Изобретение относится к области беспилотных авиационных устройств, использующих технологию вертикального взлета и посадки, предназначенных для аэрофотографирования и видеонаблюдения с возможностью передачи информации, получаемой бортовыми датчиками, на станцию управления в режиме реального времени.
Известна несущая рама складной конструкции для привязного/автономного беспилотного летательного аппарата на базе квадрокоптера (патент РФ 186777, опубл. 23.05.2018), которая содержит в своей конструкции горизонтальные лопастные движители с бесколлекторными двигателями, прямоугольную раму складной конструкции из композиционных материалов, установленную с возможностью крепления к ней различных типов полезной нагрузки.
Недостаток состоит в расположении бесколлекторных двигателей и винтов по краям, в углах рамы так, что в случае столкновения лопастей летательного аппарата с препятствиями, лопасти сломаются, аппарат упадет, и его рама и внутренние компоненты сломаются.
Известен беспилотный летательный аппарат вертикального взлета и посадки (патент РФ 157424, опубл. 10.12.2015), который содержит несущий каркас и электродвигатели с воздушными винтами, связанные с аккумуляторной батареей, на несущем каркасе в вершинах воображаемого равностороннего треугольника жестко зафиксированы, по меньшей мере, три несущих системы «винт в кольце», с установленными в них двумя соосно-несущими воздушными винтами противоположного вращения, с электронной регулировкой числа оборотов, а два из них с возможностью поворота из горизонтальной плоскости в вертикальную и обратно, отличающийся тем, что третий «винт в кольце» установлен вертикально, перпендикулярно плоскости, проходящей через продольную ось симметрии беспилотного летательного аппарата, и размещен в хвостовой части фюзеляжа.
Недостаток состоит в низкой прочности конструкции рамы. Рама состоит из трех лучей, соединенных в одной точке, без дополнительных усилений. При такой конструкции, центр рамы подвержен повреждению в случае столкновения. Аппарат является неразборным, что усложняет эксплуатацию.
Известен переносной беспилотный летательный аппарат многоцелевого назначения (патент РФ 2632779, опубл. 09.10.2017), который содержит несущую раму с закрепленными на ней винтовыми движителями, аккумуляторную батарею, маршрутное вычислительное устройство с инерциальным измерительным устройством, подвесы для крепления полезной нагрузки и имеющий возможность управления с мобильного пульта, отличающийся тем, что несущая рама аппарата выполнена из двух пластин, расположенных друг над другом, которые соединены посредством осей, на которых между пластинами установлены защелки для фиксации штанг в рабочем положении, двух симметричных шарнирных опор складывающихся шасси и расположенных между шарнирных опор четырех шарниров.
Недостаток состоит в расположении бесколлекторных двигателей и винтов по краям, в углах рамы так, что в случае столкновения лопастей летательного аппарата с препятствиями, лопасти сломаются, аппарат упадет, и его рама и внутренние компоненты сломаются.
Известен складной коптер (патент РФ 188461, опубл. 29.12.2018), который содержит основание из двух параллельных пластин прямоугольной формы, в пространстве между пластинами основания на вертикальных осях установлены четыре вращающиеся консоли, на внешних концах консолей закреплены винтомоторные узлы, отличающийся тем, что пластины соединены между собой перемычками, две пары осей размещены в соосных сквозных отверстиях, выполненных в пластинах основания симметрично относительно продольной оси основания, проходящей посередине между длинных сторон пластин.
Недостаток состоит расположении бесколлекторных двигателей и винтов по краям, в углах рамы так, что в случае столкновения лопастей летательного аппарата с препятствиями, лопасти сломаются, аппарат упадет, и его рама и внутренние компоненты сломаются. Также недостаток заключается в не равномерном распределении нагрузки на несущую раму в случае неудачного приземления, опрокидывания аппарата или его столкновения с препятствием, что снижает жесткость конструкции и увеличивает вероятность поломки.
