Изобретение относится к многопозиционным радиотехническим доплеровским системам наблюдения за объектами. Система состоит из нескольких приемников и передатчиков. Приемники принимают отраженные сигналы, излучаемые внешними передатчиками на определенных частотах.
Известен способ [1, с. 333] определения вектора скорости объекта в доплеровских наземных или бортовых системах. Он основан на использовании нескольких совмещенных приемников и передатчиков с приемопередающими антеннами и алгоритмически сводится к следующему.
1. Размещают n=3 приемопередающих станций с антеннами, ориентированными в пространстве относительно единой системы координат OXYZ матрицами  поворота осей антенных систем координат относительно единой системы.
поворота осей антенных систем координат относительно единой системы.
2. Определяют векторы координат объекта 
 в системах координат k-х приемопередающих станций на основе измеренных угловых координат объекта (азимута и угла места амплитудно-фазовым методом) и дальностей
в системах координат k-х приемопередающих станций на основе измеренных угловых координат объекта (азимута и угла места амплитудно-фазовым методом) и дальностей  (по временной задержке сигналов).
(по временной задержке сигналов).
3. Вычисляют орты  векторов направлений к объекту от k-х приемников в системах координат станций:
векторов направлений к объекту от k-х приемников в системах координат станций: 
4. Измеряют доплеровские сдвиги частоты fl, f2, f3 принимаемых в приемниках сигналов, зависящие от радиальных составляющих вектора  скорости объекта: fk=2νrk/λ,
скорости объекта: fk=2νrk/λ, 
где λ=с/f0 - длина волны передатчика (с - скорость свет, f0 - несущая частота);  - радиальная проекция вектора скорости
- радиальная проекция вектора скорости  на направление
на направление 
5. Составляют систему уравнений связи доплеровских частот с искомыми координатами вектора скорости через скалярные произведения векторов в единой системе координат:

где  - вектор-столбец координат орта
- вектор-столбец координат орта  , пересчитанных в единую систему координат с помощью матрицы поворота осей Hk ("Т" - символ транспонирования).
, пересчитанных в единую систему координат с помощью матрицы поворота осей Hk ("Т" - символ транспонирования).
6. Вычисляют координаты νx, νy, νz искомого вектора скорости  из решения системы уравнений (1), представленной в матричной форме:
из решения системы уравнений (1), представленной в матричной форме:

с помощью обратной матрицы по формуле:

где А - (3×3)-матрица координат ортов; V - (3×1)-вектор-столбец координат вектора скорости; F - (3×1)-вектор-столбец доплеровских частот.
7. Повторяют все операции в последовательности моментов времени ts,  где m - количество таких моментов.
где m - количество таких моментов.
Замечание. Вычисление вектора-столбца скорости V алгебраическим способом по формуле (3) равносильно геометрическому способу нахождения вектора  по правилу сложения трех векторов - его геометрических проекций по направлениям приемников в единой системе координат:
по правилу сложения трех векторов - его геометрических проекций по направлениям приемников в единой системе координат:

Рассмотренный способ обладает следующими недостатками.
1. Совмещение приемников с передатчиками делает систему пеленгации объектов уязвимой по сравнению с пространственно распределенными приемниками и передатчиками.
2. Фиксированное число передатчиков (три) в определенных условиях наблюдения является избыточным из соображений аппаратурных и энергетических затрат, так как может быть уменьшено до одного передатчика.
3. Фиксированное число приемников (три) не позволяет увеличить это число для повышения точности измерения координат вектора скорости.
4. В случае применения способа для многопозиционной системы с отдельно расположенными приемниками и передатчиками вычисления по формулам (1)-(4) дают ошибки из-за не учета проекций вектора скорости на направления от передатчиков к объекту.
Предлагаемое техническое решение направлено на устранение указанных недостатков, а именно, позволяет осуществлять пространственное разделение передатчиков и приемников, использовать произвольное число n приемников (n≥3) и произвольное число m передатчиков (m≥1), а также учитывать направления на объект со стороны удаленных передатчиков.
Технический результат предлагаемого технического решения достигается применением способа определения вектора скорости объекта многопозиционной доплеровской системой, который заключается в размещении нескольких n приемников, приема в них сигналов отражения от объекта, ориентировании приемников в единой системе координат матрицами поворота осей координат, определении ортов aks направлений на объект от k-х приемников ( ) в моменты времени ts (
) в моменты времени ts ( где m - количество таких моментов), измерении доплеровских сдвигов частот fks принимаемых в k-х приемниках сигналов в моменты времени ts и составлении n-вектора F доплеровских частот, пересчете координат ортов aks в единую систему координат и формировании из них матрицы А, затем вычислении вектора V координат скорости объекта по формуле V=λA-1F, где λ - длина волны излучаемого передатчиком сигнала, отличающийся тем, что назначают произвольное число n приемников (n≥3), располагают удаленно от приемников s-е передатчики общим числом т (
где m - количество таких моментов), измерении доплеровских сдвигов частот fks принимаемых в k-х приемниках сигналов в моменты времени ts и составлении n-вектора F доплеровских частот, пересчете координат ортов aks в единую систему координат и формировании из них матрицы А, затем вычислении вектора V координат скорости объекта по формуле V=λA-1F, где λ - длина волны излучаемого передатчиком сигнала, отличающийся тем, что назначают произвольное число n приемников (n≥3), располагают удаленно от приемников s-е передатчики общим числом т ( m≥1) и ориентируют их в единой системе координат, затем излучают сигналы от передатчиков с разной длиной волны Xs последовательно с малой задержкой в моменты времени ts, определяют орты bs направлений на объект со стороны s-x передатчиков (
m≥1) и ориентируют их в единой системе координат, затем излучают сигналы от передатчиков с разной длиной волны Xs последовательно с малой задержкой в моменты времени ts, определяют орты bs направлений на объект со стороны s-x передатчиков ( ) и пересчитывают орты в единую систему координат, затем помещают координаты ортов bs вместе с координатами ортов ak в состав (mnx3)-матрицы А и вычисляют вектор скорости по формуле V=(ATA)-1ATΛF, где Λ - диагональная матрица, составленная из λs, a F - mn-вектор-столбец доплеровских частот fks, кроме того, если при m>1 и n>3 отказывает какой-либо приемник или передатчик, то соответствующие им строки в матрице А и векторе F исключают и все операции повторяют.
) и пересчитывают орты в единую систему координат, затем помещают координаты ортов bs вместе с координатами ортов ak в состав (mnx3)-матрицы А и вычисляют вектор скорости по формуле V=(ATA)-1ATΛF, где Λ - диагональная матрица, составленная из λs, a F - mn-вектор-столбец доплеровских частот fks, кроме того, если при m>1 и n>3 отказывает какой-либо приемник или передатчик, то соответствующие им строки в матрице А и векторе F исключают и все операции повторяют.
Замечание. Увеличение числа удаленных передатчиков приводит к повышению надежности - вероятности Pm работы хотя бы одного из m передатчиков при вероятности р безотказной работы каждого из них:
Pm=1-(1-р)m.
Так, при р = 0,7 и m = 3 получаем надежность Р3=0,97.
Алгоритмически способ осуществляется следующим образом.
1. Размещают k-е приемники общим числом n (n≥3) и ориентируют их в пространстве относительно единой системы координат OXYZ матрицами Нк,  поворота осей антенных систем координат относительно единой системы.
поворота осей антенных систем координат относительно единой системы.
2. Размещают s-e передатчики общим числом m ( ) удаленно от приемников и ориентируют их относительно системы координат OXYZ матрицами H0s,
) удаленно от приемников и ориентируют их относительно системы координат OXYZ матрицами H0s,  поворота осей.
поворота осей.
3. Излучают сигналы от передатчиков с разной длиной волны λs последовательно с малой задержкой в моменты времени ts. Определяют орты  направлений на объект со стороны s-x передатчиков на основе измеренных угловых координат объекта азимута и угла места (амплитудно-фазовым методом) и пересчитывают орты в единую систему координат в матричной форме:
направлений на объект со стороны s-x передатчиков на основе измеренных угловых координат объекта азимута и угла места (амплитудно-фазовым методом) и пересчитывают орты в единую систему координат в матричной форме:

4. Вычисляют в моменты времени ts,  орты
орты  векторов направлений на объект в системах координат k-х приемников на основе измеренных угловых координат объекта азимута и угла места (амплитудно-фазовым методом) и пересчитывают орты в единую систему координат в матричной форме:
векторов направлений на объект в системах координат k-х приемников на основе измеренных угловых координат объекта азимута и угла места (амплитудно-фазовым методом) и пересчитывают орты в единую систему координат в матричной форме:

5. Измеряют доплеровские частоты fks в моменты ts в k-х приемниках:

где  и
и  - соответственно проекции вектора скорости на направления к объекту от s-го передатчика и k-го приемника в момент ts.
- соответственно проекции вектора скорости на направления к объекту от s-го передатчика и k-го приемника в момент ts.
6. Вычисляют проекции скорости с помощью скалярных произведений:


и представляют систему mn уравнений (5) с учетом (6) в матричной форме:
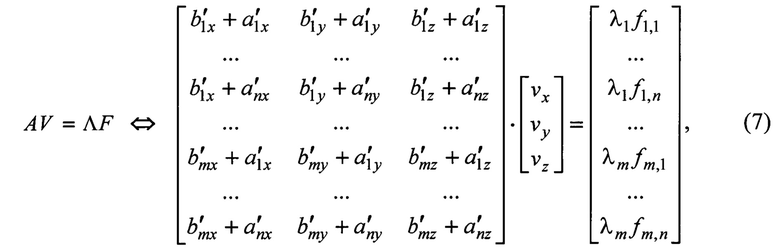
где Λ - (mnxmn)-диагональная матрица, F - mn-вектор-столбец:
Λ=diag(λ1, …, λ1, …, λm, …, λm), F=(f1,1, …, f1,n, …, fm,1, …,fmn)Т.
7. Решают систему (7) методом наименьших квадратом с учетом невязок правых частей и вычисляют вектор  оценок координат вектора скорости v объекта в матричной форме:
оценок координат вектора скорости v объекта в матричной форме:

8. Если при m>1 и n>3 отказывает какой-либо приемник или передатчик, то соответствующие им строки в матрице А и векторе F исключают и все операции повторяют.
Замечание. Погрешность оценок скорости можно характеризовать СКО σ[Δνx] центрированной ошибки Δνx оценивания отдельной координаты вектора скорости с усреднением по числу mn на основе следа (Tr) ковариационной матрицы вектора ошибок  по формуле:
по формуле:

где σΔf - СКО измерения доплеровского сдвига частоты.
В частном случае использования одного передатчика с длиной волны λ формулы (7)-(9) упрощаются и принимают вид


