W=3.
Техническая проблема, решаемая предлагаемым изобретением, заключается в усовершенствовании конструкции прототипа путем обеспечения ему дополнительной степени подвижности.
Данная проблема решается тем, что в предлагаемом четырехподвижном плоском манипуляторе параллельной структуры, включающем стойку, четыре кинематические цепи, каждая из которых состоит из ведущего рычага с установленным на нем приводом и шатуна, и платформу, сопряженные между собой вращательными шарнирами, согласно изобретению, платформа выполнена раздвижной, состоящей из левой и правой частей, сопряженных между собой поступательным шарниром.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в увеличении рабочего пространства, обеспечении дополнительной степени свободы, способствующей уменьшению нагрузок в приводах, и расширении возможностей практического применения.
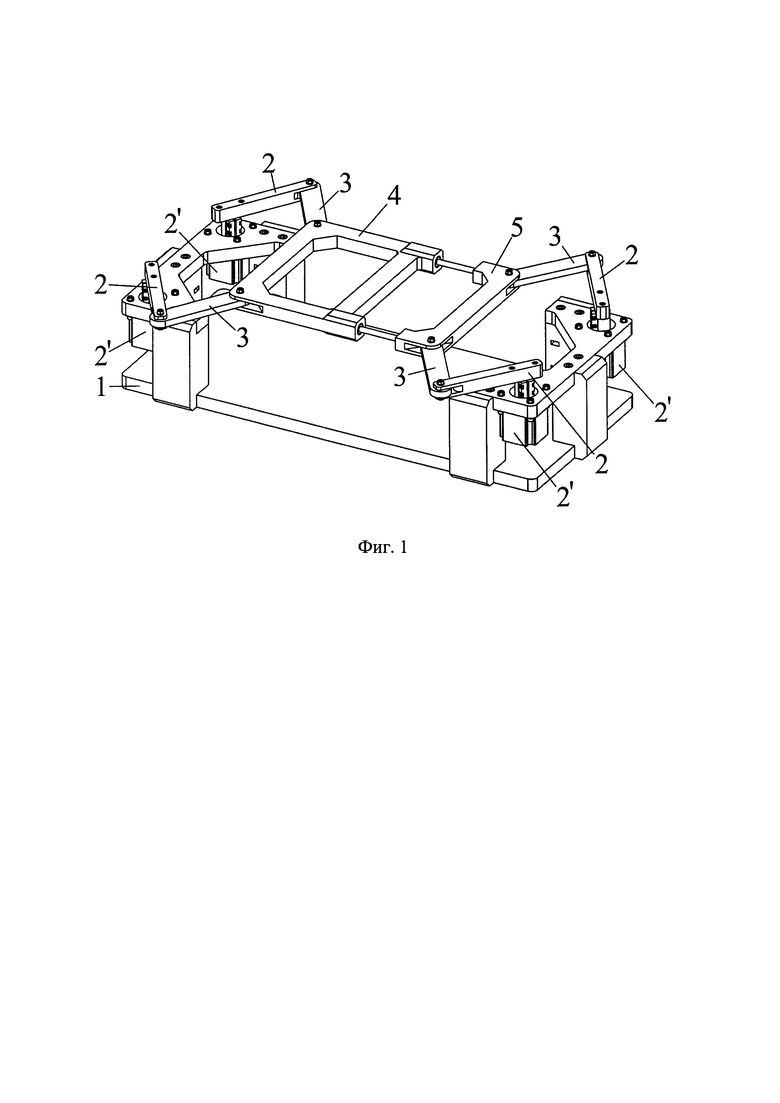
Изобретение поясняется чертежом, где на фиг. 1 показана модель четырехподвижного плоского манипулятора параллельной структуры. Манипулятор включает неподвижное звено (стойку) 1, четыре кинематических цепи, состоящие из ведущих рычагов 2 с приводами 2' и шатунов 3, сопряженных между собой вращательными шарнирами, и платформу, выполненную раздвижной, состоящей из левой 4 и правой 5 частей, сопряженных между собой поступательным шарниром. С учетом указанной выше формулы подвижности Чебышева П.Л. при параметрах заявляемого манипулятора n=10 и p5=13, число его степеней свободы оказывается равным четырем (W=4).
