Изобретение относится к робототехнике, а именно к гибридным манипуляционным устройствам для лазерных технологий, в состав которых входит статически сбалансированный механизм манипулирования лазерной головкой.
Наиболее близким к предлагаемому устройству является манипулятор с пятью степенями свободы, имеющий параллельно-последовательную структуру [Патент РФ №182801. Опубл.: 03.09.2018, Бюл. №25].
Данный манипулятор принимается в качестве прототипа манипуляционного устройства.
В состав манипулятора с пятью степенями свободы входит основание, на котором установлены четыре идентичные кинематические цепи, каждая из которых имеет структурную схему, состоящую из двух подвижных звеньев и трех вращательных шарниров, сопряженных с подвижной платформой с помощью четырех вращательных кинематических шарниров, из подвижной платформы в виде прямоугольной рамы, на которой установлен исполнительный элемент, жестко соединенный с выходным звеном механизма и сопряженный с подвижной платформой вращательными шарнирами для совершения вращательного движения.
Недостатком прототипа является не уравновешенность от сил веса звеньев кинематических цепей, установленных между стойкой и платформой с вращательными шарнирами, а также веса подвижной платформы и выходного звена. Как известно, приведенный момент от сил веса звеньев является переменным и оказывает на двигатели не одинаковое воздействие при подъеме и при опускании масс звеньев. Данное обстоятельство снижает точность позиционирования и нагрузочную способность манипулятора.
Кроме того, при смещении подвижной платформы по направляющим рамы, исполнительный элемент манипулятора подвергается динамическим нагрузкам, которые обусловлены переменной скоростью движения подвижных масс платформы, а поступательные кинематические пары испытывают упругие деформации и прогибы, что может вызывать заклинивание при поступательных движениях.
Цель изобретения состоит в устранении указанных недостатков и повышении функциональных характеристик устройства для лазерных технологий.
Технический результат достигается созданием статически сбалансированного манипуляционного устройства для лазерных технологий, имеющее пять степеней свободы, содержащее плоский механизм параллельной структуры, в состав которого входит основание, на котором установлены четыре идентичные кинематические цепи, каждая из которых имеет структурную схему, состоящую из двух подвижных звеньев и трех вращательных шарниров, сопряженные с подвижной платформой с помощью четырех вращательных кинематических шарниров, из подвижной платформы в виде прямоугольной рамы, на которой установлен исполнительный элемент - лазерная головка, жестко соединенная с выходным звеном механизма и сопряженная с подвижной платформой вращательными шарнирами для совершения вращательного движения, при этом в состав статически сбалансированного манипуляционного устройства дополнительно входит стол для лазерного спекания частиц изделия, установленный непосредственно под лазерной головкой, управляемый приводом через шарико-винтовую пару и направляющие, а в каждой из четырех идентичных кинематических цепей одно из звеньев выполнено в виде двуплечего звена с расположенным на нем противовесом для балансировки механизма.
Статически сбалансированное манипуляционное устройство отличается от прототипа следующим.
Во-первых, статически сбалансированное манипуляционное устройство для лазерных технологий состоит из двух механизмов, а именно, из четырех подвижного манипуляционного устройства на основе трех подвижного плоского механизма параллельной структуры с наличием дополнительного вращения выходного звена вокруг оси, лежащей в плоскости механизма, и одноподвижного стола, который перемещается линейно в направлении, перпендикулярном плоскости механизма. При этом плоскостью механизма является плоскость или параллельные ей плоскости, в которых движутся подвижные звенья механизма.
Во-вторых, в четырех подвижном механизме манипуляционного устройства гравитационные силы подвижных звеньев статически уравновешены.
Таким образом, синтезирована конструкция манипуляционного устройства, которая включает плоский механизм, в состав которого входит основание, на котором установлены четыре кинематические цепи с противовесами, сопряженные с платформой с помощью четырех вращательных кинематических пар, оси которых параллельны между собой и перпендикулярны плоскости механизма. При этом платформа выполнена в виде прямоугольной рамы, имеющей три степени свободы, а именно, два линейных перемещения в плоскости механизма, и одно вращение вокруг оси, перпендикулярной этой плоскости. На прямоугольной раме установлена лазерная головка, жестко соединенная с выходным звеном механизма, которая подвижно соединена с платформой вращательными шарнирами, ось вращения выходного звена расположена в плоскости механизма. Это позволяет лазерной головке совершать вращательное движение. Таким образом, лазерная головка имеет четыре степени свободы.
В состав манипуляционного устройства входит одноподвижный механизм поступательного перемещения стола, на котором под воздействием лазерного луча происходит, например, лазерное спекание частиц металла и формируется изделие. Ось линейного перемещения стола расположена перпендикулярно плоскости механизма.
