ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка заявляет приоритет заявки №202010996386.1 на патент Китая, поданной в CNIPA 21 сентября 2020 г., под названием «Locomotive Braking System for Automatic Driving and Achieving Method thereof», содержание которой полностью включено в данный документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области техники торможения локомотива, в частности к системе торможения локомотива c автоматическим приведением в действие и способу автоматического приведения в действие.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Система торможения электрического локомотива является важной частью всего локомотива и имеет большое значение для обеспечения безопасной эксплуатации электрического локомотива.
В настоящее время в известном уровне техники система торможения электрического локомотива обычно содержит компоненты, такие как тормозной контроллер, блок управления тормозом и экран отображения тормоза, при этом тормозной контроллер используется в качестве компонента ввода для уровня торможения, оператор вручную управляет тормозным контроллером для изменения уровня торможения согласно рабочему состоянию локомотива, кроме того, блок управления тормозом анализирует уровень торможения и управляет тормозным цилиндром для приложения усилия торможения, соответствующего уровню торможения, и тем временем результат отображается на экране отображения тормоза для выдачи и отображения для передачи обратно оператору для образования замкнутого контура управления. Из-за того, что оператору необходимо наблюдать за рабочим состоянием локомотива в режиме реального времени, вышеупомянутая система торможения электрического локомотива требует больших затрат рабочей силы, и на окончательный эффект управления, связанный с торможением локомотива, значительно влияют искусственные субъективные факторы оператора. Чтобы эффективно снизить интенсивность труда оператора, снизить затраты рабочей силы, более научным и разумным образом применять усилие торможения и достичь эффектов энергосбережения и снижения выбросов, в первоначальную электрическую систему торможения добавляется функция автоматического приведения в действие в виде программного обеспечения.
Однако вновь добавляемая функция автоматического приведения в действие часто предполагает значительное изменение программного обеспечения первоначальной электрической системы торможения и является сложной с точки зрения сцепления для управления, и обновление программного обеспечения несовместимо с добавлением соответствующего аппаратного обеспечения первоначальной электрической системы торможения, что влечет за собой повышенные риски реализации и значительно снижает реализуемость, надежность и стабильность автоматического приведения в действие в системе торможения электрического локомотива.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Чтобы решить технические проблемы известного уровня техники, заключающиеся в том, что система торможения локомотива с функцией автоматического приведения в действие является сложной с точки зрения сцепления для управления и обладает низкой надежностью, в настоящей заявке предлагаются система торможения локомотива c автоматическим приведением в действие и способ автоматического приведения в действие, конкретные решения которых описаны ниже.
В настоящей заявке предлагаются система торможения локомотива c автоматическим приведением в действие, содержащая модуль связи, а также модуль автоматического приведения в действие, тормозной контроллер, модуль управления тормоза и модуль отображения тормоза, которые соединяются посредством модуля связи;
модуль отображения тормоза выполнен с возможностью выдачи информации о состоянии системы торможения;
тормозной контроллер выполнен с возможностью выдачи информации об уровне торможения, относящейся к усилию торможения, согласно информации о состоянии;
модуль автоматического приведения в действие соединен с центром управления автоматическим приведением в действие посредством модуля связи и выполнен с возможностью выполнения обмена информацией в виде данных с центром управления автоматическим приведением в действие, обнаружения информации в виде данных, выдаваемой модулем управления тормоза, и выдачи сигнала об операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра; и
модуль управления тормоза выполнен с возможностью анализа информации об уровне торможения, относящейся к усилию торможения, получения второго целевого значения давления тормозного цилиндра, выдачи фактического целевого значения давления тормозного цилиндра согласно сигналу об операции автоматического приведения в действие и первому целевому значению давления, управления работой тормозного цилиндра и отправки информации о состоянии системы торможения на модуль отображения тормоза.
В некоторых вариантах осуществления модуль автоматического приведения в действие содержит автомат состояний, выполненный с возможностью выполнения обмена информацией в виде данных с центром управления автоматическим приведением в действие, обнаружения информации в виде данных, выдаваемой модулем управления тормоза, управления переключением системы торможения между разными состояниями согласно информации в виде данных и выдачи сигнала об операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра согласно результату переключения.
В некоторых вариантах осуществления информация в виде данных, обмен которой выполняется между модулем автоматического приведения в действие и центром управления автоматическим приведением в действие локомотива, включает, помимо прочего, информацию о команде управления автоматическим приведением в действие и информацию о команде управления активным выходом.
В некоторых вариантах осуществления информация в виде данных, обнаруживаемая модулем автоматического приведения в действие и выдаваемая модулем управления тормоза, включает, помимо прочего, информацию о неисправности связи, информацию о неисправности аппаратного обеспечения, информацию о том, что рукоятка автоматического тормоза и отдельная рукоятка тормоза в тормозном контроллере возвращаются в рабочее положение после выхода из рабочего положения, и информацию о том, что рукоятка автоматического тормоза в тормозном контроллере возвращается в рабочее положение после установки в положение блокировки, а отдельная рукоятка тормоза в тормозном контроллере возвращается в рабочее положение после выхода из рабочего положения.
В некоторых вариантах осуществления сигнал об операции автоматического приведения в действие включает сигнал о начале операции автоматического приведения в действие и сигнал о выходе из операции автоматического приведения в действие.
В некоторых вариантах осуществления модуль управления тормоза дополнительно выполнен таким образом, что
он принимает большее значение из первого целевого значения давления и второго целевого значения давления в качестве фактического целевого значения давления, если модуль автоматического приведения в действие выдает сигнал о начале операции автоматического приведения в действие; и
он принимает второе целевое значение давления в качестве фактического целевого значения давления, если модуль автоматического приведения в действие выдает сигнал о выходе из операции автоматического приведения в действие.
В настоящей заявке дополнительно предлагается способ автоматического приведения в действие, в котором используется система торможения локомотива, упомянутая в любом из вышеупомянутых технических решений. Способ автоматического приведения в действие включает следующие этапы:
S1: выдача информации о состоянии системы торможения модулем отображения тормоза;
S2: выдача тормозным контроллером информации об уровне торможения, относящейся к усилию торможения, согласно информации о состоянии;
S3: выполнение обмена информацией в виде данных с центром управления автоматическим приведением в действие локомотива, обнаружение информации в виде данных, выдаваемой модулем управления тормоза, и выдача сигнала об операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра модулем автоматического приведения в действие; и
S4: анализ информации об уровне торможения, относящейся к усилию торможения, получение второго целевого значения давления тормозного цилиндра, выдача фактического целевого значения давления тормозного цилиндра согласно сигналу об операции автоматического приведения в действие и первому целевому значению давления, управление работой тормозного цилиндра и отправка информации о состоянии системы торможения на модуль отображения тормоза модулем управления тормоза.
