Изобретение относится к сельскохозяйственному ма1чиностроению, в частности к сельскохозяйственным агрегатам .
Известен сельскохозяйственный агрегат, включающий два параллельно расположенных трактора, соединенные между собой передней и задней траверсами для присоединения различных сельскохозяйственных .орудий П .
Однако при увеличении .ширины захвата агрегата у него увеличиваются время на развороты в конце гона, что снижает коэффициент земельного использования.
Известен сельскохозяйственный агрегат, включающий ходовые части, несущую ферглу, соединенную с ходовыми частями с помощью шарниров, систему автоматического управления ходовыми частями С2.
Недостаток известного агрегата отсутствие возможности оогона одной ходовой части относительно другой, что снижает надежность конструкции.
Цель изобретения - повышение надежности конструкции.
Это достигается тем, что ходовая чзсть снабжена направляющей, в которой установлен один из концов несущей фермы.
Причем ходовые части нмоот привод их поворота на 360° .
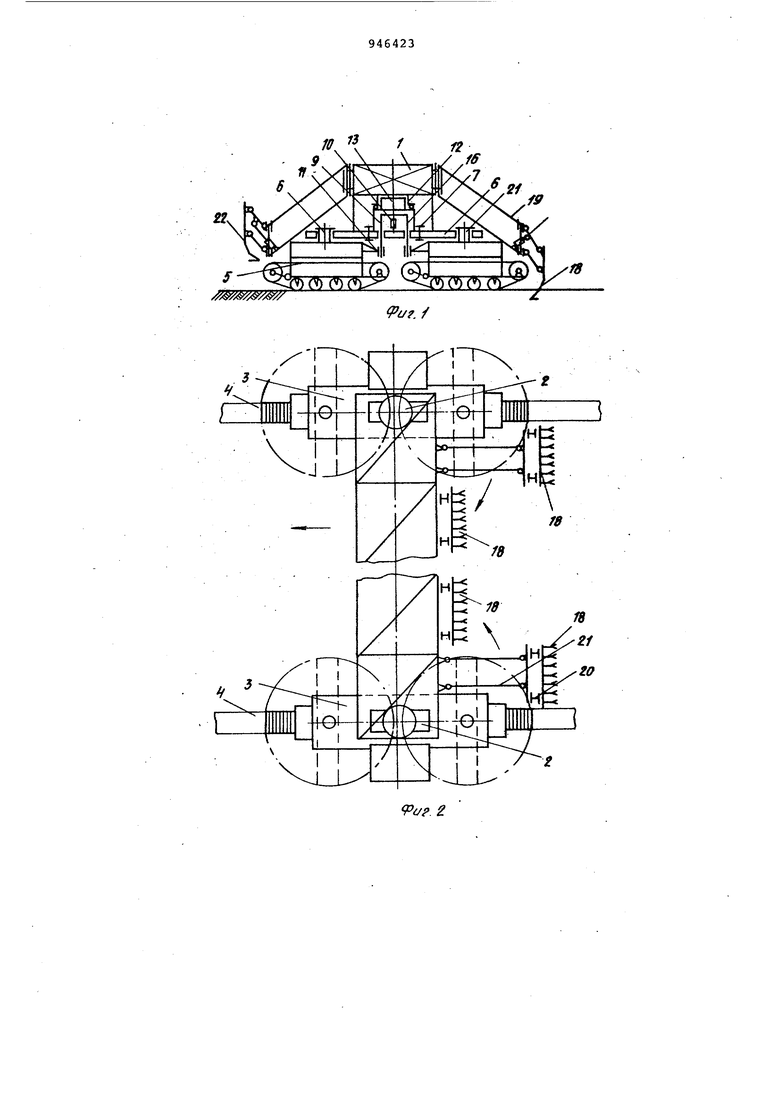
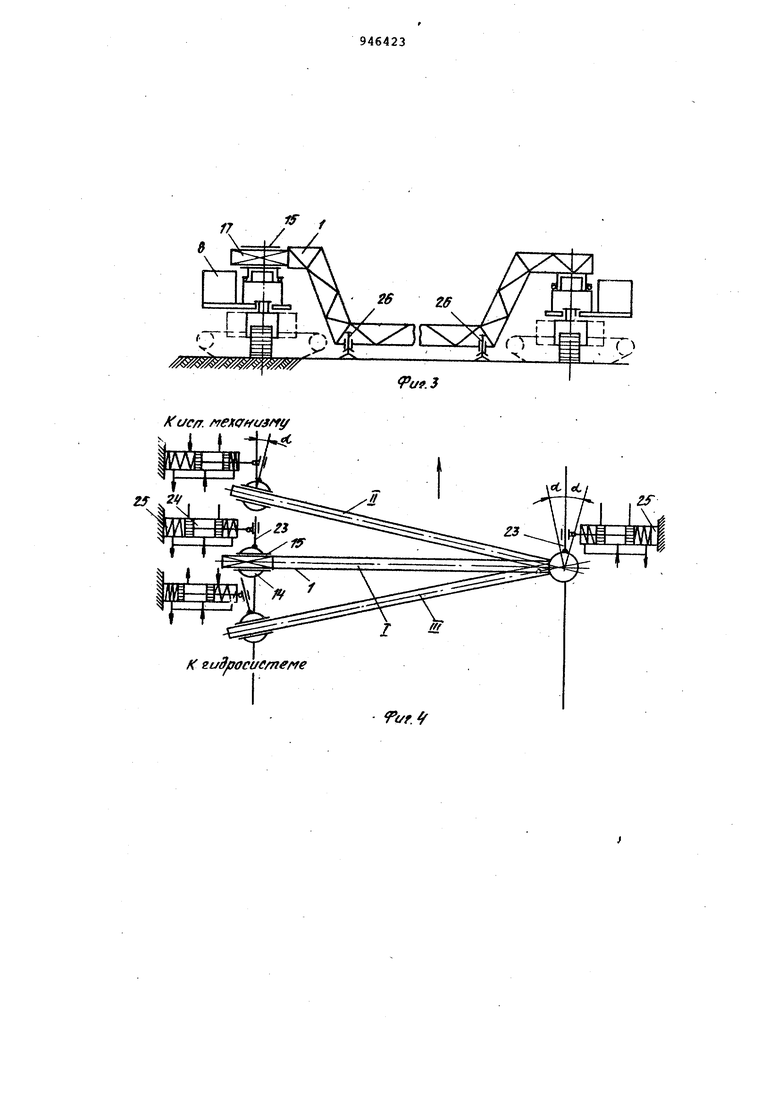
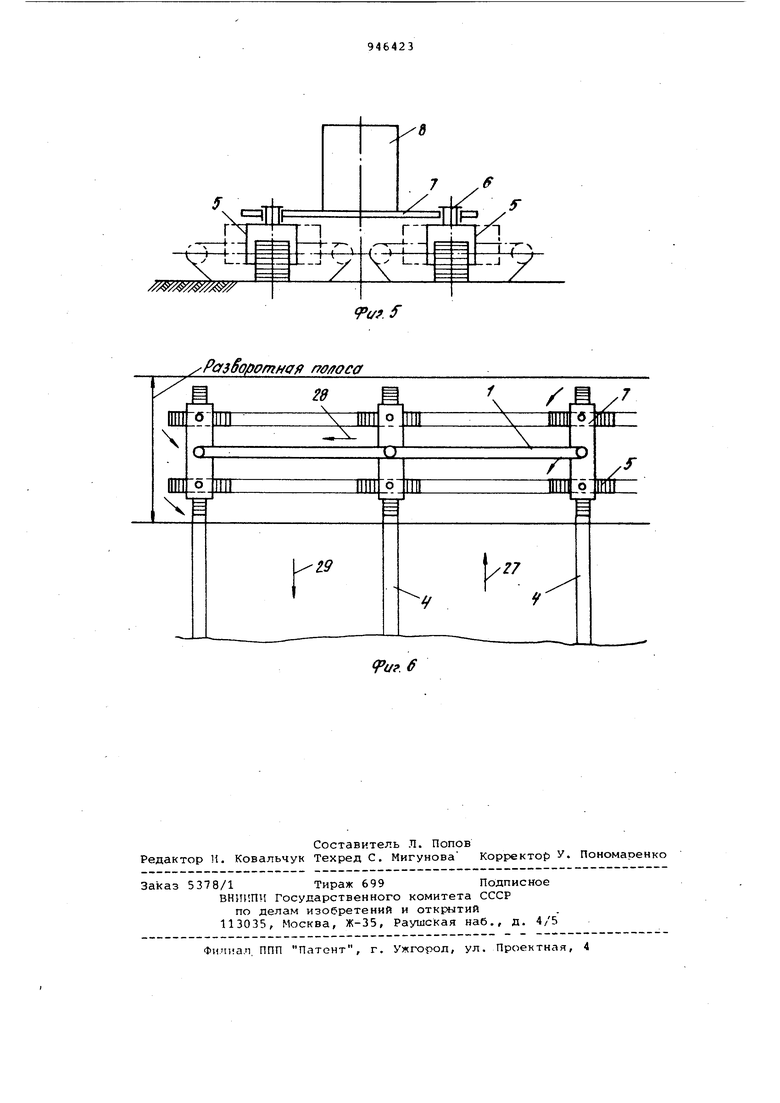
На фиг. 1 представлена схема агрегата, вид сбоку; на фиг. 2 -то же, вид сверху (левые рабочие органы не показаны) f на фиг. 3 - то же, вид сзади, без рабочих органов; на фиг. 4 10схема работы системы автоматического управления тележками с гидрозолотником; на фиг. 5 - схема передвижной тележки (трактора), вид спереди; на фиг. 6 - схема .разворота агрегата в
15 конце гона.
Агрегат состоит из фермы 1 шарниров 2 и пары автонс 1ных передвижных тележек 3 и колеи 4. Каждая из передвижных тележек выполнена самосто2Сятельно и состоит из минимум двух движетелей 5, например, гусеничного типа (возможно, и колесного), поворотных вокруг оси 6 на относительно центральной рамы 7 и кабины 8