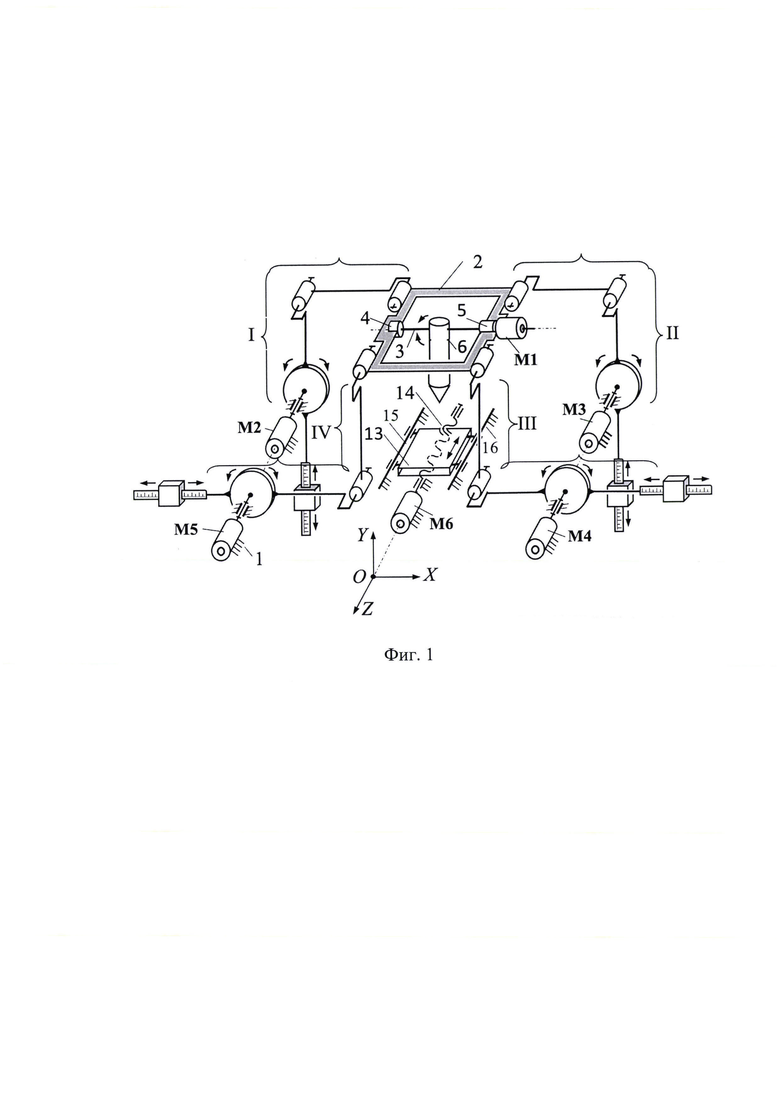
Изобретение поясняется чертежами, приведенными на фиг. 1 и 2, на которых представлены структурная схема пяти координатного манипуляционного устройства, состоящего из плоского механизма для манипулирования лазерной головкой и механизма линейного смещения стола.
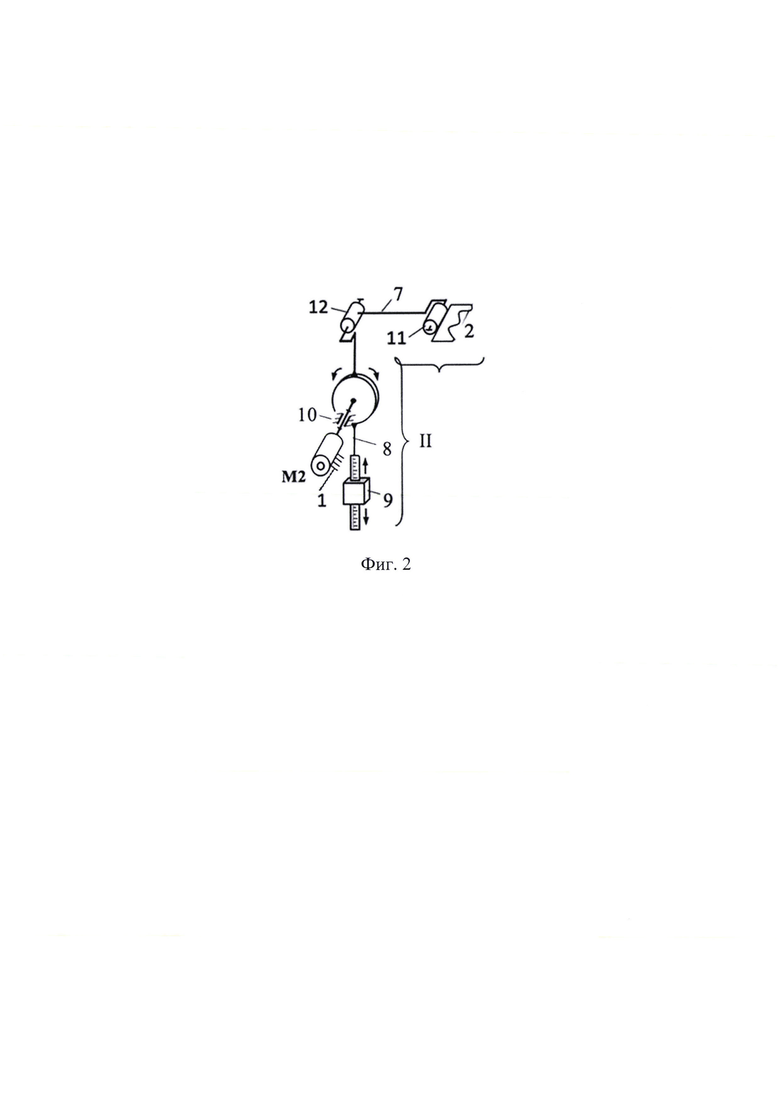
Плоский механизм для манипулирования лазерной головкой (фиг. 1), имеющий четыре степени свободы содержит: неподвижное звено -основание 1, подвижную платформу 2 в виде прямоугольной рамы вместе с выходным звеном 3, подвижно соединенное с платформой 2 с помощью двух вращательных шарниров 4 и 5 с жестко установленной на ней лазерной головкой 6, движущейся под действием привода M1, четырех идентичных плоских кинематических цепей I, II, III, IV, расположенных между основанием 1 и платформой 2. При этом цепи расположены попарно в плоскости механизма XOY. Наличие четырех кинематических цепей вызвано необходимостью симметричного расположения кинематических цепей, с целью повышения жесткости и устойчивости механизма. Кинематические цепи I, II, III, IV идентичны по структуре и поэтому ниже описана только одна из кинематических цепей. Кинематическая цепь I (II, III, IV) (фиг. 2) содержит привод М2, звенья 7 и 8 в виде стержней. Звено 8 является двуплечим и содержит закрепленный на нем противовес 9, который служит для балансировки (уравновешения) механизма манипулирования. Противовес 9 можно смещать вдоль плеча звена 8, между свободным концом и вращательным шарниром 10, с помощью которого звено 8 сопряжено с основанием 1. Настройка противовесов 9 производится для некоторой области рабочей зоны манипулятора (в окрестностях заданного положения). При этом положения уравновешивающих противовесов и массы рассчитывается заранее. Звено 7 с одной стороны сопряжено с подвижной платформой 2 с помощью вращательного шарнира 11, а с другой стороны сопряжено с двуплечим звеном 8 с помощью вращательного шарнира 12. Оси всех вращательных шарниров параллельны между собой и одновременно перпендикулярны плоскости механизма XOY. Следовательно, идентичные кинематические цепи I, II, III, IV являются плоскими цепями.
