Изобретение относится к радиотехнике, в частности к способам компенсации системной помехи в полнодуплексном режиме передачи данных и выделения полезного сигнала с помощью адаптивной фильтрации, и может быть использовано в системах связи с периодическим характером канальных помех, таких как линии электропитания.
Известен способ компенсации системной помехи в полнодуплексном режиме передачи данных, описанный в статье под названием «A time domain approach of acoustic echo cancellation based on particle swarm optimization» [1]. Данный способ заключается в том, что компенсация системной помехи осуществляется с помощью фильтрации принятого сигнала, причем оптимальный вектор весовых коэффициентов фильтра определяется с помощью стохастического метода оптимизации, основанного на имитации социального поведения роя частиц, в качестве которых выступают несколько взаимодействующих частиц, имеющих на каждой итерации свои координаты и своё ускорение в заданном пространстве, размерность которого совпадает с длинной вектора весовых коэффициентов, а в качестве функции ошибок используется среднеквадратичное отклонение.
Недостаткам данного способа является его большая вычислительная сложность и низкий уровень компенсации системной помехи.
Наиболее близким к заявляемому способу компенсации системной помехи является способ, описанный в книге под названием «Адаптивная фильтрация сигналов: теория и алгоритмы» [2]. В этом способе компенсацию системной помехи в полнодуплексном режиме передачи данных производят с помощью цифрового фильтра, подстройка коэффициентов которого осуществляется с помощью адаптивного алгоритма, основанного на минимизации взвешенной ошибки наименьших квадратов. В данном случае производится прием отсчетов суммы известного сигнала помехи и неизвестного полезного сигнала из канала, представляющих собой первый входной сигнал, а также заранее сохраненные отсчеты передаваемого известного помехового сигнала, представляющих собой второй входной сигнал, далее производится фильтрация второго входного сигнала с помощью изначально заданных весовых коэффициентов фильтра, инициализация которых происходит в нулевых состояниях, производится вычисление коэффициентов Калмана и обратной автокорреляционной матрицы с помощью второго входного сигнала, затем производится вычисление предварительной ошибки с помощью первого входного сигнала и фильтрованного сигналов, а также производится расчет вектора весовых коэффициентов, участвующего в последующих итерациях фильтрации второго входного сигнала на основе вычисленных коэффициентов Калмана и сигнала ошибки.
Недостатком этого технического решения является низкий уровень компенсации системной помехи в условиях периодических помех, вызванных влиянием переменной составляющей силовой цепи питания.
Задача, на решение которой направлено предлагаемое техническое решение, – повышение уровня компенсации системной помехи в условиях периодических помех, вызванных влиянием переменной составляющей силовой цепи питания.
Решение поставленной задачи достигается тем, что в способе компенсации системной помехи в полнодуплексном режиме передачи данных, осуществляемым с помощью цифрового фильтра, подстройка коэффициентов которого производится посредством адаптивного алгоритма, основанного на минимизации взвешенной ошибки наименьших квадратов, включающем прием отсчетов суммы известного сигнала помехи и неизвестного полезного сигнала из канала, представляющих собой первый входной сигнал, а также заранее сохраненные отсчеты передаваемого известного помехового сигнала, представляющих собой второй входной сигнал, фильтрацию второго входного сигнала с помощью изначально заданных весовых коэффициентов фильтра, инициализация которых происходит в нулевых состояниях, вычисление коэффициентов Калмана и обратной автокорреляционной матрицы с помощью второго входного сигнала, вычисление предварительной ошибки с помощью первого входного сигнала и сигнала, полученного в результате фильтрации второго входного сигнала, а также расчет вектора весовых коэффициентов, участвующего в последующих итерациях фильтрации второго входного сигнала на основе вычисленных коэффициентов Калмана и предварительной ошибки, дополнительно вводятся операция задержки второго входного сигнала, операция задержки первого входного сигнал, участвующего в последующем расчете итоговой ошибки, расчет итоговой ошибки, результатом которой является восстановленный неизвестный сигнал, процедура сохранения рассчитанного вектора весовых коэффициентов фильтра, посредством которого осуществляется фильтрация задержанного второго входного сигнала, также вводится операция сброса для реинициализации вычисляемого вектора весовых коэффициентов, обратной автокорреляционной матрицы и вектора коэффициентов Калмана, выполняемая через интервал времени, соответствующий времени когерентности канала, с целью предотвращения влияния значительных изменений первого входного сигнала на дальнейший процесс адаптации цифрового фильтра.