Известен беспилотный летательный аппарат для полета в топках котлов теплоэлектростанций (патент РФ 211527, опубл. 06.08.2021) принятый за прототип, содержащий корпус, состоящий из верхней и нижней частей, жестко соединенных с корпусом четырех лучей с одним электромотором на конце каждого луча с несущим винтом на моторе, автопилота, четырех регуляторов оборотов, камеры высокого разрешения, приемника радиоуправления и антенны приема-передачи сигнала, связанных с аккумуляторной батареей, отличающийся тем, что содержит расположенное на борту оборудование: - для обнаружения препятствий в горизонтальной плоскости полета используются четыре инфракрасных дальномера, два из них направленных по фронту, два по бокам; лазерный дальномер, направленный вниз к подстилающей поверхности; навигационную камеру с широким углом обзора; инфракрасную камеру глубины; бортовой вычислитель; блок фронтальной подсветки; что позволяет беспилотному летательному аппарату совершать полет по заранее заданной программе, в соответствии с разработанным алгоритмом, внутри закрытого объекта - топки котла тепловой электростанции.
Недостаток состоит расположении бесколлекторных двигателей и винтов по краям, в углах рамы так, что в случае столкновения лопастей летательного аппарата с препятствиями, лопасти сломаются, аппарат упадет, и его рама и внутренние компоненты сломаются. Также недостаток заключается в не равномерном распределении нагрузки на несущую раму в случае неудачного приземления, опрокидывания аппарата или его столкновения с препятствием, что снижает жесткость конструкции и увеличивает вероятность поломки. Также аппарат является неразборным, что усложняет эксплуатацию.
Техническим результатом является повышение надежности устройства.
Технический результат достигается тем, что беспилотный летательный аппарат, содержащий опорную конструкцию из не менее шести стержней, расположенных попарно из двух параллельно расположенных стержней в каждой паре, одна