В некоторых вариантах осуществления этап S3, в частности, включает:
S31: выполнение автоматом состояний модуля автоматического приведения в действие обмена информацией в виде данных с центром управления автоматическим приведением в действие и обнаружение информации в виде данных, выдаваемой модулем управления тормоза;
S32: управление переключением системы торможения между разными состояниями согласно информации в виде данных на этапе S31; и
S33: выдачу сигнала об операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра согласно результату переключения на этапе S32.
В некоторых вариантах осуществления разные состояния системы торможения на этапе S32, в частности, включают:
состояние ожидания, состояние исполнения, состояние активного выхода и состояние нештатного выхода.
В некоторых вариантах осуществления сигнал об операции автоматического приведения в действие на этапе S33 включает сигнал о начале операции автоматического приведения в действие и сигнал о выходе из операции автоматического приведения в действие.
В некоторых вариантах осуществления этап S32, в частности, включает:
S321: когда система торможения находится в состоянии ожидания, если обнаружена информация о команде управления автоматическим приведением в действие от центра управления автоматическим приведением в действие, переключение системы торможения в состояние исполнения и выдачу сигнала о начале операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра;
S322: когда система торможения находится в состоянии исполнения, если обнаружена информация о команде управления активным выходом от центра управления автоматическим приведением в действие, переключение системы торможения в состояние активного выхода; и, если обнаружена информация о неисправности связи или информация о неисправности аппаратного обеспечения, выдаваемая модулем управления тормоза, переключение системы торможения в состояние нештатного выхода;
S323: когда система торможения находится в состоянии активного выхода, если обнаружена информация, выдаваемая модулем управления тормоза, о том, что рукоятка автоматического тормоза и отдельная рукоятка тормоза в тормозном контроллере возвращаются в рабочее положение после выхода из рабочего положения, переключение системы торможения в состояние ожидания и выдачу сигнала о выходе из операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра; и
S324: когда система торможения находится в состоянии нештатного выхода, если обнаружена информация, выдаваемая модулем управления тормоза, о том, что рукоятка автоматического тормоза в тормозном контроллере возвращается в рабочее положение после установки в положение блокировки и отдельная рукоятка тормоза в тормозном контроллере возвращается в рабочее положение после выхода из рабочего положения, переключение системы торможения в состояние ожидания и выдачу сигнала о выходе из операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра.
В некоторых вариантах осуществления этап S4, в частности, включает:
S41: анализ информации об уровне торможения, относящейся к усилию торможения, и получение второго целевого значения давления тормозного цилиндра модулем управления тормоза;
S42: сравнение первого целевого значения давления и второго целевого значения давления согласно сигналу об операции автоматического приведения в действие;
S43: если сигнал об операции автоматического приведения в действие представляет собой сигнал о начале, принятие большего значения из первого целевого значения давления и второго целевого значения давления в качестве фактического целевого значения давления; и, если сигналом об операции автоматического приведения в действие является сигнал о выходе, принятие второго целевого значения давления в качестве фактического целевого значения давления; и
S44: управление работой тормозного цилиндра согласно фактическому целевому значению давления и отправку информации о состоянии системы торможения на модуль отображения тормоза модулем управления тормоза.
Настоящая заявка характеризуется следующими техническими эффектами или преимуществами.
(1) В настоящей заявке предлагается система торможения локомотива c автоматическим приведением в действие, содержащая модуль связи, а также модуль автоматического приведения в действие, тормозной контроллер, модуль управления тормоза и модуль отображения тормоза, которые соединяются посредством модуля связи. В настоящей заявке вновь добавляемая функция автоматического приведения в действие заключена в оболочку с использованием модульного способа, который не оказывает дополнительного влияния на нормальную работу первоначальной системы торможения. Система торможения локомотива обладает высокими свойствами разъединения, совместима с первоначальной системой торможения, аппаратное обеспечение которой не модернизировалось, обладает высокой адаптивностью, и улучшены реализуемость, надежность и стабильность автоматического приведения в действие в системе торможения. Кроме того, в настоящей заявке дополнительно предлагается способ достижения автоматического приведения в действие в системе торможения локомотива, который также характеризуется упомянутыми выше эффектами.
(2) В настоящей заявке предлагается система торможения локомотива c автоматическим приведением в действие, в которой модуль автоматического приведения в действие содержит автомат состояний. Благодаря использованию автомата состояний достигается полное функциональное логическое управление для автоматического приведения в действие, режимы состояния являются простыми и понятными в переключении, и достигаются высокая надежность и стабильность. Кроме того, в настоящей заявке дополнительно предлагается способ достижения автоматического приведения в действие в системе торможения локомотива, который также характеризуется упомянутыми выше эффектами.
(3) В настоящей заявке предлагается система торможения локомотива c автоматическим приведением в действие, в которой улучшен уровень автоматизма системы торможения локомотива, снижена интенсивность труда оператора на локомотиве, снижены затраты рабочей силы, и усилие торможения применяется более научным и разумным образом. Кроме того, в настоящей заявке дополнительно предлагается способ достижения автоматического приведения в действие в системе торможения локомотива, который также характеризуется упомянутыми выше эффектами.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Прилагаемые графические материалы, служащие частью настоящей заявки, предоставлены для дополнительного понимания настоящей заявки. Иллюстративные варианты осуществления настоящей заявки и их описания предназначены для пояснения настоящей заявки, а не для того, чтобы представлять собой ненадлежащие ограничения настоящей заявки.
