Изобретение относится к средствам борьбы с беспилотными воздушными судами (БВС) различного функционального назначения и может быть использовано в системах защиты объектов, территорий и зон воздушного пространства. Такие системы предполагают обнаружение БВС и воздействие на него средствами радиоподавления и огневого поражения.
Известны способы и устройства борьбы с БВС, основанные на обнаружении, расчете пространственных координат и их физическом поражении ракетным вооружением, беспилотным летательным аппаратом-перехватчиком, сетью-ловушкой, пространственно-протяженной паутиной [см., например, патент RU 2700107 С1, МПК F41H 11/02; G01S 13/86, опубл. 12.09.2019 г., патент RU 2743401 С1, МПК В64С 39/02, F41H 11/02, опубл. 18.02.2021 г., полезная модель RU 72754, U1, МПК F41H 13/00, опубл. 27.04.2008 г., патент RU 2674392 С1, МПК F41H 13/00, опубл. 07.12.2018 г.].
Недостатки таких способов и устройств заключаются в сложности обнаружения, определения координат и наведения средств поражения на малозаметные БВС. Кроме того, ограниченная зона поражения БВС одним выстрелом не обеспечивает высокой вероятности поражения, а большой расход боеприпасов может оказаться экономически не всегда выгодным с точки зрения уничтожения недорогих БВС.
Известны способы и устройства борьбы с БВС, основанные на обнаружении БВС и радиоэлектронном поражении (подавлении) их бортовых устройств [см., например, патент RU 2551821 С1, МПК H01Q 1/00, опубл. 27.05.2015 г.; патент RU 2666126 С1, МПК G01S 7/36, H04K 3/00, опубл. 06.09.2018 г.; патент RU 2656247, С1, МПК H04K 3/00, опубл. 04.06.2018 г.]. Недостатком данных способов и устройств является необходимость создания мощного электромагнитного излучения для радиоэлектронного поражения, которое оказывает вредное воздействие на человека и радиоэлектронные средства другого назначения. Излучение радиопомех в широком секторе пространства, из-за сложности определения местоположения БВС, приводит к высоким требованиям к мощности радиопомех и создает проблемы обеспечения электромагнитной совместимости в группировке радиоэлектронных средств.
Наиболее близким по технической сущности к заявляемому изобретению является система и способ обнаружения и противодействия беспилотным летательным аппаратам (БЛА), включающая средство первичного обнаружения, средство распознавания, средство нейтрализации, средство управления и классификации. Система обеспечивает обнаружение неизвестного летательного объекта в контролируемой зоне воздушного пространства, определение пространственных координат, захват, классификацию, опознавание и радиоподавление его канала управления [см., например, патент RU 2755603 С2, МПК G06T 7/60, G06T 1/40, G01S 17/00, опубл. 17.09.2021 г.].
Недостатками известной системы являются следующие. В качестве средства первичного обнаружения предлагаются оптико-электронные устройства, которые имеют в условиях искусственных и естественных аэрозольных облачных полей, задымлений, пылевых образований и атмосферных осадков низкую эффективность. В другом предлагаемом варианте исполнения системы для обнаружения БЛА предлагается применение аудиоприемника или радара, что также проблематично из-за малой акустической и радиолокационной заметности БЛА. В предпочтительном варианте исполнения известной системы для первичного обнаружения применяют лидар и GPS-приемник (см. патент RU 2755603, формула изобретения). Кроме того, в системе отсутствуют средства нейтрализации GPS-приемников, размещаемых на БЛА, что существенно снижает эффективность борьбы с БЛА. Подавление только канала управления не исключает решения беспилотным летательным аппаратом поставленных полетных задач.
Техническим результатом изобретения является повышение эффективности защиты объектов от несанкционированного применения БВС путем пассивного обнаружения, определения текущих координат, курса и скорости движения беспилотных воздушных судов по сигналам их радиомодемов, формирования радиопомех приемным устройствам каналов радиосвязи и радионавигации, а также формирования ложных (искаженных) сигналов глобальных навигационных спутниковых систем (ГНСС).