пара из которых составляет несущие стержни (10), расположенные в горизонтальной плоскости, а две другие пары (11) расположены перпендикулярно друг другу, одна из них в горизонтальной плоскости, а другая в вертикальной, при этом на концах всех стержней установлены крепления (11) для установки гибких соединителей (8), выполненных одинаковой длины и предназначенных для соединения всех концов стержней (9,10) в единую конструкцию таким образом, чтобы каждый конец стержня имел не менее трех гибких соединений (8) с концами других стержней (9,10), расположенных рядом в пределах длины гибкого соединителя, при этом на несущих стержнях (10) закреплены с возможностью съема не менее двух электродвигателей (3) с пропеллерами (4), а под ними – регуляторы оборотов (2), при этом между электродвигателями (3) установлена с возможностью съема камера (7), которая соединена с блоком передачи видео сигнала (16), а под ней аккумуляторная батарея (1) и система управления (5), состоящая из последовательно установленных микроконтроллера (12), датчика наклона (13) и приемника радиоуправления (14).
Беспилотный летательный аппарат поясняется следующими фигурами:
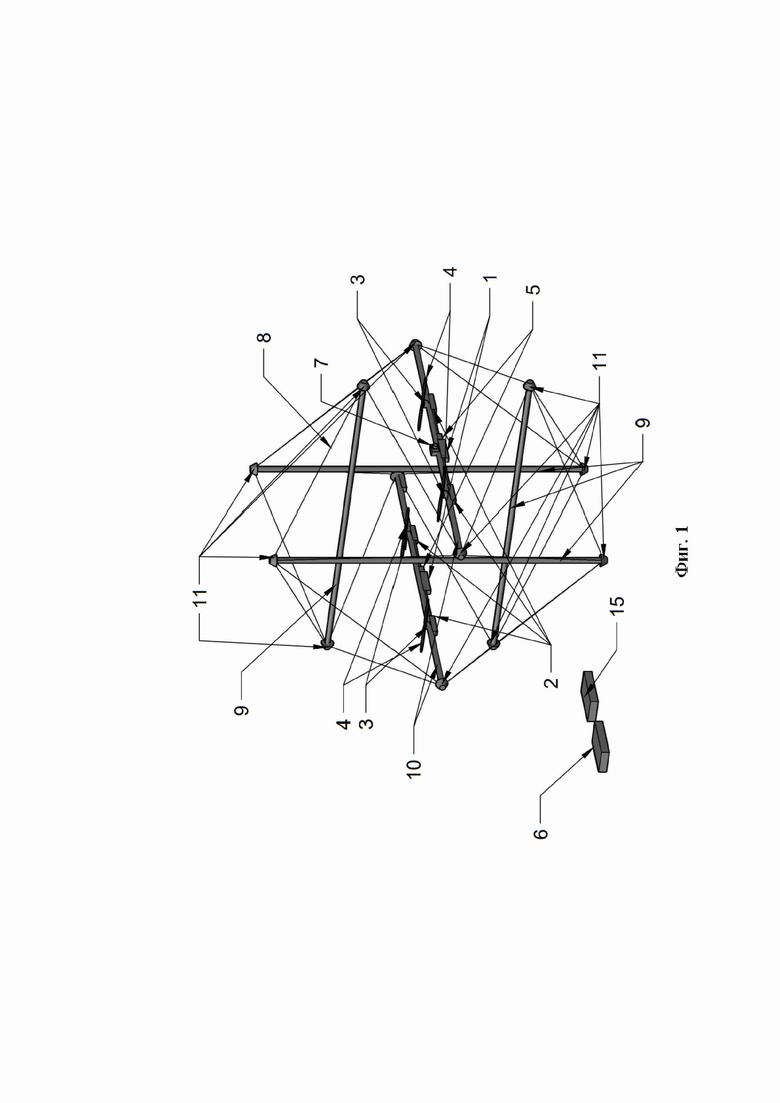
фиг. 1 – 3D модель устройства;
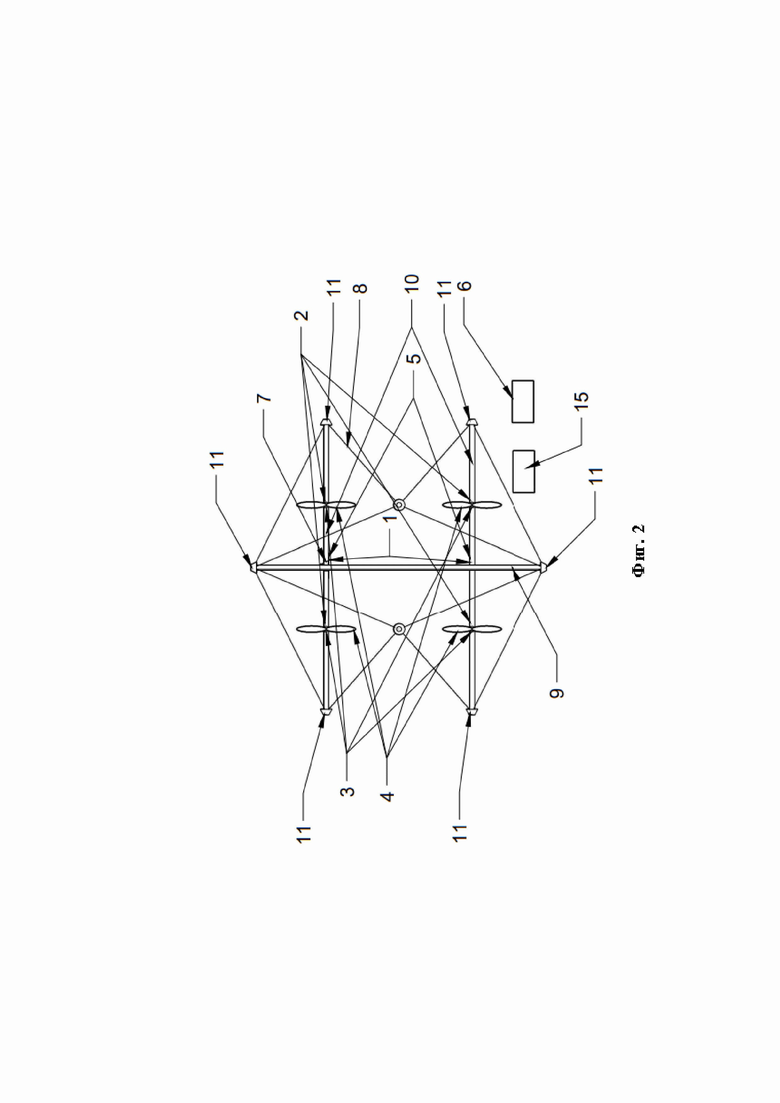
фиг. 2 – вид сверху;
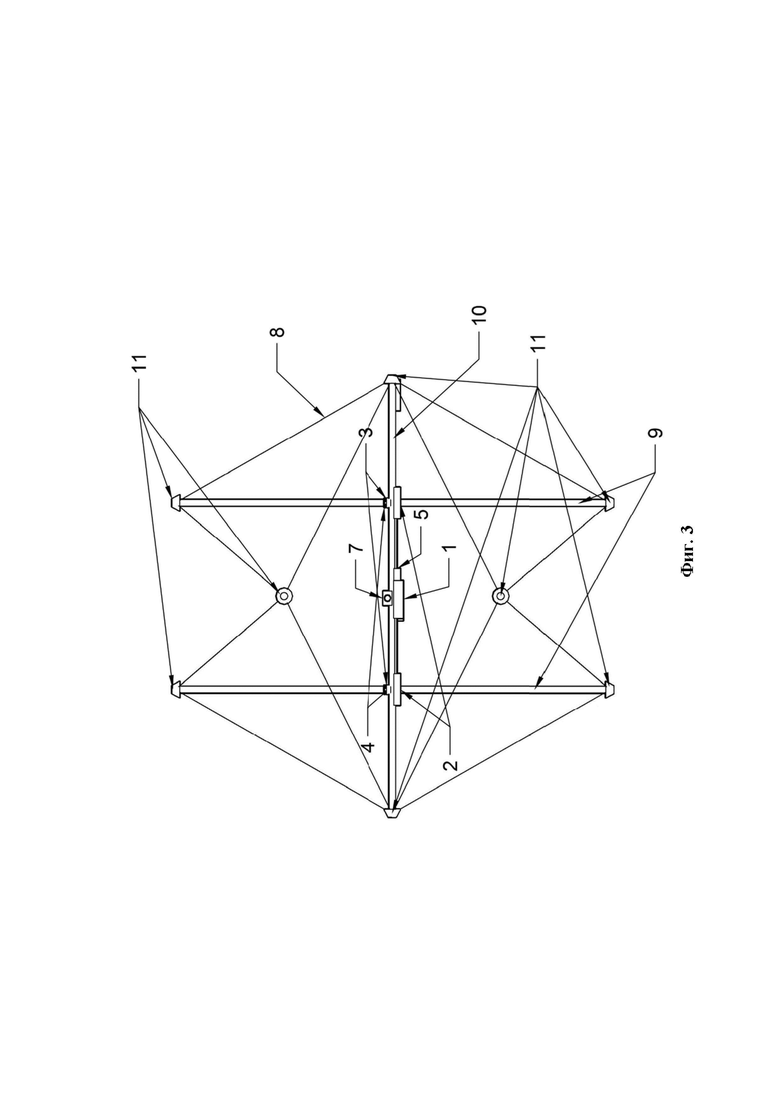
фиг. 3 – вид спереди;
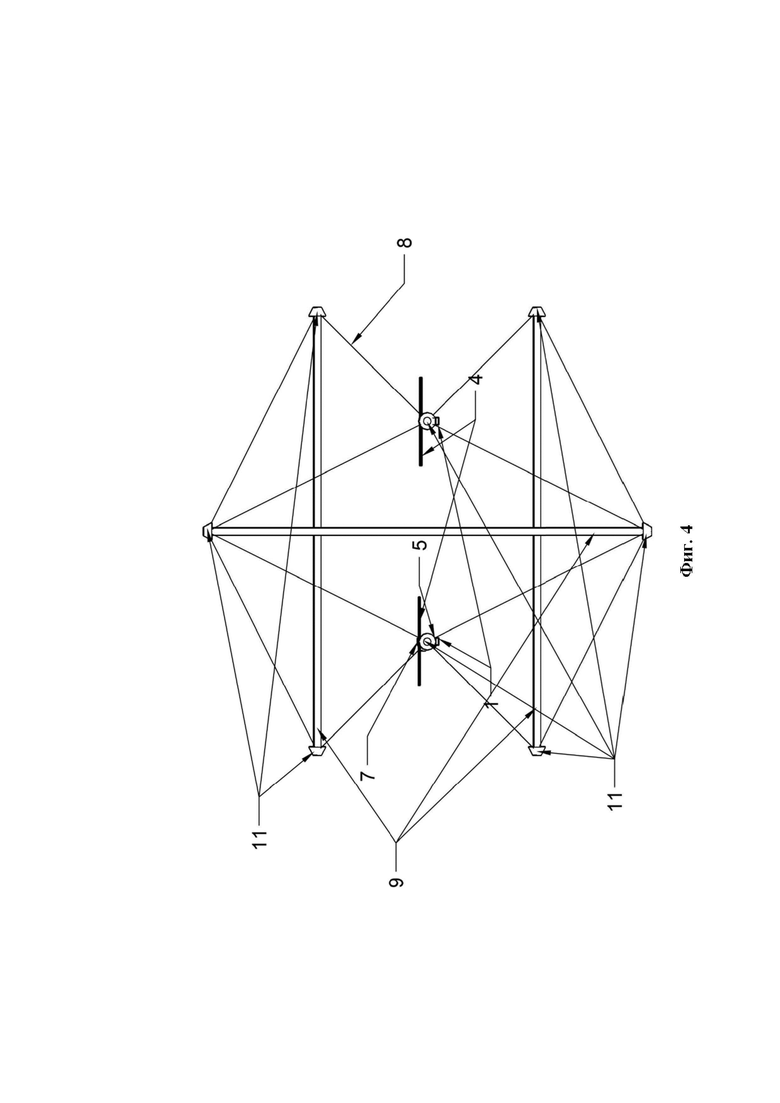
фиг. 4 – вид сбоку;
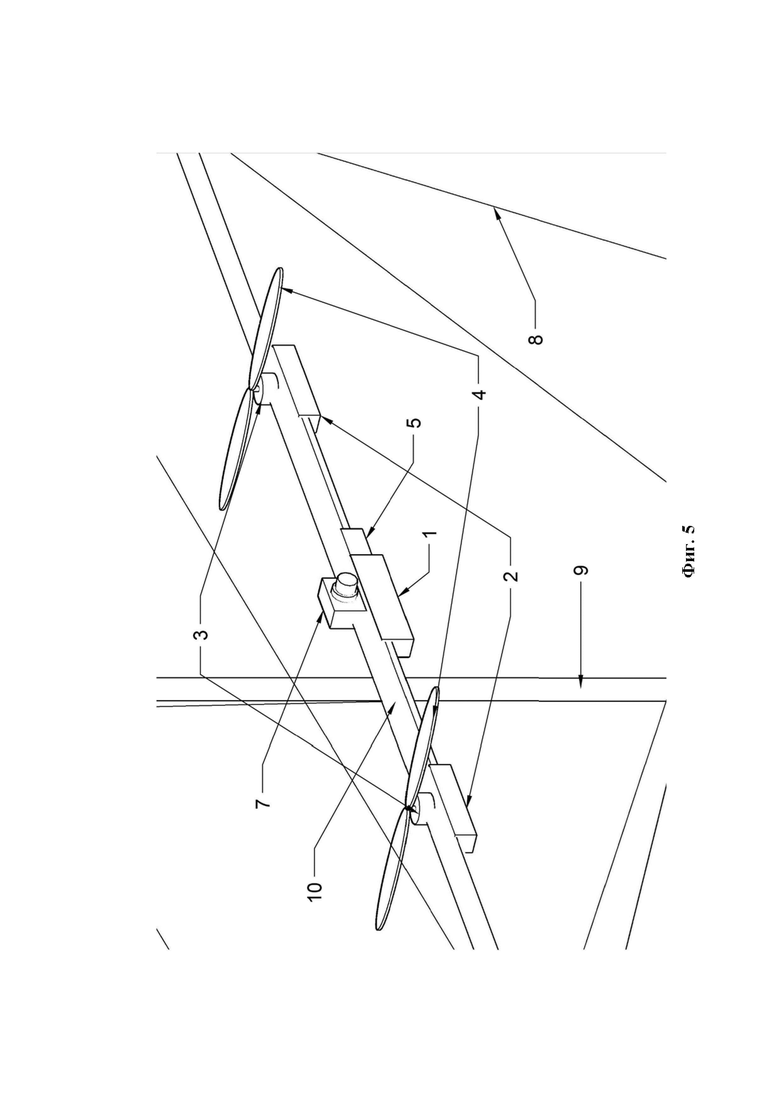
фиг. 5 – вид опорного стержня;
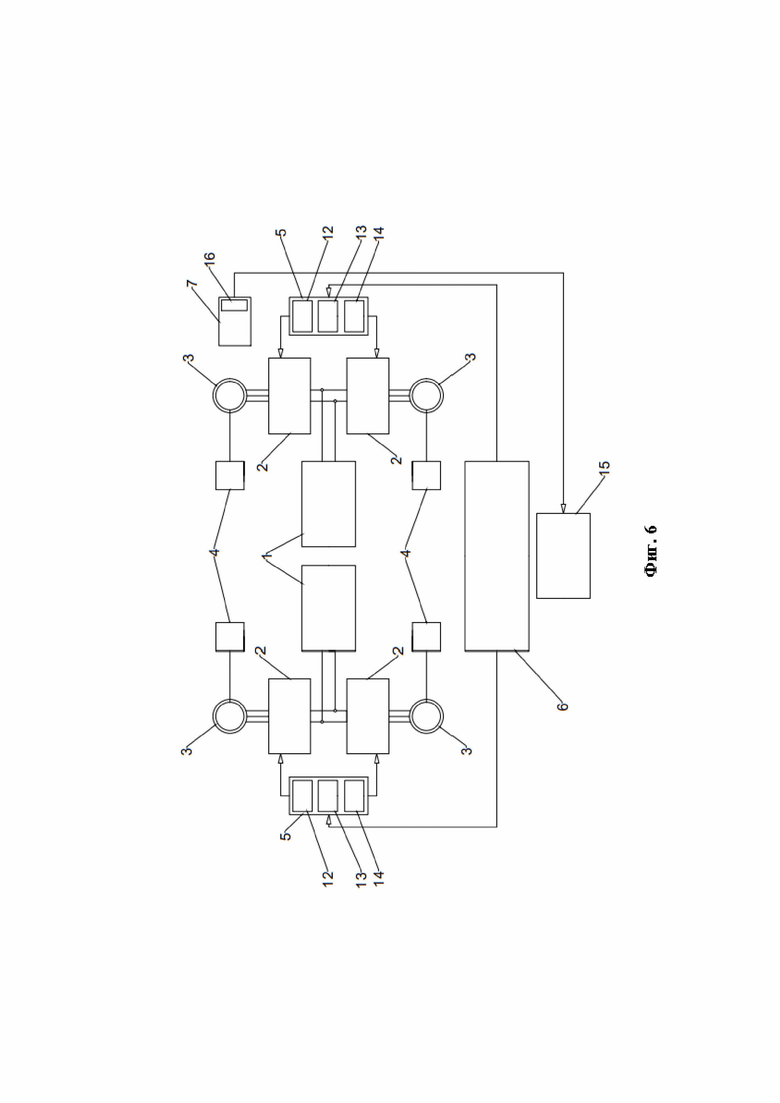
фиг. 6 – блок схема устройства, где:
1 – аккумуляторная батарея;
2 – регулятор оборотов;
3 – электродвигатель;
4 – пропеллер;
5 – система управления;
6 – пульт управления;
7 – камера;
8 – гибкие соединители;
9 – стержень;
10 – несущий стержень;
11 – крепление
12 – микроконтроллер
13 – датчик наклона
14 – приемник радиоуправления
15 – блок приема видеосигнала
16 – блок передачи видео сигнала
Беспилотный летательный аппарат включает опорную конструкцию, которая состоит из не менее шести попарно перпендикулярно установленных парных стерженей 9 и несущих стержней 10 (фиг. 1-5). На концах стерженей 9 и несущих стержней 10 установлены крепления 11, в которых закреплены концы гибких соединителей 8, таким образом, что конец каждого стержня 9 и несущих стержней 10 связан с не менее чем тремя концами перпендикулярных ему стержней 9 и несущих стержней 10. Гибкие соединители 8 выполнены одинаковой длины. Несущие стержни 10, установлены в горизонтальной плоскости, на них закреплены с возможностью съема не менее двух электродвигателей 3 с пропеллерами 4, а под ними – регуляторы оборотов 2. Между электродвигателями 3 установлена с возможностью съема камера 7, которая соединена с блоком передачи видео сигнала 16, а под ней аккумуляторная батарея 1 и система управления 5. Система управления 5 (фиг. 6) состоит из последовательно установленных микроконтроллера 12, датчика наклона 13 и приемника радиоуправления 14.