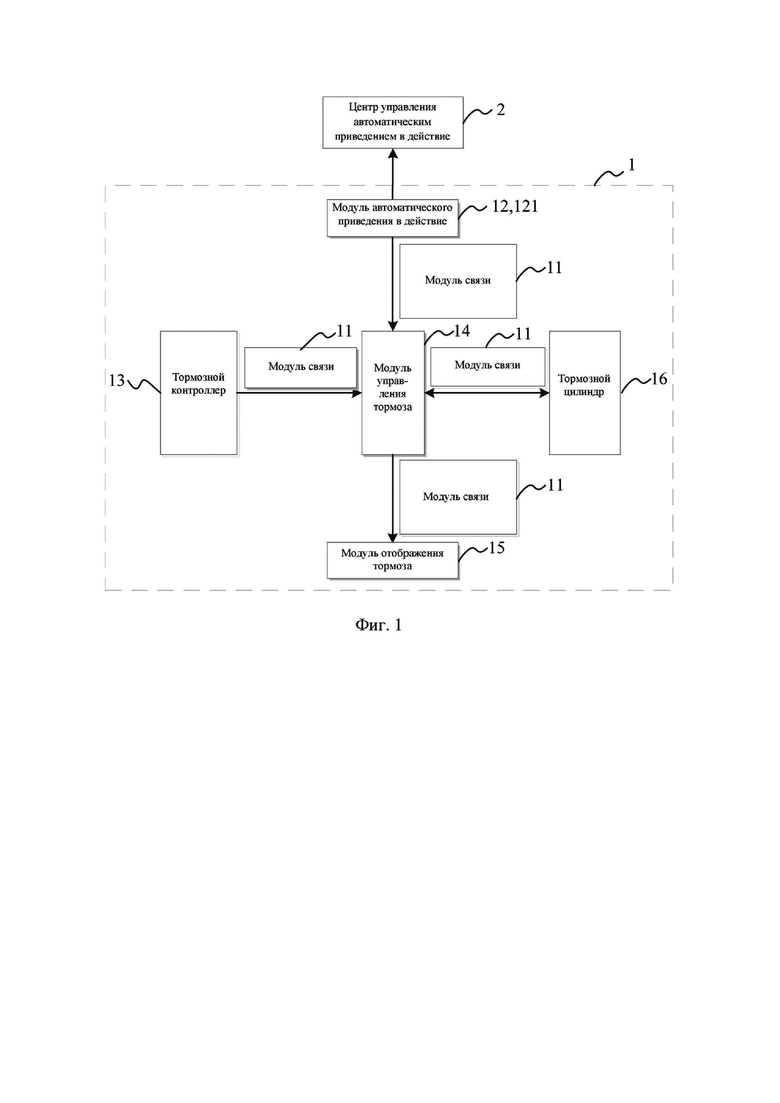
На фиг. 1 представлена схематическая структурная схема системы торможения локомотива c автоматическим приведением в действие, предусмотренная в варианте осуществления настоящей заявки;
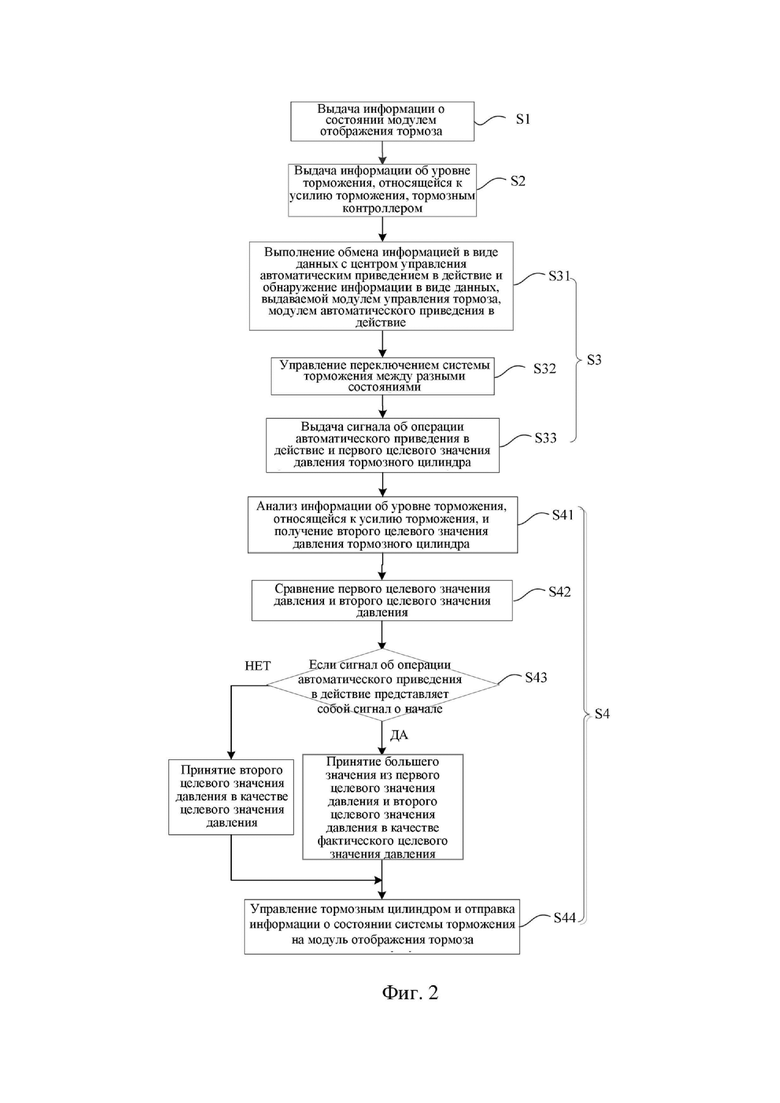
на фиг. 2 представлена первая технологическая схема способа автоматического приведения в действие, предусмотренная в варианте осуществления настоящей заявки;
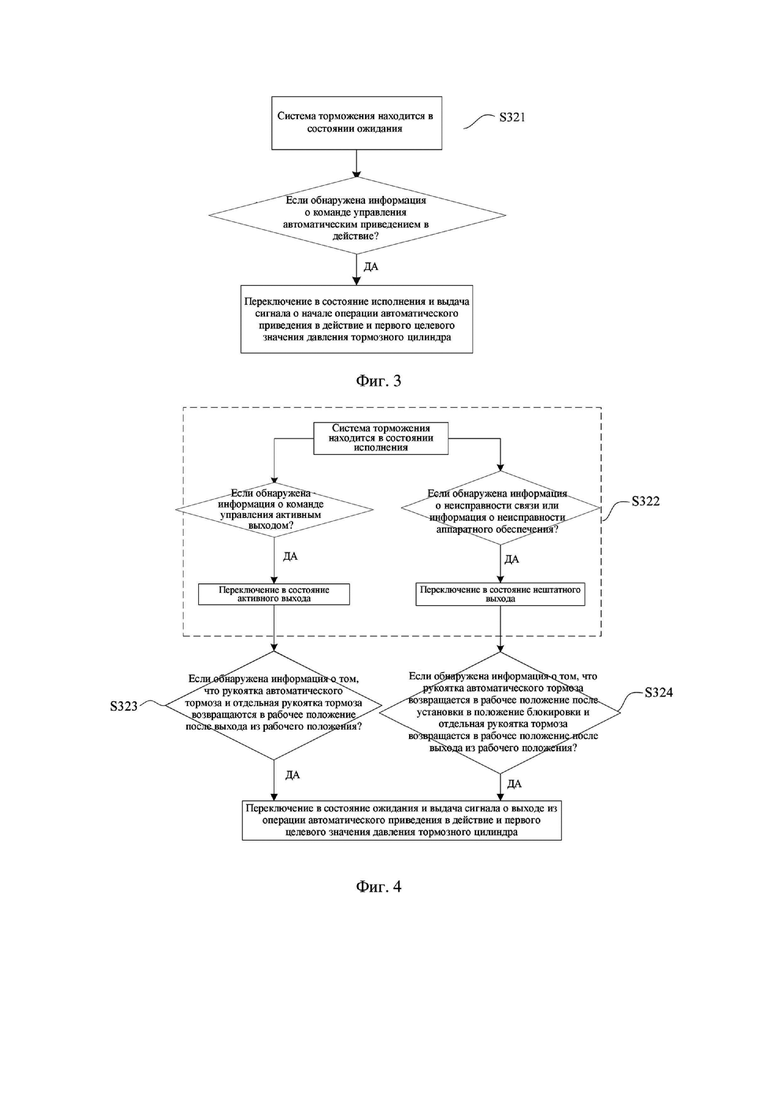
на фиг. 3 представлена вторая технологическая схема способа автоматического приведения в действие, предусмотренная в варианте осуществления настоящей заявки; и
на фиг. 4 представлена третья технологическая схема способа автоматического приведения в действие, предусмотренная в варианте осуществления настоящей заявки.
