1
Изобретение относится к подъемно транспортному машиностроению и може быть использовано в мачтах для монтжа и демонтажа оборудования преимущественно в стесненных условиях.
Цель изобретения - повышение несущей способности устройства о
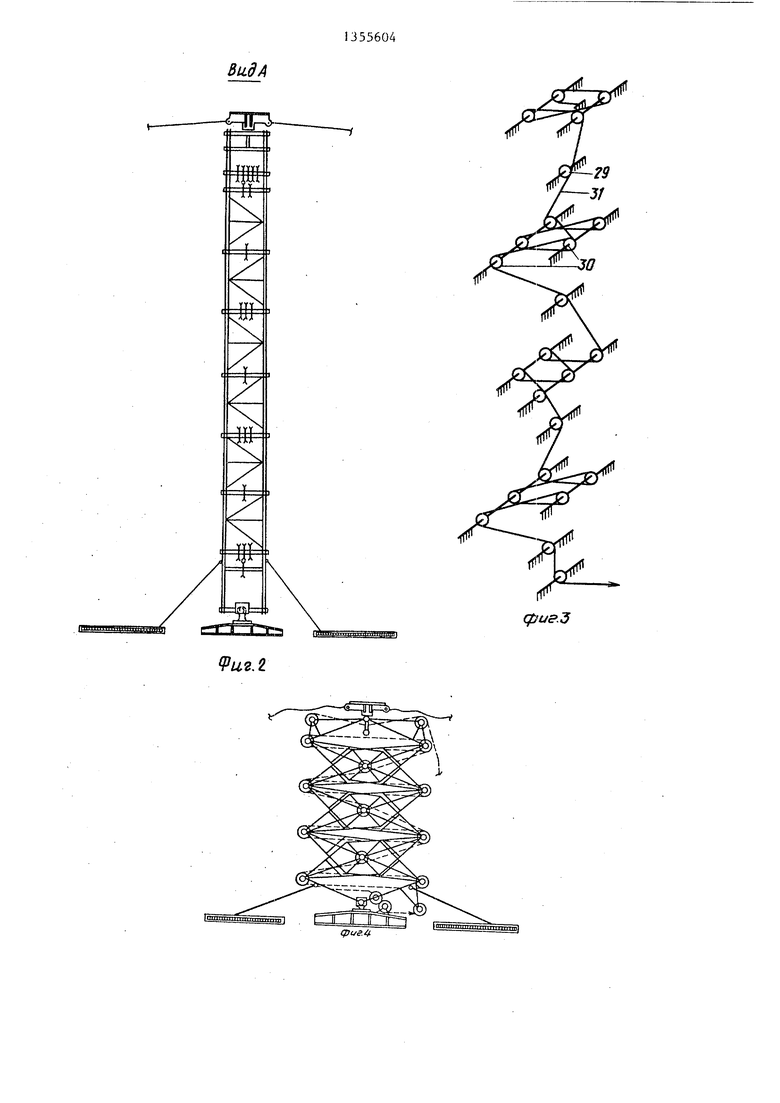
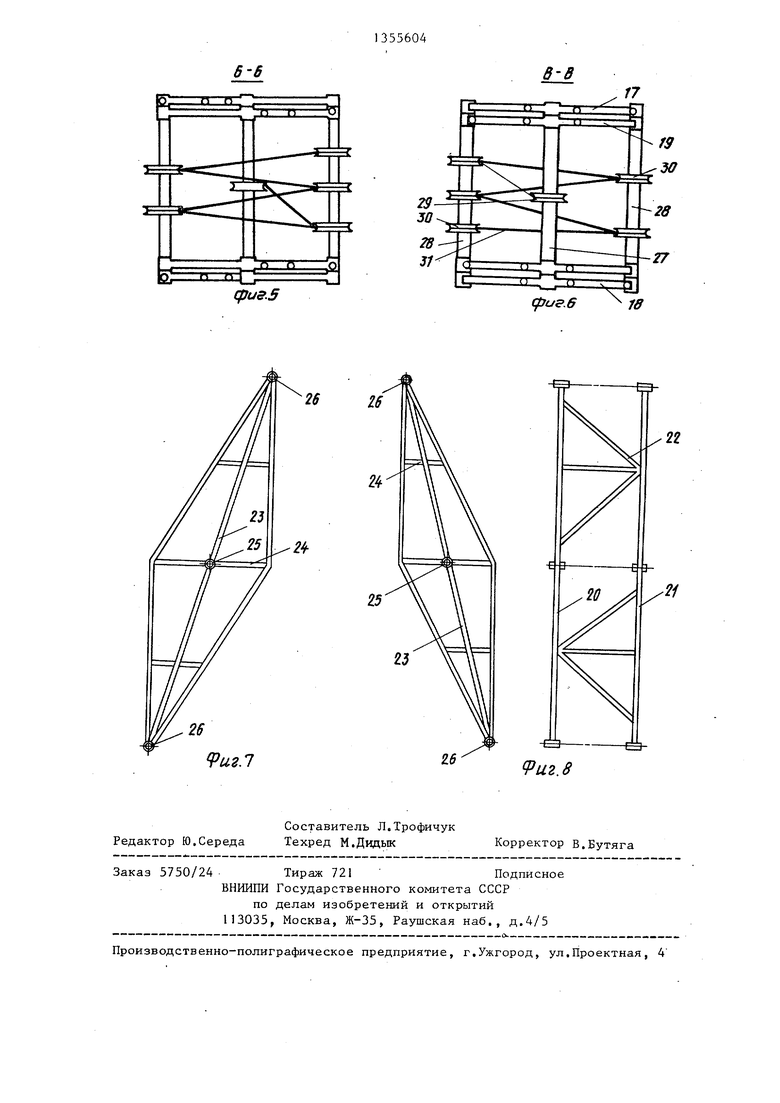
На фиг,1 схематически представлено грузоподъемное устройство в выдвинутом положении, выполненное в виде монтажной мачты; на фиг. 2 вид А на фиг.1; на фиг. 3 схема запа- совки каната канатно-блочной систе- мы; на фиг. 4 - грузоподъемное устройство в сложенном виде; на фиг.5 разрез Б-Б на фиг.1; на фиг, 6 - разрез В-В на фиг.1; на фиг, 7 - плоская ферма; на фиг. 8 - пространственная ферма.