Указанный технический результат достигается тем, что в состав системы обнаружения и противодействия беспилотным воздушным судам включены:
- комплекс обнаружения и сопровождения (КОС) БВС, реализующий разностно-дальномерный метод обнаружения воздушного судна. Комплекс состоит из центрального и трех периферийных приемных постов, объединенных системой внутрикомплексной связи;
- комплекс воздействия на БВС средствами радиопомех, включающий пост воздействия на каналы радиосвязи, пост воздействия на приемники ГНСС и излучения ложных (искаженных) сигналов навигации;
- комплекс управления с линиями связи.
Указанный технический результат достигается тем, что комплекс обнаружения и сопровождения имеет возможность комплексирования (объединения) полученной информации с данными от радиолокационных, оптических и других сенсоров обнаружения БВС.
Указанный технический результат достигается тем, что архитектура системы обнаружения и противодействия БВС позволяет осуществлять ее масштабирование в зависимости от пространственных размеров прикрываемой зоны за счет объединения нескольких аналогичных систем при едином централизованном управлении.
Указанный технический результат достигается тем, что комплекс управления позволяет осуществлять дистанционный выбор режимов и алгоритмов работы системы обнаружения и противодействия БВС.
Указанный технический результат достигается тем, что система способна взаимодействовать с комплексами огневого поражения БВС.
Сущность изобретения заключается в реализации разностно-дальномерного метода определения координат, курса и скорости движения БВС с возможностью (при необходимости) комплексирования полученной информации с данными от радиолокационных, оптических и других сенсоров и радиоподавлении каналов управления и навигации БВС, в том числе путем создания ложной навигационной обстановки. Точностные характеристики системы позволяют формировать целеуказания огневым средствам, а ее архитектура построения и алгоритмы функционирования обеспечивают возможность пространственного масштабирования системы и дистанционного управления.