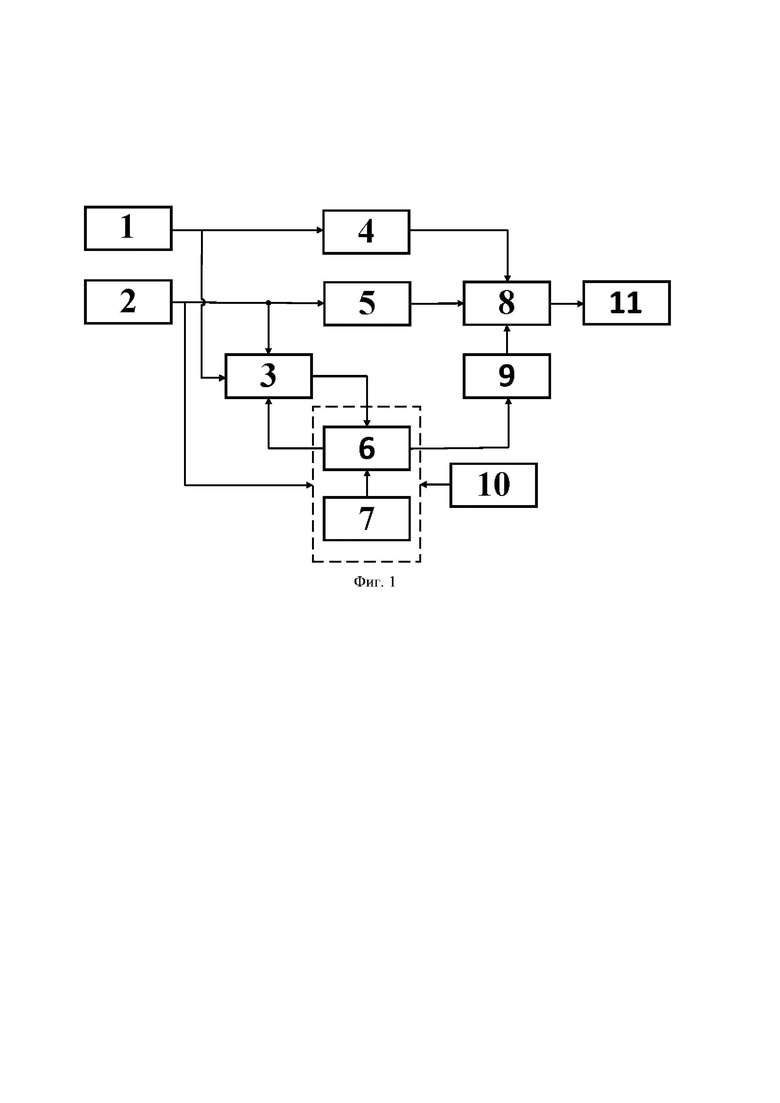
Функциональная схема предлагаемого способа приведена на фиг. 1, на которой обозначено: 1 – первый входной сигнал; 2 – второй входной сигнал; 3 – операция фильтрации и вычисление предварительной ошибки; 4 – операция задержка первого входного сигнала; 5 – операция задержка второго сигнала; 6 – операция вычисления весовых коэффициентов фильтра; 7 – операция вычисления коэффициентов Калмана и обратной автокорреляционной матрицы; 8 – операция фильтрации и вычисления итоговой ошибки, 9 – операция сохранения коэффициентов фильтра, 10 – операция сброса; 11 – восстановленный неизвестный сигнал.
В течение интервала времени Т1, равного длительности времени когерентности канала передачи, заранее сохраненные отсчеты передаваемого известного помехового сигнала, представляющие собой второй входной сигнал, фильтруются путем умножения на эрмитово-сопряженный вектор весовых коэффициентов, инициализация которого на первой итерации происходит в нулевых состояниях:
 , (1)
, (1)
 , (2)
, (2)
где  – отсчеты сигнала, полученные в результате фильтрации входного сигнала 2;
– отсчеты сигнала, полученные в результате фильтрации входного сигнала 2;  – эрмитово-сопряженный k-й вектор весовых коэффициентов фильтра;
– эрмитово-сопряженный k-й вектор весовых коэффициентов фильтра;  – k-й вектор вектор входного сигнала 2 длиной N;
– k-й вектор вектор входного сигнала 2 длиной N; – k-й вектор весовых коэффициентов фильтра длинной N.