Грузоподъемное устройство выполнено в виде монтажной мачты, содержащей основание 1, грузоудерживающе приспособление 2, шарнирно-рычажную систему 3, стабилизирующий мех&низм 4 и устройство 5 для расчаливания.
Основание 1 включает опорный башмак 6, устанавливаемый на фундамент и шаровую опору 7,, которая соединена с опорной фермой 8, Стабилизирзто щий механизм 4 выполнен в данном случае в виде стоек 9 и башмаков 10 Одни концы стоек 9 шарнирно связаны с опорной фермой 8, а другие упираюся в выступы башмаков 10. Концы стоек 9 свободно скользят по направляющим башмаков 10 при перемещении к опорному башмаку 6 и не могут перемещаться в обратную сторону.
Грузоудерживающее приспособление 2 представляет собой оголовок мачты выполненный в виде пространственной фермь; 1 1 , несущей неподвижный блок 12 и отводной блок 13 грузового полиспаста 14 о Подвижную ветвь грузового полиспаста 14 выводят на барабан грузоподъемной лебедки (не показана). На пространственной ферме 11 закреплено устройство 5 для расчали
вания, имеющее гибкие тяги 15.
Шарнирно-рычажная система 3 состоит из пространственных ферм 1 6 , шарнирно связанных между собой , Каж,п,ая пространствейная ферма 16 состоит из двух параллельно расположенных плоских ферм 17 и 18, между которыми расположена пространственная ферма 19, выполненная в виде двух плоских ферм 20 и 21, подобных 17 и 18s жестко
0
5
Ь
0
5
0
5
соединенных связями 22 (стойками и растяжками) Все плоские фермы 17 и 18, 20 и 21 выполнены одной конфигурации в виде стержневого параллелограмма с перекрещивающимися диагональными стержнями 23 и 24 и с отверстием 25,, выполненными в месте перекрещивания стерх(ней, и с отверстиями 26, выполненными в сочленениях стержней, образующих вершины параллелограмма при больших диагональных стержнях. Кроме того, плоские могут иметь дополнительные связываю- шие стержни.
Две плоские фермы 17 и 18 соединены с пространственной фермой 19 с помощью оси 27, установленной в отверстиях 25, при этом вершины параллелограммов при болышх диагональных стержнях у плоских ферм 7 и 18 направлены по одну сторону, а у пространственной фермы 19 по другую сторону от продольной оси. Таким образом плоские фермы 17 и 20, а также 18 и 21 образуют пары из двух перекрещивающихся плоскопараллельных рычагов. Пространственные формы 16 соединены между собой двумя осями 28, которые установлены в отверстиях 26 плоских ферм, так что одиночные плоские фермы 1 7 и 18 соединяются с плоскими фермами 20 и 21 сос:едней пространственной фермы 16,
На осях 27 уста1 .овлены отводные блоки 29 канатно-блочной системы а на противоположно расположенных осях 28 установлены рабочие блоки 30„ Канат 31 запасован на блоки 30 с образованием по.тель полиспаста. Подробно запасовка каната 31 на блоки показана на фиг.З. Подвижная ветвь каната 31 присоединена к тяговому механизму (не показан).
Подъем мачты в проектное положение осуществляют следуюш тсм образом,
55
Мачта в сложенном виде устанавливается на месте монтажа оборудования-, gg Опорный башмак 6 основания 1 и башмаки 0 стабилизирующего механизма. 4 крепятся к фундаменту с помощью, например 5 анкерных 5олтов. Включают тяговый механизм, При натяжении подвижной ветви канатн(з-блочной системы канат 31 начинает выбираться, сбли-. жая оси 28 между собой. После того как диагональные стержни 24 во всех плоских фермах займут горизонтальное
31
положение, а два боковых стержня - вертикальное положение, и мачта займет проектное положение, то тяговый механизм стопорится.Так как во время подъема мачта нагружена только собственным весом, то достаточно, что устойчивость обеспечивается стабилизирующим механизмом 4. После подъема мачты натягивают гибкие тяги 15,расчаливая мачту, а концы стоек 9 отсоединяют от опорной фермы 8 и устойчивость обеспечивается обычным приемом
При вьщвижении мачты канатно-блеч ная система выполняет функции части подъемного механизма. В проектном положении канатно-блочная система становится конструктивным элементом мачты, так как канат 31, запасованный на блоки 30, работает на растяжение являясь стяжкой, удерживающей оси 28 от расхождения.