2- (механизм поворота не показан На раме 7 имеется устройство для фиксации движетелей 5, представляющее собой раму 9 -управляемую гидроцилиндром 10 и взаимодействующую с гнездами 11
0 движетелей 5. Каждый из шарнирюв 2 состоит из стойки 12, оси 13 и втулки 14, на одной из которых расположеэна направляющая 15 ((фиг. 3}. С по мощью устройства 16 стойки 12.закреп ля:ются на центральных рамах тележек Ферма 1 с правой стороны жестко устанавливается на втулку 14 (фиг, 3), а с левой хвостовиком 17 опира;ется на- направляющую 15 с возможностью пбфемегдения вдоль нее. На ферму 1 с помощью параллелограммных подвесок кренятся задние секции рабочих органов 18, переводимые в. рабочее и тран спортное полох ение с помощью гидроцилиндров 19. Крайние секции 20 монтируются относительно фермы 1 на поворотных рамах 21, фиксируемых в рабочем и транспортном положениях Сфиксаторы не показаны). С противоположной стороын навешиваются передние рабочие органы 22 (фиг. 1), На втулках 14 жестко смонтированы рычаги 23, являющиеся датчиками системы автоматического управления передвижными тележками 3. Рычаги 23 кинемати чески связаны со штоком 24 золотника 25, установленного на стойке 12. На ферме 1 установлены регулируемые опоры 26. Работа агрегата происходит следующим образом. Передвижные тележки 3 подъезжают к ферме 1 с установленныз 4ина ней рабочими орханамн 18 и 22. Ферма 1 при этом стоит на опорах 26„ С помощью механизма 16 стойки 12 шарниров 2 присоединяются к центральным рамам 7 Затем присоединяются различные коммуникации, ведущие от передвижных тележек к ферме 1 и рабочим ораганам (гидравлические трубки, электропрово да и др.). Поднимаются опоры 26., и агрегат движется к обрабатываемому учс1стку. Крайние рамы 22 при этом находятся в транспортном положении (внутри фермы 1) и не меыают встречному транспорту. После прибытия .