Изобретение относится к устройству формирования (выдачи машинистом) команд управления режимами тяги и торможения в систему управления электровозов, тепловозов, трамваев, а также для аналогичных задач, где требуется надежность и достоверность формирования команд управления от оператора в дискретном виде.
Из уровня техники в железнодорожном транспорте известен контактный джойстик фирмы Schneider Electric (https://www.schneider-electric.ru/ru/product-range/775-harmony-xk), который содержит несколько механических переключателей для выдачи дискретных команд при определенных положениях рукоятки джойстика в контроллер системы управления верхнего уровня, которая, в свою очередь, преобразует команду в соответствующие действия по управлению тяговыми двигателями. Каждая команда представляет собой низковольтный уровень напряжения (сигнал) и выдается по своему проводу.
Недостатками данного технического решения являются формирование дискретных команд ненадежным механическим контактом, необходимость дополнительного устройства для приведения дискретных сигналов к нужному виду для ввода в систему управления верхнего уровня, отсутствие резервирования формирователей дискретных сигналов и формирования мажоритированного результирующего сигнала. Надежность джойстика основана на качестве исполнения механических контактов, а это, в свою очередь, ограничивает срок службы джойстика до 1 млн. срабатываний.
Из уровня техники известна полезная модель «Блок задатчика позиций бесконтактного контроллера машиниста» по патенту РФ 95894 с датой публикации 10.07.2010, содержащая корпус, кожух, закрывающий корпус, рукоятки, механизм фиксации позиций главной рукоятки, блоки датчиков позиций рукояток.
Из уровня техники известна полезная модель «Контроллер машиниста для управления мотор-вагонным подвижным составом» по патенту РФ 101578 с датой публикации 20.01.2011, содержащая главную рукоятку, выполняющую функцию задатчика позиции тяговой и тормозной схем, механизм фиксации позиций главной рукоятки, блоки датчиков позиций рукояток. Контроллер машиниста снабжен микроконтроллером. Блоки датчиков позиций рукояток подключены к микроконтроллеру, который предназначен для обработки информации, полученной от рукояток, формирования цифрового кода положения рукояток и передачи его в линию связи.
Наиболее близким техническим решением является полезная модель «Блок задатчика позиций бесконтактного контроллера машиниста» по патенту РФ 61939 с датой публикации 10.03.2007, состоящая из корпуса с рукоятками, блока оптоэлектронных датчиков позиций, механизмов фиксации позиций рукояток. Механизм фиксации позиций главной рукоятки состоит из подпружиненного ролика и диска главной рукоятки с углублениями под ролик. Причем количество и расположение углублений соответствует количеству и расположению позиций главной рукоятки.
Недостатком вышеуказанных полезных моделей является отсутствие резервирования датчиков положения рукоятки.
Технической задачей, на решение которой направлено заявляемое изобретение, является создание бесконтактного резервированного устройства ввода команд машиниста, работающего в режиме самовозврата (при отпускании машинистом любой из двух рукояток в рабочей зоне управления, последняя возвращается в нейтральное положение) с фиксацией позиций в отдельных точках рабочей зоны при перемещении рукояток.
Техническими результатами, которые достигаются при использовании изобретения, являются обеспечение бесконтактности устройства, резервирование команд, режим самовозврата рукояток с функциями фиксирования положений рукояток. Дополнительными техническими результатами являются широкий диапазон входного питающего напряжения, повышение надежности и увеличение срока эксплуатации устройства.
Технические результаты достигаются за счет того, что устройство ввода команд содержит два привода, в каждом из которых установлен диск с рукояткой с функцией самовозврата, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик, механизм самовозврата с использованием пружины кручения, держатель двух магнитов, закрепленный на поворотной оси рукоятки, три канала бесконтактных датчиков угла, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита. Микросхемы с датчиками Холла размещены на платах датчиков угла и объединены в трехканальный блок датчиков угла. Все три канала датчиков угла каждого привода соединены с одной общей платой модуля контроллера, в состав которой входят три канала контроллера со своими источниками питания, две схемы (два блока) мажоритации по двум состояниям из трех, электронные ключи формирования команд от обеих рукояток и выходной разъем устройства ввода команд.
Кроме того, устройство ввода команд выполнено с трехкратным резервированием по датчикам угла, контроллеру формирования команды, источникам питания.
