Изобретение относится к сельскому хозяйству, в частности к беспилотным летательным аппаратам для внесения отравленных приманок для борьбы с грызунами на сельскохозяйственных угодьях в системе точного земледелия.
Известен разбрасыватель отравленных приманок для летательных аппаратов, содержащий бункер, разделенный на отсеки, нижний отсек с высевным окном, верхний отсек в виде емкости для приманки с разным наклоном стенок и загрузочной крышкой, установленный в верхнем отсеке приводной вал, размещенный по центральной оси бункера, при этом приводной вал через угловой червячный привод соединен с мотором в виде шагового электродвигателя, закрепленным на стенке бункера, в нижней части на приводном валу установлены две лопасти высотой 0,8-1,2размера приманки, отстоящие от стенок бункера на расстояние 0,2-0,4 размера приманки и подающие приманку в высевное окно, при этом верхний отсек бункера имеет форму конуса с разными углами наклона стенок, а нижний отсек бункера выполнен в форме прямоугольного короба высотой 3,5-4,0 размера приманки, шириной2,5-2,6 размера приманки, толщиной 1,2-1,5 размера приманки, причем в нижнем отсеке установлена горизонтальная перегородка с высевным окном, имеющая сглаженные поверхности сопряжения с правой и левой боковыми стенками нижнего отсека радиусом сопряжения, равным 1,3-1,4 размера приманки, перегородка разделяет нижний отсек бункера на две части, в нижней части нижнего отсека бункера установлена 4-лопастная крыльчатка, приводимая в ступенчатое - через 90 градусов - вращение шаговым двигателем по направлению против часовой стрелки, причем шаговый двигатель крыльчатки и шаговый двигатель приводного вала в верхнем отсеке бункера подключены параллельно через 3-позиционный переключатель к источнику электрического напряжения, кроме того, поверхность сопряжения днища и левой боковой стенки нижнего отсека бункера также выполнена сглаженной с радиусом сопряжения, равным 1,3-1,4 размера приманки, на нижнем отсеке бункера установлены две светодиодные системы контроля выгрузки приманок в виде оптико-электронного устройства охранной сигнализации, одна из которых установлена под высевным окном горизонтальной перегородки, вторая - в финишном высевном окне сброса приманок, при этом размеры высевного окна горизонтальной перегородки и финишного высевного окна составляют 1,2-1,4 размера приманки (патент RU 206835 U1,A01C 15/08, 2020).
Недостатками известного устройства являются повышенное аэродинамическое сопротивление при использовании его на летательных аппаратах, что влияет на скорость полета летательного аппарата при заданных параметрах двигательной установки, усложнение конструкции, включающей при прочих равных условиях два шаговых двигателя, излишняя материалоемкость, несовершенство конструкции высевающего аппарата, что предопределяет его забиваемость, а также невозможность работы в системе точного земледелия.
Известен родентицидный коптер для точечного внесения отравленной приманки, содержащий несущее устройство - сельскохозяйственный коптер, состоящий из рамы со встроенными контроллером, навигационным модулем и радиоволновым сонаром, литий-полимерного аккумулятора, электромоторов бесколлекторного типа с электронными регуляторами оборотов, пропеллеров, радиоприемника с антенной, посадочно-сцепного шасси, при этом к нижней части рамы шарнирно прикреплен стабилизационный подвес с цифровой автоматической камерой и электромотором наклона камеры в вертикальной плоскости, и исполнительное устройство - приспособление для точечного внесения отравленной приманки, смонтированное в нижней части посадочно-сцепного шасси, состоящее из бункера, катушечного высевающего аппарата, электромотора коллекторного типа с электронным регулятором оборотов и зацепов (патент RU 180524 U1,A01M 25/00, 2017).
Недостатком известного устройства является забиваемость высевающего аппарата, повреждение оболочки и дробление гранул приманки, необходимость использовать только определенного размера гранулы, сегрегация материала поскольку эффекты сегрегации обнаруживаются практически в любой зернистой среде, так как идеально однородных зернистых материалов практически не существует, что снижает качество и эффективность выполнения технологического процесса рассева приманок, при этом выполнение бункера приспособления для внесения отравленной приманки четырехугольной формы, суженной внизу, вызывает излишние аэродинамические сопротивления при полете беспилотного летательного аппарата и, как следствие, повышенные затраты энергии на полет.
Технической задачей изобретения является повышение эффективности использования отравленных приманок при внесении их беспилотным летательным аппаратом, обеспечение целевого внесения приманок в системе точного земледелия.
