Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к области технологий беспроводной связи, но не ограничивается ею, и, в частности, относится к способу и устройству для определения местоположения, а также к устройству связи.
Предпосылки создания изобретения
[0002] Спутниковая связь имеет широкий спектр сценариев применения благодаря характеристикам широкой зоны обслуживания и высокой надежности. Например, спутниковая связь может применяться в удаленных районах, при оказании помощи при стихийных бедствиях и в других ситуациях. Технология спутниковой связи считается важной частью будущей сотовой мобильной связи. При использовании спутника для сотовой мобильной связи сети необходимо знать фактическое достоверное местоположение пользовательского оборудования (User Equipment, UE), например, местоположение UE в процессе ликвидации последствий стихийных бедствиях и аварийно-спасательных работ, или же сеть может получать местоположение UE, чтобы определять, находится ли UE в пределах национальной границы для авторизации.
Сущность изобретения
[0003] В свете вышеизложенного, варианты осуществления изобретения предлагают способ и устройство для определения местоположения, а также устройство связи.
[0004] Согласно первому аспекту изобретения предлагается способ определения местоположения. Способ включает в себя:
[0005] определение информации о местоположении UE на основе расстояний между UE и обслуживающим UE спутником(-ами) неназемных сетей (Non-Terrestrial Networks, NTN) по меньшей мере в три разных момента и информации о местоположении обслуживающего UE спутника(-ов) NTN по меньшей мере в три разных момента; причем орбитальные местоположения обслуживающего UE спутника(-ов) NTN по меньшей мере в три разных момента различны, и орбитальные местоположения обслуживающего UE спутника(-ов) NTN принадлежат по меньшей мере двум разным спутниковым орбитам.
[0006] Согласно второму аспекту изобретения предлагается устройство для определения местоположения. Устройство содержит:
[0007] первый модуль определения, сконфигурированный для определения информации о местоположении UE на основе расстояний между UE и обслуживающим UE спутником(-ами) NTN по меньшей мере в три разных момента и информации о местоположении обслуживающего UE спутника(-ов) NTN по меньшей мере в три разных момента; причем орбитальные местоположения обслуживающего UE спутника(-ов) NTN различны по меньшей мере в три разных момента, и орбитальные местоположения обслуживающего UE спутника(-ов) NTN принадлежат по меньшей мере двум разным спутниковым орбитам.
[0008] Согласно третьему аспекту изобретения предлагается устройство связи. Устройство связи содержит процессор, память и исполняемую программу, хранящуюся в памяти и способную выполняться процессором. Когда процессор выполняет исполняемую программу, выполняются шаги способа определения местоположения согласно первому аспекту.
[0009] С помощью способа, устройства и устройства связи согласно вариантам осуществления изобретения, UE или обслуживающий спутник(-и) NTN определяет информацию о местоположении UE на основе расстояний между UE и обслуживающим UE спутником(-ами) NTN по меньшей мере в три разных момента времени и информации о местоположении обслуживающего UE спутника(-ов) NTN по меньшей мере в три разных момента времени. Орбитальные местоположения обслуживающего UE спутника(-ов) NTN по меньшей мере в три разных момента различны, и орбитальные местоположения обслуживающего UE спутника(-ов) NTN принадлежат по меньшей мере двум разным спутниковым орбитам. Таким образом, местоположение UE определяется обслуживающим спутником(-ами) NTN в три разных момента времени. Проблема, состоящая в том, что местоположение UE не может быть определено, если UE не имеет возможности позиционирования, такой как с использованием глобальной системы позиционирования (Global Positioning System, GPS), может быть решена, и может быть достигнуто позиционирование UE. Кроме того, путем позиционирования UE с помощью обслуживающего спутника(-ов) NTN, промежуточные этапы передачи информации о местоположении UE могут быть опущены, что повышает надежность информации о местоположении UE, принимаемой обслуживающим спутником NTN.
[0010] Понятно, что как предшествующее общее описание, так и последующее подробное описание являются только иллюстративными и не предназначены для ограничения вариантов осуществления изобретения.
Краткое описание чертежей
[0011] Прилагаемые чертежи, которые включены в настоящее описание и составляют его часть, иллюстрируют варианты осуществления, соответствующие изобретению, и вместе с описанием служат для пояснения его принципов.
[0012] Фиг. 1 представляет собой структурную схему, иллюстрирующую систему беспроводной связи согласно варианту осуществления изобретения.
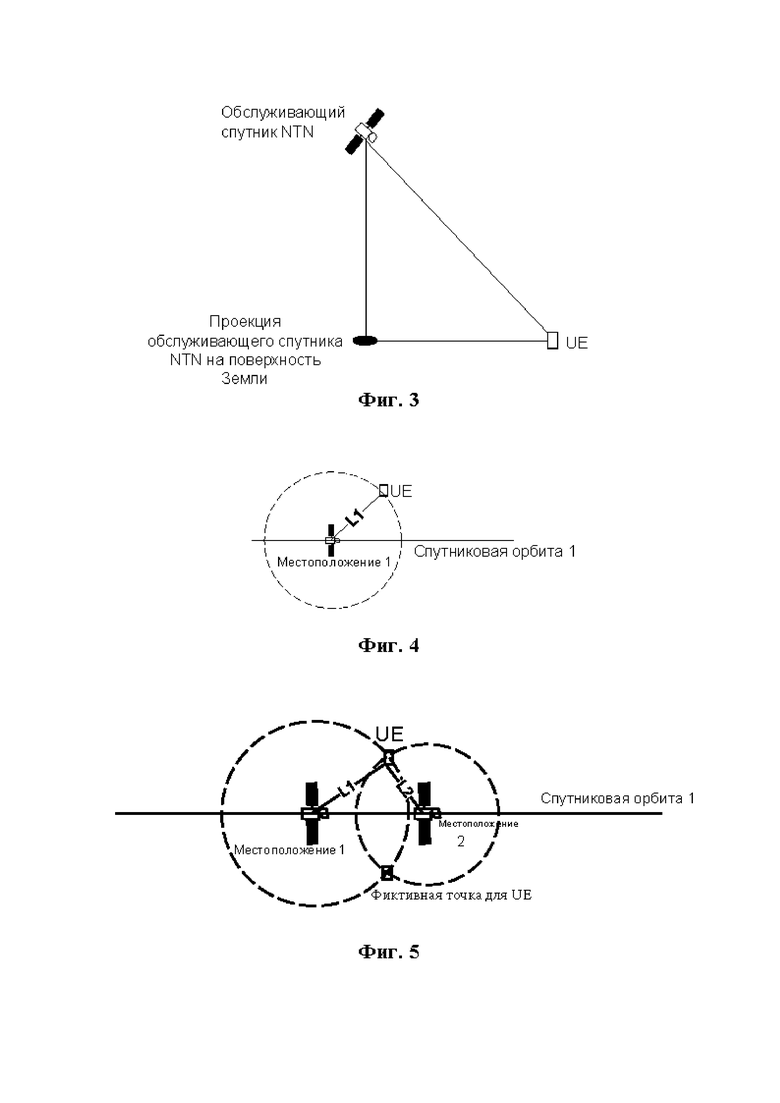
[0013] Фиг. 2 представляет собой блок-схему, иллюстрирующую способ определения местоположения согласно варианту осуществления изобретения.
[0014] Фиг. 3 представляет собой схему, иллюстрирующую местоположения обслуживающего спутника NTN и UE согласно варианту осуществления изобретения.
[0015] Фиг. 4 представляет собой схему, иллюстрирующую местоположения обслуживающего спутника NTN и UE согласно варианту осуществления изобретения.
[0016] Фиг. 5 представляет собой схему, иллюстрирующую местоположения обслуживающего спутника NTN и UE согласно варианту осуществления изобретения.