– k-й вектор весовых коэффициентов фильтра длинной N.
Производится расчет предварительной ошибки, путем вычитания отсчётов сигнала, полученных в результате фильтрации (1) из отсчетов суммы известного сигнала помехи и неизвестного полезного сигнала из канала, представляющих собой первый входной сигнал:
 , (3)
, (3)
где  – сумма искаженных известного и неизвестного сигнала.
– сумма искаженных известного и неизвестного сигнала.
Параллельно вычисляется начальное значение обратной автокорреляционной матрицы как:
 , (4)
, (4)
 , (5)
, (5)
где  – единичная матрица, имеющая размер, равный порядку фильтра,
– единичная матрица, имеющая размер, равный порядку фильтра,  – дисперсия входного сигнала.
– дисперсия входного сигнала.
Причем в последующих итерациях обратная автокорреляционная матрицы вычисляется с помощью параметра экспоненциального взвешивания, обычно принимающего в задаче фильтрации значения 0,99-1, рассчитанного начального значения обратной автокорреляционной матрицы и второго входного сигнала:
 , (6)
, (6)
где  – параметр экспоненциального взвешивания,
– параметр экспоненциального взвешивания,  – эрмитово-сопряженный k-й вектор второго входного сигнала длиной N.
– эрмитово-сопряженный k-й вектор второго входного сигнала длиной N.
Затем с помощью обратной автокорреляционной матрицы (6), рассчитанной в предыдущей итерации, второго входного сигнала и параметра экспоненциального взвешивания вычисляется вектор коэффициентов Калмана:
 , (7)
, (7)
Причем на первой итерации принимается, что обратная автокорреляционная матрица инициализируется в нулевых состояниях:
 , (8)
, (8)
С помощью рассчитанных коэффициентов Калмана (7), а также предварительной ошибки (3) вычисляется вектор весовых коэффициентов фильтра:
 , (9)
, (9)
где  – k-й отсчет комплексно-сопряженного сигнала ошибки.
– k-й отсчет комплексно-сопряженного сигнала ошибки.
Вычисленные значения сохраняются, а исходный эрмитово-сопряженный вектор весовых коэффициентов (9), обратная автокорреляционная матрица (6), вектор коэффициентов Калмана (7) реинициализируются.
После реинициализации параметров фильтра, вычисление вектора весовых коэффициентов фильтра возобновляется в течение следующего интервала времени Т2, равного длительности времени когерентности канала передачи. Задержанный на время, соответствующее интервалу Т1, первый входной сигнал фильтруется с использованием сохраненного вектора весовых коэффициентов, вычисленного в течение интервала времени Т1:
 , (10)
, (10)
где  – сигнал, полученный в результате фильтрации задержанного второго входного сигнала;
– сигнал, полученный в результате фильтрации задержанного второго входного сигнала;  – сохраненный эрмитово-сопряженный вектор второго входного сигнала длиной N;
– сохраненный эрмитово-сопряженный вектор второго входного сигнала длиной N;  – вектор задержанного второго входного сигнала длиной N;
– вектор задержанного второго входного сигнала длиной N;  – интервал времени, соответствующий длительности времени когерентности.
– интервал времени, соответствующий длительности времени когерентности.
При этом сигнал итоговой ошибки вычисляется аналогично сигналу предварительной ошибки:
 , (11)
, (11)
где  – вектор задержанного входного сигнала 1.
– вектор задержанного входного сигнала 1.
Результатом адаптивной фильтрации является восстановленный неизвестный сигнал. Аналогичным образом процесс фильтрации итеративно повторяется на каждом интервале.
Для подтверждения возможности осуществления предлагаемого способа рассмотрим пример осуществления.
В математическом пакете MATLAB осуществляется формирование OFDM символов сигнала помехи и полезного сигнала, сумма которых представляет собой первый входной сигнал. Параметры OFDM символа представлены в таблице 1. Суммарный OFDM символ помехи и полезного сигнала поступает в физический канал силовой линии, далее осуществляется прием переданной последовательности и компенсация сигнала помехи.