Поставленная техническая задача достигается тем, что в беспилотном летательном аппарате для внесения отравленных приманок на сельскохозяйственных угодьях, содержащем корпус, соединенные с ним радиальные кронштейны, двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой, технологический модуль полезной нагрузки в виде гравитационного бункера-дозатора с приводным устройством вала и подвешенного к корпусу беспилотного летательного аппарата посредством кронштейнов с загрузочным люком, выходным патрубком с бесконтактными микроволновыми датчиками, согласно изобретения, бункер-дозатор выполнен сферической формы с вертикальной осью симметрии, проходящей через центр масс беспилотного летательного аппарата, а приводное устройство приводного вала соединено линией связи с модулем программного обеспечения управления работой технологического модуля полезной нагрузки, при этом приводной вал снабжен мешалкой-ворошителем в виде кругового кольца с внутренними горизонтальными ребрами, причем приводной вал выполнен по форме тарельчатого клапана с радиусом сопряжения приводного вала и тарелки, по крайней мере равным или меньше высоты установки мешалки-ворошителя над днищем бункера-дозатора, а к тарелке прикреплен дозирующий диск, имеющий форму сферического сегмента, сопряженного с нижней сферической частью корпуса бункера-дозатора, на всех осевых линиях дозирующего диска, кроме одной, выполнены дозирующий отверстия, при этом осевые линии равномерно распределены и повернуты относительно друг друга на угол не превышающий 45°, эффективное проходное сечение каждого последующего больше отверстия в два раз больше предыдущего.
Изобретение поясняется чертежами.
На фиг. 1 изображен беспилотный летательный аппарат для внесения отравленных приманок; на фиг.2 изображен вертикальный разрез бункера- дозатора; на фиг. 3 изображен горизонтальный разрез А-А на фиг. 2.
Беспилотный летательный аппарат (БЛА) 1 для внесения отравленных приманок содержит корпус 2, соединенные с ним радиальные кронштейны 3, двигатели 4, винты 5, аккумулятор 6, посадочное шасси 7, бортовую систему автоматического управления 8 пилотированием, навигацией и полезной нагрузкой, технологический модуль 9 полезной нагрузки для размещения, дозирования и распределения отравленных приманок, подвешенный к корпусу 2 посредством кронштейнов 10. Бортовая система автоматического управления (САУ) 8 содержит полетный контроллер с процессором, связанным с модулем программного обеспечения управления полетом БЛА и модулем программного обеспечения управления работой технологического модуля 9 полезной нагрузки, комплексированную с процессором контроллера интегрированную навигационную систему, включающую модуль инерциальной навигационной системы, объединенный с модулем спутниковой навигационной системы в виде приемника ГЛОНАСС (не показано) с антенной 11. Полетный контроллер комплексирован с блоками автоматического управления исполнительными механизмами двигателей 4, блоком управления работой технологического модуля 9 полезной нагрузки, с модулями датчиков внешней среды и измерения высоты полета (не показано).
Технологический модуль 9 полезной нагрузки содержит гравитационный бункер-дозатор 12, выполненный сферической формы с вертикальной осью симметрии a-a, проходящей через центр масс БЛА с загрузочным люком 13, выпускным отверстием 14 продольным вдоль оси n0-n0, соединенным с выходным патрубком 15 бункера дозатора 12 и бесконтактными микроволновыми датчиками 16, установленными на патрубке 15. Продольные оси датчиков 16 перпендикулярны вертикальной оси симметрии а-а. Сверху на бункере-дозатора 12 закреплено приводное устройство 17 (электрошаговый двигатель), связанное линией связи (не показано) с модулем программного обеспечения управления работой технологического модуля 9 полезной нагрузки и соединенное с приводным валом 18, установленным внутри бункера-дозатора 12 по оси симметрии а-а и выполненным в форме тарельчатого клапана, состоящим из, собственно, вала 18 и круглой тарелки 19 с радиусом R, обеспечивающим плавное сопряжения приводного вала 18 и тарелки 19. На вал 18 насажена мешалка-ворошитель 20, выполненная в виде кругового кольца 21 с внутренними горизонтальными ребрами 22, при этом радиус R сопряжения приводного вала 18 и тарелки 19, по крайней мере, равен или меньше высоты установки h мешалки-ворошителя 20 над днищем 23 бункера - дозатора 12.
К тарелке 19 вала 18 прикреплен дозирующий диск 24, выполненный в виде сферического сегмента 25, сопряженного с нижней сферической частью 26 бункера-дозатора 12.
Дозирующий диск 24 имеет продольные дозирующие отверстия 27, состоящие из двух дуг окружностей, соединенных прямыми линиями, выполненными симметрично от центра диска О и лежащие на осях n-n, равномерно повернутых одна относительно другой на угол α не более чем 45°, кроме одной оси о-о, вдоль которой дозирующие отверстия отсутствуют, при этом эффективное проходное сечение каждого последующего отверстия, начиная с наименьшего, в два раз больше предыдущего. Механизм привода 17 соединен линией связи (не показано) с модулем программного обеспечения управления работой технологического модуля 9 полезной нагрузки.