Заключение. Увеличение числа приемников и передатчиков, а также учет направлений на объект со всех точек пеленгации приводит к повышению точности оценок координат вектора скорости объекта и надежности работы системы в целом, что подтверждается расчетами (9) при моделировании.
Литература
1. Бакулев П.А. Радиолокационные системы: учебник для вузов. М.: Радиотехника, 2015. 440 с.
Изобретение относится к многопозиционным радиотехническим доплеровским системам наблюдения за объектами. Система состоит из нескольких приемников и передатчиков. Приемники принимают отраженные сигналы, излучаемые внешними передатчиками на определенных частотах. Предложенный способ, в отличие от прототипа, позволяет осуществлять пространственное разделение передатчиков и приемников, использовать произвольное число приемников и произвольное число передатчиков, а также учитывать направления на объект со стороны удаленных передатчиков. Вектор скорости движения объекта находится решением системы линейных алгебраических уравнений с учетом ортов направлений на объект и измеренных доплеровских частот в единой системе координат. Увеличение числа приемников и передатчиков, а также учет направлений на объект со всех точек пеленгации приводит к повышению точности оценок координат вектора скорости объекта и надежности работы системы в целом. Способ может быть использован в многопозиционных системах пеленгации объектов с пространственным разделением произвольного числа передатчиков и приемников.
Способ определения вектора скорости объекта многопозиционной доплеровской системой, заключающийся в размещении нескольких n приемников, приеме в них сигналов отражения от объекта, ориентировании приемников в единой системе координат матрицами поворота осей координат, определении ортов aks направлений на объект от k-х приемников ( ) в моменты времени ts (
) в моменты времени ts ( где m - количество таких моментов), измерении доплеровских сдвигов частот fks принимаемых в k-х приемниках сигналов в моменты времени ts и составлении n-вектора F доплеровских частот, пересчете координат ортов aks в единую систему координат и формировании из них матрицы А, затем вычислении вектора V координат скорости объекта по формуле V=λA-1F, где λ - длина волны излучаемого передатчиком сигнала, отличающийся тем, что назначают произвольное число n приемников (n≥3), располагают удаленно от приемников s-e передатчики общим числом m (
где m - количество таких моментов), измерении доплеровских сдвигов частот fks принимаемых в k-х приемниках сигналов в моменты времени ts и составлении n-вектора F доплеровских частот, пересчете координат ортов aks в единую систему координат и формировании из них матрицы А, затем вычислении вектора V координат скорости объекта по формуле V=λA-1F, где λ - длина волны излучаемого передатчиком сигнала, отличающийся тем, что назначают произвольное число n приемников (n≥3), располагают удаленно от приемников s-e передатчики общим числом m ( m≥1) и ориентируют их в единой системе координат, затем излучают сигналы от передатчиков с разной длиной волны λs последовательно с малой задержкой в моменты времени ts, определяют орты bs направлений на объект со стороны s-x передатчиков (
m≥1) и ориентируют их в единой системе координат, затем излучают сигналы от передатчиков с разной длиной волны λs последовательно с малой задержкой в моменты времени ts, определяют орты bs направлений на объект со стороны s-x передатчиков ( ) и пересчитывают орты в единую систему координат, затем помещают координаты ортов bs вместе с координатами ортов ak в состав (mnx3)-матрицы А и вычисляют вектор скорости по формуле V=(ATA)-1ATΛF, где Λ - диагональная матрица, составленная из λs, a F - mn-вектор-столбец доплеровских частот fks, кроме того, если при m>1 и n>3 отказывает какой-либо приемник или передатчик, то соответствующие им строки в матрице A и векторе F исключают и все операции повторяют.
) и пересчитывают орты в единую систему координат, затем помещают координаты ортов bs вместе с координатами ортов ak в состав (mnx3)-матрицы А и вычисляют вектор скорости по формуле V=(ATA)-1ATΛF, где Λ - диагональная матрица, составленная из λs, a F - mn-вектор-столбец доплеровских частот fks, кроме того, если при m>1 и n>3 отказывает какой-либо приемник или передатчик, то соответствующие им строки в матрице A и векторе F исключают и все операции повторяют.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2012 |
|
RU2516432C2 |
| Способ пассивной однопозиционной угломерно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2019 |
|
RU2699552C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ, СКОРОСТИ И УСКОРЕНИЯ ОБЪЕКТА В ПАССИВНОЙ СКАНИРУЮЩЕЙ СИСТЕМЕ ВИДЕНИЯ | 2018 |
|
RU2700275C1 |
| СПОСОБ НАХОЖДЕНИЯ СОПРЯЖЕННЫХ ВЕКТОРОВ НАПРАВЛЕНИЙ НА ДВИЖУЩИЕСЯ ОБЪЕКТЫ | 2018 |
|
RU2694023C1 |
| US 20040233102 A1, 25.11.2004. | |||