Таблица 1 – Параметры OFDM символа
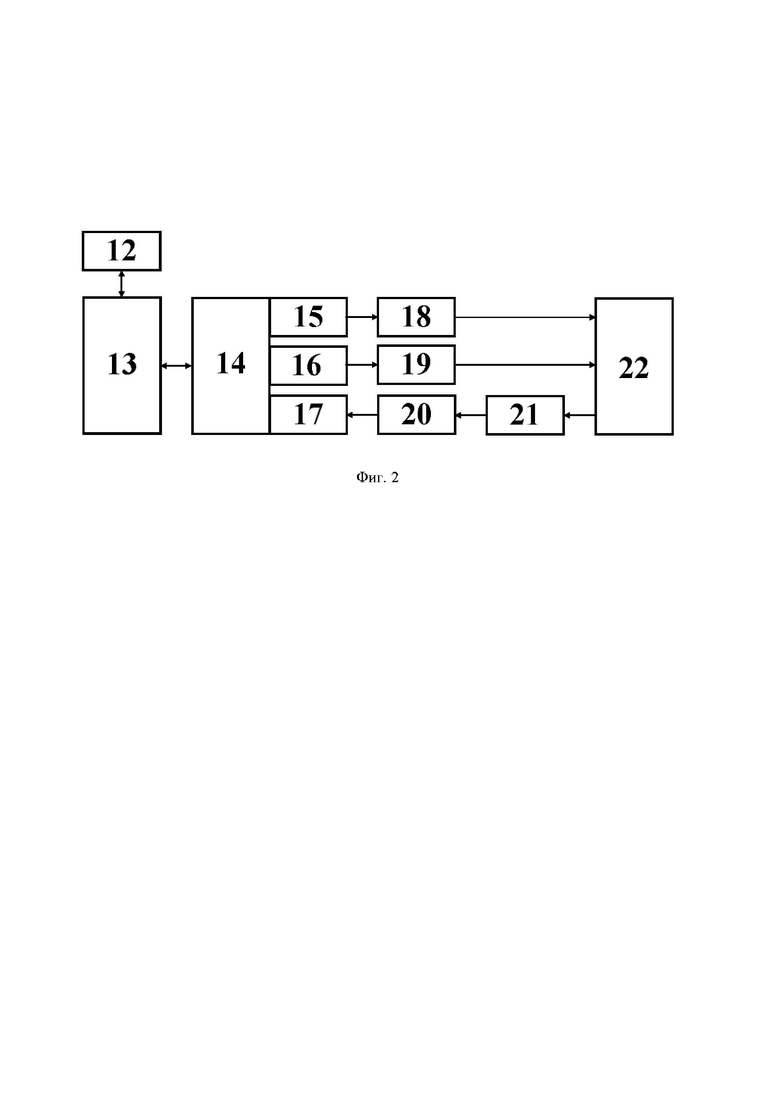
Структурная схема экспериментальной установки приведена на фиг. 2, на которой обозначено: 12 – ПК; 13 – отладочная плата Cyclone V SoC Development Kit; 14 – модуль THDB-ADA; 15 – цифро-аналоговый преобразователь канал А; 16 – цифро-аналоговый преобразователь канал В; 17 – аналого-цифровой преобразователь канал А; 18 – развязывающий трансформатор передатчика; 19 – регулируемый усилитель; 20 – сетевой фильтр; 21 – развязывающий трансформатор приемника; 22 – канал силовой линии.
Генерирование полезного сигнала и сигнала помехи осуществляется на ПК, после чего данные поступают по UART интерфейсу на отладочную плату Cyclone V SoC Development Kit. Соотношение мощностей полезного сигнала и сигнала помехи составляет 1/1. К отладочной плате подключается дополнительный модуль THDB-ADA, с канала A через развязывающее устройство полезный сигнал передается в силовую цепь. С канала B на вход регулируемого усилителя поступает сигнал помеха, который в свою очередь передает усиленный сигнал к силовой линии. К этой же линии подключается развязывающий трансформатор, соединенный с аналого-цифровым преобразователем А канала модуля THDB-ADA. После приема данных на ПК обработка осуществляется в математическом пакете MATLAB.