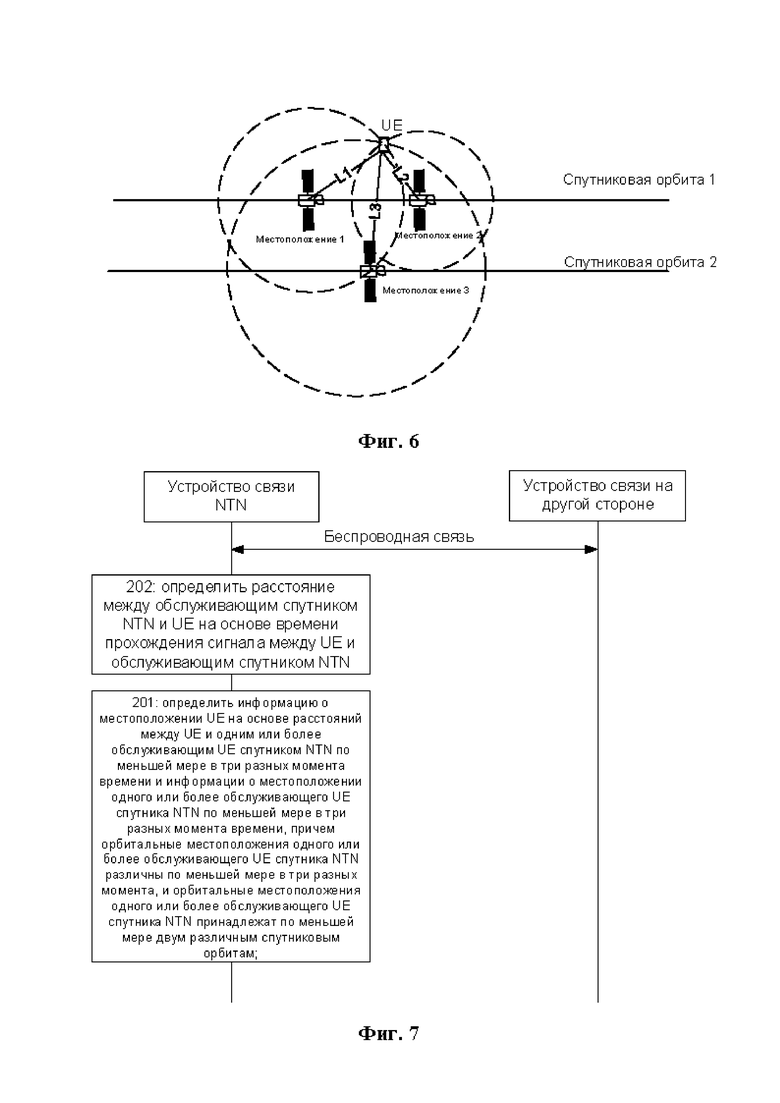
[0017] Фиг. 6 представляет собой схему, иллюстрирующую местоположения обслуживающего спутника NTN и UE согласно варианту осуществления изобретения.
[0018] Фиг. 7 представляет собой блок-схему, иллюстрирующую другой способ определения местоположения согласно варианту осуществления изобретения.
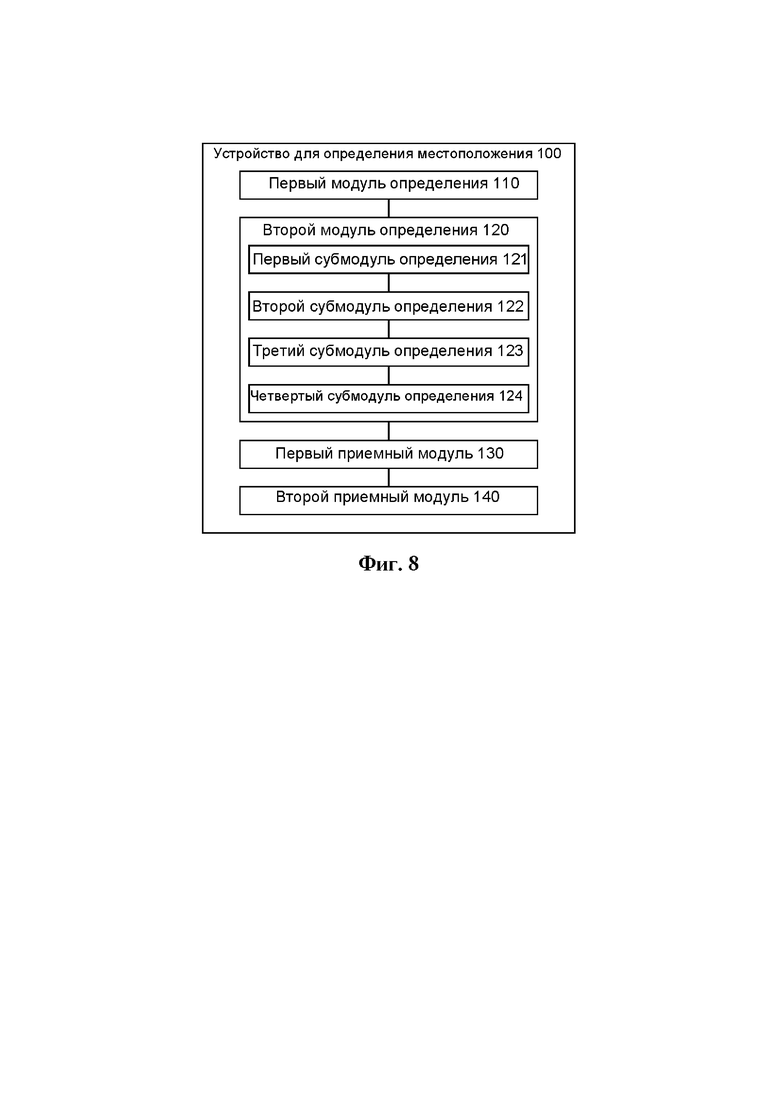
[0019] Фиг. 8 представляет собой схему, иллюстрирующую устройство для определения местоположения согласно варианту осуществления изобретения.
[0020] Фиг. 9 представляет собой блок-схему, иллюстрирующую устройство связи согласно варианту осуществления изобретения.
Подробное описание
[0021] Далее будут сделаны подробные ссылки на некоторые варианты осуществления изобретения, примеры которых проиллюстрированы на прилагаемых чертежах. Последующее описание относится к прилагаемым чертежам, на которых одни и те же позиции на разных чертежах обозначают одни и те же или подобные элементы, если не указано иное. Реализации, указанные в последующем описании некоторых вариантов осуществления, не представляют все реализации, согласующиеся с изобретением. Вместо этого они являются просто примерами устройств и способов, согласующихся с аспектами, связанными с изобретением, как указано в прилагаемой формуле изобретения.
[0022] Термины, используемые в вариантах осуществления изобретения, предназначены только для целей описания конкретных вариантов осуществления и не предназначены для ограничения изобретения. Используемые в вариантах осуществления изобретения и прилагаемой формуле изобретения формы единственного числа предназначены также для включения форм множественного числа, если контекст явно не указывает на другие значения. Также следует понимать, что термин "и/или", используемый в данном документе, относится и включает любые и все возможные комбинации одного или нескольких связанных перечисленных элементов.
[0023] Следует понимать, что хотя термины "первый", "второй", "третий" и т.д. могут использоваться в вариантах осуществления изобретения для описания различных видов информации, такая информация не должна ограничиваться этими терминами. Эти термины используются только для того, чтобы отличить один тип информации от другого. Например, не выходя за рамки изобретения, первая информация также может упоминаться как вторая информация, и аналогичным образом вторая информация может также упоминаться как первая информация. В зависимости от контекста слово "если", используемое здесь, может быть истолковано как "во время", "когда" или "в ответ на определение".