На графических материалах:
1 - система торможения локомотива; 11 - модуль связи; 12 - модуль автоматического приведения в действие; 13 - тормозной контроллер; 14 - модуль управления тормоза; 15 - модуль отображения тормоза; 16 - тормозной цилиндр; и 2 - центр управления автоматическим приведением в действие.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Технические решения в вариантах осуществления будут ясно и полностью описаны ниже со ссылкой на прилагаемые графические материалы в вариантах осуществления настоящего изобретения. Очевидно, что описанные варианты осуществления являются лишь частью вариантов осуществления настоящего изобретения, а не всеми вариантами осуществления. Исходя из вариантов осуществления настоящего изобретения, все другие варианты осуществления, полученные специалистами в данной области техники без творческих усилий, входят в объем правовой охраны настоящего изобретения.
Следует понимать, что в реализации может быть показан конкретный порядок этапов способа, но не требуется или не подразумевается, что эти операции должны выполняться в этом конкретном порядке, если это специально не указано или если взаимосвязь между этапами не определяет порядок выполнения. Такие варианты будут зависеть от выбора. Дополнительно или альтернативно определенные этапы могут быть опущены, множество этапов могут быть объединены в один этап, подлежащий выполнению, и/или один этап может быть разбит на множество этапов. Все такие варианты входят в объем настоящего изобретения.
Термины «первый» и «второй» используются только в описательных целях, и их не следует понимать как указывающие или подразумевающие относительную важность или неявно указывающие количество указанных технических признаков. Следовательно, признаки, определенные как «первый» и «второй», могут явно или неявно включать один или более признаков.
Технические решения в соответствии с настоящей заявкой будут описаны подробно ниже со ссылкой на конкретные варианты осуществления и прилагаемые графические материалы описания.
В настоящем варианте осуществления предлагается система торможения локомотива c автоматическим приведением в действие, содержащая модуль связи, а также модуль автоматического приведения в действие, тормозной контроллер, модуль управления тормоза и модуль отображения тормоза, которые соединяются посредством модуля связи;
модуль отображения тормоза выполнен с возможностью выдачи информации о состоянии системы торможения;
тормозной контроллер выполнен с возможностью выдачи информации об уровне торможения, относящейся к усилию торможения, согласно информации о состоянии;
модуль автоматического приведения в действие соединен с центром управления автоматическим приведением в действие посредством модуля связи и выполнен с возможностью выполнения обмена информацией в виде данных с центром управления автоматическим приведением в действие, обнаружения информации в виде данных, выдаваемой модулем управления тормоза, и выдачи сигнала об операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра; и
модуль управления тормоза выполнен с возможностью анализа информации об уровне торможения, относящейся к усилию торможения, получения второго целевого значения давления тормозного цилиндра, выдачи фактического целевого значения давления тормозного цилиндра согласно сигналу об операции автоматического приведения в действие и первому целевому значению давления, управления работой тормозного цилиндра и отправки собранной информации о состоянии системы торможения на модуль отображения тормоза.
Согласно вышеупомянутой системе торможения локомотива c автоматическим приведением в действие, предоставленной в настоящем варианте осуществления, вновь добавляемая функция автоматического приведения в действие заключена в оболочку с использованием модульного способа, который не оказывает дополнительного влияния на нормальную работу первоначальной системы торможения. Система торможения локомотива обладает высокими свойствами разъединения, совместима с первоначальной системой торможения, аппаратное обеспечение которой не модернизировалось, обладает высокой адаптивностью, и улучшены реализуемость, надежность и стабильность автоматического приведения в действие в системе торможения.
В частности, со ссылкой на фиг. 1, в варианте осуществления настоящей заявки предлагается система 1 торможения локомотива для достижения автоматического приведения в действие, содержащая модуль 11 связи, а также модуль 12 автоматического приведения в действие, тормозной контроллер 13, модуль 14 управления тормоза и модуль 15 отображения тормоза, которые соединяются посредством модуля 11 связи.
Модуль 11 связи используется для связи между всеми модулями или блоками системы 1 торможения локомотива и связи между системой 1 торможения локомотива и центром 2 управления автоматическим приведением в действие. В варианте осуществления настоящей заявки модуль 11 связи содержит, помимо прочего, шину CAN (локальная сеть контроллеров), MVB (многофункциональная транспортная шина), шину RS485, Ethernet и жесткий кабель.
Модуль 15 отображения тормоза выполнен с возможностью выдачи информации о состоянии системы 1 торможения. В варианте осуществления настоящей заявки модуль 15 отображения тормоза представляет собой компонент системы торможения, предназначенный для взаимодействия человека с компьютером, и может представлять собой LCD (жидкокристаллический дисплей). Информация о состоянии системы 1 торможения может представлять собой информацию о состоянии всех модулей и блоков системы 1 торможения, информацию о рабочем состоянии локомотива, информацию о состоянии тормозного цилиндра 16 и т. д. и используется для обеспечения обратной связи для тормозного контроллера 13 для выдачи информации об уровне торможения, относящейся к усилию торможения, для образования замкнутого контура управления.
Тормозной контроллер 13 выполнен с возможностью выдачи информации об уровне торможения, относящейся к усилию торможения. В варианте осуществления настоящей заявки тормозной контроллер 13 является компонентом ввода для уровня торможения. Машинист локомотива изменяет уровень торможения в тормозном контроллере 13 согласно фактическим эксплуатационным требованиям локомотива и информации о состоянии модуля 15 отображения тормоза, и информация об уровне торможения, относящаяся к усилию торможения, выдается согласно положению рукоятки тормоза в тормозном контроллере 13. Тормозной контроллер 13 имеет множество уровней торможения, и усилие торможения постепенно увеличивается с повышением уровня торможения. В варианте осуществления настоящей заявки тормозной контроллер 13 содержит семь уровней торможения.
