Изобретение относится к машиностроению, в частности к робототехнике, а именно к манипуляционным системам и механизмам.
Механизмы параллельной кинематической структуры нашли широкое применение в различных отраслях промышленности. Большинство известных конструкций строятся на базе трипода или гексапода, обладающих высокой жесткостью. Триподы конструктивно проще гексаподов и более приспособлены к практическому применению. Они состоят из трех симметрично установленных телескопических штанг, связанных шарнирно одним концом с выходным звеном, а другим - с неподвижным основанием. Эти штанги приводятся в движение от отдельных двигателей и работают на растяжение-сжатие. Основным условием корректного функционирования механизмов параллельной кинематической структуры является согласованная работа всех его исполнительных приводов, что предполагает повышение требований к их эксплуатационной надежности. Отказ одного или нескольких приводов может стать причиной заклинивания стоек и поломки механизма, поэтому в процессе управления необходимо учитывать техническое состояние его исполнительных приводов.
Известно устройство ручного управления манипулятором-триподом (патент РФ №2501648), содержащее корпус, манипуляционную рукоятку и датчики позиционирования. Манипуляционная рукоятка установлена посредством сферического шарнира на платформе, связанной с рукоятью-подлокотником. На стержне манипуляционной рукоятки установлена скользящая втулка, на внешней поверхности которой по окружности через 120° размещены сферические шарниры, в которых крепятся штанги датчиков позиционирования, другие концы которых связаны с платформой посредством цилиндрических шарниров. Изобретение обеспечивает повышение удобства и точности ручного управления манипулятором.
Недостатком данного устройства является отсутствие возможности автоматического управления манипулятором.
Известен комплексный авиационный тренажер и способ имитации полета (Патент №2737246) реализующий способ управления параллельным манипулятором, согласно которому вычисляют оптимальные управляющие переменные платформы, используя модель процесса и принимая в расчет ограничения. Модель процесса используется для прогнозирования последствий текущих и будущих управляющих переменных и оптимизации их в соответствии с желаемой целевой функцией.
Также известен способ формирования отражающих зеркальных поверхностей антенны космического радиотелескопа (Патент №2694813), который может быть использован в качестве прототипа способа, заключающийся в измерении координат подвижной платформы, формировании задающего воздействия управляющей ЭВМ и их подачи в систему автоматического управления линейных и угловых координат.
В патенте №2694813 описана блок-схема системы автоматического управления положением подвижной платформы, которая взята за прототип устройства управления механизмами параллельной кинематической структуры, которая включает локальные системы управления и управляющую ЭВМ.
Недостатком прототипа является отсутствие контроля технического состояния исполнительных приводов, что может привести к существенному снижению точности управления.
Задачей изобретения является повышение эксплуатационной надежности механизмов параллельной кинематической структуры за счет проявляемого технического результата, заключающегося в поддержание требуемого положения звеньев механизма параллельной кинематической структуры в случае частичного отказа в системе исполнительных приводов.
Звенья механизма приводятся в движение отдельными двигателями и работают на растяжение-сжатие. Уравнение динамики платформы гексапода описывается следующей системой уравнений
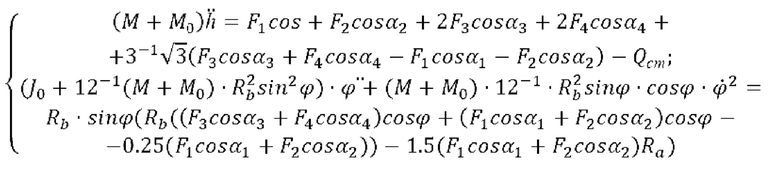
где М - масса платформы, М0 - масса установленного груза; li(li>0) - длины стоек механизма; γi(0<γi<π/2) - углы наклона кинематических цепей к основанию платформы; h - высота платформы; угол "F - угол наклона подвижной платформы к основанию; αi - углы наклона ссотвествующих кинематических цепей к вертикали; Fi=Fi(li) - управляющие силы, направленные вдоль соответствующих кинематических цепей.