Мачта в выдвинутом состоянии выполняет функции подъемного, устройства, осуществляя подъем и опускание груза с помощью грузового полиспаста 14.
Демонтаж мачты осуществляется в обратном порядке.
В статическом положении устройство представляет единую ферму, где связаны между концами стержневых параллелограммов является канат, запасованный на блоки и попарно их связывающий в полиспасты. Все полиспасты являются частью единой канатно-блочной системы, поэтому они используются не только как силовые элементы связи, но и как элементы подъемного механизма для выдвижения и опускания устройства.
Благодаря тому, что концы рычагов в нашем случае стягиваются полиспастами, снимаются изгибные напряжения в рычагах. Сами рычаги, выполненные в виде параллелограммов, представляют решетчатую конструкцию с макси
5
0
мально увеличенным поперечным сечением рычагов в местах их перекрещивания,что дает возможность увеличить несущую способность конструкции.
Формула изобретения
Грузоподъемное устройство, содержащее основание, грузоудерживающее приспособление, шарнирно-рычажный механизм, состоящий из двух перекрещивающихся плоскопараллельных рычагов, шарнирно связанных между собой в точке перекрестия, причем концы этих рычагов соединены между собой с помощью осей, канатно-блочную систему с тяговым механизмом, подвижная ветвь которой соединена с указанным тяговым механизмом и запасована на блоки с образованием петель, причем часть блоков размещена на концевых осях перекрещивающихся плоскопараллельных рычагов, отличающее- с я тем, что, с целью повышения несущей способности устройства, оно выполнено с дополнительными парами перекрещивающихся плоскопараллельных рычагов, представляющих собой фермы пространственной конструкции и образующих шарнирно-рычажную систему, при этом каждый из рычагов системы представляет собой стержневый параллелограмм с перекрещивающимися диагональными стержнями, причем все пары рычагов соединены между собой концевыми осями, соединяющими концы больших диагональных стержней и точки пересечения диагональных стержней, а часть блоков, через которые запа- сован тяговый канат с образованием петель, установлена на противоположно расположенных осях, связывающих вершины стержневого параллелограмма 5 при больших диагоналях основных и дополнительных пар упомянутых рычагов .
5
0
5
0
BiidA
ll
,
fPu2.2
фар.З
cpue.ft
6-6
8-3
gju5.5
(ftиг. 6

| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2019 |
|
RU2747751C2 |
| УНИВЕРСАЛЬНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2023 |
|
RU2811703C1 |
| Строительный подъемник | 1988 |
|
SU1588677A1 |
| КАНАТНАЯ УСТАНОВКА ДЛЯ ПОЛУПОДВЕСНОЙ БЕСЧОКЕРНОЙ | 1968 |
|
SU211561A1 |
| Кабельный кран | 1987 |
|
SU1532530A1 |
| Экскаватор - прямая механическая лопата | 1988 |
|
SU1661285A1 |
| ПОДЪЕМНИК | 2011 |
|
RU2463242C1 |
| СБОРНО-РАЗБОРНЫЙ КОНСОЛЬНЫЙ КРАН | 2021 |
|
RU2774693C1 |
| УСТРОЙСТВО ПРИНУДИТЕЛЬНОГО СЛЕЖЕНИЯ ДЛЯ МОНТАЖНЫХ ГИДРОПОДЪЕМНИКОВ | 1971 |
|
SU315688A1 |
| СКРЕПЕРНЫЙ КОВШ | 1991 |
|
RU2049867C1 |
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в мачтах для монтажа и демонтажа оборудования преимущественно в стесненных условиях. Цель изобретения - повышение несущей способности устройства.Устройство включает основание, грузоудер- живающее приспособление 2, шарнирно- рычажную систему 3, стабилизирующий механизм 4 и устройство 5 для расча- ливания. Основание 1 включает опорный башмак 6 и шаровую опору 7, которая соединена с опорной фермой 8. Стабилизирующий механизм 4 содержит стойки 9 и башмаки 10. Грузоудержи- вающее приспособление 2 -представляет собой оголовок мачты, выполненный в виде фермы 11, несущей неподвижный 12 и отводной 13. блоки грузового полиспаста 14. 8 ил. tf i (Л со сд СП О5 фиг.1
2
26
9игЛ
23
9иг.8
Редактор Ю,Середа
Составитель Л.Трофичук
Техред М.ДидыкКорректор В.Бутяга
Заказ 5750/24 Тираж 721 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Грузоподъемная платформа | 1978 |
|
SU740707A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