Модуль 12 автоматического приведения в действие выполнен с возможностью выдачи сигнала об операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра 16. В одном варианте осуществления настоящей заявки модуль 12 автоматического приведения в действие также соединен с центром 2 управления автоматическим приведением в действие посредством модуля 11 связи, и модуль 12 автоматического приведения в действие может выполнять обмен информацией в виде данных с центром 2 управления автоматическим приведением в действие и обнаруживать информацию в виде данных, выдаваемую модулем 14 управления тормоза, при этом информация в виде данных, обмен которой выполняется с центром 2 управления автоматическим приведением в действие, включает, помимо прочего, информацию о команде управления автоматическим приведением в действие и информацию о команде управления активным выходом. Обнаруженная информация в виде данных, выдаваемая модулем 14 управления тормоза, включает, помимо прочего, информацию о неисправности связи, информацию о неисправности аппаратного обеспечения, информацию о том, что рукоятка автоматического тормоза и отдельная рукоятка тормоза в тормозном контроллере 13 возвращаются в рабочее положение после выхода из рабочего положения, и информацию о том, что рукоятка автоматического тормоза в тормозном контроллере 13 возвращается в рабочее положение после установки в положение блокировки, а отдельная рукоятка тормоза в тормозном контроллере 13 возвращается в рабочее положение после выхода из рабочего положения. Согласно вышеупомянутой информации в виде данных модуль 12 автоматического приведения в действие выдает сигнал об операции автоматического приведения в действие и первое целевое значение давления тормозного цилиндра. Сигнал об операции автоматического приведения в действие включает сигнал о начале операции автоматического приведения в действие и сигнал о выходе из операции автоматического приведения в действие.
В одном варианте осуществления настоящей заявки, в частности, модуль 12 автоматического приведения в действие содержит автомат 121 состояний, и автомат 121 состояний выполнен с возможностью выполнения обмена информацией в виде данных с центром 2 управления автоматическим приведением в действие, обнаружения информации в виде данных, выдаваемой модулем 14 управления тормоза, управления переключением системы 1 торможения между разными состояниями согласно информации в виде данных и выдачи сигнала об операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра согласно результату переключения. Разные состояния системы 1 торможения включают состояние ожидания, состояние исполнения, состояние активного выхода и состояние нештатного выхода. Когда система 1 торможения находится в состоянии ожидания, если обнаружена информация о команде управления автоматическим приведением в действие от центра 2 управления автоматическим приведением в действие, система 1 торможения переключается в состояние исполнения, и выдаются сигнал о начале операции автоматического приведения в действие и первое целевое значение давления тормозного цилиндра; когда система 1 торможения находится в состоянии исполнения, если обнаружена информация о команде управления активным выходом от центра 2 управления автоматическим приведением в действие, система 1 торможения переключается в состояние активного выхода; и, если обнаружена информация о неисправности связи или информация о неисправности аппаратного обеспечения, выдаваемая модулем 14 управления тормоза, система 1 торможения переключается в состояние нештатного выхода; когда система 1 торможения находится в состоянии активного выхода, если модулем 14 управления тормоза выдается информация о том, что рукоятка автоматического тормоза и отдельная рукоятка тормоза в тормозном контроллере 13 возвращаются в рабочее положение после выхода из рабочего положения, система 1 торможения переключается в состояние ожидания, и выдаются сигнал о выходе из операции автоматического приведения в действие и первое целевое значение давления тормозного цилиндра; и, когда система 1 торможения находится в состоянии нештатного выхода, если модулем 14 управления тормоза выдается информация о том, что рукоятка автоматического тормоза в тормозном контроллере 13 возвращается в рабочее положение после установки в положение блокировки и отдельная рукоятка тормоза в тормозном контроллере 13 возвращается в рабочее положение после выхода из рабочего положения, система 1 торможения переключается в состояние ожидания и выдаются сигнал о выходе из операции автоматического приведения в действие и первое целевое значение давления тормозного цилиндра.
Следует отметить, что в вышеупомянутом варианте осуществления первое целевое значение давления тормозного цилиндра рассчитывается центром 2 управления автоматическим приведением в действие и выдается модулем автоматического приведения в действие в системе торможения. Центр управления автоматическим приведением в действие выдает оптимальную кривую скорости, принимая интеллектуальный алгоритм оптимального управления путем интегрирования постоянной информации, такой как характеристики локомотива, данные о линии и расписание движения поездов, а также информации в реальном времени, такой как сигнал локомотива и временное ограничение скорости, а затем выполняет общее управление системой тяги локомотива и системой торможения в сочетании с текущей скоростью и выдает первое целевое значение давления тормозного цилиндра в модуль автоматического приведения в действие в системе торможения. В одном варианте осуществления настоящей заявки центр управления автоматическим приведением в действие может быть реализован посредством существующей системы, описанной следующим образом: система STO от Beijing Siwei Xinke Information Technology Co., Ltd., интеллектуальная система управления локомотивом от CRRC Dalian Locomotive Research Institute Co., Ltd. и т.д. Центр управления автоматическим приведением в действие не входит в объем системы торможения в настоящей заявке, и вышеупомянутая цель может быть достигнута путем использования известного уровня техники, и поэтому настоящая заявка не будет подробно описана.
Согласно вышеупомянутой системе 1 торможения локомотива для достижения автоматического приведения в действие, предусмотренного в варианте осуществления настоящей заявки, благодаря использованию автомата 121 состояний достигается полное функциональное логическое управление c автоматическим приведением в действие, режимы состояния являются простыми в переключении и понятными, и достигаются высокая надежность и стабильность.
Модуль 14 управления тормоза выполнен с возможностью управления работой тормозного цилиндра 16. В одном варианте осуществления настоящей заявки модуль 14 управления тормоза выполнен с возможностью анализа информации об уровне торможения, относящейся к усилию торможения, получения второго целевого значения давления тормозного цилиндра, выдачи фактического целевого значения давления тормозного цилиндра согласно сигналу об операции автоматического приведения в действие и первому целевому значению давления, управления работой тормозного цилиндра 16 и отправки собранной информации о состоянии системы торможения на модуль отображения тормоза. Модуль 14 управления тормоза собирает информацию о состоянии всех модулей и блоков системы торможения, информацию о рабочем состоянии локомотива, информацию о состоянии тормозного цилиндра 16 и т.д. и отправляет вышеупомянутую информацию на модуль 15 отображения тормоза. В частности, когда модуль 14 управления тормоза управляет работой тормозного цилиндра 16, если модуль 12 автоматического приведения в действие выдает сигнал о начале операции автоматического приведения в действие, большее значение из первого целевого значения давления и второго целевого значения давления принимается в качестве фактического целевого значения давления; и,
если модуль 12 автоматического приведения в действие выдает сигнал о выходе из операции автоматического приведения в действие, второе целевое значение давления принимается в качестве фактического целевого значения давления.
