Изобретение относится к области статической или динамической балансировки машин и конструкций, в частности может быть использовано для определения моментов инерции и положения центра масс объектов.
Известно устройство для определения положения центра масс и моментов инерции объектов (Патент №2698536, РФ. Устройство для определения положения центра масс и моментов инерции объектов. Белоконов И.В., Баринова Е.В., Ивлиев А.А., Ключник В.Н., Тимбай И.А.), содержащее станину с соосными радиальными подшипниками качения, и датчиком положения равновесия шпинделя, шпиндель, выполненный в виде балки имеющей соосные шипы для установки в радиальные подшипники качения установленные на станине, и узел крепления торсиона, а также торсион, закрепленный верхним концом к станине, а нижним к шпинделю. Работа устройства основана на измерении периода колебаний рабочего стола с установленным на нем объектом.
Недостатком такого устройства является то, что при расположении балки шпинделя на удалении от оси вращения шпинделя момент инерции шпинделя относительно его оси вращения будет большим, что приводит к снижению точности измерений.
Целью изобретения является повышение точности устройства за счет уменьшения момента инерции шпинделя относительно его оси вращения при сохранении жесткости шпинделя на изгиб.
Указанная цель достигается тем, что в устройстве для определения положения центра масс и моментов инерции объектов, содержащем станину с установленными на ней, при помощи кронштейнов, двумя соосными радиальными подшипниками качения и узлом крепления торсиона, и шпиндель, выполненный виде балки с двумя шипами и узлом крепления торсиона, расположенный на станине таким образом, что шипы установлены в радиальных подшипниках качения с возможностью осевого перемещения, и торсион, прикрепленный верхним концом к станине, а нижним к шпинделю, балка выполнена полой и осесимметричной, шипы расположены на оси симметрии балки и в балке выполнены окна для прохода кронштейна верхнего радиального подшипника качения и доступа к узлам крепления торсиона.
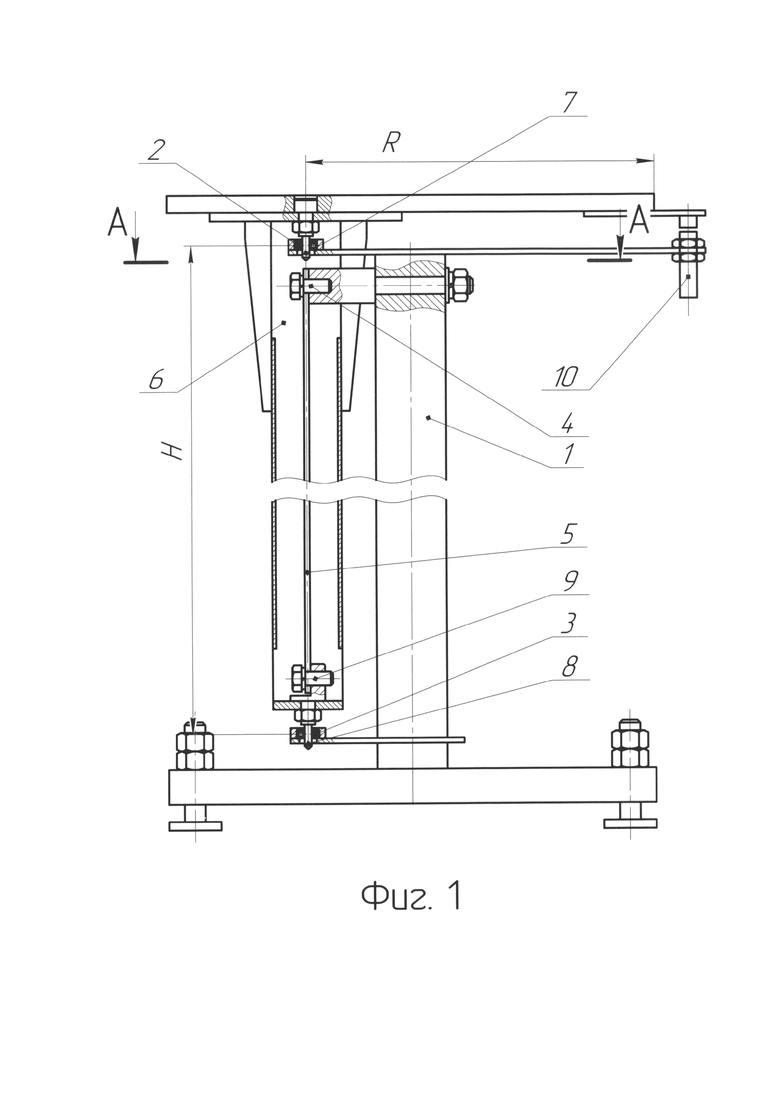
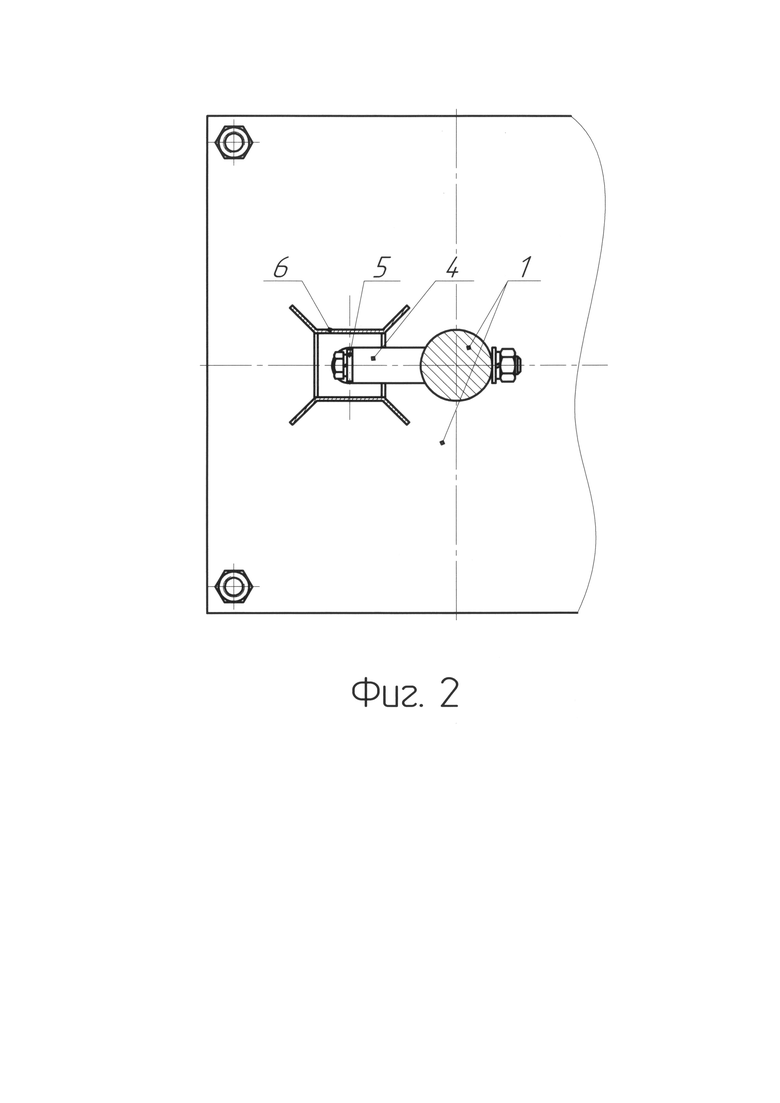
Устройство показано на фиг. 1. На фиг. 2 показан разрез А-А с фиг. 1.
На станине 1 установлены верхний 2 и нижний 3 радиальные подшипники качения, расположенные соосно. Под подшипником 2 установлен узел 4 крепления торсиона 5. На шпинделе 6, выполненном в виде балки, установлены верхний 7 и нижний 8 шипы для установки шпинделя 6 в подшипники 2 и 3 станины 1. В верхней части шип 8 имеет узел крепления 9 торсиона 5 расположенный внутри балки. В верхней части шпиндель 6 имеет планшайбу для установки оснастки базирования объекта. Станина 1 имеет датчик 10 положения равновесия шпинделя 6.