на участок агрегат устанавливается перед колеей 4. Движители 5 разворачиваются и устанавливаются в одну линию (колею) и/фиксируются в этом положении с помощью гидроцилиндра 10, Рамы 21 разворачиваются в рабочее положение и стопорятся, ;.3адниё.рабочие органы 18 с помощью згидроцилиндров 19 опускаются и агрегат начинает двигаться вдоль колеи 4 по стрелке 27 (фиг. 6) В конце гона рабочие органы 18 поднимаются, движители 5 размыкаются -разворачиваются на 90, и агрегат перемещается по стрелке 28 на новую позицию, после чего движители опять раз ворачиваются на 90° и фиксируются по одноколейной схеме. Передние рабочие органы 22 (фиг; 1) опускаются, и агрегат начинает двигаться в обратном Направлении по стрелке 29. При выходе вперед одной из тележек 3, например, левой (фиг. 4) хвостовик 17 в направляющей 15 разворачивает втулку 14, которая через рычаг 23 перемещает шток- 24 гидрозолотника 25 вправо на угол (положение II фиг. 4).Поток масла при этом направляется к исполнительному мexaниз ly, кинематически связанному с рейкой топливного насоса (при механическом приводе тележек 3), причем движители левой тележки 3 получают сигнал на снижение скорости, а правой - на увеличение. Если привод гидростатический, то подается сигнал соответственно на уменьшение производительности гидронасоса левой тележки и увеличение правой. Скорости обеих тележек выравниваются, и рычаги 23 занимают нейтральное положение I (фиг. 4). При отстаивании левой тележки 3 рычаг 23 перемещается влево на yrond, посылая при Этом сигнал на увеличение скорости левой тележки, а движители правой тележки наоборот - на снижение скорости. Ферма 1 занимает положение, перпендикулярное направлению движения, и работа агрегата продолжается. После окончания.