Изобретение относится к медицинской технике - ультразвуковым датчикам измерения скорости кровотока в сосудах доплеровским методом.
Известны способы измерения скорости кровотока в сосудах с помощью ультразвуковых датчиков [1,2]. Так, в способе [1] используются три датчика, закрепленные на браслете с регулируемыми углами поворота секций браслета. Датчики последовательно излучают и принимают зондирующие сигналы, по измеренному сдвигу частоты определяются три радиальные проекции вектора скорости. В способе [2] один датчик излучает и принимает сигнал под двумя измеряемыми углами в направлении двух выбранных контрольных объемов сосуда на его малом участке, также измеряются расстояния до двух контрольных объемов и расстояние от датчика до сосуда. В результате в одной плоскости образуются два прямоугольных треугольника с одним общим измеренным катетом и с помощью двух измеренных углов определяются две радиальные проекции вектора скорости кровотока. Недостатками способа [2] являются наличие ошибок измерения расстояний от датчика до контрольных объемов сосуда и углов направления ультразвуковых лучей на выбранные контрольные объемы.
Наиболее близким к предлагаемому способу является способ [1], который алгоритмически заключается в следующем.
1. Три приемопередающих датчика закрепляют в трех секциях браслета. Секции имеют регулируемые углы взаимного поворота. Браслет помещают на руке.
2. Определяют три угла направления ультразвуковых лучей датчиков на контрольный объем сосуда и два угла взаимной ориентации боковых секций браслета относительно средней секции.
3. Датчики последовательно излучают и принимают сигнал. Измеряют доплеровский сдвиг частоты по трем каналам излучения. На основе трех проекций вектора скорости измеряют абсолютную величину скорости кровотока.
4. Формируют временной сигнал, отражающий величину измеренной абсолютной скорости, и отображают его на экране.
Данный способ обладает следующими недостатками.
1. Браслет невозможно применить для измерения скорости кровотока в сосудах шеи, сердца и других участков тела.
2. Последовательное излучение трех датчиков (отсутствие синхронизации) дает измерения разных фаз импульса кровотока, что приводит к ошибкам измерения истинной скорости кровотока.
3. Измерению скорости предшествует процедура настройки пяти разных углов, что затрудняет работу медицинского персонала по проведению диагностических операций в реальном времени.
Предлагаемое техническое решение направлено на устранение этих недостатков, а именно, на измерение скорости кровотока в сосудах любых участках тела, синхронную работу всех датчиков и упрощенную процедуру настройки только одного угла поворота.
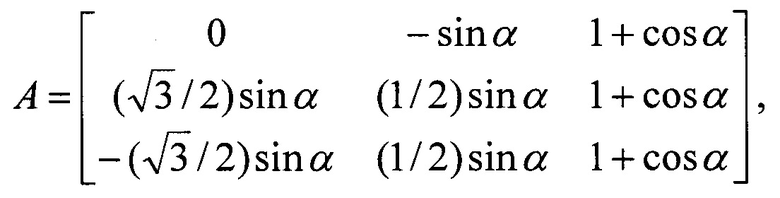
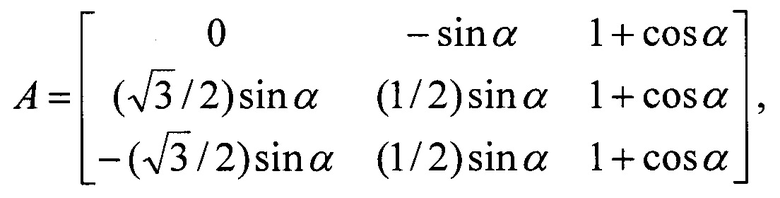
Технический результат предлагаемого технического решения достигается применением способа измерения скорости кровотока системой ультразвуковых датчиков, который заключается в пространственном размещении взаимно ориентированных ультразвуковых датчиков, излучении зондирующего сигнала и приеме отраженных сигналов, измерении доплеровских сдвигов частоты в датчиках и вычислении скорости кровотока, отличающийся тем, что размещают в корпусе прибора в виде усеченного конуса один приемопередающий датчик по центру большего основания конуса, прикладываемого к участку тела, и три принимающих боковых датчика, расположенных по окружности большего основания конуса с взаимным угловым отклонением 120°, излучают сигнал центральным датчиком по осевой линии конуса в направлении исследуемого контрольного объема сосуда и принимают отраженный сигнал боковыми датчиками, наклоненными под регулируемым углом α к осевой линии конуса, измеряют доплеровский сдвиг частот в трех боковых датчиках и на основе измеренных частот вычисляют вектор V трех координат скорости движения кровотока по формуле V=λ⋅А-1⋅F, где λ - длина ультразвуковой волны, F - вектор трех измеренных доплеровских частот, А - матрица вида