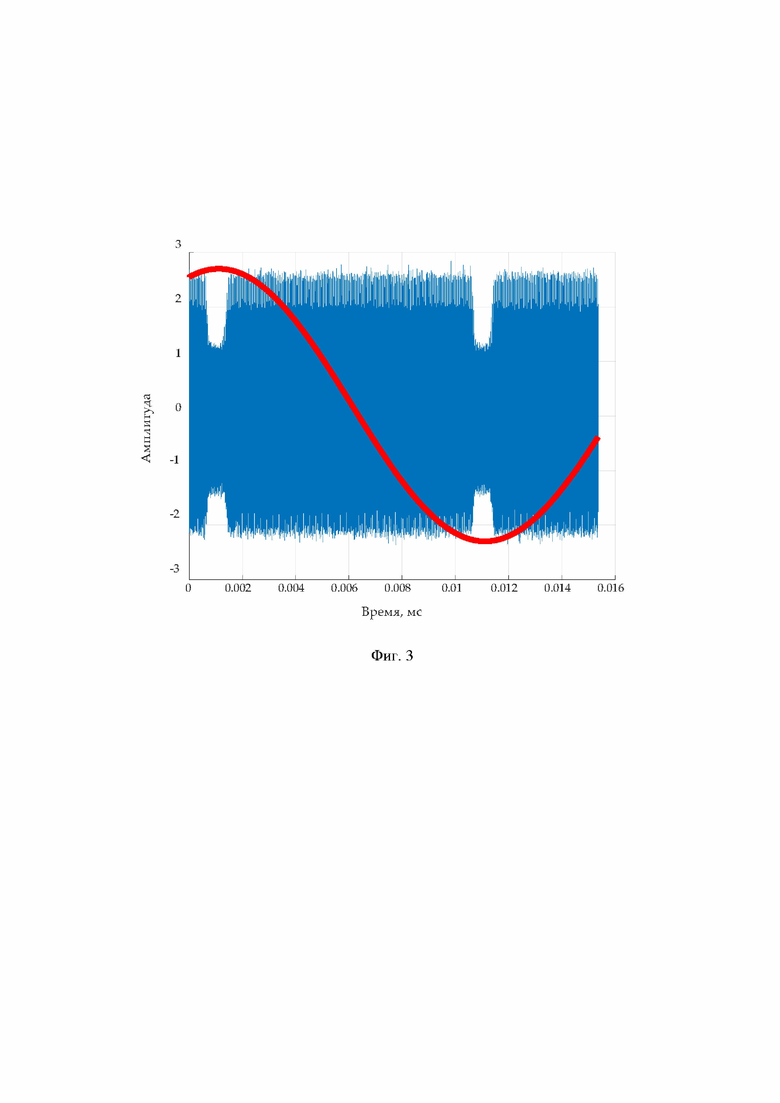
Для наглядности на фиг. 3 представлен принятый массив, на который был наложен гармонический сигнал, повторяющий форму переменной составляющей силовой цепи питания.
В принятых данных выполняется временная синхронизация с полезным сигналом, после чего выделяются 600 OFDM символов. Для подавления сигнала помехи и выделения полезного сигнала используется адаптивный фильтр, работающий в соответствие с вышеописанными алгоритмами.
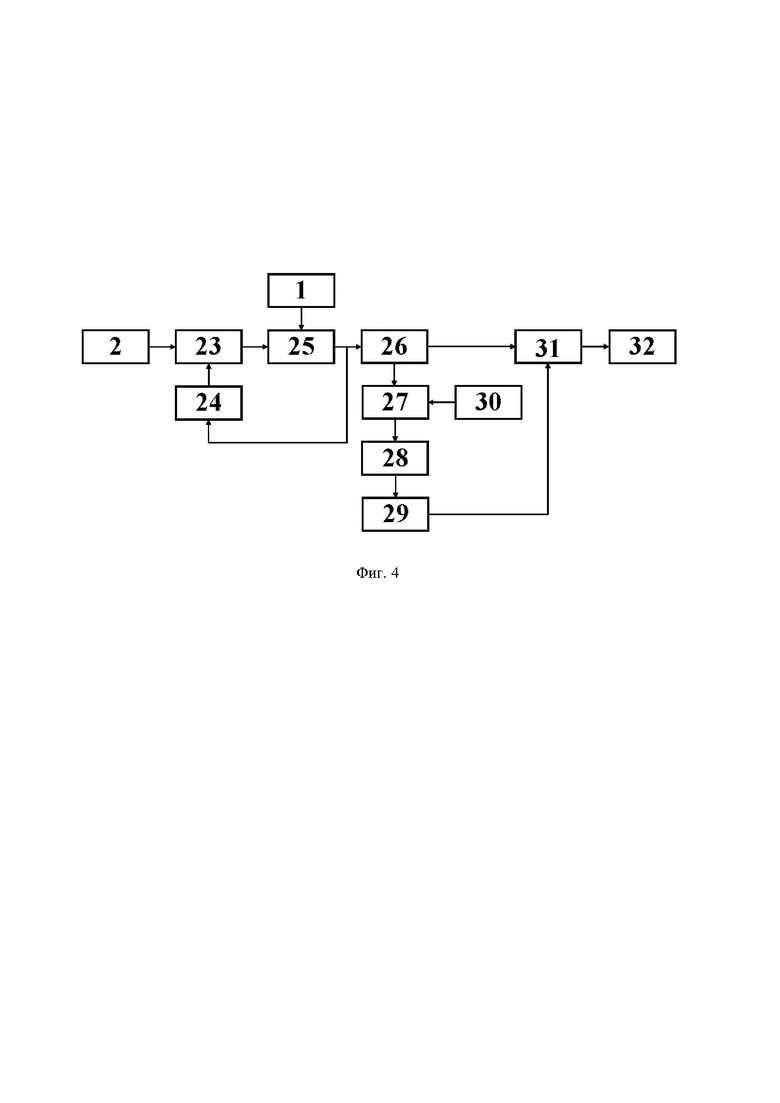
Функциональная схема процесса обработки сигнала приведена на фиг. 4, на которой обозначено: 2 – второй входной сигнал; 23 – цифровой фильтр; 24 – адаптивный алгоритм; 1 – первый входной сигнал; 25 – сумматор; 26 – прямое преобразование Фурье; 27 – оценка канала; 28 – линейная интерполяция; 29 – эквалайзер; 30 – опорные поднесущие; 31 – перемножитель; 32 – расчет отношения мощности сигнала помехи к мощности полезного сигнала.