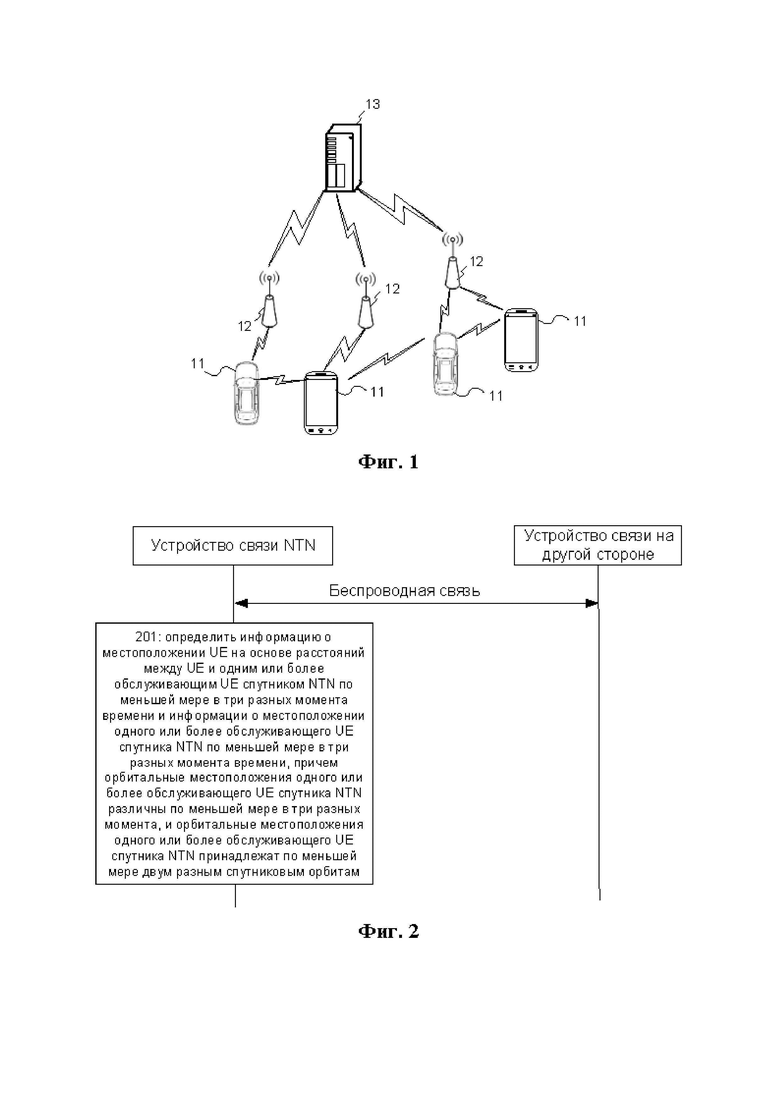
[0024] Фиг. 1 представляет собой структурную схему, иллюстрирующую систему беспроводной связи согласно варианту осуществления изобретения. Как показано на фиг. 1, система беспроводной связи представляет собой систему связи, основанную на технологии сотовой мобильной связи. Система беспроводной связи может содержать множество терминалов 11 и множество базовых станций 12.
[0025] Терминал 11 может быть устройством, которое обеспечивает связь для передачи голоса и/или данных пользователю. Терминал 11 может осуществлять связь с одной или несколькими базовыми сетями через сеть радиодоступа (Radio Access Network, RAN). Терминал 11 может быть терминалом Интернета вещей (Internet of Things, IoT), таким как сенсорное устройство, мобильный телефон (или "сотовый" телефон) и компьютер с терминалом IoT. Терминал 11 также может быть стационарным, переносным, карманным, ручным, встроенным в компьютер или установленным на транспортном средстве устройством, например, станцией (Station, STA), абонентский блоком, абонентской станцией, мобильной станцией, мобильным пультом, удаленной станцией, точкой доступа, удаленным терминалом, терминалом доступа, пользовательским терминалом, пользовательским агентом, пользовательским устройством или UE. Или терминал 11 может быть беспилотным летательным аппаратом. Или терминал 11 может быть устройством, установленным на транспортном средстве, например, блоком управления двигателем (Engine Control Unit, ECU) с функцией беспроводной связи или устройством беспроводной связи, внешне подключенным к ECU. Или терминал 11 также может быть придорожным устройством, например, уличным фонарем, сигнальным фонарем или другими придорожными устройствами с функцией беспроводной связи.
[0026] Базовая станция 12 может быть сетевым устройством в системе беспроводной связи. Система беспроводной связи может быть системой мобильной связи четвертого поколения (4th Generation, 4G), также известной как система долгосрочной эволюции (Long Term Evolution, LTE). Или система беспроводной связи также может быть системой 5-го поколения (5th Generation, 5G), также известной как система Новое радио (New Radio, NR) или система 5G NR. Или система беспроводной связи может быть системой следующего поколения системы 5G. Сеть доступа в системе 5G может называться сетью радиодоступа нового поколения (New Generation-Radio Access Network, NG-RAN) или системой управления смешанным трафиком (Mixed Traffic Control, МТС).
[0027] Базовая станция 12 может быть усовершенствованным узлом В (Evolved Node В, eNodeB), используемым в системе 4G. Или базовая станция 12 также может быть узлом В следующего поколения (gNode В, gNB) с централизованно-распределенной архитектурой, используемой в системе 5G. Когда базовая станция 12 применяет централизованную распределенную архитектуру, она обычно содержит центральный блок (Central Unit, CU) и по меньшей мере два распределенных блока (Distributed Unit, DU). Центральный блок снабжен стеками протоколов уровня протокола конвергенции пакетных данных (Packet Data Convergence Protocol, PDCD), уровня управления линией радиосвязи (Radio Link Control, RLC) и уровня управления доступом к среде передачи (Media Access Control, MAC). DU снабжен стеком протоколов физического (PHYsical, PHY) уровня, и конкретная реализация базовой станции 12 не ограничивается в этом описании.
[0028] Беспроводное соединение может быть установлено между базовой станцией 12 и терминалом 11 через беспроводной радио интерфейс NR. В различных реализациях беспроводной радиоинтерфейс NR представляет собой беспроводной радио интерфейс NR, основанный на стандарте 4G. Или беспроводной радио интерфейс NR может быть беспроводным радиоинтерфейсом NR, основанным на стандарте 5G, таким как новое NR. Или беспроводной NR также может быть беспроводным NR на основе стандарта сети 5G следующего поколения.
[0029] В некоторых вариантах осуществления изобретения между терминалами 11 также могут быть установлены сквозные (End to End, Е2Е) соединения в таких сценариях, как связь между транспортными средствами (Vehicle to Vehicle, V2V), связь транспортного средство с инфраструктурой (Vehicle to Infrastructure, V2I), связь транспортного средства с пешеходом (Vehicle to Pedestrian, V2P) и связь транспортного средства со всем (Vehicle to Everything, V2X).
[0030] В некоторых вариантах осуществления изобретения вышеуказанная система беспроводной связи может содержать также устройство 13 управления сетью.
[0031] Множество базовых станций 12 соответственно соединяются с устройством 13 управления сетью. Устройство 13 управления сетью может быть устройством базовой сети в системе беспроводной связи, например, быть объектом управления мобильностью (Mobility Management Entity, ММЕ) в усовершенствованном ядре пакетной сети (Evolved Packet Core, ЕРС). Или устройство управления сетью может быть другим устройством базовой сети, таким как обслуживающий шлюз (Serving GateWay, SGW), шлюз сети передачи данных общего пользования (Public Data Network GateWay, PGW), функциональный объект определения правил политики и начисления стоимости (Policy And Charging Rules Function, PCRF) или опорный абонентский сервер (Home Subscriber Server, HSS) и т.п.Форма реализации устройства 13 управления сетью в вариантах осуществления изобретения не ограничивается.
[0032] Основные действующие объекты, участвующие в этих вариантах осуществления изобретения, включают в себя, но не ограничиваются ими, UE, такое как терминалы мобильных телефонов, поддерживающие сотовую мобильную связь, NTN и спутники.
[0033] Один сценарий применения вариантов осуществления изобретения заключается в том, что, как правило, NTN может получать информацию о местоположении UE следующими двумя способами.
[0034] В первом способе UE информирует сеть о собственном местоположении. Этот способ имеет следующие недостатки:
[0035] UE может не иметь возможности получать собственное местоположение.
[0036] Местоположение UE может быть неверным. UE может сообщать о неправильном местоположении, когда необходимо определить, находится ли UE в авторизованной зоне.
[0037] Информация о местоположении UE может быть перехвачена и изменена.
[0038] Во втором способе UE позиционируется посредством базовой станции, что имеет следующие недостатки:
[0039] UE, которое использует для связи спутники неназемных сетей (NTN), обычно может в один отдельно взятый момент времени подключаться только к одному спутнику и не может использовать технологию позиционирования с несколькими базовыми станциями, применяемую в наземной мобильной связи.
[0040] Один спутник NTN имеет очень широкую зону покрытия, и трудно подтвердить точное местоположение UE на основе используемого спутника.
[0041] Как показано на фиг. 2, варианты осуществления изобретения предлагают способ определения местоположения, и этот способ включает в себя следующее:
[0042] На шаге 201 определяют информацию о местоположении UE на основе расстояний между UE и обслуживающим UE спутником(-ами) NTN по меньшей мере в три разных момента и информации о местоположении обслуживающего UE спутника(-ов) NTN по меньшей мере в три разных момента. Орбитальные местоположения обслуживающего UE спутника(-ов) NTN различны по меньшей мере в три разных момента, и орбитальные местоположения обслуживающего UE спутника(-ов) NTN принадлежат по меньшей мере двум разным спутниковым орбитам.
