Настоящее изобретение относится к области гидроакустики и может быть использовано при решении задач обработки сигнала шумоизлучения объекта в гидроакустических системах.
Известны методы обработки сигналов шумоизлучения объектов для задач обнаружения в гидроакустике, основанные на сравнении уровня принятого сигнала с уровнем помехи [Евтютов А.П., Колесников А.Е., Корепин Е.А. Справочник по гидроакустике // Л.: Судостроение. - 1988. - С. 26., Бурдик B.C. Анализ гидроакустических систем. - Судостроение, 1988. - С. 364]. Рассматриваемые методы содержат прием временной реализации сигнала антенной, набор временных отсчетов фиксированной длительностью, измерение спектров набранной временной реализации, накопление спектров, измерение энергии накопленного спектра и сравнение измеренной энергии с порогом, определенным по помехе, измеренной в отсутствии сигнала. При изменении уровня сигнала и отношения сигнал\помеха принимают решение о наличии маневра.
Аналогичный метод используется при цифровой обработке гидроакустических сигналов, который содержит прием сигнала антенной усиление, полосовую фильтрацию, аналогово-цифровое преобразование сигнала, предварительную пространственную обработку, спектральную обработку на основе БПФ (быстрое преобразование Фурье), накопление энергетических спектров и представление на дисплей [Оппенгейм Э. Применение цифровой обработки сигналов // Издательство «Мир. - 1980]. В существующих методах обработки отношение сигнал/помеха увеличивается за счет накопления спектров.
Недостатком этих способов является невозможность автоматического обнаружения источника при кратковременном изменении параметров процесса.
Предполагается, что за время накопления спектров динамика собственного движения и динамика движения шумящего объекта не изменяется и входной процесс на входе приемного устройства является стационарным. Поэтому временная реализация на входе остается постоянной и спектральный состав набранных временных реализаций не изменяется, что позволяет накапливать спектры шумоизлучение сигнала и увеличивать отношение сигнал/помеха, поскольку спектральный состав помехи изменяется в каждом временном наборе. Как правило, время накопления спектров выбирается из условия обеспечения требуемого отношения сигнал/помеха и может достигать значительной величины при обнаружении слабых сигналов. Поэтому при большом накоплении сложно обнаружить изменение стационарности, обусловленной кратковременным изменением параметров источника.
Известен способ обработки сигнала шумоизлучения, в котором производится определение маневра шумящего объекта [Консон А.Д., Тимошенков В.Г. Патенту РФ №2634786 от 03.11.2017. Способ определения маневра шумящего объекта. МПК G01S 3/80].
Способ, содержит прием временной последовательности сигнала шумоизлучения, дискретизацию принятой временной последовательности, набор отсчетов временной последовательности спектральный анализ на основе быстрого преобразования Фурье, последовательное накопление энергетических спектров и представление результата на индикатор, в котором обработку сигнала производят в высокочастотном диапазоне принятого сигнала шумоизлучения при минимальном времени накоплении, запоминают первый накопленный энергетический спектр первых наборов временной последовательности, определяют энергию сигнала шумоизлучения как сумму амплитуд спектральных составляющих каждого набора, определяют коэффициент корреляции между энергетическим спектром первого набора и энергетическим спектром каждого следующего набора, запоминают коэффициенты корреляции при каждом очередном накоплении, сравнивают коэффициенты корреляции и при увеличении коэффициента корреляции и снижении уровня энергии сигнала в последовательных накопленных спектрах принимают решение, что цель снизила скорость движения, при уменьшении коэффициента корреляции и при увеличении энергии сигнала шумоизлучения принимают решение, что цель увеличила скорость движения, а если уровень энергии сигнала не изменился, а коэффициента корреляции уменьшился, то принимают решение, что цель изменила направление движения.
Недостатком известного технического решения является то, что он эффективен при изменении медленных скоростных режимов движения. При измерении быстрого процесса, таких как изменения глубины подводной лодки с использованием быстрой продувки балластных цистерн, или старт ракет с береговой базы или с любого носителя, спектр шумоизлучения смещается в строну низких частот и алгоритм не сможет мгновенно отработать, поскольку высокочастотная часть спектра шумоизлучения остается без существенных изменений.
Задачей изобретения является повышение достоверности обработки принятого сигнала шумоизлучения и автоматическое определение момента изменения стационарности за счет кратковременного изменения процесса шумоизлучения, вызванного неизвестными факторами.