Данные уравнения показывают взаимосвязь управляющих сил Fi и обобщенных координат платформы h и ϕ.
Для реализации программного движения платформы необходимо задавать требуемые силы (Fi) для каждого исполнительного привода, которые являются суммой статической (Fст) и дополнительной управляющей (ΔFi) сил.
Статическая сила определяется внешней нагрузкой на платформу и рассчитывается в зависимости от кинематической схемы механизма параллельной кинематической структуры. Для перемещения платформы необходимо к каждой стойке механизма приложить дополнительные управляющие силы (ΔFi), изменение которых полностью зависит от заданного закона движения всей платформы.
Для обеспечения надежного функционирования механизма необходимо выполнение условия статической устойчивости, проверяемое при его проектировании: Fi≤Fкр, где Fкр - значение критической силы по Эйлеру, зависящая от способа выполнения стойки. Например, для винтовой передачи

где Е - модуль упругости материала; S - коэффициент запаса; l - длина нагруженного участка винта; dв - внутренний диаметр винт; μ - коэффициент жесткости винтовой передачи.
Управление платформой реализуется с помощью отрицательной обратной связи через увеличение силы Fi, развиваемой каждым приводом uk=ƒ(Fi). В случае частичного отказа, неисправные приводы не могут перемещать внешнюю нагрузку, а, следовательно, возникает проблема ее перераспределения на соседние рабочие приводы для продолжения эксплуатации платформы согласно заданному закону управления.
Таким образом, принципы выбора режима эксплуатации механизма параллельной кинематической структуры при частичном отказе систем приводом следующие:
- определяются текущее и прогнозное техническое состояние каждого исполнительного привода механизма;
- определяется текущая нагрузку на каждый исправный привод механизма LПРi;
- определяются количество и взаимное расположение неисправных приводов механизма друг относительно друга;
- определяется дополнительная нагрузка ΔLПРi на каждый из исправных приводов и принимается решение о возможности и целесообразности перераспределения нагрузки на соседние исправные приводы;
- в случае принятия положительного решения для каждого исправного привода находится интегральный коэффициент Ki, учитывающий техническое состояние, текущую и дополнительную нагрузку на исправный привод. Умножение Ki на соответствующую статическую силу Fстi позволит скорректировать режим работы механизма, обеспечив выполнение заданного закона управления при частичном отказе системы приводов:

Вводимый интегральный коэффициент Ki=1, если все приводы исправны и система работает в заданном программном режиме. Если часть приводов механизма неисправна и коррекция целесообразна, то для каждого исправного привода рассчитывается свой Ki в зависимости от его технического состояния, текущей нагрузки и положения относительно неисправных приводов при выполнении условия работоспособности.