[0043] Способ определения местоположения согласно вариантам осуществления изобретения может выполняться пользовательским оборудованием (UE) для сотовой мобильной связи NTN или спутником в системе сотовой мобильной связи NTN.
[0044] UE может установить соединение связи с обслуживающей базовой станцией через соединение по фидерной линии между высотной платформой, такой как спутник, и наземной станцией спутниковой связи, такой как шлюз (GateWay, GW). Обслуживающий спутник NTN может быть спутником в соединении фидерной линии между UE и обслуживающей базовой станцией. UE может в один отдельно взятый момент времени устанавливать соединение с обслуживающей базовой станцией через один обслуживающий спутник NTN. Обслуживающие UE спутники NTN в разные моменты могут быть одними и теми же или разными.
[0045] UE или обслуживающий спутник NTN могут измерять расстояния между UE и обслуживающим спутником(-ами) NTN по меньшей мере в три разных момента. UE или обслуживающий спутник NTN могут определять расстояние между UE и обслуживающим спутником NTN на основе, например, времени прохождения сигнала между UE и обслуживающим спутником NTN.
[0046] Орбитальные местоположения обслуживающего спутника(-ов) NTN в три разных момента могут быть определены на основе эфемерид. Информация о местоположении обслуживающего спутника NTN, такая как местоположение проекции орбитальной позиции обслуживающего спутника NTN на Землю и высота обслуживающего спутника NTN, может быть определена на основе орбитального местоположения обслуживающего спутника NTN. Расстояние между UE и местоположением проекции обслуживающего спутника NTN на Землю можно определить на основе расстояния между UE и обслуживающим спутником NTN и высоты обслуживающего спутника NTN. Местоположение UE может быть определено способом триангуляции на основе местоположения проекции обслуживающего спутника NTN на Землю в каждом из по меньшей мере трех разных моментов и расстояния между UE и местоположением проекции обслуживающего спутника NTN на Землю в каждом из вышеперечисленных по меньшей мере трех разных моментов. Обслуживающий спутник(-и) NTN в три разных момента может быть одним и тем же спутником или разными спутниками. Расположения проекций обслуживающего спутника(-ов) NTN на Землю в три разных момента образуют треугольник.
[0047] В одном варианте осуществления изобретения упомянутые выше "обслуживающие UE спутники NTN по меньшей мере в три разных момента" включают в себя по меньшей мере два спутника с разными спутниковыми орбитами.
[0048] Например, позиционирование UE выполняется с использованием одного обслуживающего спутника NTN в двух разных орбитальных местоположениях на одной и той же орбите и другого обслуживающего спутника NTN на другой орбите.
[0049] Позиционирование UE также может быть выполнено с использованием по меньшей мере трех обслуживающих спутников NTN по меньшей мере на трех орбитах, и при измерении расстояний по меньшей мере три обслуживающих спутника NTN не находятся на одной линии.
[0050] Например, спутник для мобильной связи обычно находится на орбите, которая находится на высоте более 600 км над Землей, и расстояние по высоте между обслуживающим спутником NTN и Землей можно определить на основе эфемерид. Как показано на фиг. 3, если известно расстояние между обслуживающим спутником NTN и UE и известно расстояние по высоте между обслуживающим спутником NTN и Землей, наземное расстояние между местоположением проекции обслуживающего спутника NTN и UE может быть получено в соответствии с теоремой Пифагора.
[0051] Фиг. 4-6 представляют собой виды сверху, иллюстрирующие относительные расположения между обслуживающим спутником(-ами) NTN и UE. Как показано на фиг. 4, расстояние между местоположением проекции обслуживающего спутника NTN на Землю и UE может быть определено как L1, когда обслуживающий спутник NTN находится в местоположении 1. Кроме того, может быть известно, что UE может быть расположено в любой точке окружности А, центром которой является проекция обслуживающего спутника NTN на Землю, то есть местоположение 1, а радиусом является расстояние L1.
[0052] Как показано на фиг. 5, когда обслуживающий спутник NTN находится в местоположении 2, расстояние между местоположением проекции обслуживающего спутника NTN на Землю и UE может быть определено как L2. Кроме того, может быть известно, что UE расположено в любой точке окружности В, центр которой является местоположением проекции обслуживающего спутника NTN на Землю, то есть местоположением 2, а радиусом является расстояние L2. Окружность А и окружность В пересекаются в 2 точках, одна точка является истинным местоположением UE, а другая точка является "фиктивной точкой".
[0053] Как показано на фиг. 6, когда обслуживающий спутник NTN находится в местоположении 3, расстояние между местоположением проекции обслуживающего спутника NTN на Землю и UE может быть определено как L3. Кроме того, может быть известно, что UE расположено в любой точке окружности С, центром которой является местоположение проекции обслуживающего спутника NTN на Землю, то есть местоположение 3, а радиусом является расстояние L3. Окружность А, окружность В и окружность С пересекаются в одной точке, то есть в истинном местоположении UE.
[0054] Здесь местоположение 1, местоположение 2 и местоположение 3 могут не принадлежать одной и той же спутниковой орбите. Вышеупомянутый "обслуживающий спутник(-и) NTN в трех местоположениях" может быть одним и тем же спутником или может не быть одним и тем же спутником.
[0055] Таким образом, местоположение UE определяется обслуживающим спутником(-ами) NTN в три момента. Проблема, состоящая в том, что местоположение UE не может быть определено, если UE не имеет возможности позиционирования, такой как с использованием GPS, решается, и реализуется позиционирование UE. Кроме того, путем позиционирования UE посредством обслуживающего спутника NTN можно исключить промежуточные этапы передачи информации о местоположении UE, что повышает надежность информации о местоположении UE, получаемой обслуживающим спутником NTN.
[0056] В одном варианте осуществления изобретения, как показано на фиг. 7, способ дополнительно включает следующее:
[0057] На шаге 202 расстояние между обслуживающим спутником NTN и UE определяется на основе времени прохождения сигнала между UE и обслуживающим спутником NTN.
[0058] Расстояние между UE и обслуживающим спутником NTN можно определить на основе времени прохождения сигнала между UE и обслуживающим спутником NTN.
[0059] Скорость распространения сигнала между UE и обслуживающим спутником NTN близка к скорости света, и произведение скорости света на время прохождения сигнала между UE и обслуживающим спутником NTN можно определить как расстояние между обслуживающим спутником и UE.
[0060] В одном варианте осуществления изобретения определение расстояния между обслуживающим спутником NTN и UE на основе времени прохождения сигнала между UE и обслуживающим спутником NTN включает: определение времени прохождения первого сигнала в прямом и обратном направлении между обслуживающим спутником NTN и UE путем вычитания длительности первого времени реакции UE из длительности первого интервала между первым моментом, когда обслуживающий спутник NTN передает первый сигнал позиционирования в UE, и вторым моментом, когда обслуживающий спутник NTN принимает второй сигнал позиционирования, передаваемый из UE, причем второй сигнал позиционирования передается из UE в ответ на прием первого сигнала позиционирования, а длительность первого времени реакции включает временной интервал между временем, когда первый сигнал позиционирования принимается UE, и временем, когда передается второй сигнал позиционирования; и определение расстояния между обслуживающим спутником NTN и UE на основании времени прохождения сигнала для прохождения первого сигнала в прямом и обратном направлении.
[0061] Первый сигнал позиционирования и второй сигнал позиционирования могут быть сигналами, специально определенными для выполнения измерений расстояния, или существующими сигналами, передаваемыми между UE и обслуживающим спутником NTN.
[0062] Измерение расстояния может быть инициировано обслуживающим спутником NTN. Например, обслуживающий спутник NTN может передать первый сигнал позиционирования в UE и зарегистрировать время передачи первого сигнала позиционирования.
[0063] После приема первого сигнала позиционирования, UE может передать обратно второй сигнал позиционирования на обслуживающий спутник NTN. Поскольку UE необходимо проанализировать и декодировать первый сигнал позиционирования, существует длительность первого времени реакции между временем, когда первый сигнал позиционирования принимается UE, и временем, когда передается второй сигнал позиционирования.
[0064] После приема второго сигнала позиционирования обслуживающий спутник NTN может зарегистрировать время приема второго сигнала позиционирования. Обслуживающий спутник NTN может определить длительность прохождения сигнала в прямом и обратном направлении между обслуживающим спутником NTN и UE на основе времени передачи первого сигнала позиционирования, времени приема второго сигнала позиционирования и длительности первого времени реакции и затем определить расстояние между обслуживающим спутником NTN и UE.