Возможность технической реализации предлагаемой системы обнаружения и противодействия БВС подтверждена на конкретном примере. Этот реализованный пример выполнения системы не ограничивают объем правовой защиты настоящего изобретения, определенного формулой. Существуют и другие варианты осуществления настоящего изобретения, согласующиеся с сущностью и объемом настоящего изобретения.
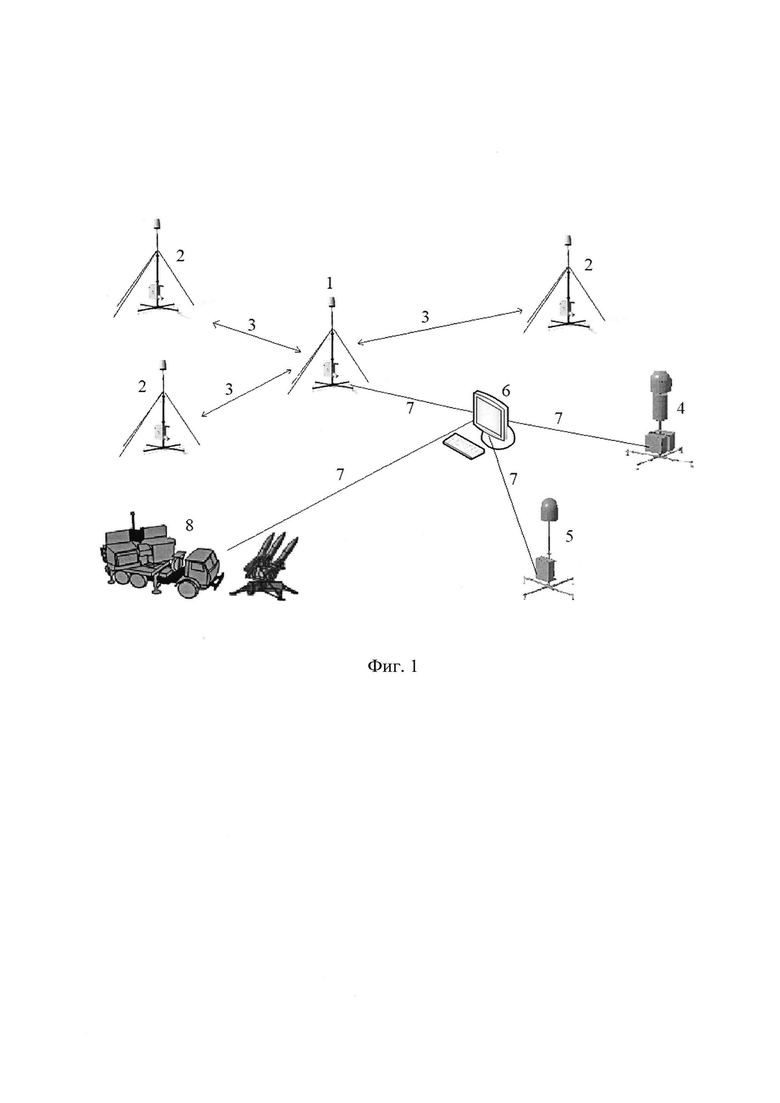
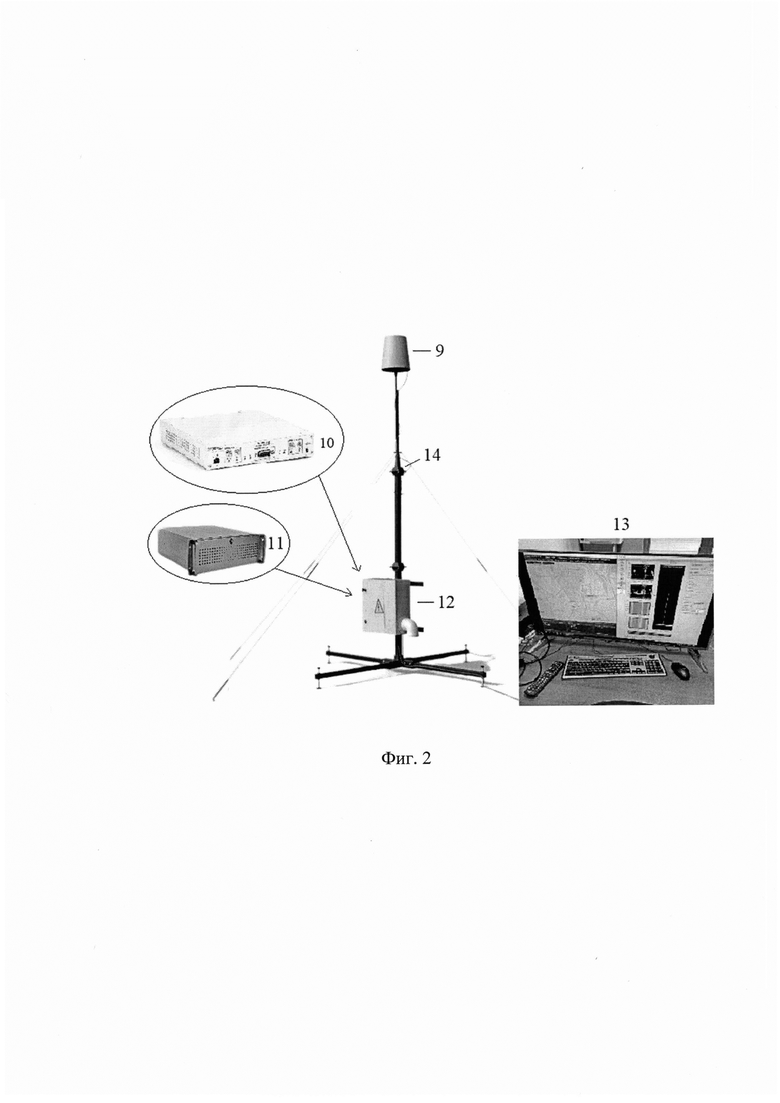
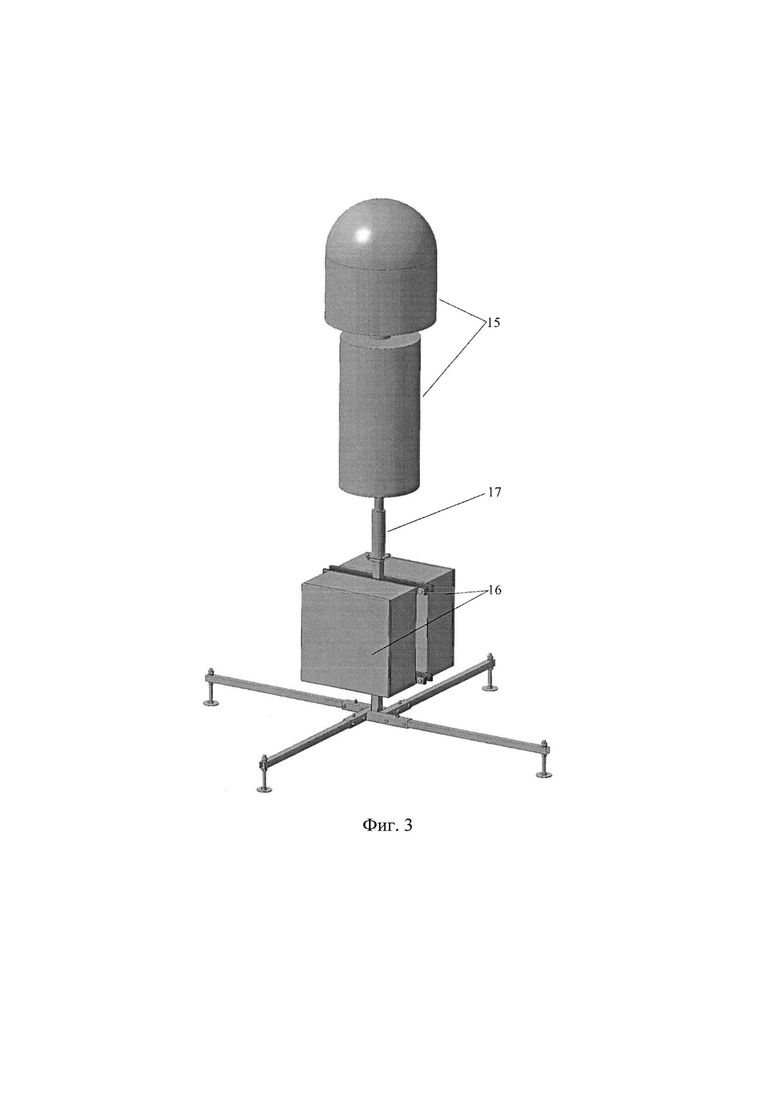
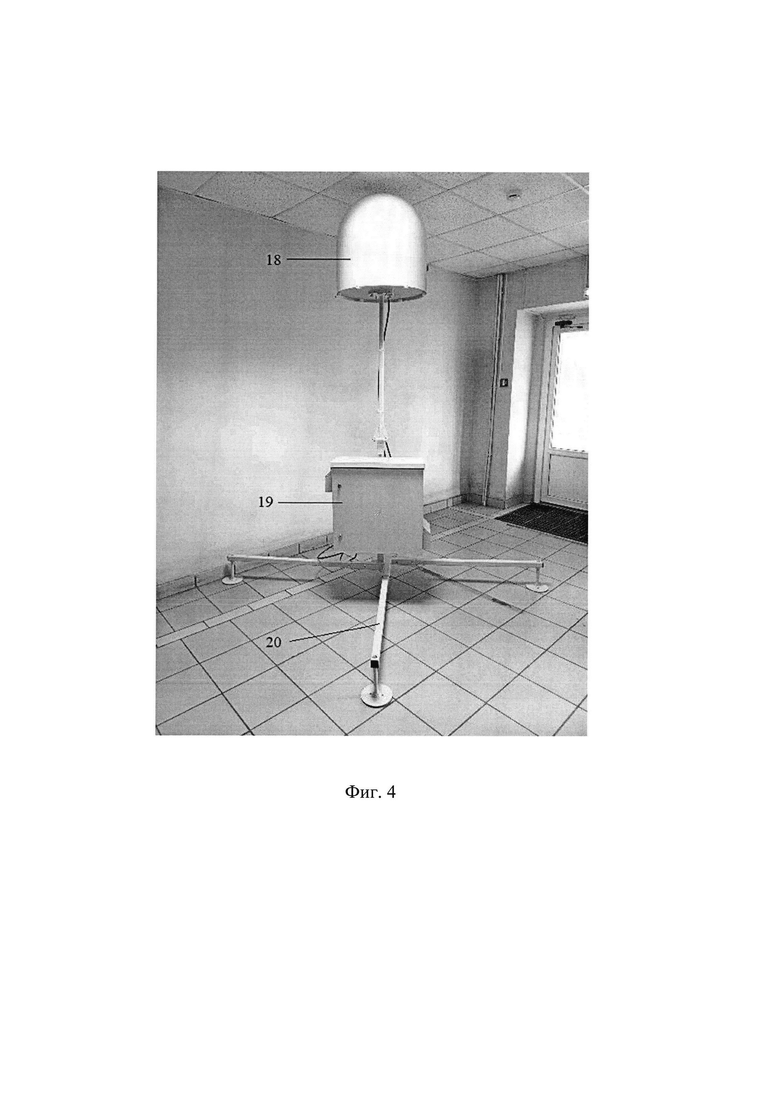
Состав системы и вариант ее исполнения поясняются чертежами, на которых представлены: состав системы обнаружения и противодействия БВС (фиг. 1); центральный приемный пост комплекса обнаружения и сопровождения (фиг. 2); пост воздействия на каналы радиосвязи (фиг. 3); пост воздействия на приемники ГНСС (фиг. 4).