работ агрегат приезжает на стоянку, выдвигаются опоры 26, тележки 3 разъединяются со стойками 12, отсоединяются коммуникации, а движители 5 разворачиваются на , принимая двухколейную схему (фиг. 5). После 3TOi,o каждая из ходовых тележек 3 может самостоятельно использоваться на других сельскохозяйственных работах, что повышает эффективность работы предлагаемого сельскохозяйственного агрегата по сравнению с известньми. Формула изобретения 1.Сельскохозяйственный агрегат, включающий ходовые части, несущую ферму, соединенную с ходовыми частями с помощью шарниров, систему автоматического управления ходовыми частями отличающийся тем, что, с целью повышения надежности конструкции, ходовая часть снабжена, направляющей, в которой установлен один из концов несущей . 2.Агрегат по п. 1, отлич аю щ и и с я тем, что ходовые части имеют привод их поворота на 360. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 671764, кл. А 01 В 51/02, 1979. 2 о Авторское свидетельство СССР № 674704, кл. А 01 В 51/04, 1979.
хй®й8 5«
f9
l/.f
в
Kucfr. /vex 7fff/J/ ff
f( zu9pocuefnffMe
uf.3
f/r.
(Ри.б
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство сельскохозяйственного назначения | 1978 |
|
SU715042A1 |
| Транспортное средство сельскохозяйственного назначения | 1977 |
|
SU649348A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1990 |
|
RU2032294C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ПРОСТРАНСТВЕННЫХ ФЕРМ ДВУХКОНСОЛЬНЫХ ДОЖДЕВАЛЬНЫХ АГРЕГАТОВ | 1999 |
|
RU2156058C1 |
| АГРОМОСТ | 1999 |
|
RU2160517C1 |
| Транспортное средство сельскохозяйственного назначения | 1980 |
|
SU898972A1 |
| Лесозаготовительная машина | 1971 |
|
SU439264A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1063303A1 |
| Система канатной тяги для сельскохозяйственных и мелиоративных работ | 1990 |
|
SU1777669A1 |
| АГРОМОСТ | 1997 |
|
RU2113779C1 |