[0065] В одном варианте осуществления изобретения, в ответ на определение обслуживающим спутником NTN расстояния между обслуживающим спутником NTN и UE на основе времени прохождения сигнала для прохождения первого сигнала в прямом и обратном направлении, способ дополнительно включает в себя прием обслуживающим спутником NTN информации указания, передаваемой UE для указания длительности первого времени реакции.
[0066] UE может регистрировать время приема первого сигнала позиционирования и время передачи второго сигнала позиционирования, а затем определять длительность первого времени реакции. UE передает информацию указания для указания длительности первого времени реакции на обслуживающий спутник NTN, и обслуживающий спутник NTN может определить время прохождения первого сигнала в прямом и обратном направлении на основе длительности первого времени реакции, указанной принимаемой информацией указания.
[0067] В одном варианте осуществления изобретения определение расстояния между обслуживающим спутником NTN и UE на основе времени прохождения сигнала между обслуживающим спутником NTN и UE включает в себя: определение времени прохождения второго сигнала в прямом и обратном направлении между обслуживающим спутником NTN и UE путем вычитания длительности второго времени реакции обслуживающего спутника NTN из длительности второго интервала между третьим моментом, когда UE передает третий сигнал позиционирования на обслуживающий спутник NTN, и четвертым моментом, когда UE принимает четвертый сигнал позиционирования, передаваемый обслуживающим спутником NTN, причем четвертый сигнал позиционирования передается обслуживающим спутником NTN в ответ на прием третьего сигнала позиционирования, а длительность второго времени реакции включает в себя временной интервал между временем, когда третий сигнал позиционирования принимается обслуживающим спутником NTN, и временем, когда передается четвертый сигнал позиционирования; и определение расстояния между обслуживающим спутником NTN и UE на основе времени прохождения второго сигнала в прямом и обратном направлении.
[0068] Третий сигнал позиционирования и четвертый сигнал позиционирования могут быть сигналами, специально определенными для выполнения измерений расстояния, или существующими сигналами, передаваемыми между UE и обслуживающим спутником NTN.
[0069] Измерение расстояния может быть инициировано UE. Например, UE может передать третий сигнал позиционирования на обслуживающий спутник NTN и зарегистрировать время передачи третьего сигнала позиционирования.
[0070] После приема третьего сигнала позиционирования обслуживающий спутник NTN может передать обратно четвертый сигнал позиционирования в UE. Поскольку обслуживающему спутнику NTN необходимо проанализировать и декодировать третий сигнал позиционирования, существует длительность второго времени реакции между временем, когда третий сигнал позиционирования принимается обслуживающим спутником NTN, и временем, когда передается четвертый сигнал позиционирования.
[0071] После приема четвертого сигнала позиционирования UE может зарегистрировать время приема четвертого сигнала позиционирования. UE может определить длительность прохождения сигнала в прямом и обратном направлении между обслуживающим спутником NTN и UE на основе времени передачи третьего сигнала позиционирования, времени приема четвертого сигнала позиционирования и длительности второго времени реакции, а затем определить расстояние между обслуживающим спутником NTN и UE.
[0072] В одном варианте осуществления изобретения, в ответ на определение посредством UE расстояния между обслуживающим спутником NTN и UE на основе времени прохождения второго сигнала в прямом и обратном направлении, способ дополнительно включает прием информации указания, передаваемой обслуживающим спутником NTN для указания третьего момента и четвертого момента.
[0073] Обслуживающий спутник NTN может регистрировать время приема третьего сигнала позиционирования и время передачи четвертого сигнала позиционирования, а также определять длительность второго времени реакции. Обслуживающий спутник NTN передает информацию указания для указания длительности второго времени реакции на UE, и UE может определить время прохождения второго сигнала в прямом и обратном направлении на основе длительности второго времени реакции, указанной принятой информацией указания.
[0074] Конкретный пример представлен ниже в сочетании с любым из приведенных выше вариантов осуществления изобретения.
[0075] Спутник мобильной связи обычно представляет собой низкоорбитальный спутник, который очень быстро перемещается относительно поверхности Земли. По сравнению со скоростью спутника, UE относительно поверхности Земли можно считать относительно неподвижным.
[0076] Спутник, используемый для мобильной связи, обычно находится на орбите, которая находится на высоте более 600 км над поверхностью Земли, а неровности поверхности Земли в зоне покрытия спутниковой связи будут превышать 1 км только в экстремальных условиях, поэтому поверхность Земли можно считать плоской, а расстояние между спутником и поверхностью Земли известным. Поэтому, как показано на фиг. 3, если спутник может измерить расстояние между ним и UE, то расстояние между проекцией спутника и UE можно получить по теореме Пифагора.
[0077] В вариантах осуществления изобретения спутник измеряет расстояния до UE в разные моменты времени, что эквивалентно измерению расстояний между спутником и UE в разных местоположениях, и в итоге может быть получено истинное местоположение UE.
[0078] Конкретная схема выглядит следующим образом:
[0079] 1. Спутник связи или UE передает сигнал позиционирования другой стороне и регистрирует время, когда сигнал передан. Например, время передачи сигнала обозначается как t1.
[0080] 2. После приема сигнала позиционирования, UE или спутник почти немедленно передает сигнал позиционирования другой стороне и регистрирует разницу во времени между временем приема сигнала позиционирования и временем передачи сигнала позиционирования. Например, разница во времени обозначается как Δt.
[0081] 3. После приема сигнала, переданного другой стороной, спутник или UE регистрирует время приема сигнала. Например, время приема сигнала обозначается как t2.
[0082] 4. Можно получить время прохождения сигнала и рассчитать расстояние между спутником связи и UE.
[0083] 5. Как показано на фиг. 4, спутник 1 в местоположении 1 может определить расстояние между спутником 1 и UE и получить прямое расстояние L1 между проекцией спутника 1 на Землю и UE, а затем узнать, что UE может находиться на окружности, центром которой является проекция спутника на Землю, а радиусом - расстояние L1.
[0084] 6. Аналогично, как показано на фиг. 5, спутник 1 в местоположении 2 может определить расстояние L2 между проекцией спутника на Землю и UE, а затем узнать, что UE может быть расположено на окружности, центром которой является проекция спутника на Землю, а радиусом - расстояние L2. Возможные местоположения UE могут быть определены на основе измерений, сделанных спутником в этих двух местоположениях, одно возможное местоположение является истинным местоположением UE, а другое возможное местоположение является "фиктивной точкой".
[0085] 7. Как показано на фиг. 6, спутник 2 в местоположении 3 может определить расстояние L3 между проекцией спутника на Землю и UE, а затем узнать, что UE расположено на окружности, центром которой является проекция спутника на Землю, а радиусом - расстояние L3. Точка пересечения этих трех окружностей, полученная из трех измерений, является истинным местоположением UE.
[0086] Варианты осуществления изобретения предлагают также устройство для определения местоположения, применяемое к устройству связи NTN для беспроводной связи. Как показано на фиг. 8, устройство 100 содержит первый модуль 110 определения.
[0087] Первый модуль 110 определения сконфигурирован для определения информации о местоположении UE на основе расстояний между UE и обслуживающим UE спутником(-ами) NTN по меньшей мере в три разных момента и информации о местоположении обслуживающего UE спутника(-ов) NTN по меньшей мере в три разных момента; причем орбитальные местоположения обслуживающего UE спутника(-ов) NTN по меньшей мере в три разных момента различаются, и орбитальные местоположения обслуживающего UE спутника(-ов) NTN, принадлежат по меньшей мере двум разным спутниковым орбитам.
[0088] В варианте осуществления изобретения устройство 100 дополнительно содержит второй модуль 120 определения.
[0089] Второй модуль 120 определения сконфигурирован для определения расстояния между обслуживающим спутником NTN и UE на основе времени прохождения сигнала между UE и обслуживающим спутником NTN.
[0090] В варианте осуществления изобретения второй модуль 120 определения содержит первый субмодуль 121 определения и второй субмодуль 122 определения.
[0091] Первый субмодуль 121 определения сконфигурирован для определения времени прохождения первого сигнала в прямом и обратном направлении между обслуживающим спутником NTN и UE путем вычитания длительности первого времени реакции UE из длительности первого интервала между первым моментом, когда обслуживающий спутник NTN передает первый сигнал позиционирования в UE, и вторым моментом, когда обслуживающий спутник NTN принимает второй сигнал позиционирования, передаваемый UE, причем второй сигнал позиционирования передается UE в ответ на прием первого сигнала позиционирования, а длительность первого времени реакции включает в себя временной интервал между временем, когда UE принимает первый сигнал позиционирования, и временем, когда передается второй сигнал позиционирования.