Аккумуляторная батарея 1 (фиг. 1-6) соединена электрическим кабелем с регуляторами оборотов 2 и камерой 7. Выход пульта управления 6 соединен со входом приемника радиоуправления 14 (фиг. 6). Выход приемника радиоуправления 14 соединен электрическим кабелем с входом микроконтроллера 12 (фиг. 6). Выход датчика наклона 13 (фиг. 6) соединен электрическим кабелем с входом микроконтроллера 12 (фиг. 6). Выход микроконтроллера 12 (фиг. 6) соединен электрическим кабелем со входами регуляторов оборотов 2 (фиг. 1,2,3,6). Выход блок передачи видео сигнала 16 (фиг. 6) соединен со входом блока приема видеосигнала 15 (фиг. 1,2,3,6).
Беспилотный летательный аппарат работает следующим образом. Беспилотный летательный аппарат для начала работы собирается из стрежней таким образом, чтобы несущие стержни 10 располагались в горизонтальной плоскости, далее на их концы устанавливаются гибкие соединители 8 с помощью креплений 11, далее гибкие соединители 8 устанавливают в крепления 11 стрежней 9 вертикальной и поперечной плоскостей. После сборки на несущих стержнях 10 устанавливаются аккумуляторные батареи 1 и соединяются электрическим кабелем с регуляторами оборотов 2 и камерой 7. Команды от оператора через пульт управления 6(фиг. 2). передаются в систему управления 5 (фиг. 1). Система управления 5 (фиг. 1) принимает сигнал с пульта управления 6(фиг. 2) с помощью приемника радиоуправления 14 и обрабатывает сигнал с помощью микроконтроллера 12. Микроконтроллер 12 на основе данных приемника радиоуправления 14 и датчика наклона 13, установленных в системе управления, создает сигналы управляющие регуляторами оборотов 2 (фиг. 1). Регуляторы оборотов 2 на основе управляющих сигналов подают ток из аккумуляторной батареи 1 в электродвигатели 3. Электродвигатели 3 вращают двухлопастные пропеллеры 4 попарно навстречу друг другу для компенсации реактивного момента и большей стабильности в полете. Управление тангажом и рысканием осуществляется посредством попарной регулировки оборотов двигателей таким образом, что, для изменения угла тангажа в положительную или отрицательную сторону, передняя пара двигателей увеличивает или уменьшает обороты соответственно. Для поворота по часовой стрелке, увеличиваются обороты двигателей, вращающихся также по часовой стрелке, а для поворота против часовой стрелки увеличиваются обороты двигателей, вращающихся против часовой стрелки. Для управления креном, применяется регулировка оборотов лишь одного из двигателей таким образом, что, для крена по часовой стрелке, увеличиваются обороты одного из левых по направлению к носу двигателей, а для крена против часовой стрелки, увеличиваются обороты одного из правых двигателей. Контроль движения осуществляется с помощью визуального контроля полета посредством камеры 7, передающей сигналы через медные проводники в блок передачи видео сигнала 16, из которого передаётся на блок приема видеосигнала 15, который находится у оператора. Применение данного беспилотного летательного аппарата обеспечивает возможность аэрофотографирования и видеонаблюдения с возможностью передачи информации получаемой бортовыми датчиками и камерой на пульт управления в режиме реального времени.
Устройство перемещается в воздухе практически во всех направлениях, за счет реактивной силы винтов, вращающихся в горизонтальной плоскости благодаря этому, можно проводить различные работы в труднодоступных местах. В случае воздействия на любой из шести стержней усилие с помощью гибких соединителей передается на остальные стержни и равномерно распределяется на все точки конструкции, что увеличивает прочность, надежность устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотная летательная платформа вертолётного типа с пневмомеханическим устройством для тушения пожаров | 2023 |