Второй входной сигнал фильтруется с помощью цифрового фильтра, вычисление коэффициентов которого производится согласно адаптивным алгоритмам, описанным выше. Сигнал ошибки фильтра состоит из полезного сигнала, ошибки настройки фильтра и шума. К сигналу ошибки фильтра применяется быстрое преобразование Фурье, после чего выполняется оценка канала используя пилотные поднесущие. Оценка канала интерполируется вдоль спектра OFDM символа, после чего инвертируется и перемножается с спектром искаженного OFDM символа. Далее рассчитывается отношение мощности сигнала помехи к мощности полезного сигнала.
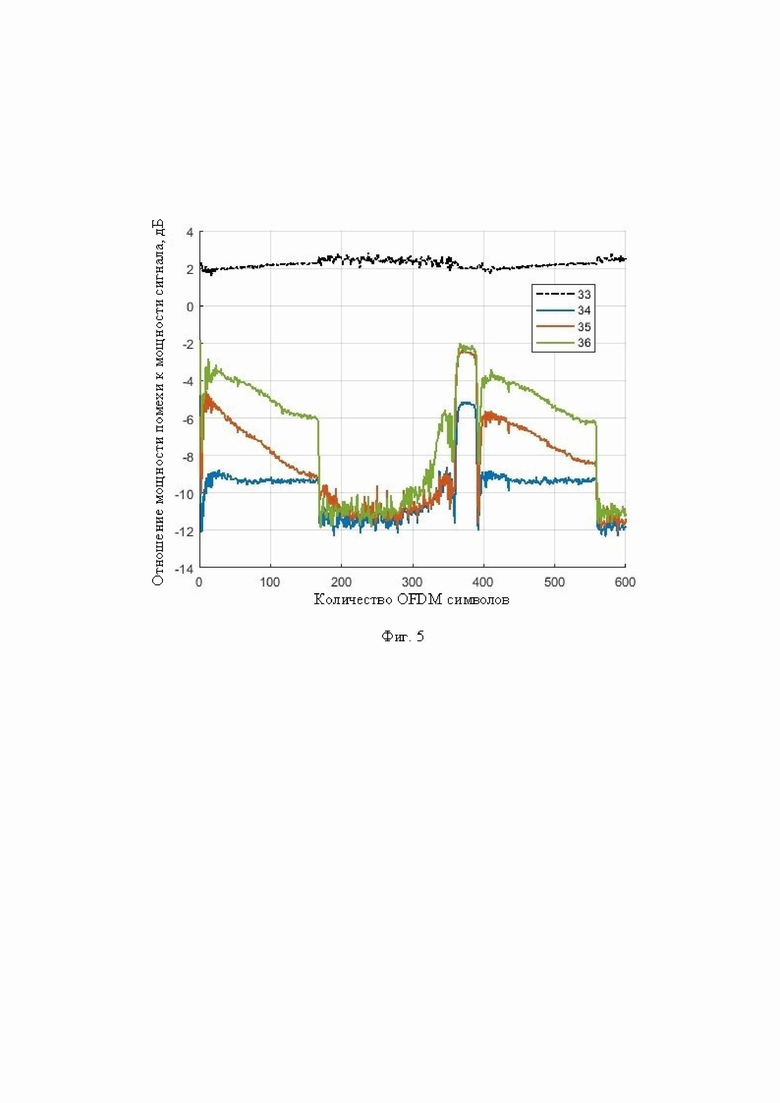
На фигуре 5 представлено сравнение отношения мощности сигнала помехи к мощности полезного сигнала на входе и выходе адаптивного фильтра при использовании алгоритмов цифровой компенсации: 33 – без фильтрации; 34 – предложенный способ; 35 – способ прототип; 36 – способ аналог.