В вышеупомянутом варианте осуществления модуль управления тормоза преобразует полученные электрические сигналы, относящиеся к уровню торможения в тормозном контроллере, в соответствующий сигнал о давлении, за счет чего получают второе целевое значение давления тормозного цилиндра.
Согласно вышеупомянутой системе торможения локомотива c автоматическим приведением в действие, предоставленной в варианте осуществления настоящей заявки, вновь добавляемая функция автоматического приведения в действие заключена в оболочку с использованием модульного способа, и только сигнал об операции автоматического приведения в действие и первое целевое значение давления выдаются в наружную часть, что не оказывает дополнительного влияния на нормальную работу первоначальной системы торможения. Система торможения локомотива обладает высокими свойствами разъединения, совместима с первоначальной системой торможения, аппаратное обеспечение которой не модернизировалось, обладает высокой адаптивностью, и улучшены реализуемость, надежность и стабильность автоматического приведения в действие в системе торможения. Кроме того, улучшается уровень автоматизма системы торможения локомотива, снижается интенсивность труда оператора на локомотиве, снижаются затраты рабочей силы, и усилие торможения применяется более научным и разумным образом.
В одном варианте осуществления настоящей заявки дополнительно предлагается способ автоматического приведения в действие для системы торможения локомотива. Как показано на фиг. 2, способ включает следующие этапы.
S1: информация о состоянии системы 1 торможения выдается модулем 15 отображения тормоза.
В одном варианте осуществления настоящей заявки на этапе S1 информация о состоянии системы 1 торможения может представлять собой информацию о состоянии всех модулей и блоков системы 1 торможения, информацию о рабочем состоянии локомотива, информацию о состоянии тормозного цилиндра 16 и т.д. и используется для обеспечения обратной связи для тормозного контроллера 13 для выдачи информации об уровне торможения, относящейся к усилию торможения, для образования замкнутого контура управления.
S2: тормозной контроллер 13 выдает информацию об уровне торможения, относящуюся к усилию торможения, согласно информации о состоянии.
В варианте осуществления настоящей заявки машинист локомотива изменяет уровень торможения в тормозном контроллере 13 согласно информации о состоянии модуля 15 отображения тормоза, и информация об уровне торможения, относящаяся к усилию торможения, выдается согласно положению рукоятки тормоза в тормозном контроллере 13.
S3: модуль 12 автоматического приведения в действие выполняет обмен информацией в виде данных с центром 2 управления автоматическим приведением в действие, обнаруживает информацию в виде данных, выдаваемую модулем 14 управления тормоза, и выдает сигнал об операции автоматического приведения в действие и первое целевое значение давления тормозного цилиндра.
В одном варианте осуществления настоящей заявки этап S3, в частности, включает:
S31: автомат 121 состояний модуля 12 автоматического приведения в действие выполняет обмен информацией в виде данных с центром 2 управления автоматическим приведением в действие и обнаруживает информацию в виде данных, выдаваемую модулем 14 управления тормоза;
S32: осуществляется управление переключением системы 1 торможения между разными состояниями согласно информации в виде данных на этапе S31; и
S33: сигнал об операции автоматического приведения в действие и первое целевое значение давления тормозного цилиндра выдаются согласно результату переключения на этапе S32.
Разные состояния системы торможения на этапе S32, в частности, включают:
состояние ожидания, состояние исполнения, состояние активного выхода и состояние нештатного выхода.
Сигнал об операции автоматического приведения в действие на этапе S33 включает сигнал о начале операции автоматического приведения в действие и сигнал о выходе из операции автоматического приведения в действие.
Когда система 1 торможения находится в состоянии ожидания, это означает, что система 1 торможения локомотива включена, модуль 12 автоматического приведения в действие определяет состояние системы 1 торможения в режиме реального времени и осуществляет связь с центром 2 управления автоматическим приведением в действие, и сигналом об операции автоматического приведения в действие является сигнал о выходе (т.е. сигнал в положении 0). Когда система 1 торможения находится в состоянии исполнения, это означает, что система 1 торможения локомотива работает в состоянии автоматического приведения в действие, и сигналом об операции автоматического приведения в действие является сигнал о начале (т.е. сигнал в положении 1). Когда система 1 торможения находится в состоянии активного выхода, это означает, что система 1 торможения локомотива выходит из автоматического приведения в действие из-за внешних факторов, но не выходит полностью из автоматического приведения в действие. Когда система 1 торможения находится в состоянии нештатного выхода, это означает, что система 1 торможения локомотива автоматически выходит из автоматического приведения в действие из-за собственных факторов, но не выходит полностью из автоматического приведения в действие.
В частности, в одном варианте осуществления настоящей заявки этап S32, в частности, включает:
S321: когда система 1 торможения находится в состоянии ожидания, если обнаружена информация о команде управления автоматическим приведением в действие от центра 2 управления автоматическим приведением в действие, система 1 торможения переключается в состояние исполнения, и выдаются сигнал о начале операции автоматического приведения в действие и первое целевое значение давления тормозного цилиндра, как показано на фиг. 3;
S322: когда система 1 торможения находится в состоянии исполнения, если обнаружена информация о команде управления активным выходом от центра 2 управления автоматическим приведением в действие, система 1 торможения переключается в состояние активного выхода; и, если обнаружена информация о неисправности связи или информация о неисправности аппаратного обеспечения, выдаваемая модулем 14 управления тормоза, система 1 торможения переключается в состояние нештатного выхода, как показано на фиг. 4;
S323: когда система 1 торможения находится в состоянии активного выхода, если обнаружена информация, выдаваемая модулем 14 управления тормоза, о том, что рукоятка автоматического тормоза и отдельная рукоятка тормоза в тормозном контроллере 13 возвращаются в рабочее положение после выхода из рабочего положения, система 1 торможения переключается в состояние ожидания, и выдаются сигнал о выходе из операции автоматического приведения в действие и первое целевое значение давления тормозного цилиндра, как показано на фиг. 4; и
S324: когда система 1 торможения находится в состоянии нештатного выхода, если обнаружена информация, выдаваемая модулем 14 управления тормоза, о том, что рукоятка автоматического тормоза в тормозном контроллере 13 возвращается в рабочее положение после установки в положение блокировки и отдельная рукоятка тормоза в тормозном контроллере 13 возвращается в рабочее положение после выхода из рабочего положения, система 1 торможения переключается в состояние ожидания, и выдаются сигнал о выходе из операции автоматического приведения в действие и первое целевое значение давления тормозного цилиндра, как показано на фиг. 4.
S4: модуль 14 управления тормоза анализирует информацию об уровне торможения, относящуюся к усилию торможения, получает второе целевое значение давления тормозного цилиндра, выдает фактическое целевое значение давления тормозного цилиндра согласно сигналу об операции автоматического приведения в действие и первому целевому значению давления, управляет работой тормозного цилиндра 16 и отправляет информацию о состоянии системы 1 торможения на модуль 15 отображения тормоза.