Для решения поставленной задачи в способе обработки сигнала шумоизлучения объекта, содержащий прием временной последовательности сигнала шумоизлучения антенной со статическим веером характеристик направленности, дискретизацию принятой временной последовательности, набор отсчетов временной последовательности по всем характеристикам направленности, представление результата на индикатор введены новые признаки, а именно: длительность набор временной последовательности сигнала определяют верхней частотой низкого диапазона частот, характерного для случайных процессов, обработку сигнала производят в низкочастотном диапазоне, по каждому временному набору определяют среднее значение амплитуды Аср всех сигналов всех пространственных каналов, определяют порог равный КАср, определяют каналы, в которых произошло превышение порога, и при числе каналов больше 4-х, определяют коэффициенты корреляции между временными наборами соседних пространственных каналов из числа тех, в которых произошло превышение порога, и между последовательными временными реализациями каждого пространственного канала, и при коэффициенте корреляции меньше 0,5, фиксируют время измерения первого коэффициента корреляции меньшего 0,5, как начало нестационарного процесса Тн,, при уменьшении сигнала ниже КАср запоминают время окончания нестационарного процесса Тк, определяют интервал времени ΔТ=Тк-Тн и принимают автоматическое решение, что имеет место экстренное изменение стационарности обстановки в момент времени Тн при ΔT>Тпор, где Тпор интервал времени определяемый для конкретных источников нестационарных кратковременных процессов шумоизлучения, а К уточняется в процессе испытаний.
Техническим результатом предлагаемого изобретения является возможность определения изменения стационарности шумового процесса на входе приемного устройства при приеме сигнала шумоизлучения, что приводит к автоматическому принятию решения о наличии нестационарного кратковременного процесса.
Сущность предлагаемого технического решения заключается в следующем. Известно, что в режиме шумопеленгования осуществляется стандартная процедура обнаружения источника шумоизлучения подводной лодки или надводного корабля. Как правило, эти источники являются подвижными источниками шумоизлучения, которые формируют стационарный шум с конкретными техническими характеристиками. Однако имеются другие не стандартные ситуации, которые возникают при стандартной текущей работе. Это происходит при применении неизвестным объектом, например, старта ракетного оружия или при резком всплытии подводной лодки. Все эти процессы формируют кратковременное низкочастотное излучение, которое в силу особенностей стандартной обработки, направленной на обнаружения стационарного процесса, не может быть обнаружено. Как правило, все эти процессы являются кратковременными и, случайными, находятся в низкочастотном звуковом диапазоне и обладают большой мощностью, существенно превышающей шумоизлучение реальных надводных и подводных кораблей. Поскольку эти процессы случайные и кратковременные, то спектральные методы обработки не всегда могут обеспечить достоверное автоматическое обнаружение таких кратковременных непредвиденных случайных сигналов.
В основу предлагаемого способа положены известные особенности, такими особенностями является наличие сигнала большой амплитуды в низкочастотном диапазоне и случайность изменения процесса во времени. Кроме того, формируется сигнал низкочастотного спектра за короткий временной промежуток, амплитуда которого случайно изменяются по величине и по спектру в процессе формирования и имеет большой уровень.
Как правило, система приема сигналов шумоизлучения работает в режиме накопления последовательных спектров, поэтому кратковременное изменение процессов на входе, которое отображается на индикаторе, не всегда может быть замечено оператором и достоверно им интерпретировано. Кроме того, в процессе работы оператор наблюдает отображения сигналов на индикаторе, который постоянно изменяется и забит сигналами шумоизлучения надводных кораблей и других источников, которые расположены на различных дистанциях и направлениях. В этой ситуации предлагается к существующей системе обнаружения шумящих источников с использованием спектральной обработки, ввести дополнительную процедуру измерения характеристик временного процесса на входе.
Известно, что ширина диаграммы направленности приемной антенны зависит от отношения верхней и нижней частоты принимаемого сигналов. Чем ниже частота принимаемого сигнала, тем шире характеристика направленности. [Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустики // Л.: Судостроение. - 1981]. Для низкочастотного спектра ширина характеристик направленности расширяется. Кроме того, большой уровень шумоизлучения кратковременного по длительности сигнала будет приниматься соседними характеристиками направленности по боковым лепесткам характеристики направленности. Поэтому сигнал будет обнаружен по многим характеристикам направленности, что существенно отличает его от шумоизлучения реальных шумящих объектов. Такой сигнал не требует сложной спектральной обработки и борьбы с помехой с использованием накопления информации по времени. Сам процесс достаточно активно изменяется во времени по мощности, частоте и по пространству, поэтому предлагается последовательность операций, которые позволят выделить сигнал измерить его признаки и представить автоматическое решение оператору.
