Изобретение относится к механическим системам, применяемым в технике для получения заданного движения выходного элемента.
Известен шестиподвижный механизм (платформа) Гауфа-Стюарта [Stewart D.A. Platform with six degrees of freedom. Proceedings of the Institution of Mechanical Engineers, Vol. 180, pp. 371-378, 1965], имеющий параллельную структуру. Механизм включает в свой состав шесть кинематических цепей, каждая из которых снабжена приводом. Недостатком данного механизма является относительно небольшое рабочее пространство. Данный недостаток устраняется путем установки на выходном звене дополнительной открытой кинематической цепи [Khalil W., Dombre Е. Introduction to geometric and kinematic modeling of parallel robots. Modeling, Identification and Control of Robots, pp. 171-190, 2002, Fig. 8.2], либо серийного наслоения нескольких механизмов друг на друга [Khalil W., Dombre Е. Introduction to geometric and kinematic modeling of parallel robots. Modeling, Identification and Control of Robots, pp.171-190, 2002, Fig. 8.3]. В обоих случаях указанные механизмы имеют избыток приводов, что приводит к усложнению их управления и увеличению стоимости таких конструкций.
Наиболее близким к предлагаемому устройству является манипулятор с пятью степенями свободы [Филиппов Г.С, Глазунов В.А., Алешин А.К., Левин С.В., Рашоян Г.В., Шалюхин К.А., Скворцов С.А., Вельский А.В., Гаврюшин С.С., Григорьянц А.Г. Патент РФ №182801. Оп.: 03.09.2018, Бюл. №25], имеющий параллельно-последовательную структуру.
В данном манипуляторе на четырех плоских кинематических цепях, имеющих структуру ВВВ (т.е. включающих три вращательных шарнира) и сопряженных со стойкой, установлена рама. Данные цепи обеспечивают раме три степени свободы, а именно, вертикальное и горизонтальное линейные смещения в плоскости цепей и поворот вокруг оси, перпендикулярной данной плоскости. На раме установлена платформа с выходным звеном, на котором жестко установлен выходной элемент. Платформа имеет возможность линейного смещения вдоль рамы между цепями ВВВ, а выходное звено с выходным элементом имеет возможность поворота вокруг оси, перпендикулярной направлению линейного смещения платформы. Таким образом, выходному звену с выходным элементом обеспечиваются пять степеней свободы.
Данный манипулятор принимается за прототип предлагаемого механизма. Недостаток прототипа заключается в наличии кинематических цепей с вращательными шарнирами, установленных между стойкой и рамой, что снижает нагрузочные способности и жесткость манипулятора. Кроме того, наличие данных цепей способствует возникновению особых положений (когда манипулятор теряет степени свободы или, наоборот, становится неуправляемым). Это происходит, когда в данных цепях оси вращательных шарниров лежат на одной перпендикулярной им прямой. Также в манипуляторе отсутствует шестая степень свободы, обеспечивающая вращение выходного элемента.
Техническая проблема, решаемая предлагаемым изобретением, заключается в усовершенствовании конструкции прототипа путем введения поступательных шарниров в кинематических цепях, расположенных между стойкой и рамой, а также в обеспечении механизму шестой степени свободы, учитывающей вращение выходного элемента.
Данная проблема решается тем, что в предлагаемом шестиподвижном пространственном механизме параллельно-последовательной структуры, включающем стойку, на которой установлены четыре кинематические цепи, сопряженные посредством вращательных шарниров с рамой, внутри которой при помощи поступательных шарниров установлена платформа, а также установлено выходное звено, сопряженное с выходным элементом, согласно изобретению, на стойке жестко установлена станина с вертикальными направляющими, образующими поступательные шарниры с ползунами, причем ползуны попарно жестко сопряжены между собой поперечинами, образующими с шатунами и рамой вращательные шарниры, при этом между платформой и выходным звеном установлена каретка, образующая с платформой поступательные шарниры, а с выходным звеном вращательные шарниры, причем выходное звено образует с выходным элементом вращательный шарнир.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в увеличении нагрузочных способностей и жесткости механизма, исключению некоторых особых положений, наличии шестой степени свободы, обеспечивающей вращение выходного элемента.