Выполнение бункера-дозатора 12 сферической формы с вертикальной осью симметрии a-a, проходящей через центр масс БЛА 1 позволяет минимизировать аэродинамическое сопротивление БЛА1 при его полете.
Соединение приводного устройства 17 линией связи с модулем программного обеспечения управления работой технологического модуля полезной нагрузки позволяет управлять дозированием материала отравленной приманки в зависимости от численности популяции вредных грызунов, их жилых нор, зафиксированных в электронной карте-задания обработки сельскохозяйственного поля родентицидами.
Выполнение мешалки-ворошителя 20 в виде кругового кольца 21 с внутренними горизонтальными ребрами 22, приводного вала18 по форме тарельчатого клапана, с радиусом сопряжения R приводного вала 18 и тарелки 19 по крайней мере равным или меньшим высоте h установки мешалки-ворошителя 20 над днищем 23 бункера - дозатора 12, дозирующего диска 24 в форме сферического сегмента 25, сопрягаемого с нижней сферической частью 26 бункера-дозатора 12 предотвращает сводообразование материала отравленной приманки в бункере дозаторе, предотвращает эффекты сегрегации и обеспечивает его равномерное поступление в дозирующие отверстия.
Выполнение дозирующего диска 24 с продольными дозирующими отверстиями 27, выполненными по осям, равномерно повернутым одна относительно другой на угол не более 45°, кроме одной оси о-о, вдоль которой дозирующие отверстия отсутствуют, позволяет иметь необходимое и достаточное количество дозирующих отверстий для дозирования материала приманок, что уменьшает время подачи приманок к месту (норам) обитания грызунов.
Выполнение эффективного проходного сечения каждого последующего отверстия начиная с наименьшего, в два раз больше предыдущего, позволяет осуществлять дискретное дозирование, управляемое от шагового двигателя по заданной программе.
Беспилотный летательный аппарат для внесения отравленных приманок работает следующим образом.
В процессор полетного контроллера БЛА 1 загружают полетное задание, в котором отображают в электронном виде параметры маршрута полета и электронную карту-задание, являющиеся программой обработки. Для обработки устанавливают границы, площадь, длину гона, координаты очагов заражения сельскохозяйственного поля (норы, городища), нормы внесения отравленных приманок, координаты стартовой точки и координаты точки окончания обработки, рабочую скорость и высоту полета, наименьшую рабочую траекторию полета, координаты посадочной площадки для заправки бункера дозатора 12 отравленной приманкой и замены аккумуляторной батареи 6.
В бункер дозатора 12 через загрузочный люк 13 в соответствии с электронной картой - заданием загружают приманку.
От контроллера сигнал передаётся в блок системы автоматического управления полетом, запускаются двигатели 4, производится раскрутка несущих винтов 5 и двигатели 4 переводятся во взлетный режим. Производится вертикальный взлет БЛА 1. БЛА 1 в соответствии с программой полета, подлетает к точке стартовых координат начала обработки, при этом координаты, определяемые интегрированной навигационной системой, сравниваются с заданными координатами, введенными в программу траекторного полета.
Модуль датчиков внешней среды передает информацию в процессор контроллера о параметрах внешней среды (скорости и направлении ветра, атмосферном давлении, температуре и влажности воздуха). Модуль измерения высоты полета передает на процессор контроллера текущее значение высоты полета БЛА 1.
При подлете БЛА 1 к очагу поражения грызунами БЛА 1 зависает над местом сброса приманки и снижается до заданной высоты. При этом ось o-o дозирующего диска 24 совпадает с осью n0-n0выпускного отверстия 14 днища 23 бункера - дозатора 12.
Бортовой контроллер передает управляющий сигнал на включение в работу приводного устройства 17. Приводное устройство 17 включается и посредством поворота вала 18 поворачивает дозирующий диск 24 из положения о-о в заданное рабочее положение n-n. При этом, вследствие поворота мешалки-ворошителя 20 происходит перемешивание материала приманки, что предотвращает его сводообразование и сегрегацию. Масса материала приманки высыпается через отверстия 27 и выпускное отверстие 14 на заданный участок сельскохозяйственного поля за заданный временной цикл. Датчики 16 контролируют поток материала приманки. По истечении заданного времени по сигналу от контроллера приводное устройство 17 поворачивает диск 24 из положения n-n в положение о-о, выходное отверстие 14 перекрывается и поступление приманки заданный участок прекращается. БЛА 1 поднимается и перелетает по заданной траектории к следующему участку внесения приманки.