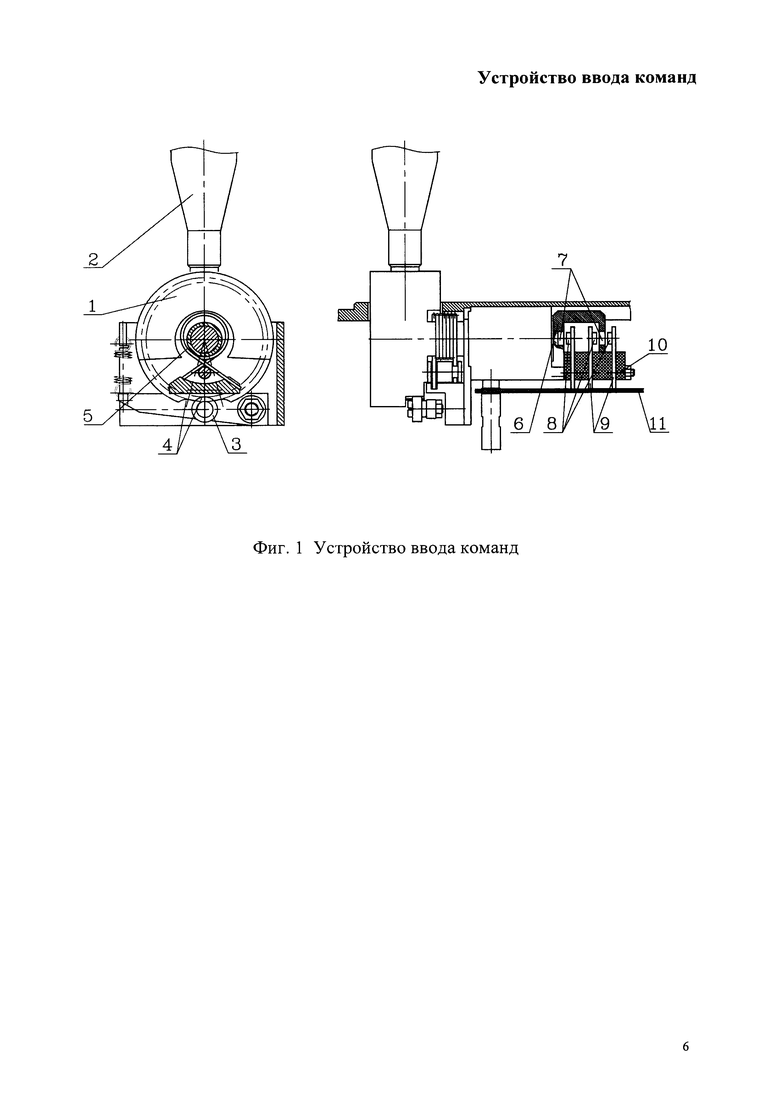
На фиг. 1 приведен чертеж устройства ввода команд машиниста.
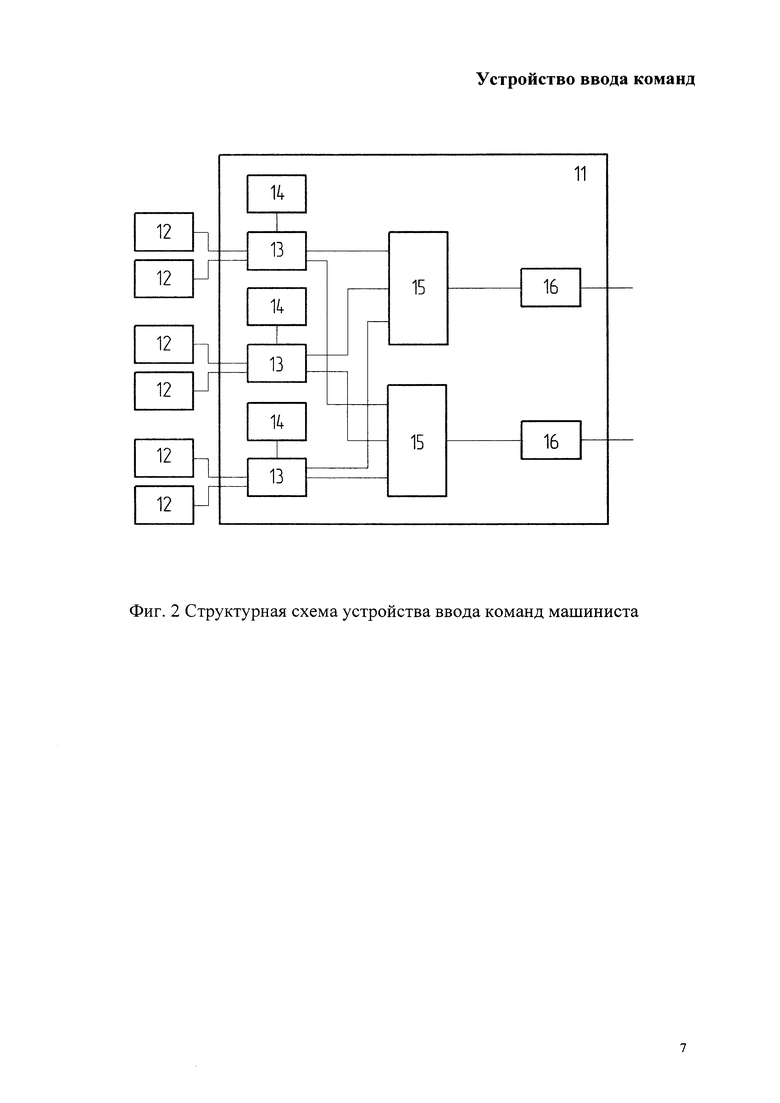
На фиг. 2 приведена структурная схема устройства ввода команд машиниста.