При отрицательном решении необходимо отключить механизм.
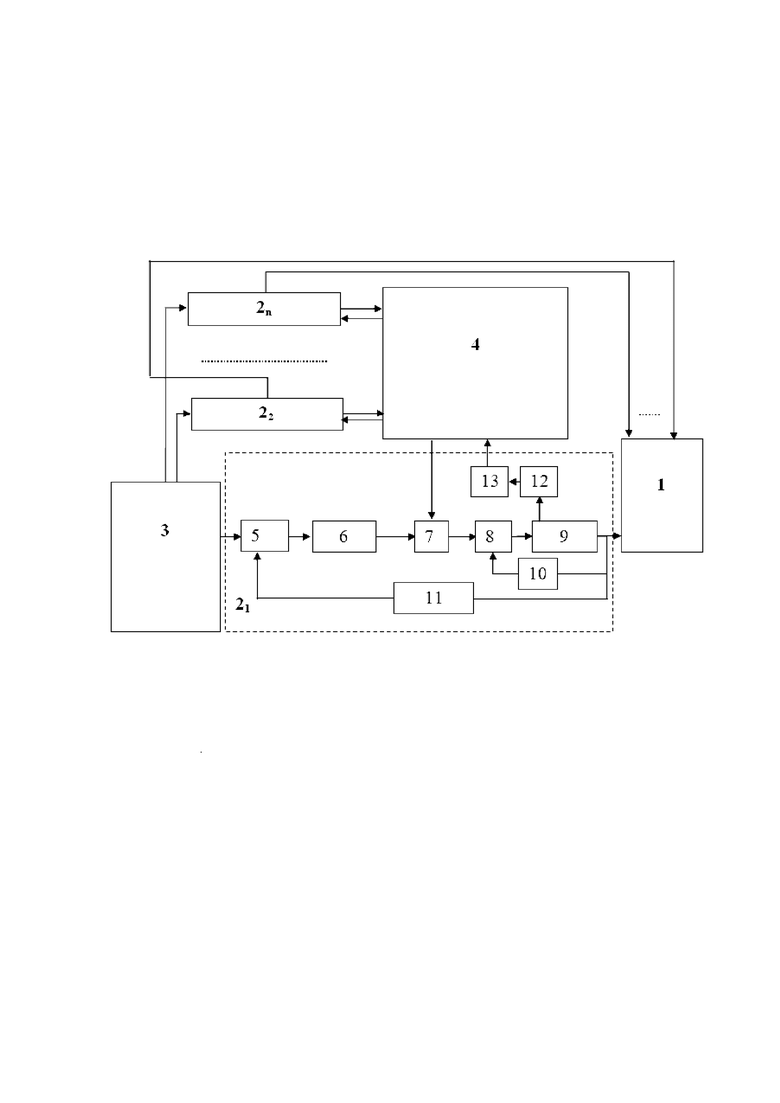
На Фиг. 1 представлена функциональная схема устройства управления механизмом параллельной кинематической структуры с учетом технического состояния его исполнительных приводов (Фиг) которое содержит:
1 - подвижная платформа механизма параллельной кинематической структуры;
21…2n- три и более локальных системы управления механизмом параллельной кинематической структуры;
3 - управляющая ЭВМ;
4 - блок принятия решения;
5- первый сумматор;
6 - регулятор положения стойки механизма;
7 - умножитель;
8 - второй сумматор;
9 - привод стойки механизма параллельной кинематической структуры;
10 - датчик скорости;
11 - датчик положения
12 - блок вычислений;
13 - блок определения технического состояния;
Устройство состоит из объекта управления - подвижной платформы механизма параллельной кинематической структуры 1, трех и более идентичных локальных систем управления стойками механизма 21…2n, управляющей ЭВМ 3 и блока принятия решения 4.
Система включает три и более идентичных локальных систем управления стойками механизма 21…2n, каждая их которых включает: первый сумматор 5, регулятор положения стойки механизма 6, умножитель 7, второй сумматор 8, привод стойки механизма параллельной кинематической структуры 9 и датчик скорости 10 и датчик положения 11.
Система управления устроена следующим образом: с входа управляющей ЭВМ 3 на первый вход блока локальных системы управления стойками 2i подается управляющий сигнал UZi, i ∈ [1,n] на первый вход первого сумматора 5, выход которого соединен с входом регулятора положения 6, выход которого соединен с первым входом умножителя 7, выход которого соединен с первым входом второго сумматора 8, выход которого соединен с входом блока привода стойки манипулятора 9, выход которого соединен с входом платформы 1, входом датчика скорости 10, выход которого соединен со вторым входом второго сумматора 8, и входом датчика положения 11, выход которого соединен со вторым входом первого сумматора 5, а второй выход блока привода 9 соединен с входом блока вычисления 12, выход которого соединен с входом блока оценки технического состояния 13, выход которого соединен с соответствующим входом блока принятия решения 4, выход которого соединен со вторым входом умножителя 7.
Выполнение способа рассмотрено на примере работы устройства. Управление каждым приводом механизма параллельной кинематической структуры выполняется раздельно и строится по принципу отрицательной обратной связи по положению звена. Сформированный управляющей ЭВМ 3 управляющий сигнал UZi, i∈[1,n], пропорциональный управляющей силе Fi поступает на регулятор положения 6, который осуществляет перемещение звена на требуемую величину с заданной скоростью.