Целевая обработка полей родентицидами в системе точного земледелия, обеспечивает точное их внесение непосредственно на участки заселения с дифференциацией норм внесения в зависимости от численности грызунов и, как следствие, минимизирует внесение родентицидов на сельскохозяйственном поле, а также уменьшает загрязнение окружающей среды родентицидами до предельно допустимых концентраций.



Беспилотный летательный аппарат для внесения отравленных приманок на сельскохозяйственных угодьях содержит корпус с прикрепленными к нему радиальными кронштейнами, двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой, технологический модуль полезной нагрузки в виде гравитационного бункера-дозатора с приводным валом, и подвешенного к корпусу беспилотного летательного аппарата посредством кронштейнов с загрузочным люком, выходным патрубком с бесконтактными микроволновыми датчиками, и выполненного в виде сферической формы с вертикальной осью симметрии, проходящей через центр масс беспилотного летательного аппарата. Приводной вал содержит мешалку-ворошитель в виде кругового кольца в форме тарелки с внутренними горизонтальными ребрами. К тарелке прикреплен дозирующий диск, имеющий форму сферического сегмента, сопряженного с нижней сферической частью корпуса бункера-дозатора, и имеющий выполненные определенным образом дозирующие отверстия. Обеспечивается повышение эффективности использования отравленных приманок и целевое их использования за счет применения беспилотного летательного аппарата. 3 ил.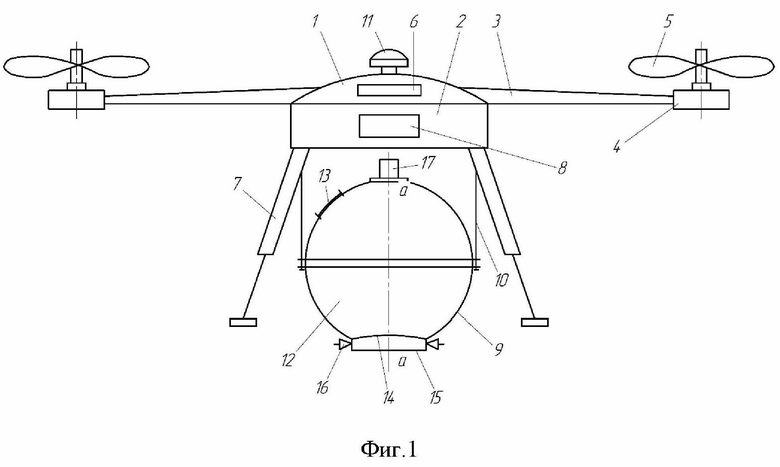
Беспилотный летательный аппарат для внесения отравленных приманок на сельскохозяйственных угодьях, содержащий корпус, соединенные с ним радиальные кронштейны, двигатели, винты, аккумулятор, посадочное шасси, бортовую систему автоматического управления пилотированием, навигацией и полезной нагрузкой, технологический модуль полезной нагрузки в виде гравитационного бункера-дозатора с приводным устройством вала и подвешенного к корпусу беспилотного летательного аппарата посредством кронштейнов с загрузочным люком, выходным патрубком с бесконтактными микроволновыми датчиками, отличающийся тем, что бункер-дозатор выполнен сферической формы с вертикальной осью симметрии, проходящей через центр масс беспилотного летательного аппарата, приводное устройство приводного вала соединено линией связи с модулем программного обеспечения управления работой технологического модуля полезной нагрузки, приводной вал снабжен мешалкой-ворошителем в виде кругового кольца с внутренними горизонтальными ребрами и выполнен по форме тарельчатого клапана с радиусом сопряжения приводного вала и тарелки, по крайней мере, равным или меньше высоты установки мешалки-ворошителя над днищем бункера-дозатора, к тарелке прикреплен дозирующий диск, имеющий форму сферического сегмента, сопряженного с нижней сферической частью корпуса бункера-дозатора, на всех осях дозирующего диска, кроме одной, выполнены дозирующий отверстия, при этом осевые линии равномерно распределены и повернуты относительно друг друга на угол не превышающий 45°, эффективное проходное сечение каждого последующего больше отверстия в два раз больше предыдущего.
| ПАРОВОЗДУШНЫЙ КОВОЧНЫЙ молот | 0 |
|
SU206981A1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВКИ ДОЗИРОВКИ РАЗБРОСА, БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И НОСИТЕЛЬ ИНФОРМАЦИИ | 2020 |
|
RU2763615C1 |
| Посевной комплекс с центрально-дозирующей системой | 2018 |
|
RU2711966C1 |
| Способ внесения сыпучих средств защиты растений и комплекс для его осуществления | 2018 |
|
RU2694502C1 |
| US 11730087 B2, 22.08.2023. | |||

