Изобретение относится к механическим системам, применяемым в технике для получения заданного движения выходного звена.
Известен шестиподвижный манипулятор (платформа) Гауфа-Стюарта [Stewart D.A. Platform with six degrees of freedom. Proceedings of the Institution of Mechanical Engineers, Vol. 180, pp. 371-378, 1965], имеющий параллельную структуру. Манипулятор включает в свой состав шесть кинематических цепей, каждая из которых снабжена приводом. Недостатком данного манипулятора является относительно небольшое рабочее пространство. Данный недостаток устраняется путем установки на выходном звене дополнительной открытой кинематической цепи [Khalil W., Dombre Е. Introduction to geometric and kinematic modeling of parallel robots. Modeling, Identification and Control of Robots, pp. 171-190, 2002, Fig. 8.2], либо серийного наслоения нескольких манипуляторов друг на друга [Khalil W., Dombre Е. Introduction to geometric and kinematic modeling of parallel robots. Modeling, Identification and Control of Robots, pp. 171-190, 2002, Fig. 8.3]. В обоих случаях указанные манипуляторы имеют избыток приводов, что приводит к усложнению их управления и увеличению стоимости таких конструкций.
Наиболее близким к предлагаемому устройству является пятиподвижный механизм параллельно-последовательной структуры [Ganiev R.F., Glazunov V.A., Filippov G.S. Urgent problems of machine science and ways of solving them: wave and additive technologies, the machine tool industry, and robot surgery. Journal of Machinery Manufacture and Reliability, Vol. 47, pp. 399-406, 2018, Fig. 11].
В данном механизме на четырех кинематических цепях (из которых две цепи имеют структуру ВВВ, а две - ВПВ) установлена прямоугольная рама. Данные цепи обеспечивают раме три степени свободы, а именно, вертикальное и горизонтальное линейные смещения в плоскости цепей ВВВ и ВПВ и поворот вокруг оси, перпендикулярной данной плоскости. На раме установлена каретка с выходным звеном. Каретка имеет возможность линейного смещения вдоль рамы между цепями ВВВ и ВПВ и поворот вокруг оси, перпендикулярной направлению линейного смещения. Таким образом, выходное звено данного механизма имеет пять степеней свободы, которые контролируются шестью приводами.
Данный механизм принимается за прототип предлагаемого манипулятора. Недостаток прототипа заключается в избытке приводов, усложняющих управление данным механизмом; в наличии поступательных шарниров в приводных кинематических цепях, ограничивающих габариты рабочего пространства; в отсутствии поступательных шарниров в продольном габарите рамы, что не обеспечивает ее наклон вокруг оси, лежащей в плоскости цепей ВВВ и ВПВ (такая конструктивная особенность прототипа требует обеспечения одинаковых смещений стороны рамы с цепями ВВВ и стороны рамы с цепями ВПВ).
Техническая проблема, решаемая предлагаемым изобретением, заключается в усовершенствовании конструкции прототипа путем обеспечения равенства между числом приводов и числом степеней свободы выходного звена; в исключении поступательных шарниров в приводных кинематических цепях; в обеспечении наклона рамы вокруг оси, лежащей в плоскости цепей ВВВ и ВПВ.
Данная проблема решается тем, что в предлагаемом шестиподвижном пространственном манипуляторе параллельно-последовательной структуры, включающем стойку, на которой установлена рама посредством четырех кинематических цепей, в том числе диад с вращательными шарнирами, каретку, сопряженную с рамой посредством поступательных шарниров, и выходное звено, установленное на каретке, согласно изобретению, все четыре кинематические цепи между стойкой и рамой выполнены в виде диад с вращательными шарнирами, при этом между соседними парами диад установлены штанги, входящие с рамой во вращательные шарниры, причем рама выполнена раздвижной, а каретка сопряжена с винтом, установленным на раме и снабженным приводом, при этом выходное звено и каретка образуют между собой вращательный шарнир, ось которого перпендикулярна плоскости рамы.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в обеспечении равенства между числом приводов и числом степеней свободы выходного звена; в наличии исключительно вращательных шарниров в приводных кинематических цепях, что способствует увеличению рабочего пространства; в обеспечении дополнительного наклона рамы. Указанные преимущества способствуют расширению возможностей применения предлагаемого изобретения.