[0092] Второй субмодуль 122 определения сконфигурирован для определения расстояния между обслуживающим спутником NTN и UE на основе времени прохождения первого сигнала в прямом и обратном направлении.
[0093] В одном варианте осуществления изобретения устройство 100 дополнительно содержит первый приемный модуль 130, сконфигурированный так, чтобы, в ответ на определение обслуживающим спутником NTN расстояния между обслуживающим спутником NTN и UE на основе времени прохождения первого сигнала в прямом и обратном направлении, принимать информацию указания, передаваемую UE для указания длительности первого времени реакции.
[0094] В одном варианте осуществления изобретения второй модуль 120 определения содержит третий субмодуль 123 определения и четвертый субмодуль 124 определения.
[0095] Третий субмодуль 123 определения сконфигурирован для определения времени прохождения второго сигнала в прямом и обратном направлении между обслуживающим спутником NTN и UE путем вычитания длительности второго времени реакции обслуживающего спутника NTN из длительности второго интервала между третьим моментом, когда UE передает третий сигнал позиционирования на обслуживающий спутник NTN, и четвертым моментом, когда UE принимает четвертый сигнал позиционирования, передаваемый обслуживающим спутником NTN, причем четвертый сигнал позиционирования передается обслуживающим спутником NTN в ответ на прием третьего сигнала позиционирования, а длительность второго времени реакции включает в себя временной интервал между моментом, когда третий сигнал позиционирования принимается обслуживающим спутником NTN, и моментом, когда передается четвертый сигнал позиционирования.
[0096] Четвертый субмодуль 124 определения сконфигурирован для определения расстояния между обслуживающим спутником NTN и UE на основе времени прохождения второго сигнала в прямом и обратном направлении.
[0097] В одном варианте осуществления изобретения устройство 100 дополнительно содержит второй приемный модуль 140, сконфигурированный так, чтобы, в ответ на определение оборудованием UE расстояния между обслуживающим спутником NTN и UE на основе времени прохождения второго сигнала в прямом и обратном направлении, принимать информацию указания, передаваемую обслуживающим спутником NTN для указания третьего момента и четвертого момента.
[0098] В одном варианте осуществления изобретения, обслуживающие UE спутники NTN по меньшей мере в три разных момента включают в себя по меньшей мере два спутника с разными спутниковыми орбитами.
[0099] В вариантах осуществления изобретения первый модуль 110 определения, второй модуль 120 определения, первый приемный модуль 130 и второй приемный модуль 140 могут быть реализованы одним или более центральными процессорами (Central Processing Units, CPU), графическими процессорами (Graphics Processing Unit, GPU), процессорами основной полосы частот (Baseband Processor, BP), специализированными интегральными схемами (Application Specific Integrated Circuit, ASIC), процессорами цифровой обработки сигналов (Digital Signal Processor,DSP), программируемыми логическими устройствами (Programmable Logic Devices, PLD), сложными устройствами с программируемой логикой (Complex Programmable Logic Device, CPLD), программируемыми пользователем вентильными матрицами (Field-Programmable Gate Array, FPGA), процессорами общего назначения, контроллерами, блоками микроконтроллеров (Micro Controller Unit, MCU), микропроцессорами или другими электронными компонентами, и могут быть использованы для реализации описанного выше способа.
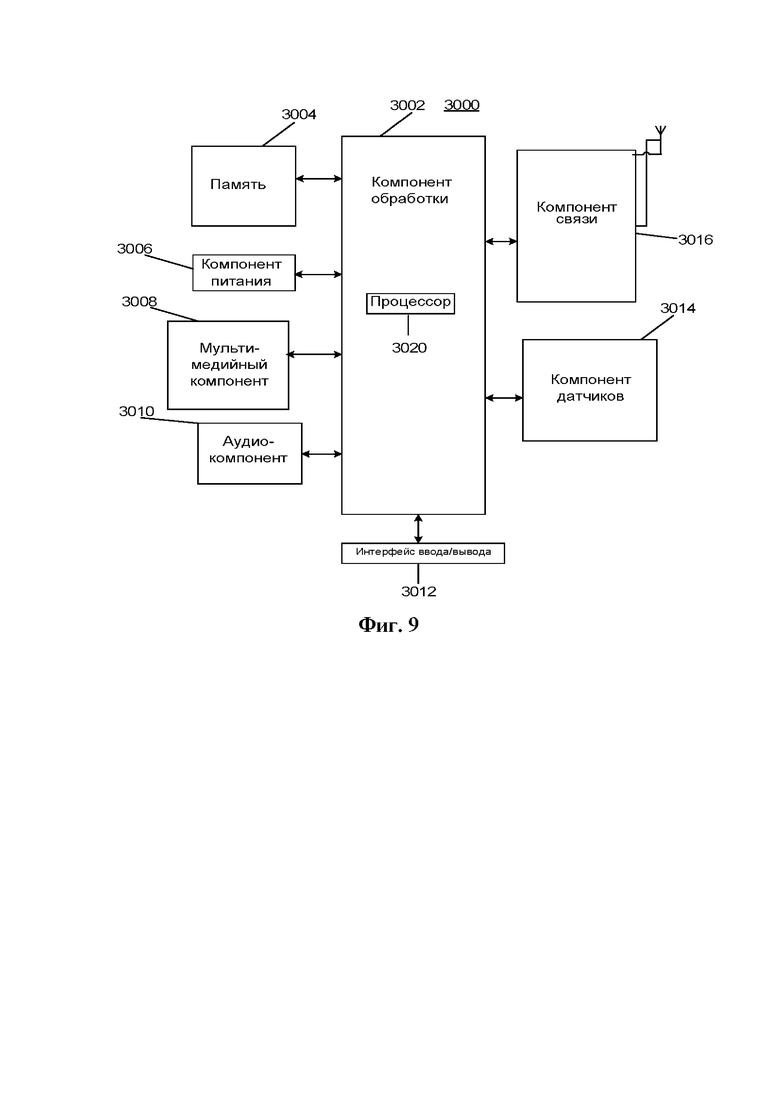
[00100] Фиг. 9 представляет собой блок-схему, иллюстрирующую устройство 3000 связи в соответствии с вариантом осуществления изобретения. Например, устройство 3000 может быть мобильным телефоном, компьютером, терминалом цифрового вещания, устройством приема и передачи сообщений, игровой приставкой, планшетным устройством, медицинским устройством, устройством для фитнеса и персональным цифровым помощником.
[00101] Как показано на фиг. 9, устройство 3000 может содержать один или более из следующих компонентов: компонент 3002 обработки, память 3004, компонент 3006 питания, мультимедийный компонент 3008, аудиокомпонент 3010, интерфейс 3012 ввода/вывода (Input/Output, I/O), компонент 3014 датчиков и компонент 3016 связи.
[00102] Компонент 3002 обработки, как правило, управляет всей работой устройства 3000, включающей операции, связанные с отображением, телефонными вызовами, передачей данных, работой камеры и операциями записи. Компонент 3002 обработки может содержать один или более процессоров 3020 для выполнения всех или части шагов вышеописанного способа. Кроме того, компонент 3002 обработки может содержать один или более модулей, которые обеспечивают взаимодействие между компонентом 3002 обработки и другими компонентами. Например, компонент 3002 обработки может содержать мультимедийный модуль для обеспечения взаимодействия между мультимедийным компонентом 3008 и компонентом 3002 обработки.
[00103] Память 3004 сконфигурирована для хранения различных типов данных для поддержки работы устройства 3000. Примеры таких данных включают в себя команды для любых приложений или способов, используемых в устройстве 3000, контактные данные, данные телефонной книги, сообщения, изображения, видеоданные и т.п. Память 3004 может быть реализована с использованием энергозависимых или энергонезависимых запоминающих устройств любого типа или их комбинации таких как статическая оперативная память (Static Random Access Memory, SRAM), электрически стираемая программируемая постоянная память (Electrically Erasable Programmable Read-Only Memory, EEPROM), стираемая программируемая постоянная память (Erasable Programmable Read-Only Memory, EPROM), программируемая постоянная память (Programmable Read-Only Memory, PROM), постоянная память (Read-Only Memory, ROM), магнитная память, флэш-память, магнитный или оптический диск.
