Изобретение относится к области навигации и предназначено для определения координат, скорости и ориентации объектов.
Изобретение может использоваться при осуществлении навигации наземных и водных объектов, летательных аппаратов (ЛА), включая навигацию с точностью, необходимой для посадки как пилотируемых, так и беспилотных ЛА в автоматическом режиме на взлетно-посадочные полосы, платформы морского базирования, посадочные площадки, в том числе на необорудованные автоматизированными системами и светосигнальным оборудованием взлетно-посадочные полосы в условиях ограниченной видимости. Изобретение объединяет инерциальный способ навигации и радиотехнический дальномерный способ навигации.
Известны способы навигации, основанные на применении глобальных навигационных спутниковых систем (ГНСС), например, [1, 2]. Также известны способы навигации, основанные на применении в качестве опорных навигационных устройств (ОНУ) наземных радиомаяков (НРМ) [1, 3, 4, 5]. Каждый из способов имеет достоинства и недостатки. В целом, основными недостатками способов навигации по ГНСС являются низкая помехоустойчивость, неспособность работать в верхних арктических широтах, а также то, что необходимым условием обеспечения высокой точности является использование дорогостоящей наземной локальной контрольно-корректирующей станции (ЛККС). Кроме того, передача дифференциальных поправок на объект навигации подразумевает наличие радиоканала между объектом навигации и ЛККС, что затруднено, например, в городских условиях.
Одним из аналогов заявляемого способа является комплексный способ по патенту [5], в котором совместно используются три способа навигации: инерциальный, спутниковый и радиотехнический дальномерный. Наиболее существенными недостатками данного способа являются низкая точность измерения дальности системой DME и низкая точность измерения координат ГНСС, что связано с использованием стандартного (недифференциального) спутникового способа навигации, в котором не требуется наземная ЛККС. В сумме это не позволяет получить точность определения координат, требуемую для посадки ЛА.
Способ [3] требует синхронизации наземного оборудования, что с учетом требуемого в изобретении количества НРМ, более 4, приводит к существенному удорожанию оборудования. Кроме того, для увеличения точности радиодальномерных систем, как правило, требуется установка НРМ на значительном расстоянии друг от друга, в том числе в отсутствие взаимной радиовидимости, что затрудняет их синхронизацию.
Наиболее близким техническим решением, принятым в качестве прототипа, является способ [1]. В прототипе предлагается способ навигации для ЛА. В способе предлагается сочетание радиотехнической дальномерной системы и ГНСС, причем в качестве ЛККС для ГНСС предлагается использование одного из НРМ, оснащенных приемниками ГНСС, постоянно уточняющих координаты своего местоположения. Данный способ не предполагает автономного использования радиотехнической дальномерной системы, что не позволяет говорить о локальной автономности системы. Кроме того, усложнение аппаратуры, расширение функционала в отсутствие возможности работы без ГНСС, приводит к увеличению стоимости при наличии существующего решения в виде ГНСС в дифференциальном режиме. Способ предполагает ограниченное использование объектов навигации, а именно имеет направленность исключительно на ЛА. Использование в качестве НРМ радиомаяков DME или радиотехнической системы ближней навигации (РСБН) требует в зоне навигации большого ресурса радиочастотного диапазона, так как каждый НРМ работает на собственной радиочастоте. Кроме того, последовательное формирование запросных сигналов для каждого из НРМ увеличивает время обновления навигационной информации, что может ухудшить характеристики системы. Данный способ был взят, как прототип, поскольку в нем наиболее полно описан алгоритм расчета навигационных параметров с помощью радиотехнической дальномерной системы.
