Изобретение относится к подъемно-транспортному машиностроению и может быть использовано для подъема и перемещения грузов, преимущественно в стесненных условиях труднодоступных площадок.
Известно устройство для поворота конструкций колонного типа относительно опорного шарнира, в котором стойки в месте перекрестия шарнирно соединены с конструкцией колонного типа, что создает в указанных стойках существенные изгибающие усилия, приводящие к увеличению металлоемкости, снижению несущей способности, надежности и безопасности устройства (авторское свидетельство №1446101 МПК Е04Н 2/34 от 23.12.1988 г.).
Известно также грузоподъемное устройство, содержащее шарнирно-рычажную систему, рычаги, соединенные стержнями, и опорные башмаки, отличающееся тем, что устройство, имеет шарнирно-стержневой механизм, расположенный у основания устройства, который имеет верхний и нижний башмаки и шаровую опору, соединенную с осью, а боковые шарниры связаны попарно винтовыми стержнями различной длины (патент №2588414 от 03.06.2016 г. МПК В66С 1/66).
Однако в известных устройствах перекрещивающиеся рычаги на концах соединены стягивающим тросом или винтовыми стержнями, которые создают пространственную стержневую конструкцию, образующую шарнирно-стержневую систему, что существенно снижает их безопасность, надежность и универсальность при подъеме и перемещении груза в стесненных условиях.
Наиболее близким техническим решением является универсальное грузоподъемное устройство, содержащее шарнирно-стержневой механизм, который имеет блочные системы, состоящие из четырех стержней одного размера, а на осях шарниров расположены блоки, связанные между собой попарно и перекрестно полиспастами, причем на стержне между шарнирами прикреплен ручной механизм с рукояткой (патент №2747751 от 13.05.2021 г. МПК В66С 1/66).