Шпиндель 6 висит на торсионе 5, а подшипники 2 и 3, задающие ось вращения вала 6, воспринимают только радиальную нагрузку, обусловленную несовпадением общего центра масс шпинделя 6, рабочего стола и объекта с осью вращения шпинделя 6.
Балка шпинделя 6 выполнена полой и осесимметричной, шип 7 и верхняя часть шипа 8 расположены внутри балки на ее оси симметрии и в балке выполнены окна для прохода кронштейна подшипника 2 и доступа к узлам крепления 4 и 9 торсиона 5. Поскольку центр масс балки шпинделя 6 находится на оси вращения шпинделя момент инерции шпинделя 6 относительно его оси вращения будет минимальным.
Так как радиальная нагрузка на подшипники 2 и 3 влияет на момент сопротивления вращению вала 6, для ее уменьшения расстояние (Н) между подшипниками 2 и 3 задано существенно большим отклонения (R) общего центра масс от оси вращения шпинделя 6.
Устройство работает следующим образом.
Шпиндель 6 отклоняется от положения равновесия и отпускается. Под воздействием торсиона 5 шпиндель 6 с рабочим столом и объектом совершает крутильные колебания. Момент прохождения шпинделя 6 через положение равновесия фиксируется датчиком 10.
Через период колебаний и крутильную жесткость вычисляется момент инерции колебательной системы. При смещении объекта по осям координат рабочего стола момент инерции колебательной системы изменяется и, соответственно, изменится период колебаний. После измерения периода колебаний шпинделя для различных положений объекта на рабочем столе и его различных ориентаций вычисляются координаты центра масс объекта, а затем и моменты инерции (с использованием теоремы Штейнера). Крутильная жесткость колебательной системы определяется путем проведения измерений для объекта (эталона) с известной массой и координатами центра масс, например, диска.
Предлагаемое техническое решение позволяет уменьшить собственный момент инерции шпинделя, являющийся для измерений паразитным, и, следовательно, повысить точность устройства для определения положения центра масс и моментов инерции объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения положения центра масс и моментов инерции объектов | 2022 |
|
RU2805249C1 |
| Устройство для определения положения центра масс и моментов инерции объектов | 2018 |
|
RU2698536C1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2568963C1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ МАССО-ЦЕНТРОВОЧНЫХ И МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ТВЕРДОГО ТЕЛА ВРАЩЕНИЯ | 2010 |
|
RU2445592C1 |