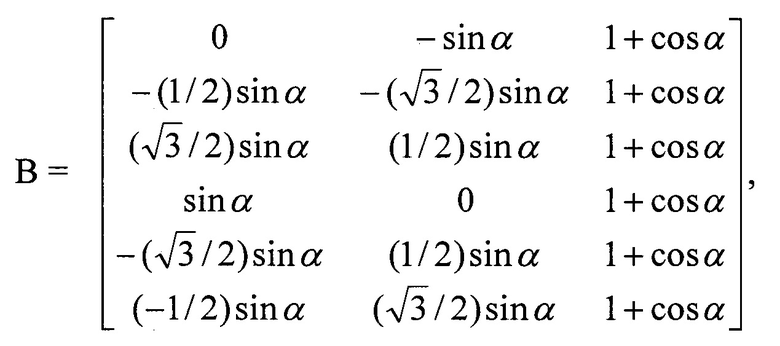
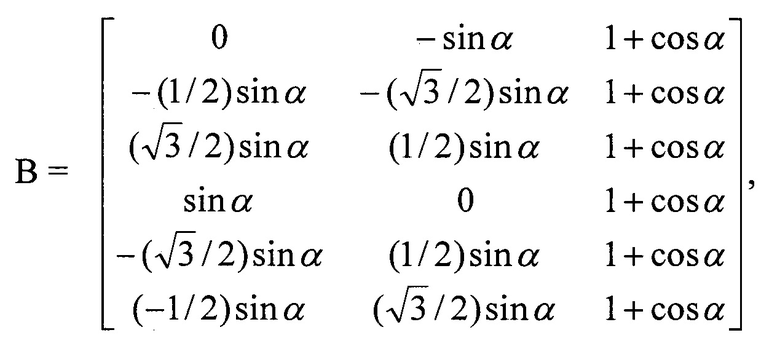
далее отображают величину скорости как норму вектора V в реальном времени на экране индикатора и выбирают регулируемый угол наклона α по максимальной величине скорости, которую принимают за измеренную максимальную скорость кровотока, причем для измерения скорости кровотока в сосудах на большой глубине увеличивают в два раза число принимающих датчиков с регулируемым углом наклона α, размещают датчики по окружности парами с угловым расстоянием между соседними парами 90° так, чтобы противоположные датчики не лежали на одной прямой, включают в состав вектора F дополнительно три доплеровские частоты, заменяют матрицу А на матрицу В:
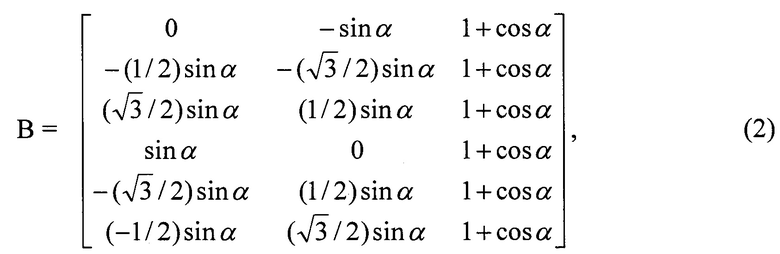
и вычисляют вектор скорости V по формуле V=λ(ВТВ)BTF, где Т - символ транспонирования.
Алгоритмически способ заключается в следующем.
1. Размещают в корпусе прибора в виде усеченного конуса один приемопередающий датчик по центру большего основания конуса, прикладываемого к участку тела, и три принимающих боковых датчика, расположенных по окружности большего основания конуса с взаимным угловым отклонением 120° и имеющих регулируемый угол наклона α к оси конуса.
2. Прикладывают корпус прибора большим основанием к участку тела в направлении сосуда.
3. Излучают сигнал центральным датчиком по осевой линии конуса в направлении исследуемого контрольного объема сосуда и принимают отраженный сигнал тремя боковыми датчиками, наклоненными под начальным регулируемым углом наклона α=60°.
4. Измеряют доплеровские сдвиги частот ƒ1, ƒ2, ƒ3 в трех боковых датчиках и на основе измеренных частот вычисляют вектор V=(vx,vy,vz)T трех координат скорости движения кровотока (T - символ транспонирования) по формуле