Система состоит из комплекса обнаружения и сопровождения, включающего центральный приемный пост 1, периферийные приемные посты 2, линии внутрикомплексной связи 3; комплекса воздействия, включающего пост воздействия на каналы радиосвязи 4, пост воздействия на приемники ГНСС и излучения ложных (искаженных) сигналов навигации 5; комплекса управления 6; линий связи 7. Система взаимодействует с внешними устройствами (радиолокационная станция, оптические сенсоры, комплексы огневого поражения) 8.
Все устройства в реализованном варианте системы выполнены с использованием известных выпускаемых промышленностью радиотехнических элементов.
Центральный и периферийные приемные посты с линиями внутрикомплексной связи реализуют разностно-дальномерный метод определения координат БВС по излучениям их радиомодемов. Центральный пост осуществляет обнаружение и классификацию сигналов БВС, обработку информации периферийных постов и управление ими. При этом разности расстояний от постов до БВС определяются по максимумам взаимокорреляционной функции сигналов от БВС, синхронно принятых на разнесенных в пространстве постах.
Вариант технической реализации центрального приемного поста (фиг. 2) содержит приемную антенну 9, цифровое радиоприемное устройство 10, спецвычислитель со специальным программным обеспечением 11, телекоммуникационный термостатический бокс 12, автоматизированное рабочее место (АРМ) 13, комплект монтажных частей (стойка, растяжки, крепеж) 14.
В качестве приемной антенны применена биконическая антенна НШПАБ 0,3-7,0 ГГц [https://www.niistt.ru/products.aspx, дата обращения 15.06.2022]. Цифровое радиоприемное устройство, выполненное на основе изделия «USRP - 2954» [https://www.ni.com/ru-ru/support/model.usrp-2954.html, дата обращения 15.06.2022], осуществляет сканирование частотного диапазона и аналого-цифровое преобразование радиосигналов. Спецвычислитель представляет собой сервер, выполняющий обработку принятых сигналов. Цифровое радиоприемное устройство и спецвычислитель размещены в телекоммуникационном термостатическом боксе, выполненном на основе изделия «Шкаф телекоммуникационный всепогодный уличный» [https://kolmen.ru/shkaf-telekommunikatsionniy-rmt01-6506-12, дата обращения 15.06.2022]. Автоматизированное рабочее место оператора реализовано на базе сервера обработки результатов радиомониторинга. Автоматизированное рабочее место обеспечивает интерактивную визуализацию текущей обстановки по обнаружению БВС, отображение на карте местности приемных постов, местоположения и траектории БВС, редактирование информации, управление отображением графических элементов, а также резервирование функций спецвычислителя.
Периферийные приемные посты предназначены для обнаружения и классификации сигналов БВС, обработки и передачи текущей информации на центральный пост. Периферийные приемные посты включают те же компоненты, что и центральный пост, за исключением АРМ оператора.
Линии внутрикомплексной связи между приемными постами выполнены на основе изделия «Точки доступа MikroTik SXT 6» [https://mikrotik.ru/katalog/katalog/hardware/wifi_routers/wireless_systems/RBSX TG-6HPnD, дата обращения 15.06.2022].