Предлагаемый способ позволяет повысить уровень компенсации системной помехи в условиях периодических помех, вызванных влиянием переменной составляющей силовой цепи питания, за счет использования предвычисленных весовых коэффициентов с периодической реинициализацией фильтра. Преимущество данного способа заключается в том, что уровень подавления системной помехи в условиях влияния переменной составляющей силовой цепи питания возрастает на 5 дБ (фиг.5), а за счет быстрой сходимости алгоритма, период, в течение которого осуществляется вычисление весовых коэффициентов фильтра, достаточно мал.
Использованные источники
1. Mahbub U.; Acharjee P. P.; Fattah S. A. A time domain approach of acoustic echo cancellation based on particle swarm optimization. International Conference on Electrical and Computer Engineering (ICECE 2010). IEEE, 2010, pp. 518-521.
2. Джиган В. Адаптивная фильтрация сигналов: теория и алгоритмы, 2021, с. 52.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ РЕЖЕКЦИИ ПОМЕХ В АППАРАТУРЕ ПОТРЕБИТЕЛЕЙ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2023 |
|
RU2804922C1 |
| Способ для полнодуплексной системы предварительного кодирования с многоканальным входом и многоканальным выходом (MIMO) | 2023 |
|
RU2804839C1 |
| Цифровой фильтр для нестационарных сигналов | 2020 |
|
RU2747199C1 |
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ ДАННЫХ В СИСТЕМЕ СВЯЗИ С МНОЖЕСТВОМ ВХОДОВ И МНОЖЕСТВОМ ВЫХОДОВ (MIMO) С ИСПОЛЬЗОВАНИЕМ ИНФОРМАЦИИ О СОСТОЯНИИ КАНАЛА | 2002 |
|
RU2292116C2 |
| Адаптивное фильтрующее устройство | 1980 |
|
SU926762A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРИЕМА ДАННЫХ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ, ИСПОЛЬЗУЮЩЕЙ СХЕМУ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2313907C2 |
| Адаптивное фильтрующее устройство | 1987 |
|
SU1436271A1 |
| Устройство пространственной селекции сигналов с компенсацией преднамеренных помех | 2018 |
|
RU2677931C1 |
| СПОСОБ КВАЗИКОГЕРЕНТНОГО ПРИЕМА СИГНАЛА, УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, И БЛОК ОБРАБОТКИ СИГНАЛА ОДНОЛУЧЕВОГО КВАЗИКОГЕРЕНТНОГО ПРИЕМНИКА | 2000 |
|
RU2187209C2 |
| СПОСОБ АДАПТИВНОЙ МОДУЛЯЦИИ ДЛЯ СИСТЕМ СВЯЗИ, ИСПОЛЬЗУЮЩИХ СИГНАЛЫ С ОРТОГОНАЛЬНЫМ ЧАСТОТНЫМ МУЛЬТИПЛЕКСИРОВАНИЕМ | 2020 |
|
RU2739940C1 |
Изобретение относится к радиотехнике. Технический результат состоит в повышении уровня компенсации системной помехи в условиях периодических помех, вызванных влиянием переменной составляющей силовой цепи питания. Для этого способ компенсации системной помехи в полнодуплексном режиме передачи данных характеризуется тем, что в него дополнительно введены операция задержки второго входного сигнала, операция задержки первого