Задачей заявленного изобретения является повышение надежности и точности комплексного способа навигации при автономном использовании радиотехнической дальномерной системы с одновременным уменьшением количества занимаемых ею радиочастот. Задача решается следующим образом.
Предлагается комплексный способ навигации наземных, водных, летательных, как пилотируемых, так и беспилотных объектов, предусматривающий для определения местоположения использование совокупности инерциального и радиотехнического дальномерного способов навигации.
Радиотехнический дальномерный способ навигации основан на определении дальностей от запросчика до не менее 2-х опорных навигационных устройств (ОНУ), этот способ включает в себя излучение по дальномерному каналу запросных дальномерных сигналов запросчиком, прием упомянутых сигналов на ОНУ, базовые координаты которых известны, формирование и излучение по дальномерному каналу ответных дальномерных сигналов, прием на запросчике упомянутых ответных сигналов, измерение на запросчике времени задержки ответных дальномерных сигналов относительно запросных дальномерных сигналов и определение навигационных параметров по радиотехническому дальномерному способу, а далее предусматривающий в бортовом вычислителе комплексную обработку навигационных параметров (дальномерных и инерциальных).
Для уменьшения полосы занимаемых радиочастот предусмотрена работа запросчика и всех ОНУ на одной радиочастоте. При этом используется один общий запросный сигнал для всех ОНУ. Для ответа каждому ОНУ отведен свой временной интервал (таймслот) относительно запросного сигнала. После приема запросного сигнала каждый ОНУ задерживает ответный сигнал на свой заранее известный интервал времени, достаточный для попадания в отведенный таймслот. При этом величины таймслотов выбираются исходя из максимальных дальностей и взаимного расположения ОНУ. При измерении дальности в запросчике в зависимости от того, в каком таймслоте был принят ответный сигнал, компенсируется конкретная задержка данного ОНУ.
Для повышения точности измерения дальностей в условиях движения и маневрирования объекта и наличия переотражений от местных предметов в окрестности ОНУ предлагается специальный формат излучаемых запросных и ответных сигналов. Сигналы представляют собой следующую последовательность импульсов. Сначала излучается несколько импульсов синхронизации (импульсы «старта»), затем последовательность из нескольких импульсов, по которым производится быстрая регулировка усиления приемного устройства (импульсы АРУ) и в конце один или несколько импульсов, по которым производится точная привязка к моменту прихода запросных или ответных сигналов (измерительные импульсы). На ОНУ момент излучения ответных дальномерных сигналов точно привязан к моменту прихода запросных измерительных импульсов. На запросчике измерение задержки прихода ответных дальномерных сигналов производится по измерительным импульсам. Использование минимальной задержки времени между регулировкой усиления приемного устройства и моментом времени прихода измерительных импульсов позволяет стабилизировать амплитуду последних при быстрых изменениях условий распространения радиосигналов. В свою очередь стабилизация амплитуды позволяет осуществлять привязку всегда к одному и тому же месту на переднем фронте импульса, что значительно повышает точность измерений.
Дальность между объектом навигации и ОНУ вычисляется в запросчике согласно формуле:

где св - скорость распространения радиоволны при текущих параметрах атмосферы,
tотв - метка времени получения ответного сигнала на запросчике,
tзапр - метка времени излучения запросного сигнала запросчике,
ti - программируемое время задержки ответа i-го ОНУ.
Благодаря учету задержек в ответчиках при измерении дальностей до нескольких ОНУ не происходит снижения точности измерений.
Далее измерения дальностей поступают в блок фильтрации и прогнозирования вычислителя. В данном блоке каждое измерение анализируется отдельным наблюдателем каламановского типа независимо от остальных. Для этого вводится и оценивается следующий вектор состояния:
где d - дальность, выработанная в текущем измерительном канале;
 - производная дальности по времени.
- производная дальности по времени.
Для описания процесса используется система уравнений:
где  и
и  - шум, описывающий ошибки измерений и учитывающий неточность модели; dt - период дискретизации.
- шум, описывающий ошибки измерений и учитывающий неточность модели; dt - период дискретизации.
Связь вектора состояния с измерениями в общем случае описывается как:

где Z - вектор измерений; z1 - измерение дальности, выработанное в текущем канале на текущем шаге работы; vk - измерительный шум.
Непосредственно фильтрация выполняется на основе матричных уравнений следующего вида:


где  - дискретная матрица модели,
- дискретная матрица модели,
 - матрица влияния входных шумов,
- матрица влияния входных шумов,
 - матрица наблюдения.
- матрица наблюдения.
Оценка значения вектора X на текущем шаге работы вычисляется по следующему алгоритму:
1. вычисляется априорная оценка:

2. вычисляется ковариационная матрица априорной оценки:

3. вычисляется невязка измерений и априорной оценки:

4. вычисляется ковариационная матрица невязки:

5. вычисляется калмановский коэффициент:

6. вычисляется значение вектора X:

7. вычисляется ковариационная матрица оценки вектора X:

Элемент х1 вектора X используется как значение дальности при дальнейшем расчете координат, а величина 1/Р11 - статистическая мера достоверности этой дальности, где Р11 - элемент матрицы 
Алгоритм определения местоположения по дальностям до ОНУ с известными координатами основан на методе мультилатерации и описан в литературе [6, 7]. Определение местоположения по совокупности измерений дальностей является нелинейной задачей оценивания, для решения которой используется итерационный метод наименьших квадратов, а минимизируемый критерий, соответствующий линеаризованному описанию функции

в окрестности точки линеаризации имеет вид:

где (ХЛ, YЛ, ZЛ) - координаты точки линеаризации;
Δi=di-Di - невязки вычисления дальностей до i-го ОНУ,
di - измеренное значение дальности до i-го ОНУ;
 - строка матрицы наблюдения для i-го ОНУ.
- строка матрицы наблюдения для i-го ОНУ.
Известно, что точность определения координат радиотехническим дальномерным способом (σМ) зависит от ошибок топогеодезической привязки ОНУ (σОНУ), ошибок измерения дальностей от объекта навигации до каждого ОНУ (σD), конфигурации ОНУ и от взаимного расположения объекта навигации и группировки ОНУ:
где PDOP - геометрический фактор ухудшения точности - параметр, характеризующий влияние конфигурации ОНУ и взаимного расположения объекта навигации и группировки ОНУ на конечную ошибку определения координат объекта.
Величина геометрического фактора ухудшения точности вычисляется как квадратный корень от следа информационной матрицы Фишера Q:

Как известно, точность и наличие радиоизмерений зависят, в том числе, от наличия прямой радиовидимости АФУ объекта навигации и ОНУ. Таким образом, в ситуациях пограничной радиовидимости конфигурация ОНУ меняется, что приводит к существенным скачкам геометрического фактора ухудшения точности. Предлагаемый способ навигации с использованием предварительной фильтрации и прогнозирования позволяет избежать выбросов и уменьшить шумовые составляющие ошибок.
Алгоритм бесплатформенной инерциальной навигационной системы (БИНС) построен на кватернионах с использованием замкнутого метода выставки [8].
В ходе комплексной обработки информации, полученной от радиотехнической дальномерной системы и БИНС, производится непрерывная оценка ошибок измерений всех используемых датчиков и коррекция координат местоположения, линейных скоростей, углов ориентации объекта.
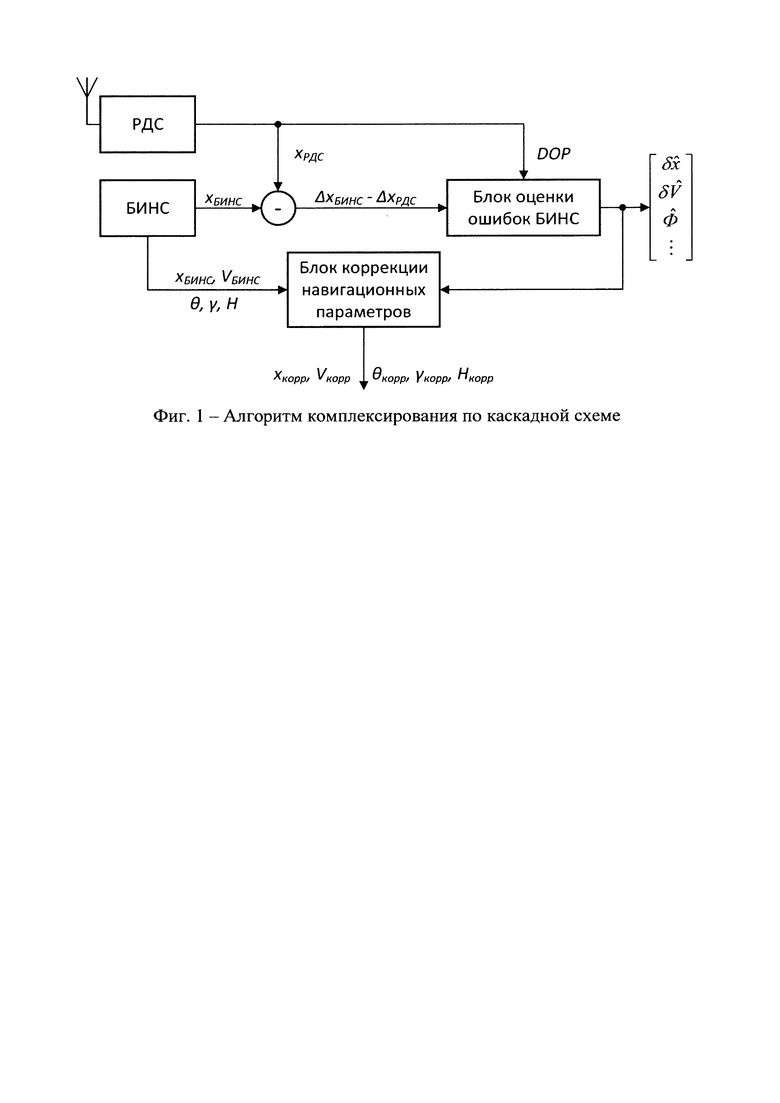
Алгоритм комплексирования реализован по каскадной схеме и представлен на фиг. 1.
Согласно представленному алгоритму разность выходных данных двух систем, а именно координат, вычисленных с помощью радиотехнической дальномерной системы и БИНС, поступают в блок оценки ошибок БИНС. Используя модель ошибок БИНС (1), как модель системы и разность ошибок координат (2), как модель измерений блок оценки предоставляет оценки всех наблюдаемых ошибок БИНС. Оценки ошибок БИНС далее применяются для коррекции данных БИНС. В случае, когда измерения радиотехнической дальномерной системы недоступны, БИНС работает в режиме прогноза.
где δE, δN - ошибки по координатам, δVE, δVN - ошибки по скоростям, g - ускорение силы тяжести, ФЕ, ФN - ошибки по углам ориентации, R - радиус Земли,  - дрейф датчиков угловых скоростей, причем
- дрейф датчиков угловых скоростей, причем  где
где  - матрица перехода из связанной в навигационную (географическую) систему координат, XYZ - связанная с объектом система координат; параметры формирующего фильтра: β1, β2 - параметры затухания корреляционных функций,
- матрица перехода из связанной в навигационную (географическую) систему координат, XYZ - связанная с объектом система координат; параметры формирующего фильтра: β1, β2 - параметры затухания корреляционных функций,  - дисперсия шума гироскопов, w(t) - «белый» шум единичной интенсивности.
- дисперсия шума гироскопов, w(t) - «белый» шум единичной интенсивности.