Механизм перемещения стола 13 (фиг. 1), на котором происходит лазерное спекание, содержит привод М6, шарико-винтовою пару 14 и направляющие 15 и 16.
Принцип работы предлагаемого устройства заключается в следующем.
При работе приводов М2, М3, М4, М5 вращательные движения через статически уравновешенные кинематические цепи I, II, III, IV, связывающие основание 1 и подвижную платформу 2, передается к платформе 2, обеспечивая ей три степени свободы, а именно два линейных перемещения вдоль координатных осей X и Y, а также вращение вокруг оси Z. Каждая из кинематических цепей I, II, III, IV (на фиг. 2 приведена кинематическая цепь I) состоит из звеньев 7 и 8. При этом звено 7 с одной стороны сопряжено с подвижной платформой 2 с помощью вращательного шарнира 11, а с другой стороны сопряжено с звеном 8 с помощью вращательного шарнира 12. Звено 8 является двуплечим и содержит закрепленный на нем противовес 9, который служит для балансировки (уравновешения) механизма манипулирования. Противовес 9 можно смещать вдоль плеча звена 8, между свободным концом и вращательным шарниром 10, с помощью которого звено 8 сопряжено с основанием 1.
Необходимо отметить, что любой один из приводов М2, М3, М4, М5 (фиг. 1), является избыточным, закон движения которого определяется тремя оставшимися независимыми приводами. Под действием привода M1, установленным на платформе 2, вращательное движение передается выходному звену 3, установленному на двух вращательных шарнирах 4 и 5, вместе с жестко установленной на ней лазерной головкой 6.
Следовательно, имеем трехподвижный плоский механизм параллельной структуры, который вместе механизмом вращательного движения выходного звена обеспечивает рабочему органу четыре степени свободы.
Пятая степень подвижности манипуляционного устройства обеспечивается с помощью линейного перемещения стола 13 вдоль оси Z приводом М6 через шарико-винтовую пару 14, по направляющим 15 и 16, в направлении, перпендикулярном плоскости механизма XOY.