В одном варианте осуществления настоящей заявки этап S4, в частности, включает:
S41: модуль 14 управления тормоза анализирует информацию об уровне торможения, относящуюся к усилию торможения, и получает второе целевое значение давления тормозного цилиндра;
S42: первое целевое значение давления и второе целевое значение давления сравниваются согласно сигналу об операции автоматического приведения в действие;
S43: если сигнал об операции автоматического приведения в действие представляет собой сигнал о начале, большее значение из первого целевого значения давления и второго целевого значения давления принимается в качестве фактического целевого значения давления; и, если сигналом об операции автоматического приведения в действие является сигнал о выходе, второе целевое значение давления принимается в качестве фактического целевого значения давления; и
S44: модуль 14 управления тормоза управляет работой тормозного цилиндра 16 согласно фактическому целевому значению давления и отправляет собранную информацию о состоянии системы 1 торможения на модуль 14 отображения тормоза.
Система торможения локомотива, предусмотренная в варианте осуществления настоящей заявки, используется в вышеупомянутом способе автоматического приведения в действие, предоставленном в варианте осуществления настоящей заявки. Вновь добавляемая функция автоматического приведения в действие заключена в оболочку с использованием модульного способа, и только сигнал об операции автоматического приведения в действие и первое целевое значение давления выдаются в наружную часть, что не оказывает дополнительного влияния на нормальную работу первоначальной системы торможения. Система торможения локомотива обладает высокими свойствами разъединения, совместима с первоначальной системой торможения, аппаратное обеспечение которой не модернизировалось, и обладает высокой адаптивностью. Благодаря использованию автомата состояний достигается полное функциональное логическое управление для автоматического приведения в действие, режимы состояния являются простыми и понятными в переключении, и улучшаются реализуемость, надежность и стабильность автоматического приведения в действие в системе торможения. Кроме того, улучшается уровень автоматизма системы торможения локомотива, снижается интенсивность труда оператора на локомотиве, снижаются затраты рабочей силы, и усилие торможения применяется более научным и разумным образом.
Приведенное выше описание представляет собой только предпочтительные варианты осуществления настоящей заявки, но не предназначено для ограничения настоящей заявки. Специалисты в данной области техники могут вносить в настоящую заявку различные модификации и изменения. Любые модификации, эквивалентные замены, усовершенствования и т.д., осуществляемые в пределах сущности и принципа настоящей заявки, входят в объем правовой охраны настоящей заявки.
Изобретение относится к области техники торможения локомотива, в частности к системе торможения локомотива c автоматическим приведением в действие и способу автоматического приведения в действие. Система (1) торможения транспортного средства, способная обеспечивать автоматическое приведение в действие, содержит: модуль (15) отображения тормоза, используемый для выдачи информации о состоянии системы торможения; тормозной контроллер (13), используемый для выдачи информации о положении тормоза; модуль (12) автоматического приведения в действие, используемый для обмена информацией в виде данных с центром (2) управления автоматическим приведением в действие транспортного средства, обнаружения информации в виде данных, выдаваемой модулем (14) управления тормоза, и выдачи сигнала об операции автоматического приведения в действие и первого целевого значения давления; и модуль (14) управления тормоза, используемый для анализа информации о положении тормоза, получения второго целевого значения давления, выдачи фактического целевого значения давления согласно сигналу об операции автоматического приведения в действие и первому целевому значению давления для управления работой тормозного цилиндра (16) и отправки полученной информации о состоянии системы торможения на модуль (15) отображения тормоза. Модуль (11) связи используется для обеспечения связи между различными модулями или блоками системы (1) торможения транспортного средства и обеспечения связи между системой (1) торможения транспортного средства и центром (2) управления автоматическим приведением в действие транспортного средства. Также предлагается способ торможения транспортного средства, способный обеспечивать автоматическое приведение в действие. Технический результат - простота управления торможением локомотива и повышение надежности системы торможения. 2 н. и 4 з.п. ф-лы, 4 ил.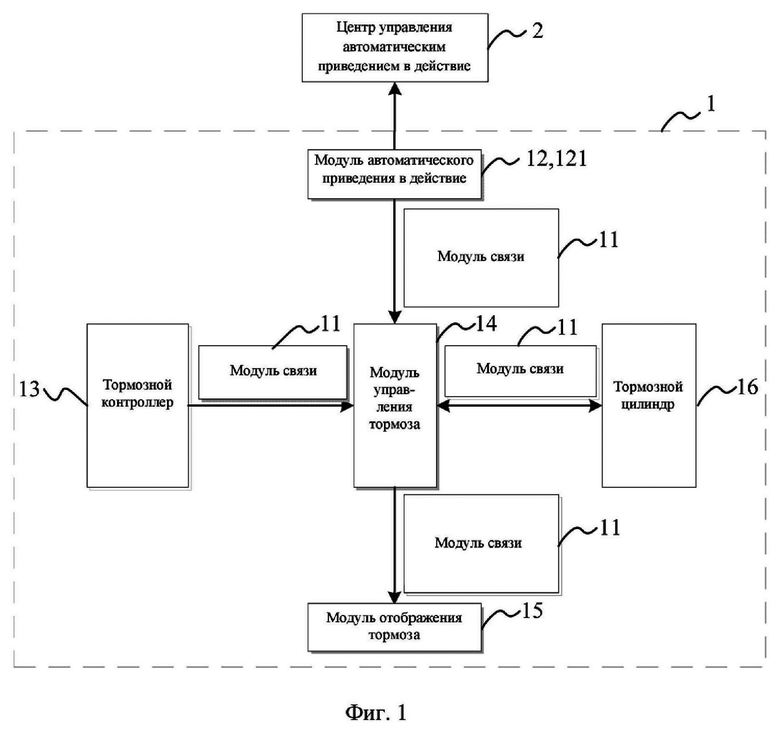
1. Система торможения локомотива c автоматическим приведением в действие, содержащая модуль связи, а также модуль автоматического приведения в действие, тормозной контроллер, модуль управления тормоза и модуль отображения тормоза, которые соединяются посредством модуля связи;
модуль отображения тормоза выполнен с возможностью выдачи информации о состоянии системы торможения;
тормозной контроллер выполнен с возможностью выдачи информации об уровне торможения, относящейся к усилию торможения, согласно информации о состоянии;
модуль автоматического приведения в действие соединен с центром управления автоматическим приведением в действие посредством модуля связи и выполнен с возможностью выполнения обмена информацией в виде данных с центром управления автоматическим приведением в действие, обнаружения информации в виде данных, выдаваемой модулем управления тормоза, и выдачи сигнала об операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра; и
модуль управления тормоза выполнен с возможностью анализа информации об уровне торможения, относящейся к усилию торможения, получения второго целевого значения давления тормозного цилиндра, выдачи фактического целевого значения давления тормозного цилиндра согласно сигналу об операции автоматического приведения в действие и первому целевому значению давления, управления работой тормозного цилиндра и отправки информации о состоянии системы торможения на модуль отображения тормоза;
при этом модуль автоматического приведения в действие содержит автомат состояний, выполненный с возможностью выполнения обмена информацией в виде данных с центром управления автоматическим приведением в действие, обнаружения информации в виде данных, выдаваемой модулем управления тормоза, управления переключением системы торможения между разными состояниями согласно информации в виде данных и выдачи сигнала об операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра согласно результату переключения;
отличающаяся тем, что информация в виде данных, обнаруживаемая модулем автоматического приведения в действие и выдаваемая модулем управления тормоза, включает, помимо прочего, информацию о неисправности связи, информацию о неисправности аппаратного обеспечения, информацию о том, что рукоятка автоматического тормоза и отдельная рукоятка тормоза в тормозном контроллере возвращаются в рабочее положение после выхода из рабочего положения, и информацию о том, что рукоятка автоматического тормоза в тормозном контроллере возвращается в рабочее положение после установки в положение блокировки, а отдельная рукоятка тормоза в тормозном контроллере возвращается в рабочее положение после выхода из рабочего положения.