5. Отображают величину скорости  как норму вектора V в реальном времени t на экране индикатора.
как норму вектора V в реальном времени t на экране индикатора.
6. Выбирают регулируемый угол наклона α по максимальной величине скорости νmax, которую принимают за измеренную максимальную скорость кровотока.
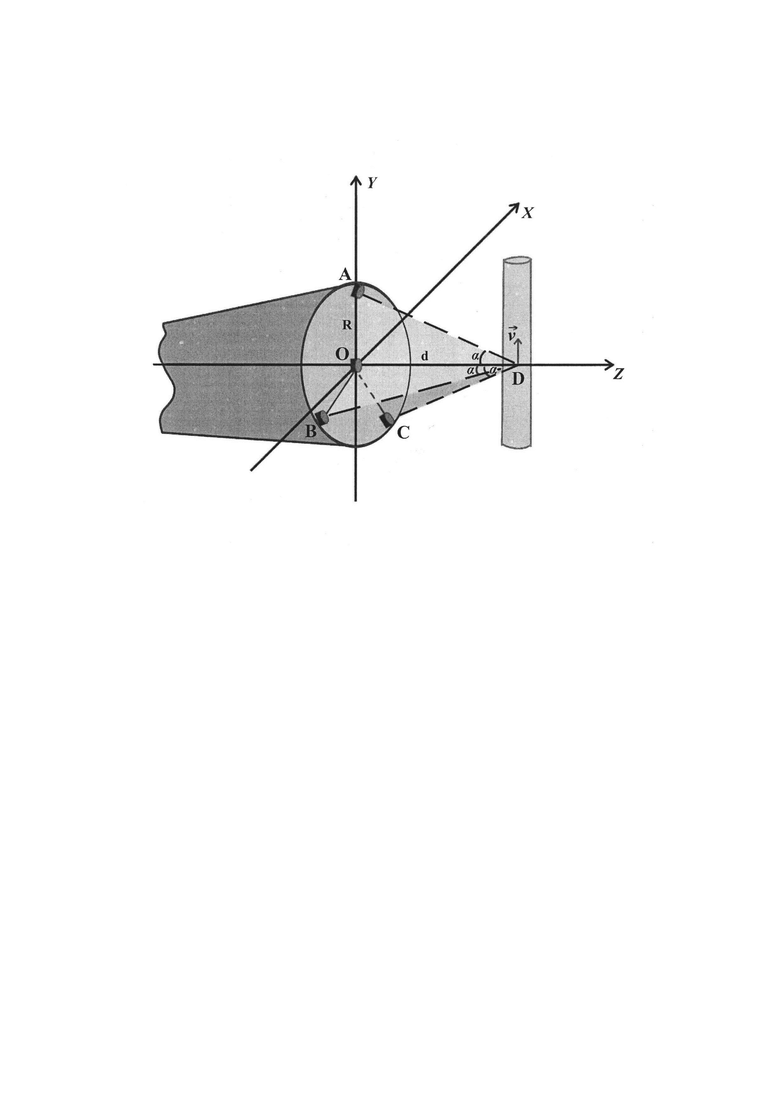
7. Для измерения скорости кровотока в сосудах на большой глубине d (см. фигуру) увеличивают в два раза число принимающих датчиков с регулируемым углом наклона α, размещают датчики по окружности парами с угловым расстоянием между соседними парами 90° так, чтобы противоположные датчики не лежали на одной прямой, включают в состав вектора F дополнительно три доплеровские частоты: F=(ƒ1,ƒ2,ƒ3,ƒ4,ƒ5,ƒ6)T, меняют матрицу А на матрицу В формулы (2) и вычисляют вектор скорости V как V=λ(ВТВ)-1BTF.
Расчетная часть
Фигура
На фигуре изображен усеченный конус в прямоугольной системе координат OXYZ, где ось OZ направлена по оси конуса в сторону излучения, а оси ОХ и OY расположены в плоскости большего основания конуса. В точке O(0,0,0) центра основания расположен центральный передающий ультразвуковой датчик, в точках A(0,R,0),  и
и  , делящих окружность основания на равные части, расположены принимающие датчики (R - радиус большего основания). Передающий луч направлен по оси конуса. Принимающие лучи, отраженные от точки D(0,0,Rctgα) пересечения оси конуса с отражающим объемом сосуда, составляет с осью конуса общий угол α.
, делящих окружность основания на равные части, расположены принимающие датчики (R - радиус большего основания). Передающий луч направлен по оси конуса. Принимающие лучи, отраженные от точки D(0,0,Rctgα) пересечения оси конуса с отражающим объемом сосуда, составляет с осью конуса общий угол α.
Орты векторов  соответственно определяются как
соответственно определяются как