| СТАНОК ДЛЯ РУЧНОЙ ОГРАНКИ ДРАГОЦЕННЫХ КАМНЕЙ | 2000 |
|
RU2187420C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| ЛОПАСТНОЙ ПОДУЗЕЛ НЕСУЩЕГО ВИНТА БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2125952C1 |
| ДЕМПФИРУЮЩИЙ УЗЕЛ НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2117604C1 |
| СТЕНД КОМПЛЕКСНОГО ОПРЕДЕЛЕНИЯ МАССОВО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ОСЕСИММЕТРИЧНЫХ РОТОРОВ | 2009 |
|
RU2432557C2 |
Изобретение относится к области статической или динамической балансировки машин и конструкций, может быть использовано для определения моментов инерции и положения центра масс объектов. В устройстве для определения положения центра масс и моментов инерции объектов, содержащем станину, шпиндель с рабочим столом и торсион, шпиндель выполнен в виде балки с шипами, установленными в радиальных подшипниках качения станины. Торсион выполнен в виде стержня, закрепленного верхним концом к станине, а нижним к шпинделю. Торсион, балка, шипы балки и радиальные подшипники качения расположены соосно. В балке выполнены окна для прохода кронштейна верхнего подшипника и доступа к местам крепления торсиона. Технический результат заключается в повышении точности измерений за счет уменьшения собственного момента инерции шпинделя. 2 ил.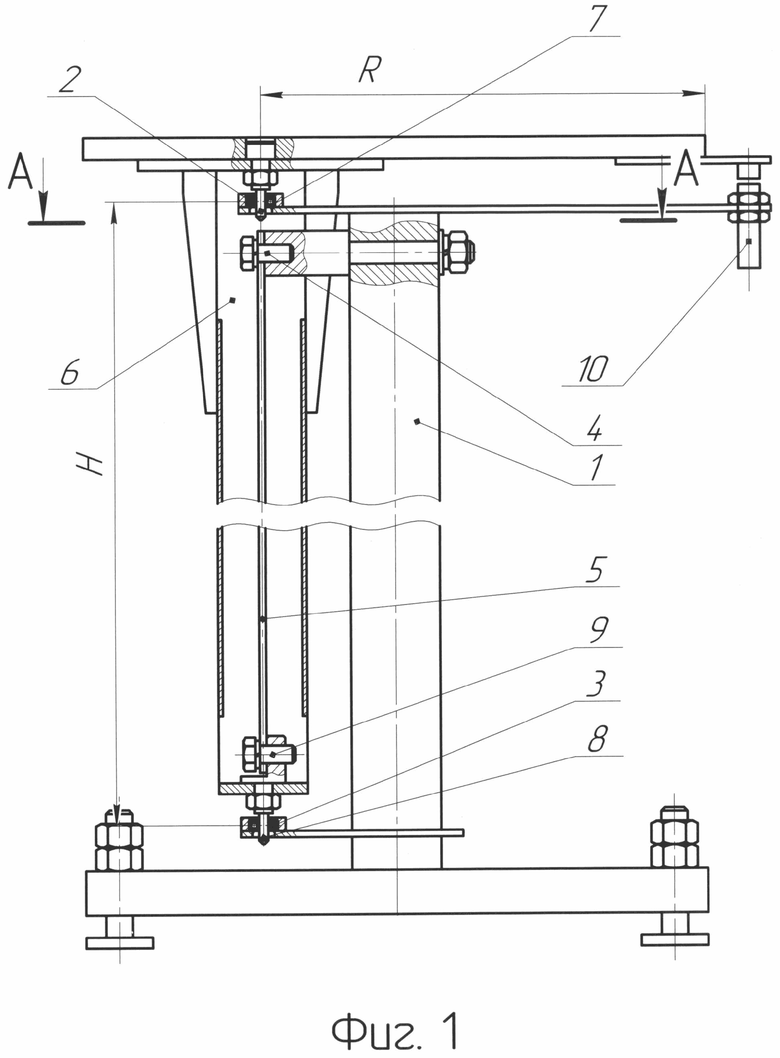
Устройство для определения положения центра масс и моментов инерции объектов, содержащее торсион, станину, с установленными на ней, при помощи кронштейнов, двумя соосными радиальными подшипниками качения и узлом крепления торсиона, и шпиндель, выполненный в виде балки с двумя шипами и узлом крепления торсиона, расположенный на станине таким образом, что шипы установлены в радиальных подшипниках качения с возможностью осевого перемещения, отличающееся тем, что балка выполнена полой и осесимметричной, шипы расположены на оси симметрии балки и в балке выполнены окна для прохода кронштейна с верхним радиальным подшипником качения и доступа к узлам крепления торсиона, при этом на станине при помощи кронштейна установлен датчик положения равновесия шпинделя.
| Устройство для определения положения центра масс и моментов инерции объектов | 2018 |
|
RU2698536C1 |
| Способ определения центрального момента инерции и координат центра масс в заданной плоскости и массы тела | 1982 |
|
SU1046633A1 |
| RU 95106906 A1, 27.11.1996 | |||
| Устройство для определения статических моментов и моментов инерции изделий | 1985 |
|
SU1596216A1 |
| CN 106500912 B, 24.05.2019. | |||