[00104] Компонент 3006 питания обеспечивает питание различных компонентов устройства 3000. Компонент 3006 питания может содержать систему управления питанием, один или несколько источников питания и любые другие компоненты, связанные с выработкой, управлением и распределением питания в устройстве 3000.
[00105] Мультимедийный компонент 3008 содержит экран, обеспечивающий выходной интерфейс между устройством 3000 и пользователем. В некоторых вариантах осуществления изобретения экран может представлять собой жидкокристаллический дисплей (LCD, Liquid Crystal Display) и сенсорную панель (TP, Touch Panel). Если экран представляет собой сенсорную панель, экран может быть реализован как сенсорный экран для приема входных сигналов от пользователя. Сенсорная панель содержит один или более тактильных датчиков для распознавания прикосновений, скольжений и жестов на сенсорной панели. Тактильные датчики могут не только воспринимать область прикосновения или скольжения, но также определять длительность и давление, связанные с операциями прикосновения или скольжения. В некоторых вариантах осуществления изобретения мультимедийный компонент 3008 содержит фронтальную камеру и/или тыловую камеру. Фронтальная камера и/или тыловая камера могут принимать внешние мультимедийные данные при нахождении устройства 3000 в рабочем режиме, таком как режим фотографирования или режим видеосъемки. Каждая из фронтальной и тыловой камер может оснащаться фиксированной системой оптических линз или иметь возможности оптической фокусировки и изменения масштаба изображения.
[00106] Аудиокомпонент 3010 сконфигурирован для вывода и/или ввода звуковых сигналов. Например, аудиокомпонент 3010 включает в себя микрофон (MIC), сконфигурированный для приема внешнего звукового сигнала, когда устройство 3000 находится в рабочем режиме, таком как режим вызова, режим записи и режим распознавания голоса. Принятый звуковой сигнал далее может сохраняться в памяти 3004 или передаваться через компонент 3016 связи. В некоторых вариантах осуществления изобретения аудиокомпонент 3010 дополнительно содержит гдинамик, предназначенный для вывода звуковых сигналов.
[00107] Интерфейс 3012 ввода/вывода (I/O) обеспечивает интерфейс между компонентом 3002 обработки и модулями периферийного интерфейса, такими как клавиатура, нажимное колесико мыши, кнопки и т.п.Эти кнопки могут включать в себя, помимо прочего, кнопку "Домой", кнопку регулировки громкости, кнопку запуска и кнопку блокировки.
[00108] Компонент 3014 датчиков содержит один или более датчиков для получения оценок различных аспектов работы устройства 3000. Например, компонент 3014 датчиков может обнаруживать состояние открытия/закрытия устройства 3000, относительное позиционирование компонентов, например, дисплея и клавиатуры устройства 3000, изменение позиции устройства 3000 или его компонента, наличие или отсутствие контакта пользователя с устройством 3000, ориентация или ускорение/замедление устройства 3000 и изменение температуры устройства 3000. Компонент 3014 датчиков может содержать датчик приближения, сконфигурированный для обнаружения присутствия близлежащих объектов без какого-либо физического контакта с ними. Компонент 3014 датчиков может также содержать оптический датчик, такой как датчик изображений на основе комплементарной структуры "метал-оксид-полупроводник" (Complementary Metal Oxide Semiconductor, CMOS) или на приборе с зарядовой связью (Charge Coupled Device, CCD), для использования в приложениях формирования изображений. В некоторых вариантах осуществления изобретения компонент 3014 датчиков может также содержать датчик ускорения, гиродатчик, магнитный датчик, датчик давления или датчик температуры.
[00109] Компонент 3016 связи сконфигурирован для обеспечения проводной или беспроводной связи между устройством 3000 и другими устройствами. Устройство 3000 может получить доступ к беспроводной сети на основе таких стандартов связи как WiFi, сеть второго поколения (2-th Generation, 2G), сеть третьего поколения (3-rd Generation, 3G) или их комбинации. В варианте осуществления изобретения компонент 3016 связи принимает широковещательный сигнал или информацию, связанную с широковещательной передачей, от внешней системы управления широковещательной передачей по широковещательному каналу. В одном варианте осуществления изобретения компонент 3016 связи дополнительно содержит также модуль беспроводной связи ближнего радиуса действия (Near Field Communication, NFC) для обеспечения связи на малых расстояниях. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (Radio Frequency Identification, RFID), технологии, разработанной ассоциацией по средствам передачи данных в инфракрасном диапазоне (Infrared Data Association, IrDA), технологии сверхширокополосной (Ultra-Wideband, UWB) связи, технологии Bluetooth (ВТ) и других технологий.
[00110] В некоторых вариантах осуществления изобретения устройство 3000 может быть реализовано с использованием одной или более специализированных интегральных схем (ASIC), процессоров цифровой обработки сигналов (DSP), устройств цифровой обработки сигналов (Digital Signal Processing Device, DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов для выполнения описанного выше способа.
[00111] В некоторых вариантах осуществления изобретения предлагается также машиночитаемый носитель данных, такой как память 3004, содержащая исполняемые команды, исполняемые процессором 3020 в устройстве 3000 для выполнения вышеописанного способа. Например, машиночитаемый носитель данных может представлять собой постоянную память (ROM), оперативное оперативную память (Random Access Memory, RAM), компакт-диск, предназначенный только для чтения (Compact Disk Read Only Memory, CD-ROM), магнитную ленту, гибкий диск и оптическое устройство хранения данных.
[00112] Другие варианты осуществления изобретения будут очевидны специалистам в данной области техники из рассмотрения описания и применения раскрытого здесь изобретения. Настоящая заявка предназначена для охвата любых вариантов, вариантов использования или адаптаций изобретения в соответствии с его общими принципами, включая такие отступления от настоящего описания, которые входят в известную или обычную практику в данной области техники. Предполагается, что описание и примеры следует рассматривать только как иллюстративные, а истинный объем и сущность изобретения указаны в следующей формуле изобретения.
[00113] Следует понимать, что изобретение не ограничивается точной структурой, которая была описана выше и проиллюстрирована на прилагаемых чертежах, и что могут быть сделаны различные модификации и изменения, не выходящие за рамки его объема. Предполагается, что объем настоящего изобретения ограничивается только прилагаемой формулой изобретения.
Изобретение относится к области беспроводной связи. Техническим результатом является повышение точности определения местоположения пользовательского оборудования (UE). Упомянутый технический результат достигается за счет того, что UE или обслуживающие UE спутники неназемных сетей (NTN) в разные моменты времени определяют информацию о местоположении UE на основе расстояний между UE и обслуживающими спутниками NTN по меньшей мере в три разных момента времени и информацию о местоположении обслуживающих спутников NTN в эти по меньшей мере три разных момента времени. Орбитальные местоположения обслуживающих спутников NTN в упомянутые по меньшей мере три разных момента времени различны, и орбитальные местоположения обслуживающих спутников NTN принадлежат по меньшей мере двум разным спутниковым орбитам. 3 н. и 12 з.п. ф-лы, 9 ил.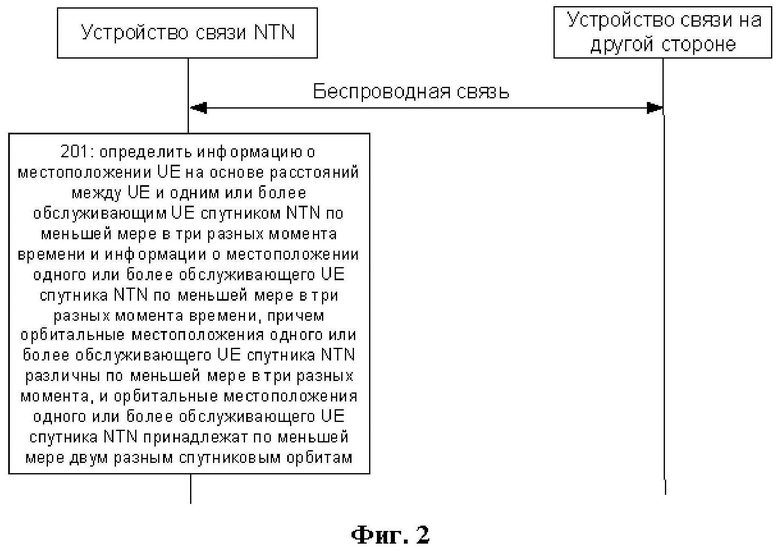
1. Способ определения местоположения, включающий:
определение информации о местоположении пользовательского оборудования (UE) на основе расстояний между UE и одним или более обслуживающим UE спутником неназемных сетей (NTN) по меньшей мере в три разных момента времени и информации о местоположении одного или более обслуживающего UE спутника NTN в упомянутые по меньшей мере три разных момента времени; причем орбитальные местоположения одного или более обслуживающего UE спутника NTN в упомянутые по меньшей мере три разных момента времени различны, и орбитальные местоположения одного или более обслуживающего UE спутника NTN принадлежат по меньшей мере двум разным спутниковым орбитам.