Устройство ввода команд является бесконтактным контроллером машиниста и содержит два привода, в каждом из которых установлены диск 1 с рукояткой 2, механизм фиксации позиций рукоятки с подпружиненным роликом 3 и углублениями 4 под ролик, механизм самовозврата с использованием пружины кручения 5, держатель 6 двух магнитов 7, закрепленный на поворотной оси рукоятки 2, три канала бесконтактных датчиков угла, где каждый канал состоит из микросхемы с использованием датчиков Холла 8 и магнита 7. Микросхемы с датчиками Холла 8 размещены на платах 9 датчиков угла и объединены в трехканальный блок бесконтактных датчиков угла 10. Все три канала датчиков угла каждого привода соединены с одной общей платой модуля контроллера 11, в состав которой входят три канала контроллеров 12 со своими источниками питания 13, две схемы мажоритации 14 по двум состояниям из трех, электронные ключи формирования команд 15 от обеих рукояток 2 и выходной разъем устройства ввода команд. Элементы схемы каждого канала независимы друг от друга.
Устройство ввода команд работает следующим образом.
При повороте рукоятки 2 с диском 1 и приведении рукоятки в любое фиксированное положение, обеспечиваемое подпружиненным роликом 3 и углублением 4 под ролик, включая нейтральное вертикальное, происходит поворот вала с закрепленным на нем держателем 6 магнитов 7 относительно стационарно установленного на плате модуля контроллера 11 блока датчиков угла 10, состоящего из трех плат датчиков угла 9 с закрепленными на них микросхемами с датчиками Холла 8, которые непрерывно производят измерение угла поворота магнитов 7 относительно нулевого положения. Таким образом, формируется положение рукоятки, соответствующее требуемой позиции.
Каждый из трех контроллеров 13 платы модуля контроллера 11 непрерывно циклически опрашивает микросхему блока бесконтактных датчиков угла 12 каждой рукоятки о величине измеренного угла. Контроллер 13 производит обработку полученных данных: нормирование, масштабирование, определение позиции в зависимости от измеренного угла. При настройке модуля контроллера 11 в память контроллеров 13 записываются углы, соответствующие каждой из позиций. При совпадении величины угла, считанной с датчика угла 12, с определенной при настройке, фиксируется, что достигнута данная позиция и контроллер 13 формирует выходной сигнал соответствующей позиции, который он передает на схему мажоритации 14.
Схема мажоритации 14 мажоритирует данные о позиции с трех каналов контроллеров 13 и передает результирующий сигнал на выходные ключи 16, с которых сформированная команда передается через выходной разъем в систему управления верхнего уровня.
При отпускании одной из рукояток, последняя возвращается в нейтральное положение. Самовозврат рукоятки осуществляется за счет пружины кручения 5, расположенной на одной оси с диском 1 рукоятки 2 и держателем магнитов 6, что исключает перекос механизма фиксации позиций рукоятки тяги и торможения. Обе рукоятки устройства работают идентично.