Таким образом, манипуляционное устройство имеет пять степеней свободы: из них три поступательных смещения вдоль координатных осей X, Y, Z и два вращательных - вокруг осей X и Z.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ ГИБРИДНЫЙ РОБОТ ДЛЯ ЛАЗЕРНОЙ ТЕХНОЛОГИИ | 2023 |
|
RU2817720C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455146C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455147C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403141C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403140C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2009 |
|
RU2412798C2 |
| Промышленный робот для реализации аддитивной технологии | 2019 |
|
RU2736148C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
Изобретение относится к робототехнике, а именно к гибридным манипуляционным устройствам для лазерных технологий. Статически сбалансированное манипуляционное устройство для лазерных технологий имеет пять степеней свободы и содержит плоский механизм параллельной структуры. Плоский механизм для манипулирования лазерной головкой содержит неподвижное звено - основание 1, подвижную платформу 2 с выходным звеном 3, подвижно соединенную с платформой 2 с помощью двух вращательных шарниров 4 и 5 с жестко установленной на ней лазерной головкой 6, движущейся под действием привода M1, четырех идентичных плоских кинематических цепей I, II, III, IV, между основанием 1 и платформой 2. Каждая кинематическая цепь I, II, III, IV содержит привод М2, звенья 7 и 8 в виде стержней. Звено 8 содержит закрепленный на нем противовес 9, смещаемый вдоль плеча звена 8, между свободным концом и вращательным шарниром 10, с помощью которого звено 8 сопряжено с основанием 1. Звено 7 с одной стороны сопряжено с подвижной платформой 2 с помощью вращательного шарнира 11, а с другой стороны сопряжено с двуплечим звеном 8 с помощью вращательного шарнира 12. Механизм перемещения стола 13, на котором происходит лазерное спекание, содержит привод М6, шарико-винтовую пару 14 и направляющие 15 и 16. Обеспечивается повышение функциональных характеристик устройства для лазерных технологий. 2 ил.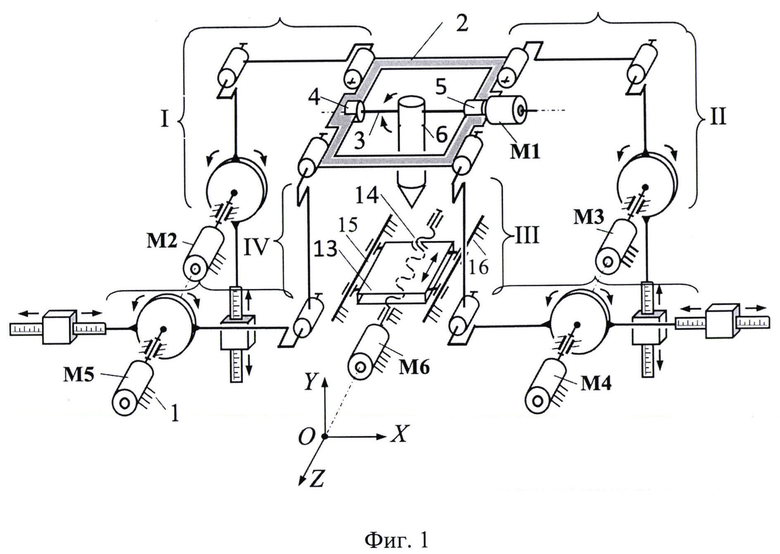
Статически сбалансированное манипуляционное устройство для лазерных технологий, имеющее пять степеней свободы, содержащее плоский механизм параллельной структуры, в состав которого входит основание, на котором установлены четыре идентичные кинематические цепи, каждая из которых имеет структурную схему, состоящую из двух подвижных звеньев и трех вращательных шарниров, сопряженных с подвижной платформой с помощью четырех вращательных кинематических шарниров, из подвижной платформы в виде прямоугольной рамы, на которой установлен исполнительный элемент - лазерная головка, жестко соединенная с выходным звеном механизма и сопряженная с подвижной платформой вращательными шарнирами для совершения вращательного движения, отличающееся тем, что в состав статически сбалансированного манипуляционного устройства входит стол для лазерного спекания частиц изделия, установленный непосредственно под лазерной головкой, управляемый приводом, через шарико-винтовую пару и направляющие, а в каждой из четырех идентичных кинематических цепей одно из звеньев выполнено в виде двуплечего звена с расположенным на нем противовесом для балансировки механизма.
| RU 182801 U1, 03.09.2018 | |||
| Видоизменение раздвижного паровозного золотника | 1929 |
|
SU19415A1 |
| US 11745425 B2, 05.09.2023 | |||
| WO 2016198291 A1, 15.12.2016. | |||