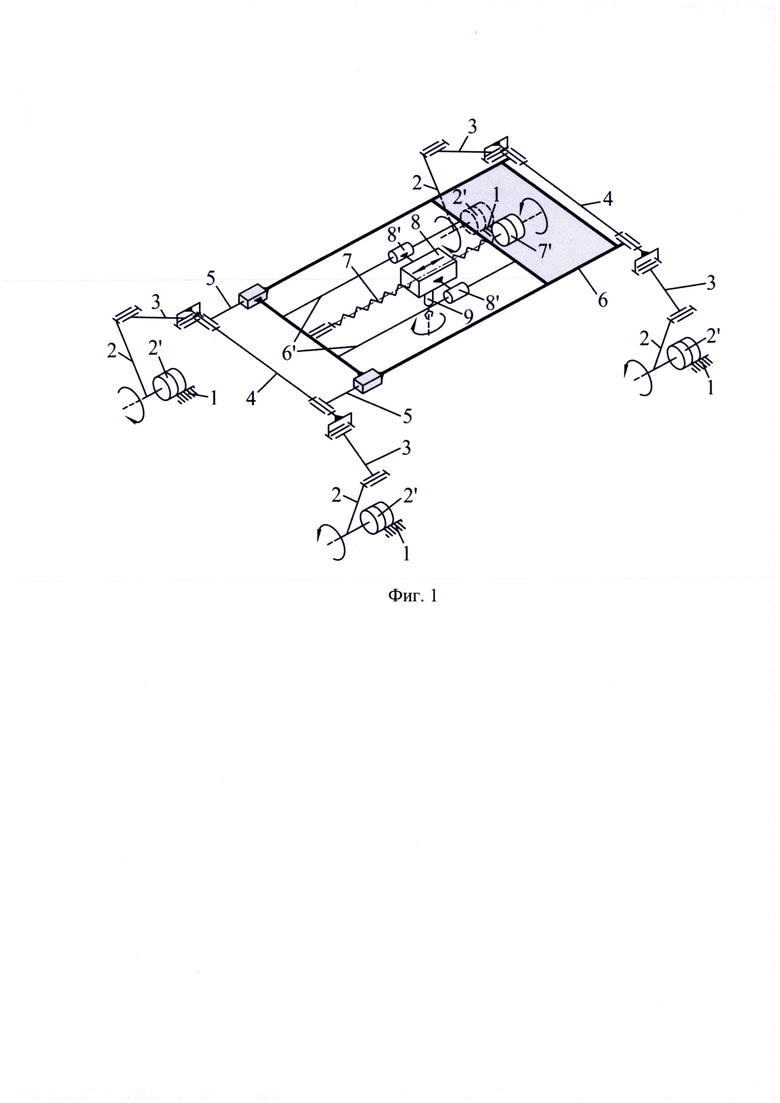
Изобретение поясняется чертежом, где на фиг. 1 показана кинематическая схема шестиподвижного пространственного манипулятора параллельно-последовательной структуры. Манипулятор включает неподвижное звено (стойку) 1, ведущие рычаги 2 с приводами 2', шатуны 3, штанги 4, звенья 5 и 6, образующие раздвижную раму, винт 7 с приводом 7', направляющие 6', жестко установленные на раме 6 и шарнирно сопряженные с элементами 8' каретку 8, выходное звено 9. Звенья 1 и 2, 2 и 3, 3 и 4, 4 и 5, 6 и 7, 8 и 9 образуют вращательные шарниры. Звенья 5 и 6, 6' и 8' образуют поступательные шарниры. Звенья 7 и 8 образуют винтовой шарнир.
Принцип работы предлагаемого манипулятора заключается в следующем. При повороте ведущих рычагов 2 движение передается на шатуны 3 и далее через штанги 4 на звенья 5 и 6, образующие раму. Рама может линейно смещаться в горизонтальном и вертикальном направлениях в плоскости кинематических цепей звеньев 2-3, а также поворачиваться вокруг осей, перпендикулярных и параллельных данной плоскости. При этом каретка 8 имеет возможность линейного смещения вдоль рамы 6. Она приводится в движение винтом 7 от привода 7'. Выходное звено 9 может поворачиваться вокруг оси, перпендикулярной плоскости рамы 6.