Недостатком близкого по техническому решению устройства-прототипа являются стержни одного размера, концы которых стягиваются канатными полиспастами, связанными между собой одним канатом, что не обеспечивает синхронности их совместной работы в результате разных скоростей наматывания и разматывания каната на барабан лебедочного механизма, что снижает надежность, безопасность, мобильность и универсальность грузоподъемного устройства.
Технический результат - повышение надежности, безопасности, универсальности и технологичности грузоподъемного устройства.
Техническое решение заключается в том, что устройство содержит шарнирно-стержневой механизм, который имеет блочные системы, состоящие из четырех шарниров, установленных на концах стержней одного или разного размеров, а на осях шарниров расположены блоки, запасованные между собой, попарно и перекрестно, несвязанными полиспастами, причем на противоположных стержнях между шарнирами прикреплены механизированные или ручные лебедочные механизмы с рукоятками.
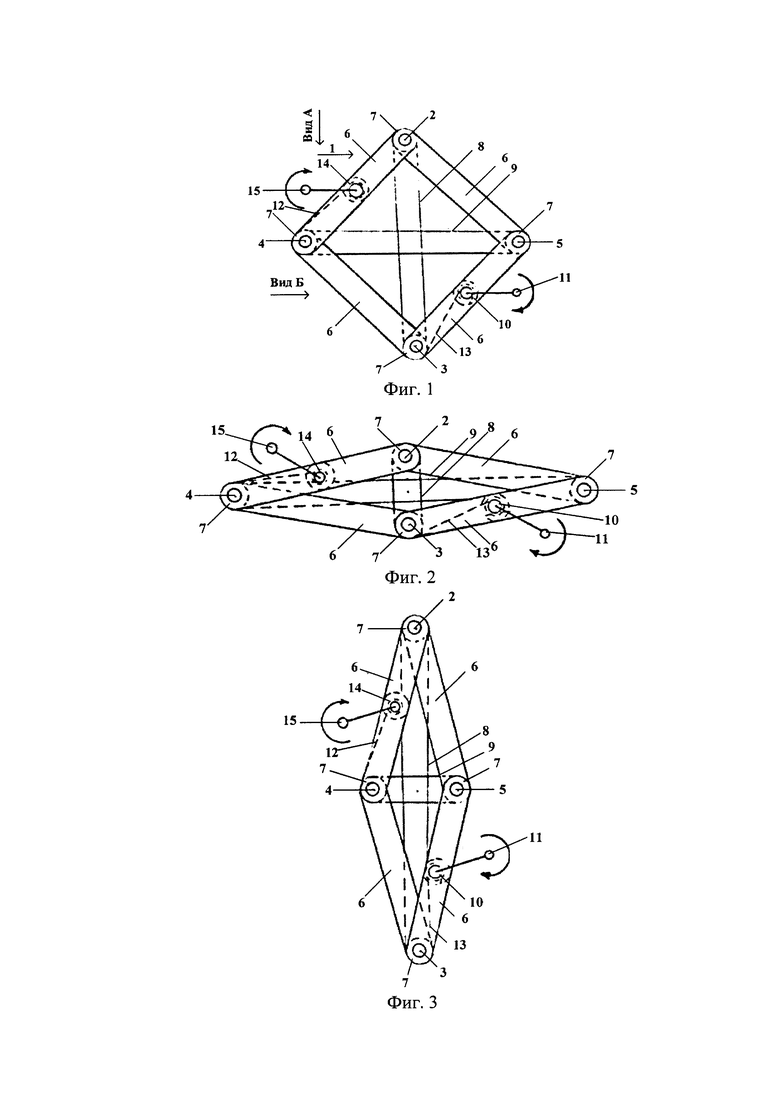
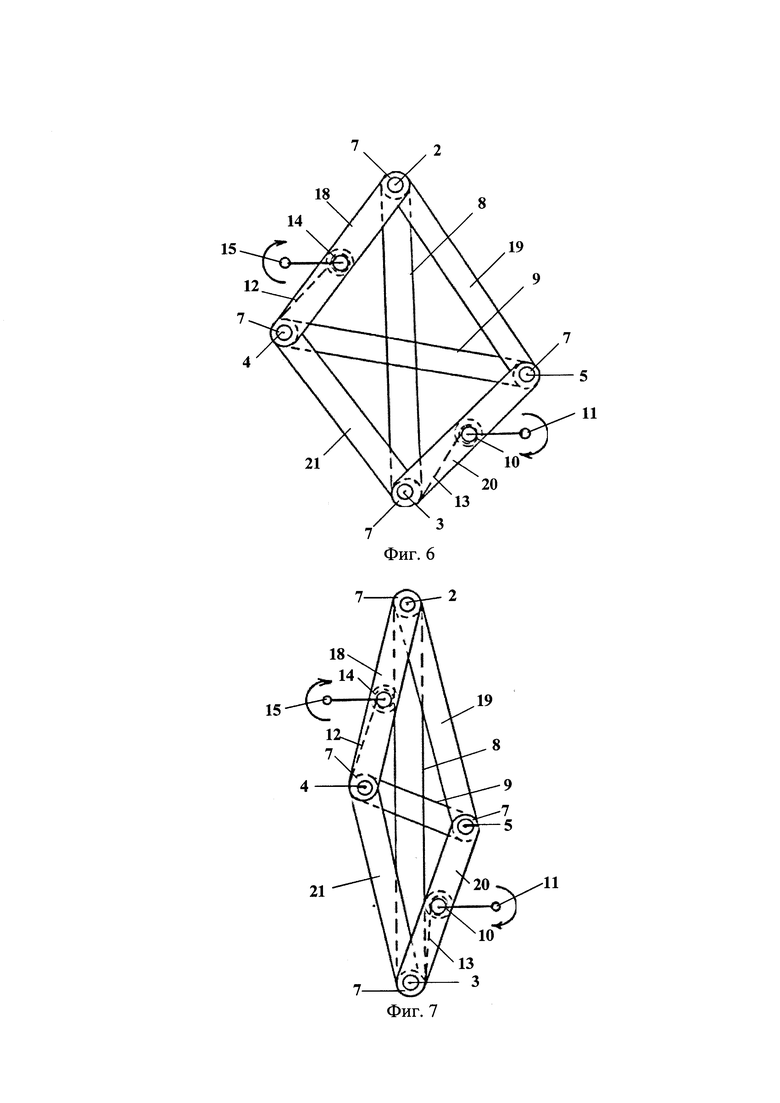
Устройство состоит из шарнирно-стержневой системы 1 (Фиг. 1), где расположены шарниры: верхний 2 и нижний 3, боковой левый 4 и боковой правый 5. Шарниры установлены на концах стержней 6 равных (Фиг. 1, Фиг. 2, Фиг. 3) или на концах стержней 18-21 разных (Фиг. 6, Фиг. 7) по размерам. На осях шарниров 2, 3, 4, 5 расположены блоки 7, запасованные между собой попарно, перекрестным образом, несвязанными полиспастами 8 и 9. На стержнях 6 между шарнирами 3 и 5 и шарнирами 4 и 2 расположены ручные лебедочные механизмы 10 и 14 с рукоятками 11 и 15 (лебедочные механизмы 10 и 14 могут быть механизированными).