входного сигнала, участвующего в последующем расчете итоговой ошибки, расчет итоговой ошибки, результатом которой является восстановленный неизвестный сигнал, процедура сохранения рассчитанного вектора весовых коэффициентов фильтра, посредством которого осуществляется фильтрация задержанного второго входного сигнала, операция сброса для реинициализации вычисляемого вектора весовых коэффициентов, обратной автокорреляционной матрицы и вектора коэффициентов Калмана, выполняемая через интервал времени, соответствующий времени когерентности канала. 5 ил., 1 табл.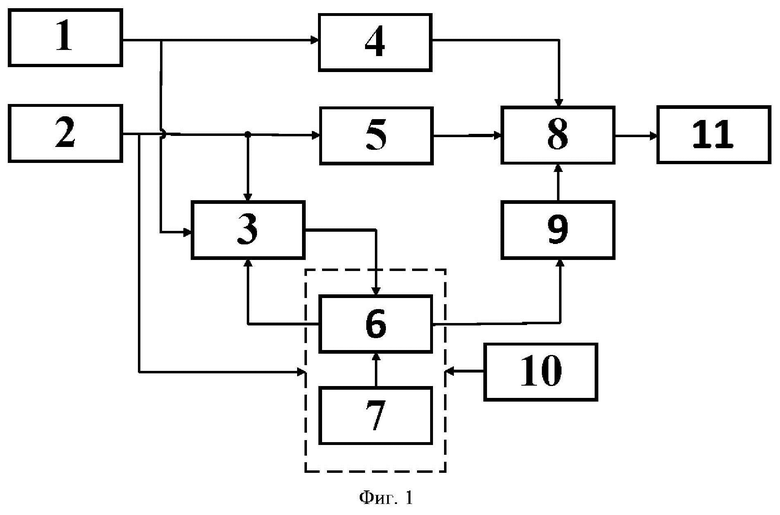
Способ компенсации системной помехи в полнодуплексном режиме передачи данных, осуществляемый с помощью цифрового фильтра, подстройка коэффициентов которого производится посредством адаптивного алгоритма, основанного на минимизации взвешенной ошибки наименьших квадратов, включающий прием отсчетов суммы известного сигнала помехи и неизвестного полезного сигнала из канала, представляющих собой первый входной сигнал, а также заранее сохраненные отсчеты передаваемого известного помехового сигнала, представляющих собой второй входной сигнал, фильтрацию второго входного сигнала с помощью изначально заданных весовых коэффициентов фильтра, инициализация которых происходит в нулевых состояниях, вычисление коэффициентов Калмана и обратной автокорреляционной матрицы с помощью второго входного сигнала, вычисление предварительной ошибки с помощью первого входного сигнала и сигнала, полученного в результате фильтрации второго входного сигнала, а также расчет вектора весовых коэффициентов, участвующего в последующих итерациях фильтрации второго входного сигнала на основе вычисленных коэффициентов Калмана и предварительной ошибки, отличающийся тем, что дополнительно введены операция задержки второго входного сигнала, операция задержки первого входного сигнала, участвующего в последующем расчете итоговой ошибки, расчет итоговой ошибки, результатом которой является восстановленный неизвестный сигнал, процедура сохранения рассчитанного вектора весовых коэффициентов фильтра, посредством которого осуществляется фильтрация задержанного второго входного сигнала, операция сброса для реинициализации вычисляемого вектора весовых коэффициентов, обратной автокорреляционной матрицы и вектора коэффициентов Калмана, выполняемая через интервал времени, соответствующий времени когерентности канала.
| ПРИЕМНИК ПРЯМОГО ПРЕОБРАЗОВАНИЯ С ЦИФРОВОЙ КОМПЕНСАЦИЕЙ | 1995 |
|
RU2146416C1 |
| СПОСОБ ПОЛУЧЕНИЯ 1-МЕТИЛ-4-ДИЭТИЛКАРБАМИЛПИПЕРАЗИНАСОЛЕЙ | 0 |
|
SU185926A1 |
| МАШИНА ДЛЯ ВКЛАДЫВАНИЯ ГЕРМЕТИЗИРУЮЩИХ | 0 |
|
SU170314A1 |
| EP 4068802 A1, 05.10.2022 | |||
| CN 101615905 A, 30.12.2009. | |||