2. Система торможения локомотива по п. 1, отличающаяся тем, что информация в виде данных, обмен которой выполняется между модулем автоматического приведения в действие и центром управления автоматическим приведением в действие, включает, помимо прочего, информацию о команде управления автоматическим приведением в действие и информацию о команде управления активным выходом.
3. Система торможения локомотива по п. 1, отличающаяся тем, что сигнал об операции автоматического приведения в действие включает сигнал о начале операции автоматического приведения в действие и сигнал о выходе из операции автоматического приведения в действие.
4. Система торможения локомотива по п. 3, отличающаяся тем, что модуль управления тормоза дополнительно выполнен с возможностью:
принятия большего значения из первого целевого значения давления и второго целевого значения давления в качестве фактического целевого значения давления, если модуль автоматического приведения в действие выдает сигнал о начале операции автоматического приведения в действие; и
принятия второго целевого значения давления в качестве фактического целевого значения давления, если модуль автоматического приведения в действие выдает сигнал о выходе из операции автоматического приведения в действие.
5. Способ автоматического приведения в действие системы торможения локомотива, в котором используется система торможения локомотива по п. 1, включающий следующие этапы:
S1: выдача информации о состоянии системы торможения модулем отображения тормоза;
S2: выдача тормозным контроллером информации об уровне торможения, относящейся к усилию торможения, согласно информации о состоянии;
S3: выполнение обмена информацией в виде данных с центром управления автоматическим приведением в действие, обнаружение информации в виде данных, выдаваемой модулем управления тормоза, и выдача сигнала об операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра модулем автоматического приведения в действие; и
S4: анализ информации об уровне торможения, относящейся к усилию торможения, получение второго целевого значения давления тормозного цилиндра, выдача фактического целевого значения давления тормозного цилиндра согласно сигналу об операции автоматического приведения в действие и первому целевому значению давления, управление работой тормозного цилиндра и отправка информации о состоянии системы торможения на модуль отображения тормоза модулем управления тормоза;
при этом этап S3, в частности, включает:
S31: выполнение автоматом состояний модуля автоматического приведения в действие обмена информацией в виде данных с центром управления автоматическим приведением в действие и обнаружение информации в виде данных, выдаваемой модулем управления тормоза;
S32: управление переключением системы торможения между разными состояниями согласно информации в виде данных на этапе S31; при этом разные состояния системы торможения на этапе S32, в частности, включают: состояние ожидания, состояние исполнения, состояние активного выхода и состояние нештатного выхода; и
S33: выдача сигнала об операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра согласно результату переключения на этапе S32, при этом сигнал об операции автоматического приведения в действие включает сигнал о начале операции автоматического приведения в действие и сигнал о выходе из операции автоматического приведения в действие;
отличающийся тем, что этап S32, в частности, включает:
S321: когда система торможения находится в состоянии ожидания, если обнаружена информация о команде управления автоматическим приведением в действие от центра управления автоматическим приведением в действие, переключение системы торможения в состояние исполнения и выдачу сигнала о начале операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра;
S322: когда система торможения находится в состоянии исполнения, если обнаружена информация о команде управления активным выходом от центра управления автоматическим приведением в действие, переключение системы торможения в состояние активного выхода; и, если обнаружена информация о неисправности связи или информация о неисправности аппаратного обеспечения, выдаваемая модулем управления тормоза, переключение системы торможения в состояние нештатного выхода;
S323: когда система торможения находится в состоянии активного выхода, если обнаружена информация, выдаваемая модулем управления тормоза, о том, что рукоятка автоматического тормоза и отдельная рукоятка тормоза в тормозном контроллере возвращаются в рабочее положение после выхода из рабочего положения, переключение системы торможения в состояние ожидания и выдачу сигнала о выходе из операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра; и
S324: когда система торможения находится в состоянии нештатного выхода, если обнаружена информация, выдаваемая модулем управления тормоза, о том, что рукоятка автоматического тормоза в тормозном контроллере возвращается в рабочее положение после установки в положение блокировки и отдельная рукоятка тормоза в тормозном контроллере возвращается в рабочее положение после выхода из рабочего положения, переключение системы торможения в состояние ожидания и выдачу сигнала о выходе из операции автоматического приведения в действие и первого целевого значения давления тормозного цилиндра.
6. Способ по п. 5, отличающийся тем, что этап S4, в частности, включает:
S41: анализ информации об уровне торможения, относящейся к усилию торможения, и получение второго целевого значения давления тормозного цилиндра модулем управления тормоза;
S42: сравнение первого целевого значения давления и второго целевого значения давления согласно сигналу об операции автоматического приведения в действие;
S43: если сигнал об операции автоматического приведения в действие представляет собой сигнал о начале, принятие большего значения из первого целевого значения давления и второго целевого значения давления в качестве фактического целевого значения давления; и, если сигналом об операции автоматического приведения в действие является сигнал о выходе, принятие второго целевого значения давления в качестве фактического целевого значения давления; и
S44: управление работой тормозного цилиндра согласно фактическому целевому значению давления и отправку информации о состоянии системы торможения на модуль отображения тормоза модулем управления тормоза.
| РАСПРЕДЕЛЕННАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ОДНОЛОКОМОТИВНЫМ ПОЕЗДОМ ПОВЫШЕННОЙ ДЛИНЫ | 2009 |
|
RU2388630C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 2010 |
|
RU2428333C1 |
| Устройство для управления торможением маневрового состава | 1983 |
|
SU1131709A1 |