где  - ошибки БИНС по координатам,
- ошибки БИНС по координатам,  - ошибки радиотехнической дальномерной системы по координатам.
- ошибки радиотехнической дальномерной системы по координатам.
Особенностью реализованного алгоритма является способ формирования ковариационной матрицы измерительных шумов в фильтре Калмана. Согласно приведенным ранее зависимостям точность определения координат радиотехнической дальномерной системой оценивается произведением СКО измерений дальностей до ОНУ на геометрический фактор, поэтому при определении ковариационной матрицы измерительных шумов в алгоритме комплексирования использовалась именно эта оценка погрешности измерений. Таким образом реализовано адаптивное изменение параметров комплексирования.
Техническим результатом заявляемого изобретения является обеспечение навигации объекта с высокой точностью, отсутствие требования синхронизации шкал времени ОНУ между собой и ОНУ с объектом навигации, благодаря чему реализация способа проще и дешевле известных аналогов.
Способ может найти применение для построения навигационной системы в составе системы посадки пилотируемого или беспилотного ЛА, для навигации судов в зонах стесненных вод, а именно в каналах, шлюзовых камерах, а также для навигации наземного транспорта, в том числе в условиях городской застройки.
Литература
1. Патент RU 2410518 «Комплексный способ навигации летательных аппаратов», ЗАО «ВНИИРА-Навигатор», 17.08.2012.
2. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. - 4-е изд., перераб. и доп. - М.: Радиотехника. - 800 с.
3. Патент RU 2558412 «Многопозиционная система посадки воздушных судов», ООО "Фирма "Нита", 05.06.2014.
4. Патент RU 2264598 «Способ определения координат летательного аппарата», ОАО МНПК «Авионика», 17.12.2004.
5. Патент US 20100106416, «Aircraft navigation using the global positioning system, inertial reference system, and distance measurements», 28.10.2008.
6. Степанов O.A. Основы теории оценивания с приложениями к задачам обработки навигационной информации. Ч. 1. Введение в теорию оценивания. СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2010. 509 с.
7. Программная реализация алгоритма функционирования автономной системы ближней радионавигации для автоматизированной системы посадки / С.В. Смирнов, А.В. Измайлов-Перкин // Известия Тульского государственного университета. Технические науки. Тула: Изд-во ТулГУ, 2016, Вып. 6, С. 45-55.
8. Salychev O.S. Applied Inertial Navigation: Problems and Solutions. BMSTU Press, 2004. - 303 p.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2015 |
|
RU2606241C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| СПОСОБ КООРДИНАТНО-ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОДВОДНЫХ МОБИЛЬНЫХ ОБЪЕКТОВ | 2007 |
|
RU2390098C2 |
| Способ навигации с использованием радионавигационных опорных станций и опорная станция для его осуществления | 2023 |
|
RU2837598C1 |
Изобретение относится к области навигации и предназначено для определения координат, скорости и ориентации объектов и может использоваться при осуществлении навигации наземных и водных объектов, летательных аппаратов (ЛА). Комплексный способ навигации объекта, в том числе наземного, водного, летательного, как пилотируемого, так и беспилотного, предусматривает для определения местоположения объекта применение инерциального способа навигации, использующего данные об ускорениях и угловых скоростях объекта в осях связанной с объектом системы координат, и одновременно с упомянутым способом использование радиотехнического дальномерного способа навигации на основе определения дальностей от запросчика до не менее 2-х опорных навигационных устройств (ОНУ), который включает излучение по дальномерному каналу запросных дальномерных сигналов запросчиком, прием упомянутых сигналов на ОНУ, базовые координаты которых известны, формирование