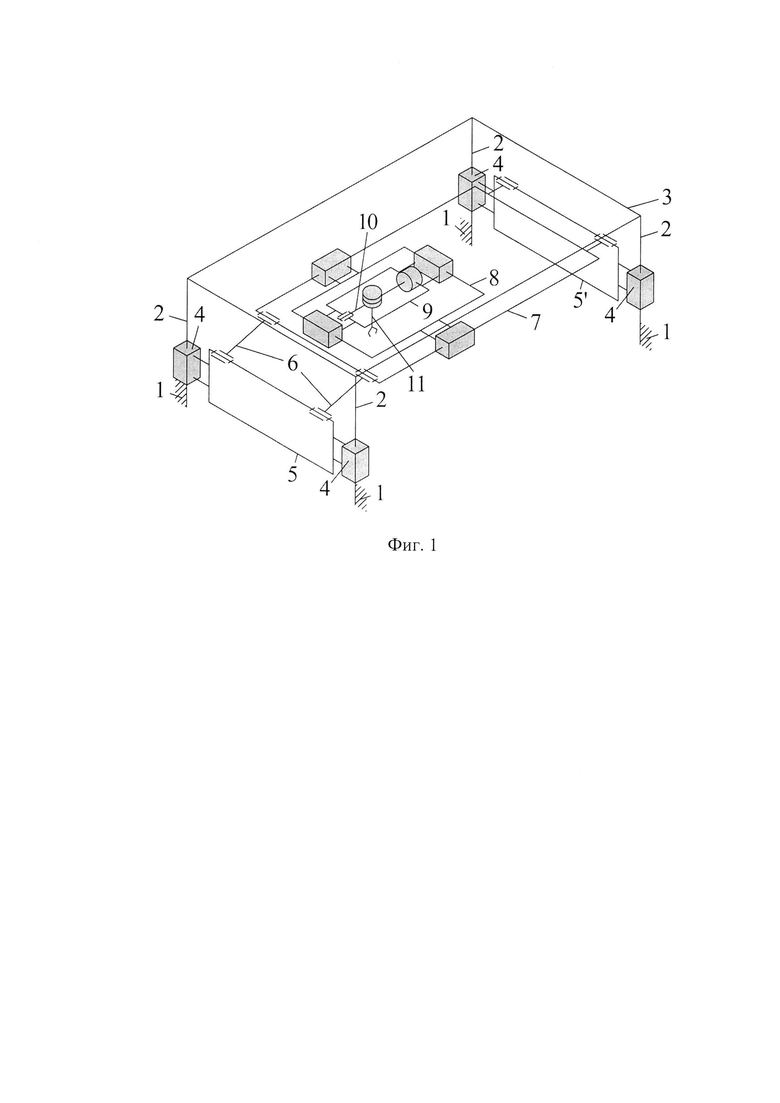
Изобретение поясняется чертежом, где на фиг. 1 показана кинематическая схема шестиподвижного пространственного механизма параллельно-последовательной структуры. Механизм включает неподвижное звено (стойку) 1, вертикальные направляющие 2 станины 3, ползуны 4, поперечины 5 и 5', шатуны 6, раму 7, платформу 8, каретку 9, выходное звено 10 и выходной элемент 11. Звенья 1 и 2, 2 и 3, 4 и 5, 4 и 5' образуют жесткие соединения (выполнены за одно целое). Звенья 2 и 4, 7 и 8, 8 и 9 образуют поступательные шарниры. Звенья 5 и 6, 5' и 7, 6 и 7, 9 и 10, 10 и 11 образуют вращательные шарниры.
Принцип работы предлагаемого механизма заключается в следующем. При смещении ползунов 4 относительно вертикальных направляющих 2 станины 3, жестко установленной на стойке 1, движение передается через поперечину 5 на шатуны 6 и через поперечину 5' на раму 7. Рама 7 может линейно смещаться в вертикальном направлении и поворачиваться вокруг оси, параллельной осям вращательных шарниров 5-6, 6-7 и 5'-7. При этом платформа 8 имеет возможность линейного смещения вдоль рамы 7, а каретка 9 имеет возможность линейного смещения вдоль платформы 8. Выходное звено 10 может поворачиваться вокруг оси, перпендикулярной осям шарниров 8-9. Выходной элемент 11 имеет возможность поворота вокруг своей продольной оси.