Предлагаемое изобретение может быть применено в технологических процессах по обработке элементов деталей машин в качестве устройства для перемещения исполнительного инструмента, в некоторых медицинских приложениях, а также применениях, требующих полный спектр степеней свободы и значительное линейное смещение в горизонтальном направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2800735C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
| ТРЕХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2800734C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОГО МАНИПУЛИРОВАНИЯ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2801187C1 |
| ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ДЛЯ ШЛИФОВКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2023 |
|
RU2799610C1 |
| ЧЕТЫРЕХПОДВИЖНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2785706C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2800733C1 |
| ПРОСТРАНСТВЕННЫЙ ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2801186C1 |
| ПЯТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПРИВОДНОЙ ИЗБЫТОЧНОСТЬЮ | 2023 |
|
RU2817276C1 |
| ТРЕХКООРДИНАТНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2809101C1 |
Изобретение относится к области машиностроения, а более конкретно, манипуляторам. Шестиподвижный пространственный манипулятор параллельно-последовательной структуры включает стойку, на которой установлена рама посредством четырех кинематических цепей, в том числе диад с вращательными шарнирами, каретку, сопряженную с рамой посредством поступательных шарниров, и выходное звено, установленное на каретке. Все четыре кинематические цепи между стойкой и рамой выполнены в виде диад с вращательными шарнирами. Между соседними парами диад установлены штанги, входящие с рамой во вращательные шарниры, причем рама выполнена раздвижной. Каретка сопряжена с винтом, установленным на раме и снабженным приводом. Выходное звено и каретка образуют между собой вращательный шарнир, ось которого перпендикулярна плоскости рамы. Достигается увеличение рабочего пространства. 1 ил.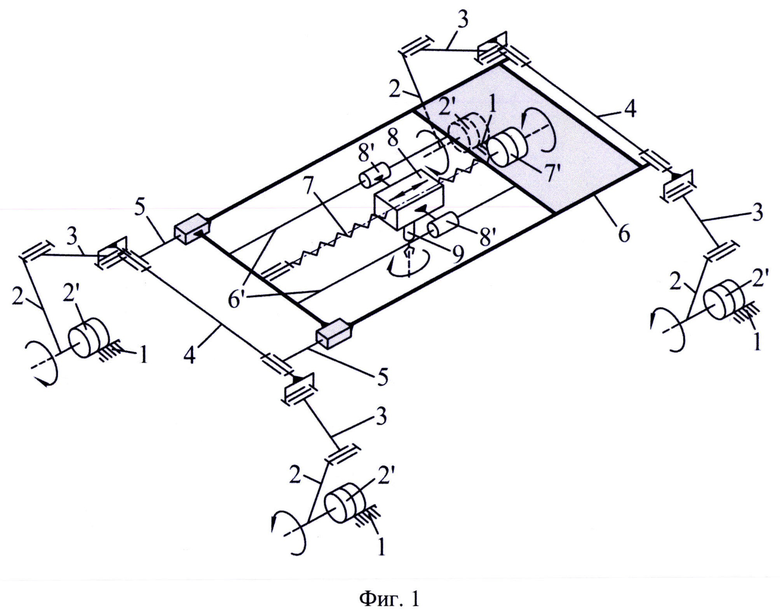
Шестиподвижный пространственный манипулятор параллельно-последовательной структуры, включающий стойку, на которой установлена рама посредством четырех кинематических цепей, в том числе диад с вращательными шарнирами, каретку, сопряженную с рамой посредством поступательных шарниров, и выходное звено, установленное на каретке, отличающийся тем, что все четыре кинематические цепи между стойкой и рамой выполнены в виде диад с вращательными шарнирами, при этом между соседними парами диад установлены штанги, входящие с рамой во вращательные шарниры, причем рама выполнена раздвижной, а каретка сопряжена с винтом, установленным на раме и снабженным приводом, при этом выходное звено и каретка образуют между собой вращательный шарнир, ось которого перпендикулярна плоскости рамы.
| ОРИЕНТИРУЮЩАЯ ПЛАТФОРМА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2714147C1 |
| 0 |
|
SU177909A1 | |
| US 2007113699 A1, 24.05.2007. | |||