и излучение по дальномерному каналу ответных дальномерных сигналов, прием на запросчике объекта упомянутых ответных сигналов, измерение на запросчике времени задержки ответных дальномерных сигналов относительно запросных дальномерных сигналов и определение навигационных параметров по радиотехническому дальномерному способу, а далее предусматривающий в бортовом вычислителе комплексную обработку навигационных параметров. При этом в запросные и в ответные сигналы вводится дополнительная последовательность импульсов, позволяющая быстро отрегулировать усиление приемного устройства для стабилизации амплитуды измерительных импульсов, чем достигается точная привязка к передним фронтам последних, использующаяся для синхронизации момента излучения ответного сигнала ОНУ или для измерения задержки прихода ответных дальномерных сигналов в запросчике, причем предусмотрена работа запросчика и всех ОНУ на одной радиочастоте и использование одного общего запросного сигнала для всех ОНУ, а также выделение для ответа каждому ОНУ своего временного интервала (таймслота) относительно запросного сигнала так, чтобы после приема запросного сигнала в каждом ОНУ обеспечивалась известная фиксированная задержка излучения ответного сигнала, достаточная для попадания последнего в отведенный для него таймслот. Технический результат – повышение надежности и точности комплексного способа навигации при автономном использовании радиотехнической дальномерной системы с одновременным уменьшением количества занимаемых ею радиочастот. 1 ил.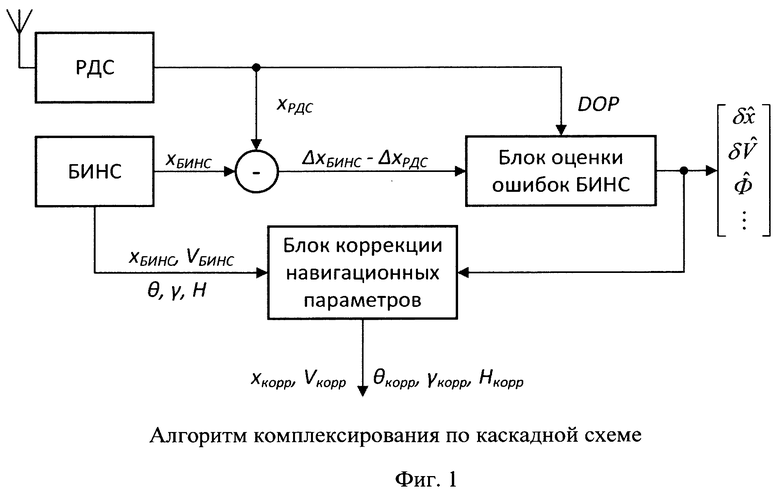
Комплексный способ навигации объекта, в том числе наземного, водного, летательного, как пилотируемого, так и беспилотного, предусматривающий для определения местоположения объекта применение инерциального способа навигации, использующего данные об ускорениях и угловых скоростях объекта в осях связанной с объектом системы координат, и одновременно с упомянутым способом использование радиотехнического дальномерного способа навигации на основе определения дальностей от запросчика до не менее 2-х опорных навигационных устройств (ОНУ), который включает излучение по дальномерному каналу запросных дальномерных сигналов запросчиком, прием упомянутых сигналов на ОНУ, базовые координаты которых известны, формирование и излучение по дальномерному каналу ответных дальномерных сигналов, прием на запросчике объекта упомянутых ответных сигналов, измерение на запросчике времени задержки ответных дальномерных сигналов относительно запросных дальномерных сигналов и определение навигационных параметров по радиотехническому дальномерному способу, а далее предусматривающий в бортовом вычислителе комплексную обработку навигационных параметров - дальномерных и инерциальных, отличающийся тем, что в запросные и в ответные сигналы вводится дополнительная последовательность импульсов, позволяющая быстро отрегулировать усиление приемного устройства для стабилизации амплитуды измерительных импульсов, чем достигается точная привязка к передним фронтам последних, использующаяся для синхронизации момента излучения ответного сигнала ОНУ или для измерения задержки прихода ответных дальномерных сигналов в запросчике, причем предусмотрена работа запросчика и всех ОНУ на одной радиочастоте и использование одного общего запросного сигнала для всех ОНУ, а также выделение для ответа каждому ОНУ своего временного интервала (таймслота) относительно запросного сигнала так, чтобы после приема запросного сигнала в каждом ОНУ обеспечивалась известная фиксированная задержка излучения ответного сигнала, достаточная для попадания последнего в отведенный для него таймслот.
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| RU 2018111105 A, 01.10.2019 | |||
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| US 10082583 B2, 25.09.2018. | |||