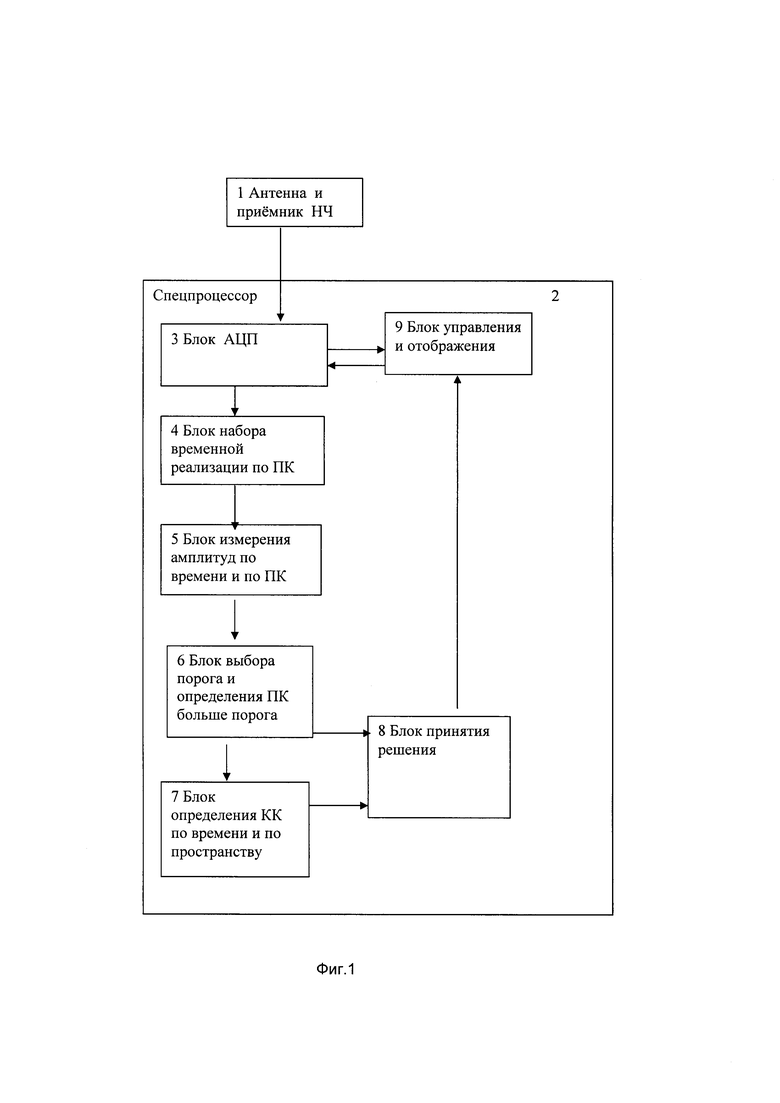
Сущность изобретения поясняется фиг. 1, на которой приведена блок схема устройства, реализующая предлагаемый способ.
Устройство содержит антенну и приемник низкой частоты 1, которая соединена со спецпроцессором обработки 2, в состав которого входят последовательно соединенные блок 3 АЦП, блок 4 набора временных реализаций по пространственным каналам ПК, блок 5 измерения амплитуд по времени и по пространственным каналам, блок 6 выбора порога и определения каналов, где порог превышен, блок 7 определения коэффициентов корреляции (КК) по времени и по пространству. Блок 7 через второй вход блока 8 принятия решения соединен с блоком 9 управления и отображения. Второй выход блока 6 соединен со вторым входом блока 8, а второй выход блока 3 со вторым входом блока 9.
Антенна и приемник НЧ 1 являются известными устройствами, которые используются во всех станциях шумопеленгования. Спецпроцессор 2 является известным устройством, который используется в современной гидроакустической аппаратуре для приема сигнала, преобразования в цифровой вид и обработку специальными цифровыми процессорами на основе разработанных алгоритмов [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. - Наука, 2004].