С каждого привода системы 9 снимаются текущие значения диагностических параметров ai, которые подаются в блок оценки технического состояния 12, где происходит определение технического состояния привода механизма, поиск возникших неисправностей и расчет текущей нагрузки на привод LПРi. Из базы данных (на рисунке не показана) извлекается значения амплитуд токовых сигналов на характерных частотах Фурье-спектра для заведомо исправного не нагруженного привода, работающего в основном эксплуатационном режиме а0i, с которыми сравнивают текущие амплитуды сигнала ai. Значения максимально допустимых коэффициентов амах, рассчитывают по перегрузочной способности двигателя по току KT:aмахi=a0i ⋅ KT. Тогда текущую нагрузку на привод вычисляют следующим образом
Результаты расчета анализируют следующим образом. Если ai=a0i LПРi=0 - привод работает в номинальном режиме. Если ai=aмахi то LПРi=1, - предельная нагрузка на привод. Допустимым режимом эксплуатации привода с возможностью коррекции нагрузки является диапазон нагрузок 0≤LПРi<1.
Если привод работоспособен, то результаты диагностирования сохраняются в числовом формате в базу данных с привязкой к реальному масштабу времени, а также передаются на вход нейронной сети, в которой определяется период сохранения работоспособности приводом механизма параллельной кинематической структуры. Информация о текущем и прогнозном состоянии, а также текущей нагрузки на приводы механизма подаются в блок принятия решения 14, где рассчитывается дополнительная нагрузка  (n - проектное количество приводов, n* - количество исправных приводов) на каждый из исправных приводов и принимается решение о целесообразности перераспределения нагрузки. В случае принятия положительного решения, для каждого исправного привода определяется интегральный коэффициент Ki=1+ΔLПРi, который подается на вход умножителя 7 и происходит умножение Ki на управляющее напряжение UΔFi, выходящее с регулятора положения 6. Такая коррекция позволит обеспечить поддержание требуемого положения звеньев механизма параллельной кинематической структуры в случае частичного отказа в системе исполнительных приводов.
(n - проектное количество приводов, n* - количество исправных приводов) на каждый из исправных приводов и принимается решение о целесообразности перераспределения нагрузки. В случае принятия положительного решения, для каждого исправного привода определяется интегральный коэффициент Ki=1+ΔLПРi, который подается на вход умножителя 7 и происходит умножение Ki на управляющее напряжение UΔFi, выходящее с регулятора положения 6. Такая коррекция позволит обеспечить поддержание требуемого положения звеньев механизма параллельной кинематической структуры в случае частичного отказа в системе исполнительных приводов.
Для реализации указанного способа управления необходимо при проектировании механизма параллельной кинематической структуры закладывать запас по мощности приводов. Нагрузка на приводы механизма с параллельными кинематическими цепями выбирается в диапазоне 30-60% от максимальной допустимой, а для механизма с двумя сходящимися в одной точке кинематическими цепями - не более 50% от максимальной.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2104883C1 |
| Устройство автоматического обнаружения неисправностей приводного регулирующего органа транспортного трубопровода | 1980 |
|
SU922002A1 |
| Устройство для регулирования расхода жидкости | 1984 |
|
SU1236434A2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Устройство управления телевизионной системой манипуляционного робота | 1988 |
|
SU1732495A1 |
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| Устройство для управления координатным транспортным средством | 1990 |
|
SU1718234A1 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2001 |
|