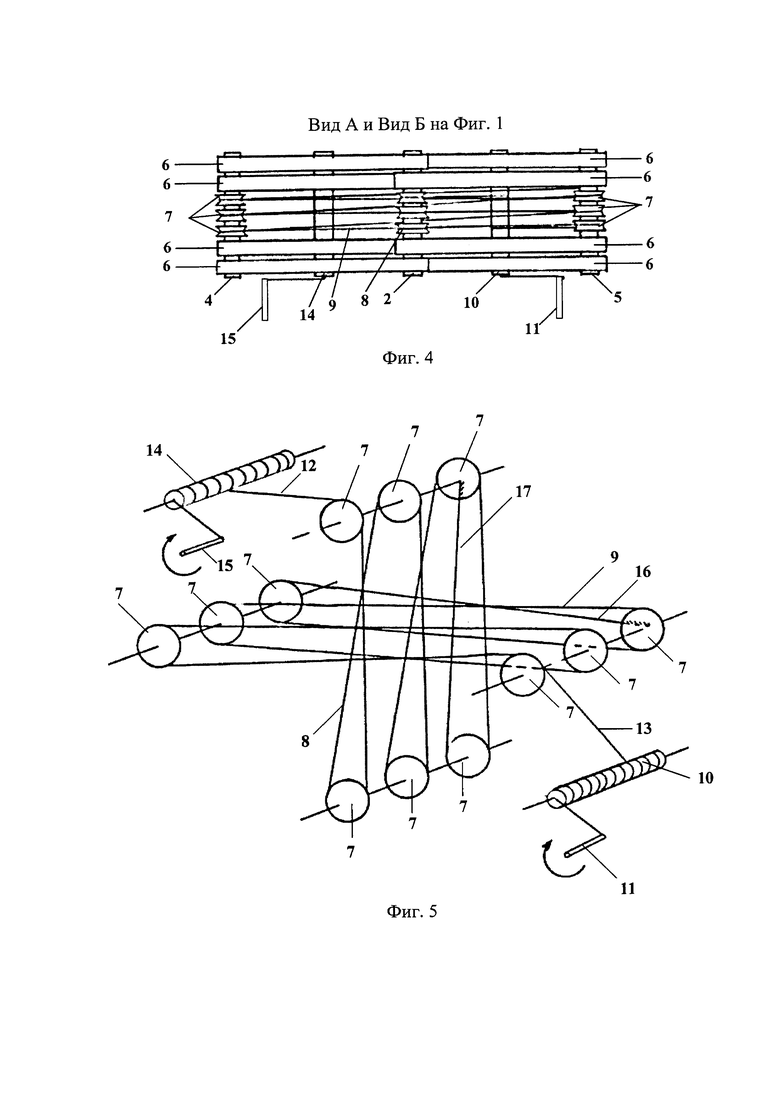
На Фиг. 1 схематически представлено универсальное грузоподъемное устройство в промежуточном положении; на Фиг. 2 - в исходном положении; на Фиг. 3 - в выдвинутом положении; на Фиг. 4 - вид А и вид Б на Фиг. 1; на Фиг. 5 - схема запасовки независимых полиспастов 8 и 9; на Фиг. 6 -промежуточное положение устройства из стержней 18, 19, 20 и 21 разных размеров; на Фиг. 7 - выдвинутое положение устройства из стержней 18, 19, 20 и 21 разных размеров.
Универсальное грузоподъемное устройство выполнено в виде выдвижного шарнирно-стержневого механизма, содержащего шарнирно-стержневую систему 1 (Фиг. 1), запасованную двумя, несвязанными между собой одним канатом, полиспастами 8 и 9.