Работа системы, реализующий предлагаемый способ, происходит следующим образом. Сигнал шумоизлучения принимается антенной 1, преобразуется в цифровой вид в блоке 3 спецпроцессора 2. Антенна 1 работает в дежурном штатном режиме и принимает все сигналы статическим веером характеристик направленности в низком частотном диапазоне. С выхода блока 3 временные сигнал поступает в блок 4 набора временной реализации по всем пространственным каналам. В блоке 5 производится измерение амплитуд по всем пространственным каналам каждого последующего временного интервала и передача их в блок 6, где измеряется среднее значение амплитуд всех принятых сигналов шумоизлучения по всем характеристикам направленности и выбирается порог КАср, значительно превышающий среднее значение шумящих объектов. Обычно коэффициент К порядка 10, но величина может изменяться в зависимости от дистанции и характера процесса, поэтому он может быть уточнен по результатам конкретных испытаний. По этому порогу определяются пространственные каналы, которые превышают выбранный порог. Как правило, число пространственных каналов, которые принадлежат реальным объектам, не превышает 4, что может быть выбрано в качестве порога. Временные реализации этих пространственных каналов передаются в блок 7, где определяется коэффициент корреляции по пространству между временными реализациями и по последовательным временным реализациям каждого выделенного пространственного канала. Таким образом, в блок 8 принятия решения поступает информация о числе пространственных каналов, в которых произошло превышение порога и коэффициенты корреляции по пространству и по времени. В блоке 8 определяется время начала Тн одновременной выработки поступивших сигналов и время окончания Тк при уменьшении амплитуды сигналов меньше КАср. Определяется временная протяженность процесса ΔТ=Тк-Тн, и при ΔT>Тпор принимают решение о наличии кратковременного нестационарного шумового процесса. Блок 8 соединен с блоком 9 управления и отображения. В блок 9 из блока 3 поступает в реальном масштабе времени в яркостном виде последовательность временных отсчетов от всех источников шумоизлучения. При наличии решения о нестационарном кратковременном шумовом процессе на общем индикаторе будет высвечиваться выработанное решение.
Таким образом, предлагаемая процедура измерения позволит автоматически определить наличие кратковременного нестационарного шумового процесса и измерить его параметры на фоне обработки шумоизлучения реальных объектов, не прерывая процедуру слежения рабочего процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки сигнала шумоизлучения цели | 2022 |
|
RU2776442C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАНЕВРА ШУМЯЩЕГО ОБЪЕКТА | 2016 |
|
RU2634786C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА ШУМОИЗЛУЧЕНИЯ ОБЪЕКТА | 2014 |
|
RU2572219C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| Способ обнаружения шумящих в море объектов | 2021 |
|
RU2780408C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2733938C1 |
| Способ обработки сигнала шумоизлучения | 2022 |
|
RU2799118C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЕЙ И ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОСТИ ШУМОВ МОРСКОГО НЕФТЕГАЗОВОГО КОМПЛЕКСА | 2011 |
|
RU2480781C2 |
| Способ и устройство обнаружения шумящих в море объектов бортовой антенной | 2019 |
|