Вариант технической реализации поста воздействия на каналы радиосвязи БВС (фиг. 3) содержит комплект передающих антенн 15, передатчики радиопомех 16, комплект монтажных частей 17. Пост воздействия на каналы радиосвязи БВС обеспечивает формирование прицельных, заградительных и свипирующих по частоте радиопомех. Комплект передающих антенн обеспечивает перекрытие требуемого частотного диапазона (вариант технической реализации выполнен для диапазона 400-6000 МГц), защищен радиопрозрачными обтекателями. Передатчики радиопомех выполнены в литерном исполнении на выпускаемых промышленностью цифровых функциональных элементах и твердотельных усилителях. Управление видами и параметрами формируемых радиопомех осуществляется комплексным управлением системы по линии связи.
Вариант технической реализации поста воздействия на приемники ГНСС и излучения ложных (искаженных) сигналов навигации (фиг. 4) содержит передающую антенну на опорно-поворотном устройстве 18, передатчик радиопомех 19, комплект монтажных частей 20. Пост обеспечивает формирование сигналоподобных радиопомех, повторяющих структуру навигационных сигналов ГНСС, а также формирование ложных (искаженных) сигналов навигации. Ложные сигналы обеспечивают подмену легитимных сигналов ГНСС сигналами с искаженной частотно-временной радионавигационной информацией. Передатчик радиопомех содержит формирователи радиопомех и ложных сигналов, выполненные на цифровых функциональных элементах, и усилитель мощности. Все элементы поста являются типовыми радиоэлектронными устройствами с известными техническими решениями [см., например, патент RU 2721749 С1, МПК H04K 3/00, опубл. 21.05.2020 г., патент RU 2495527, С1, МПК H04K 3/00, опубл. 10.10.2013 г. ]. Диапазон рабочих частот соответствует рабочему диапазону ГНСС. Управление видами и параметрами формируемых радиопомех осуществляется комплексным управлением по линии связи.
Комплекс управления системы выполнен в виде АРМ. Он обеспечивает управление работой всех элементов системы, отображение на карте местности составных частей системы и обнаруженных БВС, ведение баз данных и формирование отчетов по результатам работы. Автоматизированное рабочее место реализовано на базе компьютера. Установленное специальное программное обеспечение позволяет в интересах повышения эффективности противодействия БВС проводить совместную обработку информации, получаемой от комплекса обнаружения и сопровождения и от внешних радиолокационных, оптических и других сенсоров. Предусмотрено подключение комплекса управления к территориально распределенным информационным сетям, что позволяет дистанционно контролировать факт появления БВС в контролируемой зоне и управлять функционированием системы обнаружения и противодействия беспилотным воздушным судам.
Система обнаружения и противодействия беспилотным воздушным судам работает следующим образом.
На подготовительном этапе выбираются места развертывания центрального 1 и периферийных 2 приемных постов КОС, поста воздействия на каналы радиосвязи 4 и поста воздействия на приемники ГНСС 5. Места размещения выбираются на господствующих в районе защищаемого объекта высотах (зданиях, сооружениях, вышках) из условия обеспечения прямой видимости для устойчивого приема сигналов БВС не менее, чем тремя постами. Координаты мест размещения приемных постов заносятся в базу данных АРМ. Организуются линии внутрикомплексной связи 3, линии связи 7 и устанавливается связь с внешними взаимодействующими устройствами 8.
Приемные посты 1, 2 комплекса обнаружения и сопровождения включаются по командам с комплекса управления 6 в режим поиска сигналов БВС. Все посты комплекса по назначенному алгоритму сканируют заданные частотные диапазоны. На центральный приемный пост поступают частотные панорамы и результаты обнаружения сигналов, где осуществляется распознавание сигналов радиомодемов БВС на основе сравнения с записанными в базе данных эталонными сигналами. Определение местоположения БВС осуществляется разностно-дальномерным методом, при этом разности расстояний определяются по максимумам взаимокорреляционной функции сигналов БВС, синхронно принятых разнесенными в пространстве приемными постами. Синхронизация между постами реализуется по сигналам реперного источника радиоизлучений. Обнаружение, определение текущих координат, курса и скорости движения малоразмерных БВС по сигналам их радиомодемов происходит в автоматическом режиме. Результаты обнаружения БВС отображаются на электронной карте местности, записываются и хранятся в базе данных АРМ комплекса управления 6.
По результатам обнаружения БВС принимается решение на радиоподавление каналов управления и (или) навигации БВС. Пост воздействия на каналы радиосвязи 4 обеспечивает формирование и излучение прицельных, заградительных и свипирующих по частоте радиопомех в диапазоне работы каналов управления БВС.