Радиальные проекции вектора скорости  на направления ортов
на направления ортов  ,
,  находятся как скалярные произведения вектора скорости на орты:
находятся как скалярные произведения вектора скорости на орты:

Доплеровские частоты в приемных датчиках определяются формулой

С учетом (4) система уравнений (5) в координатной форме принимает вид  или в матричной форме
или в матричной форме

где матрица в (7) имеет конкретный вид (1).
Оценка вектора V находится методом обратной матрицы:

Для повышения точности оценок скорости число приемных датчиков, размещенных по окружности увеличивают до n (n>3). Система уравнений (6) становится переопределенной и выражение (7) принимает вид
где E - вектор ошибок измерения доплеровских частот.
По критерию минимума квадрата нормы вектора ошибок

из необходимого условия экстремума (10) находится вектор V оценок координат вектора скорости V:

При n=3 формула (11) принимает вид (8).
Точность оценок (11) определяется ковариационной матрицей KΔV ошибок ΔV оценок (или самих несмещенных оценок  ):
):

Для некоррелированного вектора ошибок Е матрица KΔV имеет вид

где М - символ математического ожидания;  - дисперсия центрированной ошибки измерения частоты.
- дисперсия центрированной ошибки измерения частоты.
Удобно погрешность отдельной координаты вектора ошибок оценить по формуле (Tr - след матрицы)

Норма вектора ошибок ||ΔF||=Δν, как скалярная случайная величина, распределена по закону Максвелла со средним значением Δνcp и среднеквадратическим отклонением (СКО) σΔν:

С учетом (13) средняя ошибка измерения скорости в (14) вычисляется как

Для матрицы А, заданной выражением (1), обратная матрица в (15) раскрывается как диагональная матрица вида

и формула (15) при подстановке (16) принимает вид

Для уменьшения средней ошибки (17) предусматривается увеличение числа приемных датчиков в два раза и их расположение по окружности основания парами в точках А, А', В, В', С, С' с координатами

При этом матрица А координат ортов, находящаяся в составе уравнения (9), принимает вид матрицы В, заданной выражением (2). Оценка вектора скорости  находится по формуле (11), а средняя ошибка Δνcp - по формуле (15) путем замены матрицы А на матрицу В. При этом обратная матрица (ВТВ)-1 раскрывается как диагональная матрица вида
находится по формуле (11), а средняя ошибка Δνcp - по формуле (15) путем замены матрицы А на матрицу В. При этом обратная матрица (ВТВ)-1 раскрывается как диагональная матрица вида
где а и b определены в (16). Соответственно средняя ошибка уменьшается в  раз:
раз:

Расчет средней ошибки
Известно [3], что в практике ультразвуковых измерений используются несущие частоты f0=2÷10 МГц. Для скорости распространения ультразвуковой волны с=1540 м/с длина волны составляет
λ=1540/ƒ0=(154÷770)⋅10-6 (м).
Формула (17) расчета ошибки измерения скорости для указанных диапазонов и случая трех приемных датчиков (n=3) принимает вид

где а и b определены в (16) и зависят от угла α.
Известно также [4, 5], что скорость кровотока в магистральной артерии v=0,15 м/с, ветвящейся артерии v=0,08 м/с. Примем v=0,1 м/с. Доплеровская частота в каждом k-м приемном датчике для диапазона углов наклона α=(30°÷60°) составляет