Таким образом, исполнение устройства ввода команд, содержащего два привода, в каждом из которых установлен диск с рукояткой, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик и дополнительно содержащего механизм самовозврата с пружиной кручения, держатель двух магнитов, закрепленный на поворотной оси рукоятки, три канала бесконтактных датчиков угла, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита, при этом микросхемы с датчиками Холла размещены на платах датчиков угла и объединены в трехканальный блок датчиков угла, причем все три канала датчиков угла каждого привода объединены одной общей платой модуля контроллера, в состав которой входят три канала контроллера со своими источниками питания, схема мажоритации по двум состояниям из трех, электронные ключи формирования команд, обеспечивает бесконтактность устройства, резервирование при формировании команд, режим самовозврата рукояток с функциями фиксирования положений рукояток, а также широкий диапазон входного питающего напряжения, повышение надежности и увеличение срока эксплуатации устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| Устройство ввода команд для системы управления подруливающим устройством | 2023 |
|
RU2802096C1 |
| Устройство ввода команд для системы управления винторулевой колонкой судна | 2023 |
|
RU2800615C1 |
| Устройство ввода команд | 2018 |
|
RU2679745C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МАШИНЫ | 2002 |
|
RU2234185C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств. | 2019 |
|
RU2720390C1 |
| Контроллер управления режимами движения рельсовых тяговых транспортных средств | 2019 |
|
RU2720597C1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2012 |
|
RU2491459C1 |
Изобретение относится к устройству управления локомотивами. Устройство ввода команд содержит два привода, в каждом из которых установлен диск с рукояткой, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик. Дополнительно устройство содержит механизм самовозврата с пружиной кручения, держатель двух магнитов, закрепленный на поворотной оси рукоятки, три канала бесконтактных датчиков угла, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита. При этом микросхемы с датчиками Холла размещены на платах датчиков угла и объединены в трехканальный блок датчиков угла. Причем все три канала датчиков угла каждого привода соединены с одной общей платой модуля контроллера, в состав которой входят три канала контроллера со своими источниками питания, схема мажоритации по двум состояниям из трех, электронные ключи формирования команд. Технический результат заключается в повышении надежности и увеличении срока эксплуатации устройства ввода команд. 1 з.п. ф-лы, 2 ил.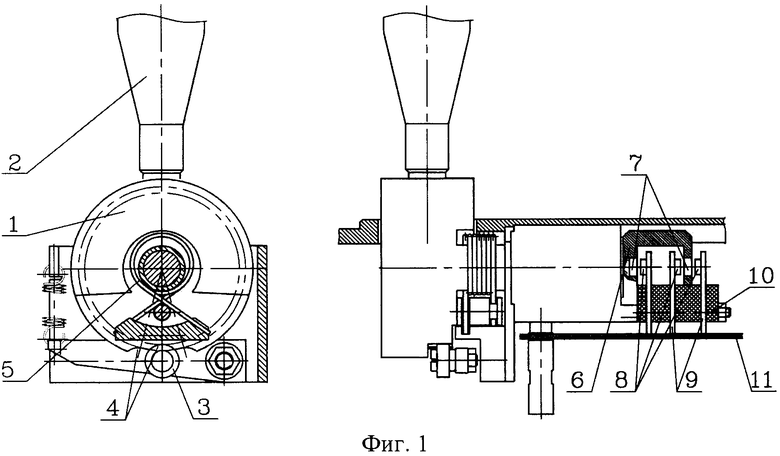
1. Устройство ввода команд, содержащее два привода, в каждом из которых установлен диск с рукояткой, механизм фиксации позиций рукоятки с подпружиненным роликом и углублениями под ролик, отличающееся тем, что содержит механизм самовозврата с пружиной кручения, держатель двух магнитов, закрепленный на поворотной оси рукоятки, три канала бесконтактных датчиков угла, где каждый канал состоит из микросхемы с использованием датчиков Холла и магнита, при этом микросхемы с датчиками Холла размещены на платах датчиков угла и объединены в трехканальный блок датчиков угла, причем все три канала датчиков угла каждого привода соединены с одной общей платой модуля контроллера, в состав которого входят три канала контроллера со своими источниками питания, схема мажоритации по двум состояниям из трех, электронные ключи формирования команд.
2. Устройство ввода команд по п. 1, отличающееся тем, что выполнено с трехкратным резервированием по датчикам угла, контроллеру формирования команды, источникам питания.
| Огнетушащая установка автоматического действия | 1950 |
|
SU95894A1 |
| 0 |
|
SU174021A1 | |
| ЗАДАТЧИК КОМАНД УПРАВЛЕНИЯ | 2015 |
|
RU2644143C2 |
| Узел рычага управления | 1982 |
|
SU1210672A3 |
| FR 2972073 A1, 31.08.2012. | |||