Предлагаемое изобретение может быть применено в технологических процессах по обработке элементов деталей машин в качестве устройства для перемещения исполнительного инструмента, в некоторых медицинских приложениях, а также применениях, требующих полный спектр степеней свободы и увеличенное линейное смещение в горизонтальном и вертикальном направлениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2784546C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
| ТРЕХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2800734C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| ТРЕХКООРДИНАТНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2809101C1 |
| ПЯТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПРИВОДНОЙ ИЗБЫТОЧНОСТЬЮ | 2023 |
|
RU2817276C1 |
| ПРОСТРАНСТВЕННЫЙ ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2801186C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2800733C1 |
| ДВУХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2799609C1 |
| ЧЕТЫРЕХПОДВИЖНЫЙ ПЛОСКИЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2785706C1 |
Изобретение относится области машиностроения, а более конкретно к механизмам получения заданного движения выходного элемента. Шестиподвижный пространственный механизм параллельно-последовательной структуры включает стойку, на которой установлены четыре кинематические цепи. Цепи сопряжены посредством вращательных шарниров с рамой, внутри которой при помощи поступательных шарниров установлена платформа. Установлено выходное звено, сопряженное с выходным элементом. На стойке жестко установлена станина с вертикальными направляющими, образующими поступательные шарниры с ползунами, причем ползуны попарно жестко сопряжены между собой поперечинами, образующими с шатунами и рамой вращательные шарниры. Между платформой и выходным звеном установлена каретка, образующая с платформой поступательные шарниры, а с выходным звеном вращательные шарниры. Выходное звено образует с выходным элементом вращательный шарнир. Достигается увеличение нагрузочных способностей. 1 ил.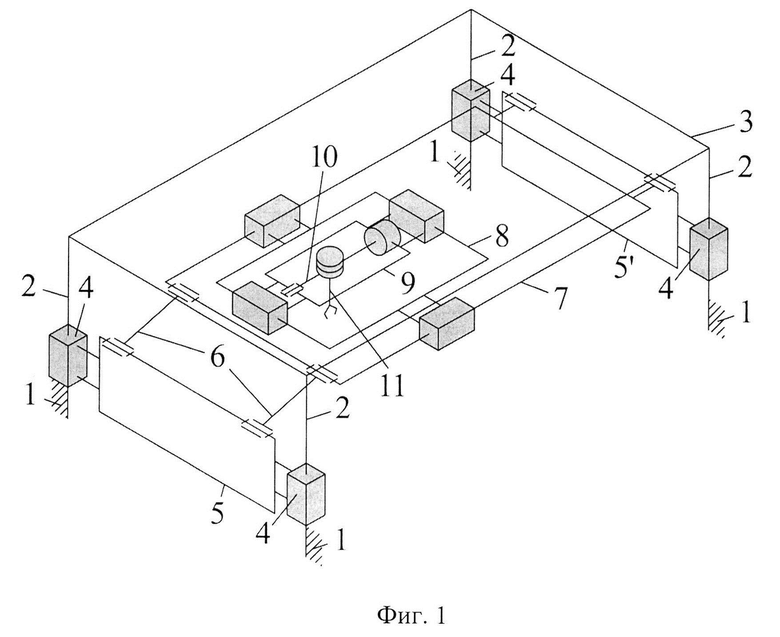
Шестиподвижный пространственный механизм параллельно-последовательной структуры, включающий стойку, на которой установлены четыре кинематические цепи, сопряженные посредством вращательных шарниров с рамой, внутри которой при помощи поступательных шарниров установлена платформа, а также установлено выходное звено, сопряженное с выходным элементом, отличающийся тем, что на стойке жестко установлена станина с вертикальными направляющими, образующими поступательные шарниры с ползунами, причем ползуны попарно жестко сопряжены между собой поперечинами, образующими с шатунами и рамой вращательные шарниры, при этом между платформой и выходным звеном установлена каретка, образующая с платформой поступательные шарниры, а с выходным звеном вращательные шарниры, причем выходное звено образует с выходным элементом вращательный шарнир.
| RU 182801 U1, 03.09.2018 | |||
| Выпрямительное устройство | 1929 |
|
SU20222A1 |
| US 2007113699 A1, 24.05.2007 | |||
| ОРИЕНТИРУЮЩАЯ ПЛАТФОРМА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2714147C1 |
| 0 |
|
SU202579A1 | |