Принцип работы предлагаемого манипулятора заключается в следующем. При повороте ведущих рычагов 2 относительно стойки 1 движение передается на шатуны 3 и далее на платформу, которая обеспечивает частям 4 и 5 линейные смещения и поворот в горизонтальной плоскости. При этом исполнительный элемент может быть размещен либо на левой 4, либо на правой 5 частях платформы. Предлагаемое изобретение может быть применено в технологических процессах по сборке и обработке элементов деталей машин в качестве устройства для перемещения исполнительного инструмента, в качестве схвата за счет раздвижения платформы, а также иных применениях, требующих плоское движение выходного звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХПОДВИЖНЫЙ ПЛОСКИЙ МЕХАНИЗМ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2808492C1 |
| ТРЕХКООРДИНАТНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2809101C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2800733C1 |
| ПРОСТРАНСТВЕННЫЙ ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2801186C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2784546C1 |
| ТРЕХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2800734C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2800735C1 |
| ПЯТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПРИВОДНОЙ ИЗБЫТОЧНОСТЬЮ | 2023 |
|
RU2817276C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
Изобретение относится к области машиностроения, а более конкретно к плоским манипуляторам. Четырехподвижный плоский манипулятор параллельной структуры включает стойку, четыре кинематические цепи, каждая из которых состоит из ведущего рычага с установленным на нем приводом и шатуна, и платформу. Элементы сопряжены между собой вращательными шарнирами. При этом платформа выполнена раздвижной, состоящей из левой и правой частей, сопряженных между собой поступательным шарниром. Достигается уменьшение нагрузок в приводах. 1 ил.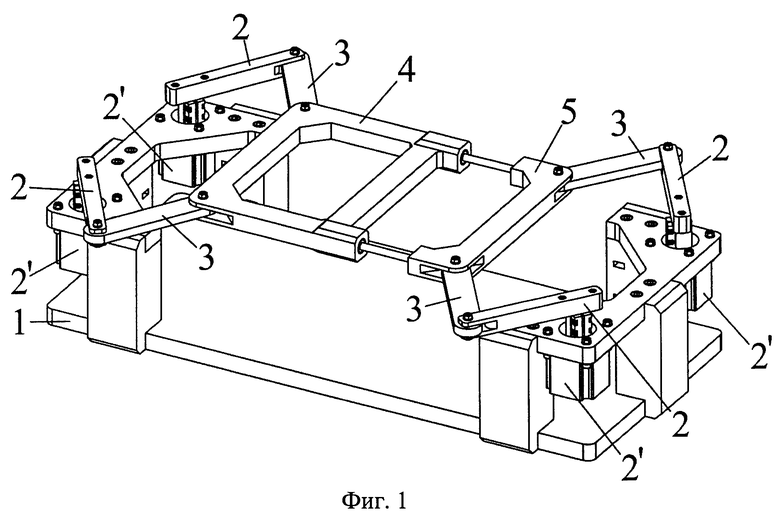
Четырехподвижный плоский манипулятор параллельной структуры, включающий стойку, четыре кинематические цепи, каждая из которых состоит из ведущего рычага с установленным на нем приводом и шатуна, и платформу, сопряженные между собой вращательными шарнирами, отличающийся тем, что платформа выполнена раздвижной, состоящей из левой и правой частей, сопряженных между собой поступательным шарниром.
| ОРИЕНТИРУЮЩАЯ ПЛАТФОРМА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2714147C1 |
| ПРИБОР ДЛЯ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ВЯЗКОСТИЖИДКОСТЕЙ | 0 |
|
SU202578A1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| US 2008262653 A1, 23.10.2008 | |||
| Прибор для наметки кернерами центров на пластинках, снабженный приспособлением для автоматического выбрасывания этих пластинок | 1926 |
|
SU5152A1 |