2. Способ по п. 1, дополнительно включающий:
определение расстояния между обслуживающим спутником NTN и UE на основе времени прохождения сигнала между UE и обслуживающим спутником NTN.
3. Способ по п. 2, в котором определение расстояния между обслуживающим спутником NTN и UE на основе времени прохождения сигнала между UE и обслуживающим спутником NTN включает:
определение времени прохождения первого сигнала в прямом и обратном направлении между обслуживающим спутником NTN и UE путем вычитания длительности первого времени реакции UE из длительности первого интервала между первым моментом, когда обслуживающий спутник NTN передает первый сигнал позиционирования в UE, и вторым моментом, когда обслуживающий спутник NTN принимает второй сигнал позиционирования, передаваемый из UE; при этом UE передает второй сигнал позиционирования в ответ на прием первого сигнала позиционирования, а длительность первого времени реакции UE включает временной интервал между временем, когда UE принимает первый сигнал позиционирования, и временем, когда передается второй сигнал позиционирования; и
определение расстояния между обслуживающим спутником NTN и UE на основе времени прохождения первого сигнала в прямом и обратном направлении.
4. Способ по п. 3, в котором, в ответ на определение обслуживающим спутником NTN расстояния между обслуживающим спутником NTN и UE на основе времени прохождения первого сигнала в прямом и обратном направлении, способ дополнительно включает прием обслуживающим спутником NTN информации указания, передаваемой UE для указания длительности первого времени реакции.
5. Способ по п. 2, в котором определение расстояния между обслуживающим спутником NTN и UE на основе времени прохождения сигнала между обслуживающим спутником NTN и UE включает:
определение времени прохождения второго сигнала в прямом и обратном направлении между обслуживающим спутником NTN и UE путем вычитания длительности второго времени реакции обслуживающего спутника NTN из длительности второго интервала между третьим моментом, когда UE передает третий сигнал позиционирования на обслуживающий спутник NTN, и четвертым моментом, когда UE принимает четвертый сигнал позиционирования, передаваемый обслуживающим спутником NTN, причем четвертый сигнал позиционирования передается обслуживающим спутником NTN в ответ на прием третьего сигнала позиционирования, а длительность второго времени реакции включает временной интервал между моментом, когда третий сигнал позиционирования принимается обслуживающим спутником NTN, и моментом, когда передается четвертый сигнал позиционирования; и
определение расстояния между обслуживающим спутником NTN и UE на основе времени прохождения второго сигнала в прямом и обратном направлении.
6. Способ по п. 5, в котором, в ответ на определение в UE расстояния между обслуживающим спутником NTN и UE на основе времени прохождения второго сигнала в прямом и обратном направлении, способ дополнительно включает прием в UE информации указания, передаваемой обслуживающим спутником NTN для указания упомянутой длительности второго времени реакции.
7. Способ по любому из пп. 1-6, в котором упомянутые один или более обслуживающие UE спутники NTN по меньшей мере в три разных момента времени содержат по меньшей мере два спутника с разными спутниковыми орбитами.
8. Устройство для определения местоположения, содержащее:
первый модуль определения, сконфигурированный для определения информации о местоположении пользовательского оборудования (UE) на основе расстояний между UE и одним или более обслуживающим спутником(ами) неназемных сетей (NTN) по меньшей мере в три разных момента времени и информации о местоположении одного или более обслуживающего UE спутника NTN в упомянутые по меньшей мере три разных момента времени, причем орбитальные местоположения одного или более обслуживающего UE спутника NTN различны в упомянутые по меньшей мере три разных момента времени, и орбитальные местоположения одного или более обслуживающего UE спутника NTN принадлежат по меньшей мере двум разным спутниковым орбитам.
9. Устройство по п. 8, дополнительно содержащее:
второй модуль определения, сконфигурированный для определения расстояния между обслуживающим спутником NTN и UE на основе времени прохождения сигнала между UE и обслуживающим спутником NTN.
10. Устройство по п. 9, в котором второй модуль определения содержит:
первый субмодуль определения, сконфигурированный для определения времени прохождения первого сигнала в прямом и обратном направлении между обслуживающим спутником NTN и UE путем вычитания длительности первого времени реакции UE из длительности первого интервала между первым моментом, когда обслуживающий спутник NTN передает первый сигнал позиционирования в UE, и вторым моментом, когда обслуживающий спутник NTN принимает второй сигнал позиционирования, передаваемый из UE, при этом UE передает второй сигнал позиционирования в ответ на прием первого сигнала позиционирования, а длительность первого времени реакции включает временной интервал между временем, когда первый сигнал позиционирования принимается в UE, и временем, когда передается второй сигнал позиционирования; и
второй субмодуль определения, сконфигурированный для определения расстояния между обслуживающим спутником NTN и UE на основе времени прохождения первого сигнала в прямом и обратном направлении.
11. Устройство по п. 10, дополнительно содержащее первый приемный модуль, сконфигурированный для приема информации указания, передаваемой из UE для указания длительности первого времени реакции, в ответ на определение обслуживающим спутником NTN расстояния между обслуживающим спутником NTN и UE на основе времени прохождения первого сигнала в прямом и обратном направлении.
12. Устройство по п. 9, в котором второй модуль определения содержит:
третий субмодуль определения, сконфигурированный для определения времени прохождения второго сигнала в прямом и обратном направлении между обслуживающим спутником NTN и UE путем вычитания длительности второго времени реакции обслуживающего спутника NTN из длительности второго интервала между третьим моментом, когда UE передает третий сигнал позиционирования на обслуживающий спутник NTN, и четвертым моментом, когда UE принимает четвертый сигнал позиционирования, передаваемый обслуживающим спутником NTN, при этом четвертый сигнал позиционирования передается обслуживающим спутником NTN в ответ на прием третьего сигнала позиционирования, а длительность второго времени реакции включает временной интервал между моментом, когда третий сигнал позиционирования принимается обслуживающим спутником NTN, и моментом, когда передается четвертый сигнал позиционирования; и
четвертый субмодуль определения, сконфигурированный для определения расстояния между обслуживающим спутником NTN и UE на основе времени прохождения второго сигнала в прямом и обратном направлении.
13. Устройство по п. 12, дополнительно содержащее второй приемный модуль, сконфигурированный так, чтобы, в ответ на определение в UE расстояния между обслуживающим спутником NTN и UE на основе времени прохождения второго сигнала в прямом и обратном направлении, принимать информацию указания, передаваемую обслуживающим спутником NTN для указания упомянутой длительности второго времени реакции.
14. Устройство по любому из пп. 8-13, в котором упомянутые один или более обслуживающие UE спутники NTN по меньшей мере в три разных момента содержат по меньшей мере два спутника с разными спутниковыми орбитами.
15. Устройство связи, содержащее процессор, память и исполняемую программу, хранящуюся в памяти и исполняемую процессором, при этом, когда исполняемая программа выполняется процессором, выполняется способ определения местоположения по любому из пп. 1-7.
| US 6195042 B1, 27.02.2001 | |||
| CN 109084762 A, 25.12.2018 | |||
| CN 111158034 A, 15.05.2020 | |||
| СПОСОБ И СИСТЕМА ГЕОЛОКАЛИЗАЦИИ РАДИОМАЯКА В СИСТЕМЕ ТРЕВОЖНОГО ОПОВЕЩЕНИЯ И СПАСЕНИЯ | 2011 |
|
RU2590903C2 |
| WO 2020092561 A1, 07.05.2020 | |||
| WO 2020222122 A1, 05.11.2020 | |||
| СИСТЕМА, СПОСОБ И ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ В СИСТЕМЕ ОДНОЗНАЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ДВУХ СПУТНИКОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 1997 |
|
RU2256935C2 |