Пост воздействия на приемники ГНСС 5 обеспечивает формирование сигналоподобных радиопомех методом прямого цифрового синтеза. При этом формируются сигналоподобные радиопомехи для каждой из глобальных навигационных систем («Навстар», ГЛОНАСС, «Галилео», «Бейдоу») и затем методом сложения оперативно формируется необходимый групповой сигнал, обеспечивающий постановку радиопомех заданной комбинации навигационных систем. Сформированная передатчиком 19 радиопомеха через передающую антенну 18 излучается в направлении БВС. Пост воздействия на приемники ГНСС 5 обеспечивает также формирование ложных (искаженных по амплитуде, времени задержки, доплеровскому смещению частоты) сигналов ГНСС. Это позволяет осуществить скрытую интеллектуальную подмену реальных навигационных сигналов ложными с теми же навигационными параметрами. Формирование ложных сигналов (сигналов с искаженными навигационными параметрами в заданной зоне пространства) выполняется на основе данных о местоположении БВС и реальных навигационных сигналах ГНСС в заданной зоне. Синхронизация ложных и истинных сигналов позволяет осуществить плавное изменение одного или нескольких навигационных параметров, определяемых навигационным приемником БВС (скорости, высоты, направления движения). Этим достигается возможность динамической коррекции траектории движения БВС-носителя навигационного приемника ГНСС в реальном масштабе времени.
Радиоподавление каналов управления и навигации БВС обеспечивает повышение эффективности защиты объектов за счет срыва (нарушения) выполнения БВС заданной программы полета, нарушения траектории движения, его вынужденной посадки или выхода из контролируемой зоны. Этим достигается заявленный технический результат.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые радиоэлектронные узлы и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса | 2020 |
|
RU2769037C2 |
| Комплекс создания радиопомех аппаратуре потребителей глобальных навигационных спутниковых систем | 2019 |
|
RU2726939C1 |
| Пространственно-распределенная система радиоподавления НАП ГНСС с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей | 2017 |
|
RU2649407C1 |
| ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННЫЙ КОМПЛЕКС СРЕДСТВ СОЗДАНИЯ РАДИОПОМЕХ | 2014 |
|
RU2563972C1 |
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| Пространственно-распределенная система радиопомех на беспилотных летательных аппаратах | 2023 |
|
RU2807312C1 |
| Способ радиопротиводействия беспилотному воздушному судну | 2024 |
|
RU2839399C1 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| Временной компенсатор для обеспечения электромагнитной совместимости отечественного передатчика радиопомех НАП ГНСС противника с отечественной НАП ГНСС при их одновременной работе на совпадающих частотах | 2016 |
|
RU2608585C1 |
| Роботизированная пространственно-распределенная система радиоэлектронного подавления приемных устройств потребителей глобальных навигационных спутниковых систем | 2017 |
|
RU2666126C1 |
Изобретение относится к средствам борьбы с беспилотными воздушными судами (БВС) различного функционального назначения и может быть использовано в системах защиты объектов, территорий и зон воздушного пространства, предполагающих обнаружение БВС и воздействие на него средствами радиоподавления и огневого поражения.Техническим результатом изобретения является повышение эффективности защиты объектов от несанкционированного применения БВС.