|
RU2814718C1 |
| Устройство электропитания беспилотного летательного аппарата мультироторного типа | 2022 |
|
RU2792109C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ | 2007 |
|
RU2339543C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО | 2012 |
|
RU2518440C2 |
| МОДУЛЬНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2816463C1 |
| ПЕРЕНОСНОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ МНОГОЦЕЛЕВОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2632779C1 |
| Автономный беспилотный летательный аппарат для доставки малокалиберных боеприпасов до цели | 2023 |
|
RU2826931C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
Беспилотный летательный аппарат содержит опорную конструкцию из не менее шести стержней, расположенных попарно из параллельно расположенных стержней в каждой паре, при этом одна пара из которых составляет несущие стержни (10), расположенные в горизонтальной плоскости, а две другие пары (11) расположены перпендикулярно друг другу, одна из них в горизонтальной плоскости, а другая в вертикальной. На концах всех стержней установлены крепления (11) для установки гибких соединителей (8), выполненных одинаковой длины и предназначенных для соединения всех концов стержней (9, 10) в единую конструкцию таким образом, чтобы каждый конец стержня имел не менее трех гибких соединений (8) с концами других стержней (9, 10), расположенных рядом в пределах длины гибкого соединителя. На несущих стержнях (10) закреплены с возможностью съема не менее двух электродвигателей (3) с пропеллерами (4), а под ними - регуляторы оборотов (2). Между электродвигателями (3) установлена с возможностью съема камера (7), которая соединена с блоком передачи видеосигнала (16), а под ней - аккумуляторная батарея (1) и система управления (5). Система управления состоит из последовательно установленных микроконтроллера (12), датчика наклона (13) и приемника радиоуправления (14). Обеспечивается повышение надежности устройства. 6 ил.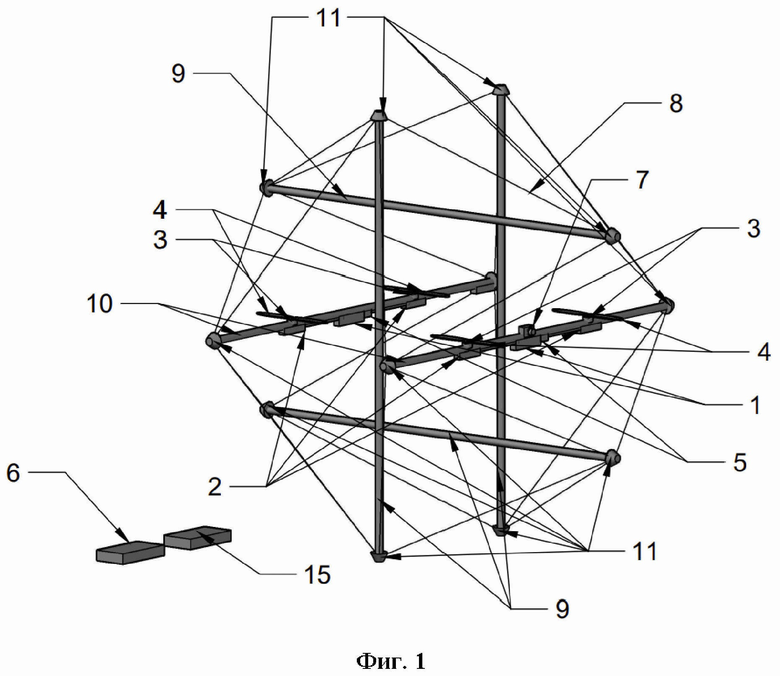
Беспилотный летательный аппарат, содержащий опорную конструкцию из не менее шести стержней, расположенных попарно из двух параллельно расположенных стержней в каждой паре, одна пара из которых составляет несущие стержни (10), расположенные в горизонтальной плоскости, а две другие пары (11) расположены перпендикулярно друг другу, одна из них в горизонтальной плоскости, а другая в вертикальной, при этом на концах всех стержней установлены крепления (11) для установки гибких соединителей (8), выполненных одинаковой длины и предназначенных для соединения всех концов стержней (9, 10) в единую конструкцию таким образом, чтобы каждый конец стержня имел не менее трех гибких соединений (8) с концами других стержней (9, 10), расположенных рядом в пределах длины гибкого соединителя, при этом на несущих стержнях (10) закреплены с возможностью съема не менее двух электродвигателей (3) с пропеллерами (4), а под ними - регуляторы оборотов (2), при этом между электродвигателями (3) установлена с возможностью съема камера (7), которая соединена с блоком передачи видеосигнала (16), а под ней - аккумуляторная батарея (1) и система управления (5), состоящая из последовательно установленных микроконтроллера (12), датчика наклона (13) и приемника радиоуправления (14).
| Тяговая машина для испытания материалов на разрыв | 1934 |
|
SU41726A1 |
| НАКЛОННЫЙ ЖОЛОБ ДЛЯ СПУСКА ШЛАКА | 1932 |
|
SU42897A1 |
| Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки и способ управления им | 2018 |
|
RU2706765C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО | 2012 |
|
RU2518440C2 |
| CN 204979259 U, 20.01.2016 | |||
| CN 205554567 U, 07.09.2016. | |||