Примем СКО ошибки измерения ƒk равной σƒ=10 Гц.
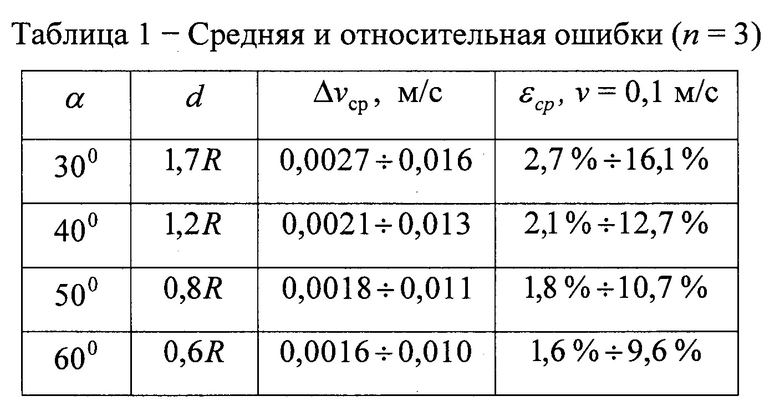
В таблице 1 показан расчет диапазонов средней ошибки (19) и средней относительной ошибки в процентах εср=(Δνcp/v)⋅100% для разных значений угла α и скорости v при σƒ=10 Гц. Указано расстояние d от центрального излучающего датчика до сосуда в зависимости от угла α:d=R⋅ctga.
Расчет для шести приемных датчиков (n=6) представлен таблицей 2.
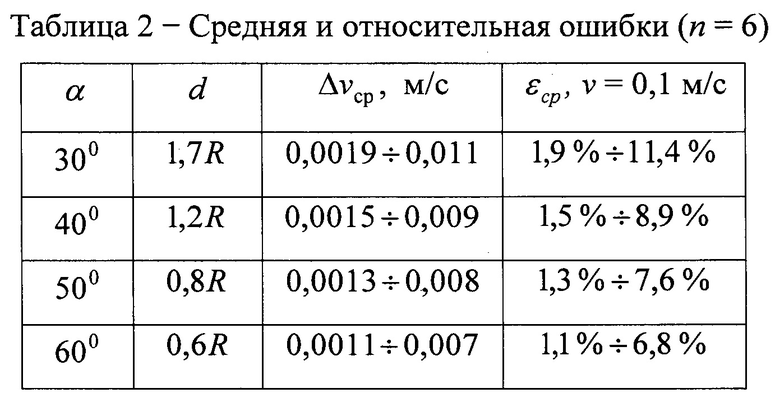
Из таблиц 1 и 2 следует, что меньшие значения средней ошибки в диапазонах, указанных в таблицах, соответствую большим частотам излучения. То есть средняя ошибка измерения уменьшается с увеличением частоты зондирования. С увеличением глубины измерения (расстояния d до сосуда), то есть уменьшения угла α, средняя ошибка увеличивается.
Увеличение ошибки можно компенсировать увеличением радиуса основания конуса R, но при этом увеличиваются размеры диагностического прибора. Поэтому компенсировать рост ошибки можно увеличением числа приемных датчиков от трех до шести (таблица 2 в сравнении с таблицей 1).
Как следует из (19) уменьшение средней ошибки Δνcp также можно достичь уменьшением погрешности измерения доплеровской частоты σƒ.
Увеличение числа приемных датчиков не приводит к увеличению энергетической нагрузки прибора, так как излучает один центральный датчик.
Выводы
Предложенный способ, в отличие от прототипа, позволяет измерять скорость кровотока в сосудах любого участка тела и с более простой настройкой измерительного прибора по одному углу в реальном времени диагностирования. Результаты измерения не зависят от угла между распространением ультразвукового луча и направлением кровотока в сосуде, то есть наклона прибора. Способ удобен для проведения ультразвуковых измерений медицинским персоналом.
Литература
1. Патент RU 2 246 896. Способ измерения скорости кровотока и устройство для его реализации / Проскуряков Г.М., Абросимов Д.А. Приоритет 30.10.2001. Опубл. 27.02.2005. Бюл. №6.
2. Патент RU 2 585 416. Способ измерения скорости кровотока / Иванов О.В. Приоритет 01.06.2015. Опубл. 27.05.2016. Бюл. №15.
3. Осипов Л.В. Ультразвуковые диагностические приборы: практическое руководство для пользователей. М.: Видар, 1999. 256 с.
4. Лелюк В.Г., Лелюк С.Э. Ультразвуковая ангиология. М.: Реальное время, 2003. 336 с.
5. Ультразвуковая диагностика сосудистых заболеваний / Под ред. В.П. Куликова. М.: СТРОМ, 2007. 512 с.
Изобретение относится к медицинской технике – к ультразвуковым датчикам измерения скорости кровотока в сосудах доплеровским методом. Способ измерения скорости кровотока системой ультразвуковых датчиков заключается в пространственном размещении взаимно ориентированных ультразвуковых датчиков, излучении зондирующего сигнала и приеме отраженных сигналов, измерении доплеровских сдвигов частоты в датчиках и вычислении скорости кровотока. При этом размещают в корпусе прибора в виде усеченного конуса один приемопередающий датчик по центру большего основания конуса, прикладываемого к участку тела, и три принимающих боковых датчика, расположенных по окружности большего основания конуса с взаимным угловым отклонением 120°. Излучают сигнал центральным датчиком по осевой линии конуса в направлении исследуемого контрольного объема сосуда и принимают отраженный сигнал боковыми датчиками, наклоненными под регулируемым углом наклона α к осевой линии конуса. Измеряют доплеровский сдвиг частот в трех боковых датчиках и на основе измеренных частот вычисляют вектор V трех координат скорости движения кровотока по формуле V=λ⋅А-1⋅F, где λ - длина ультразвуковой волны, F - вектор трех измеренных доплеровских частот, А - матрица вида