В состав заявленной системы обнаружения и противодействия беспилотным воздушным судам включены комплекс обнаружения и сопровождения БВС, реализующий разностно-дальномерный метод обнаружения воздушного судна, состоящий из центрального и трех периферийных приемных постов, объединенных системой внутрикомплексной связи, комплекс воздействия на БВС средствами радиопомех, включающий пост воздействия на каналы радиосвязи, пост воздействия на приемники глобальных навигационных спутниковых систем (ГНСС) и излучения ложных сигналов навигации, комплекс управления с линиями связи. Система обеспечивает пассивное обнаружение, определение текущих координат, курса и скорости движения беспилотных воздушных судов по сигналам их радиомодемов, формирование радиопомех приемным устройствам каналов радиосвязи и радионавигации, а также формирование ложных сигналов ГНСС. 2 з.п. ф-лы, 4 ил.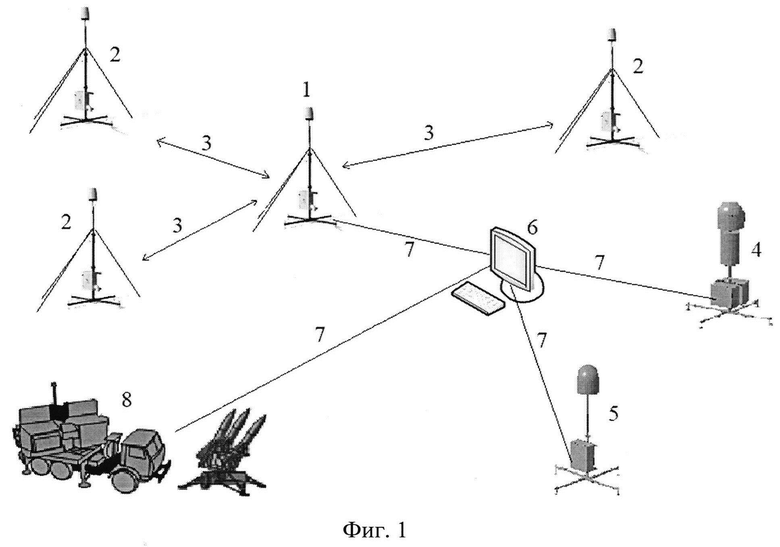
1. Система обнаружения и противодействия беспилотным воздушным судам (БВС), включающая комплекс обнаружения и сопровождения (КОС) БВС, реализующий разностно-дальномерный метод, на основе центрального и трех периферийных приемных постов, объединенных системой внутрикомплексной связи, комплекс воздействия на БВС средствами радиопомех, включающий пост воздействия на каналы радиосвязи, пост воздействия на приемники глобальных навигационных спутниковых систем (ГНСС) и излучения ложных сигналов навигации, комплекс управления, связанный с КОС и комплексом воздействия на БВС линиями связи, при этом центральный и периферийные приемные посты содержат последовательно соединенные приемную антенну, цифровое радиоприемное устройство и сервер с программным обеспечением, позволяющим в автоматическом режиме обнаруживать, определять текущие координаты, курс и скорости движения малоразмерных БВС по сигналам их радиомодемов, пост воздействия на каналы радиосвязи включает комплект передающих антенн и передатчики радиопомех в литерном исполнении с перекрытием частотного диапазона 400-6000 МГц, обеспечивающие формирование прицельных, заградительных и свипирующих по частоте радиопомех, пост воздействия на приемники ГНСС и излучения ложных сигналов навигации содержит передающую антенну на опорно-поворотном устройстве и передатчики сигналоподобных радиопомех и ложных сигналов в диапазоне работы ГНСС, комплекс управления выполнен в виде автоматизированного рабочего места с программным обеспечением, позволяющим проводить совместную обработку информации, получаемой от КОС, внешних радиолокационных, оптических сенсоров, и взаимодействовать с комплексами огневого поражения.
2. Система по п. 1, отличающаяся тем, что ее архитектура позволяет масштабировать систему в зависимости от пространственных размеров прикрываемой зоны за счет объединения нескольких аналогичных систем при едином централизованном управлении.
3. Система по п. 1, отличающаяся тем, что комплекс управления позволяет осуществлять дистанционный выбор режимов и алгоритмов работы системы обнаружения и противодействия БВС.
| Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса | 2020 |
|
RU2769037C2 |
| Контрольно-измерительная система радиомониторинга | 2022 |
|
RU2790349C1 |
| Система и способ обнаружения и противодействия беспилотным летательным аппаратам | 2019 |
|
RU2755603C2 |
| СПОСОБ И УСТРОЙСТВО МНОГОФАКТОРНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ МИНИАТЮРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2771865C1 |
| Система и способ защиты от беспилотных летательных аппаратов в воздушном пространстве населенного пункта | 2019 |
|
RU2746090C2 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| МЕТОД ПОРАЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2572924C2 |
| US 10156631 B2, 18.12.2018 | |||
| CN 114812279 A, 29.07.2022 | |||
| EP 3499175 B1, 01.09.2021 | |||
| CN 114508966 A, 17.05.2022 | |||
| CN 107271968 A, 20.10.2017. | |||