RU2723145C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано при решении задач обработки сигнала шумоизлучения объекта в гидроакустических системах. Сущность: в способе обработки сигнала шумоизлучения объекта, содержащем прием временной последовательности сигнала шумоизлучения антенной со статическим веером характеристик направленности, дискретизацию принятой временной последовательности, набор отсчетов временной последовательности по всем характеристикам направленности, представление результата на индикатор, в котором длительность набора временной последовательности сигнала определяют верхней частотой, обработку сигнала производят в низкочастотном диапазоне, по каждому временному набору определяют среднее значение амплитуды Аср всех сигналов всех пространственных каналов, определяют порог, равный КАср, определяют каналы, в которых произошло превышение порога, и при числе каналов больше 4-х определяют коэффициенты корреляции между временными наборами соседних пространственных каналов из числа тех, в которых произошло превышение порога, и между последовательными временными реализациями каждого пространственного канала, и при коэффициенте корреляции меньше 0,5, фиксируют время измерения коэффициента корреляции как начало нестационарного процесса Тн, при уменьшении сигнала ниже КАср запоминают время окончания нестационарного процесса Тк, определяют интервал времени ΔТ=Тк-Тн и принимают решение, что имеет место экстренное изменение стационарности обстановки в момент времени Тн при ΔT>Тпор, где Тпор - интервал времени, определяемый для конкретных источников нестационарных кратковременных процессов шумоизлучения. Технический результат: определение изменения стационарности шумового процесса на входе приемного устройства при приеме сигнала шумоизлучения. 1 ил.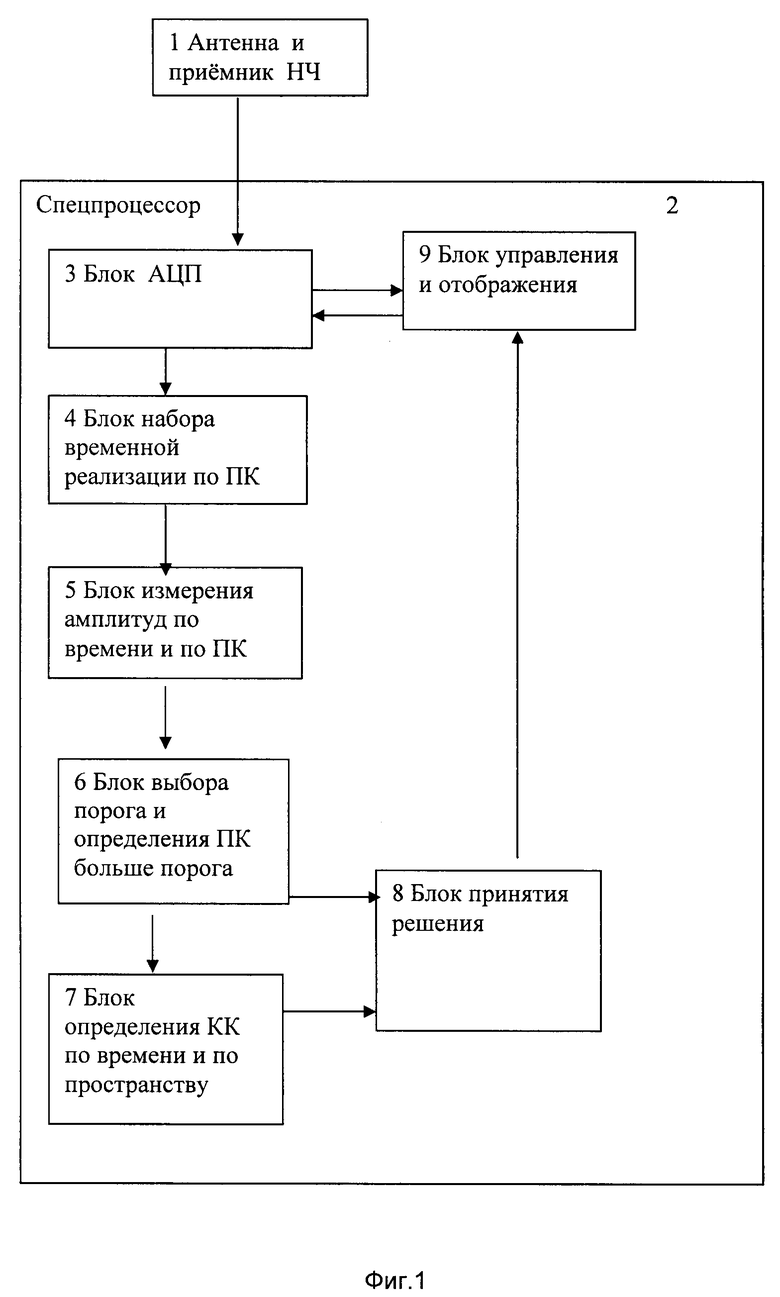
Способ обработки сигнала шумоизлучения объекта, содержащий прием временной последовательности сигнала шумоизлучения антенной со статическим веером характеристик направленности, дискретизацию принятой временной последовательности, набор отсчетов временной последовательности по всем характеристикам направленности, представление результата на индикатор, введены новые признаки, а именно: длительность набора временной последовательности сигнала определяют верхней частотой, обработку сигнала производят в низкочастотном диапазоне, по каждому временному набору определяют среднее значение амплитуды Аср всех сигналов всех пространственных каналов, определяют порог, равный КАср, определяют каналы, в которых произошло превышение порога, и при числе каналов больше 4-х определяют коэффициенты корреляции между временными наборами соседних пространственных каналов из числа тех, в которых произошло превышение порога, и между последовательными временными реализациями каждого пространственного канала и при коэффициенте корреляции меньше 0,5 фиксируют время измерения этих коэффициентов корреляций как начало нестационарного процесса Тн, при уменьшении сигнала ниже КАср запоминают время окончания нестационарного процесса Тк, определяют интервал времени ΔТ=Тк-Тн и принимают решение, что имеет место экстренное изменение стационарности обстановки в момент времени Тн при ΔT>Тпор, где Тпор - интервал времени, определяемый для конкретных источников нестационарных кратковременных процессов шумоизлучения, а К уточняется в процессе испытаний.
| Способ обнаружения подводного источника широкополосного шума | 2022 |
|
RU2787951C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖЕНИЯ ПОДВОДНОГО ИСТОЧНИКА ШИРОКОПОЛОСНОГО ШУМА | 2021 |
|
RU2786599C1 |
| Способ определения изменения скорости движения шумящего объекта | 2020 |
|
RU2757075C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2754602C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2015 |
|
RU2603886C1 |
| US 7453769 B2, 18.11.2008 | |||
| Способ обработки сигнала шумоизлучения цели | 2022 |
|
RU2776442C1 |
| Способ классификации морских объектов по уровню шума в источнике | 2021 |
|
RU2767001C1 |