RU2191430C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099206C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
Группа изобретений относится к области робототехники и может быть использована в манипуляционных системах в виде механизмов параллельной кинематической структуры. Предлагаемые способ и устройство управления основаны на использовании блока оценки технического состояния приводов механизма, позволяющего определить техническое состояние и текущую нагрузку на каждый привод, а также количество и расположение неисправных приводов. Соответствующим образом рассчитывают дополнительную нагрузку на каждый исправный привод, на основании чего корректируют управляющие воздействия, подаваемые на исправные приводы с обеспечением выполнения заданного закона движения механизма. Использование изобретений позволяет повысить эксплуатационную надежность механизма за счет поддержания требуемого положения звеньев механизма и выполнения заданного закона движения в случае частичного отказа в системе исполнительных приводов. 2 н.п. ф-лы, 1 ил.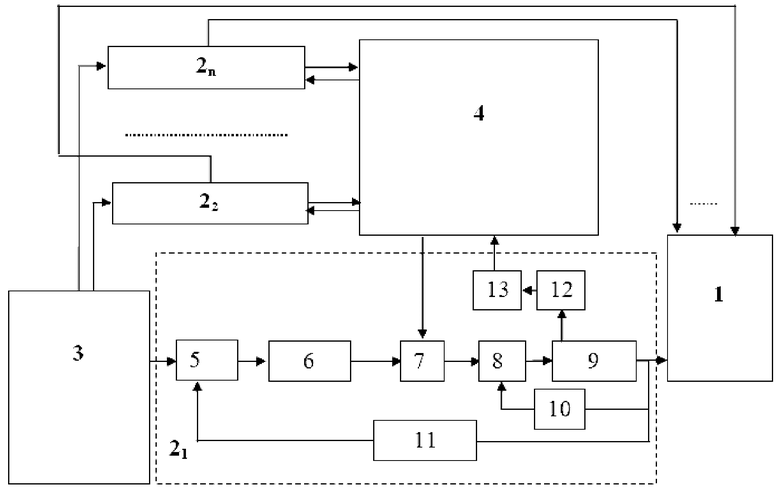
1. Способ управления положением механизма параллельной кинематической структуры с учетом технического состояния исполнительных приводов выдвижения стоек платформы, включающий формирование задающих воздействий для совокупности упомянутых приводов стоек и автоматическое регулирование координат каждого упомянутого привода, отличающийся тем, что в процессе работы упомянутого механизма определяют текущее техническое состояние и текущую нагрузку на каждый упомянутый привод с выявлением количества и расположения неисправных приводов, при этом соответствующим образом рассчитывают дополнительную нагрузку на каждый исправный упомянутый привод, расположенный смежно с выявленным неисправным, а на основании этого расчета осуществляют корректировку задающего воздействия для каждого исправного упомянутого привода.
2. Устройство для управления положением механизма параллельной кинематической структуры с учетом технического состояния исполнительных приводов выдвижения стоек платформы, содержащее управляющую ЭВМ и по количеству упомянутых стоек идентичные блоки локальных систем управления выдвижением стоек платформы, причем каждый из упомянутых блоков включает в себя последовательно соединенные первый сумматор и регулятор положения, второй сумматор и упомянутый привод, датчик положения привода, выход которого связан со вторым входом первого сумматора, и датчик скорости привода, выход которого соединен со вторым входом второго сумматора, при этом выход управляющей ЭВМ связан с входом первого сумматора каждого из упомянутых блоков локальных систем управления, отличающееся тем, что оно снабжено блоком принятия решения, а каждый из упомянутых блоков локальных систем управления снабжен умножителем и последовательно соединенными блоком вычислений и блоком оценки технического состояния, при этом вход блока вычислений связан с выходом упомянутого привода с возможностью получения значений диагностических параметров, выход блока оценки технического состояния соединен с соответствующим входом блока принятия решения, соответствующий выход которого связан со вторым входом умножителя, причем первый вход умножителя соединен с выходом регулятора положения, а выход умножителя связан с первым входом второго сумматора.
| СПОСОБ ФОРМИРОВАНИЯ ОТРАЖАЮЩИХ ЗЕРКАЛЬНЫХ ПОВЕРХНОСТЕЙ АНТЕННЫ КОСМИЧЕСКОГО РАДИОТЕЛЕСКОПА | 2018 |
|
RU2694813C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ-ТРИПОДОМ | 2011 |
|
RU2501648C2 |
| КОМПЛЕКСНЫЙ АВИАЦИОННЫЙ ТРЕНАЖЕР И СПОСОБ ИМИТАЦИИ ПОЛЕТА | 2016 |
|
RU2737246C2 |
| Грохот для содержащих засоряющие примеси материалов | 1960 |
|
SU139162A1 |
| CN 108000483 A, 08.05.2018 | |||
| CN 111086024 A, 01.05.2020 | |||
| US 2019099886 A1, 04.04.2019. | |||