Шарнирно-стержневая система состоит из верхнего 2 и нижнего 3 шарниров, боковых левого 4 и бокового правого 5 шарниров, которые установлены на концах стержней 6. На осях шарниров 2, 3, 4, 5 расположены блоки 7. На стержнях 6 между шарнирами 3 и 5 и шарнирами 4 и 2 расположены ручные лебедочные механизмы 10 и 14 с рукоятками 11 и 15.
Схема запасовки полиспастов 8 и 9 (Фиг. 5) включает блоки 7, через которых запасован канат, два конца которого 16 и 17 мертво закреплены на осях 2 и 5, соответственно, а другие два конца 12 и 13 выходят на ручные лебедочные механизмы 14 и 10, соответственно.
Работа универсального грузоподъемного устройства осуществляется следующим образом.
Универсальное грузоподъемное устройство устанавливается под поднимаемым или наклоняемым грузом или крепится за перемещаемый в любом направлении груз. Вращают рукояткой 11 или механизированным способом барабан лебедочного механизма 10 в направлении, указанном круговыми стрелками (Фиг. 1, Фиг. 2, Фиг. 3, Фиг. 5, Фиг. 6, Фиг. 7) при подъеме (отталкивании), а при опускании (стягивании) вращают рукояткой 15 или механизированным способом барабан лебедочного механизма 14 в направлении, указанном круговыми стрелками. При работе лебедочной системы 10 конец каната 13 полиспаста 9 наматывается на барабан, при этом полиспаст 9 сокращается, а полиспаст 8 удлиняется. Таким образом, шарниры 4 и 5 начинают сближаться друг к другу и стержни 6, равные по размерам, или стержни 18-21, разные по размерам, поворачиваются к вертикальной оси, одновременно, поднимаясь вверх и перемещая груз.
Перевод грузоподъемного устройства в исходное положение (Фиг. 2) осуществляется в следующем порядке. При работе лебедочной системы 14 конец каната 12 полиспаста 8 наматывается на барабан - при этом полиспаст 8 сокращается, а полиспаст 9 удлиняется. Таким образом шарниры 2 и 3 начинают сближаться друг к другу и стержни 6, равные по размерам, или стержни 18-21, разные по размерам, поворачиваются к горизонтальной оси, одновременно, спускаясь вниз и опуская груз.
С использованием универсального грузоподъемного устройства груз может быть перемещен как в прямом, так и в обратном направлениях.
В статическом положении устройство представляет собой единую шарнирно-стержневую систему, где стержни 6, равные по размерам, или стержни 18-21, разные по размерам, центрально сжаты, а полиспасты 8 и 9 работают, попеременно, в зависимости от выполняемой операции, на растяжение. Все стержни являются частью единой шарнирно-стержневой системы, поэтому они используются не только как силовые элементы связи, но и как элементы подъемного механизма для выдвижения (выталкивания) и опускания (стягивания) самого устройства и груза.