далее отображают величину скорости как норму вектора V в реальном времени на экране индикатора и выбирают регулируемый угол наклона α по максимальной величине скорости, которую принимают за измеренную максимальную скорость кровотока. Для измерения скорости кровотока в сосудах на большой глубине увеличивают в два раза число принимающих датчиков с регулируемым углом наклона α, размещают датчики по окружности парами с угловым расстоянием между соседними парами 90° так, чтобы противоположные датчики не лежали на одной прямой, включают в состав вектора F дополнительно три доплеровские частоты, заменяют матрицу А на матрицу В:
и вычисляют вектор скорости V по формуле 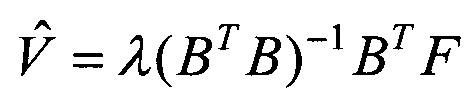 , где Т - символ транспонирования. Изобретение направлено на измерение скорости кровотока в сосудах любых участков тела, синхронную работу всех датчиков и упрощенную процедуру настройки только одного угла поворота. 2 табл., 1 ил.
, где Т - символ транспонирования. Изобретение направлено на измерение скорости кровотока в сосудах любых участков тела, синхронную работу всех датчиков и упрощенную процедуру настройки только одного угла поворота. 2 табл., 1 ил.
Способ измерения скорости кровотока системой ультразвуковых датчиков, заключающийся в пространственном размещении взаимно ориентированных ультразвуковых датчиков, излучении зондирующего сигнала и приеме отраженных сигналов, измерении доплеровских сдвигов частоты в датчиках и вычислении скорости кровотока, отличающийся тем, что размещают в корпусе прибора в виде усеченного конуса один приемопередающий датчик по центру большего основания конуса, прикладываемого к участку тела, и три принимающих боковых датчика, расположенных по окружности большего основания конуса с взаимным угловым отклонением 120°, излучают сигнал центральным датчиком по осевой линии конуса в направлении исследуемого контрольного объема сосуда и принимают отраженный сигнал боковыми датчиками, наклоненными под регулируемым углом наклона α к осевой линии конуса, измеряют доплеровский сдвиг частот в трех боковых датчиках и на основе измеренных частот вычисляют вектор V трех координат скорости движения кровотока по формуле V=λ⋅А-1⋅F, где λ - длина ультразвуковой волны, F - вектор трех измеренных доплеровских частот, А - матрица вида
далее отображают величину скорости как норму вектора V в реальном времени на экране индикатора и выбирают регулируемый угол наклона α по максимальной величине скорости, которую принимают за измеренную максимальную скорость кровотока, причем для измерения скорости кровотока в сосудах на большой глубине увеличивают в два раза число принимающих датчиков с регулируемым углом наклона α, размещают датчики по окружности парами с угловым расстоянием между соседними парами 90° так, чтобы противоположные датчики не лежали на одной прямой, включают в состав вектора F дополнительно три доплеровские частоты, заменяют матрицу А на матрицу В:
и вычисляют вектор скорости V по формуле 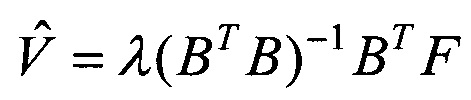 , где Т - символ транспонирования.
, где Т - символ транспонирования.
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ КРОВОТОКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2246896C2 |
| WO 2013001503 A2, 03.01.2013 | |||
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВИНТОВОГО ДВИЖЕНИЯ КРОВИ В АРТЕРИЯХ | 2008 |
|
RU2380040C1 |
| WO 9532667 A1, 07.12.1995. | |||