Благодаря тому, что концы стержней, равных и разных по размерам, стягиваются, несвязанными между собой одним канатом, полиспастами, стержни устройства нагружены центрально и в них отсутствуют изгибающие усилия и напряжения, что дает возможность уменьшить металлоемкость, увеличить несущую способность и повысить надежность, безопасность и универсальность грузоподъемного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2019 |
|
RU2747751C2 |
| Грузоподъемное устройство | 1985 |
|
SU1355604A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2015 |
|
RU2588414C1 |
| УНИВЕРСАЛЬНЫЕ СТРОИТЕЛЬНЫЕ ЛЕСА | 2023 |
|
RU2811796C1 |
| Установка для монтажа оборудования | 1984 |
|
SU1245546A1 |
| СТРЕЛОВОЙ КРАН | 1993 |
|
RU2097307C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2018 |
|
RU2690132C1 |
| Кран-трубоукладчик | 2017 |
|
RU2676998C1 |
| УСТРОЙСТВО для УРАВНОВЕШИВАНИЯ СТРЕЛОВЫХ КРАНОВ | 1973 |
|
SU385889A1 |
| Монтажное устройство | 1980 |
|
SU925856A1 |
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано для подъема и перемещения грузов в стесненных условиях труднодоступных площадок. Устройство содержит шарнирно-стержневой механизм, который имеет блочные системы, состоящие из четырех стержней одного или разного размеров, а на осях шарниров расположены блоки, запасованные, попарно и перекрестно, несвязанными между собой одним канатом, полиспастами. На стержнях между шарнирами прикреплены механизированные или ручные лебедочные механизмы с рукоятками. Достигается увеличение грузоподъемности, повышение безопасности, надежности, универсальности и технологичности при подъеме и перемещении грузов. 7 ил.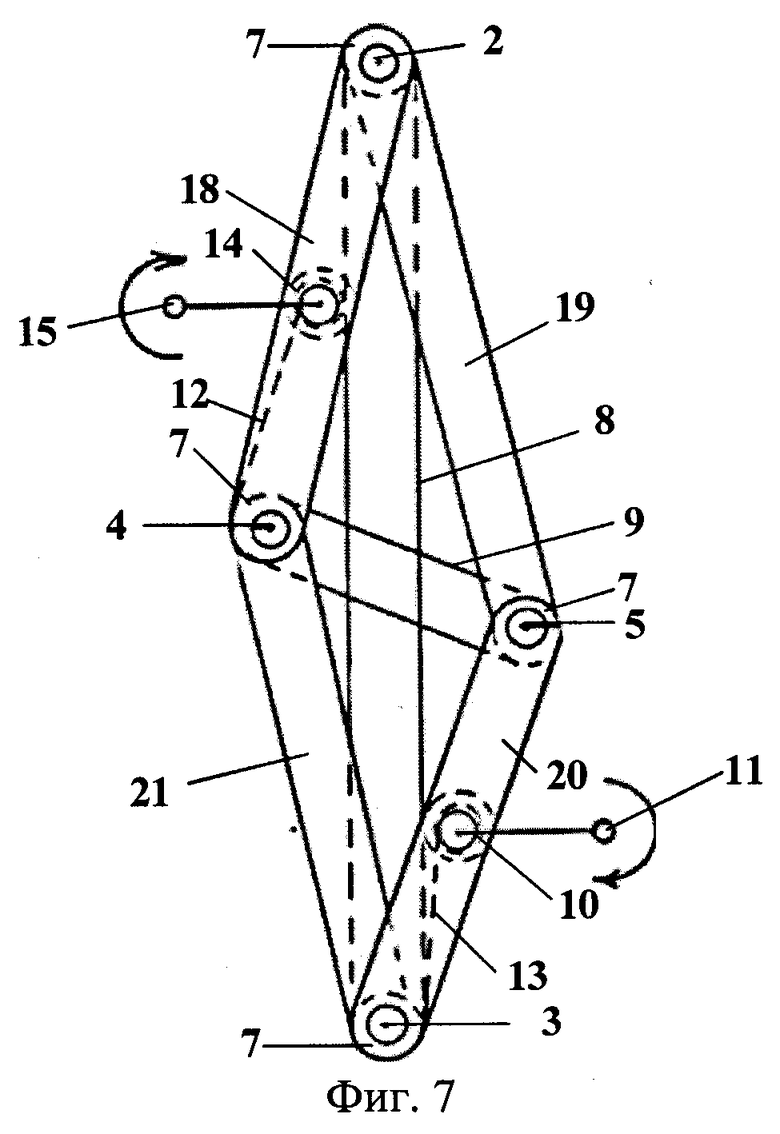
Универсальное грузоподъемное устройство, содержащее шарнирно-стержневой механизм и полиспасты, отличающееся тем, что шарнирно-стержневой механизм состоит из четырех стержней одного или разного размеров, а на осях шарниров расположены блоки, запасованные, попарно и перекрестно, несвязанными между собой полиспастами, причем на стержнях между шарнирами прикреплены механизированные или ручные лебедочные механизмы с рукоятками.
| УНИВЕРСАЛЬНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2019 |
|
RU2747751C2 |
| Грузоподъемное устройство | 1985 |
|
SU1355604A1 |
| US 2019113172 A1, 18.04.2019 | |||
| US 3034765 A, 15.05.1962. | |||

