Область техники, к которой относится изобретение
Изобретение относится к системам хранения высокой плотности, позволяющим автоматизировать и оптимизировать процессы обработки и перемещения паллетированных грузов при глубинном хранении.
Уровень техники
Из уровня техники известен шаттл автоматизированной системы паллетного хранения (см. CN 112978183 A, опуб. 18.06.2021), содержащий контроллер, датчик, реверсивный приводной двигатель, кулачковый механизм специальной формы, реверсивный кронштейн, шагающий приводной двигатель, редуктор скорости. Известный шаттл ввиду простоты своей конструкции оснащен малыми функциональными возможностями, что не позволяет в достаточной степени автоматизировать процессы обработки и перемещения паллетированных грузов.
Также из уровня техники известен шаттл автоматизированной системы паллетного хранения (см. CN 102730358 A, опуб. 17.10.2012), снабженный направляющими колесами, выполненными симметричными с возможностью поворота и расположения на боковых стенках рамы шаттла. Датчики закреплены на передней, задней, левой, правой и верхней сторонах рамы шаттла и передают сигналы на контроллер, выполненный с возможностью подсчета количества товаров на складе. Пульт дистанционного управления отправляет сигналы на приемник дистанционного управления, который в свою очередь закреплен на раме шаттла и может принимать сигнал, отправленный пультом дистанционного управления, передавать сигнал на контроллер. Осуществлена функция торможения при обнаружении препятствий. Данному техническому решению также присущ недостаток, заключающийся в малых функциональных возможностях шаттла, что в свою очередь не позволяет в достаточной степени автоматизировать процессы обработки и перемещения паллетированных грузов.
Наиболее близким аналогом изобретения, принятым в качестве прототипа, является автоматизированная система высокой плотности хранения (см. WO 2015131924 A1, опуб. 11.09.2015), содержащая стеллаж с рельсами, по которым перемещаются автономные радиоуправляемые тележки, которые, выполняя работу за подъемно-транспортную технику и оператора, производят операции по загрузке-выгрузке и перемещению грузов внутри канала стеллажа, свободно передвигаясь под паллетами, стоящими на ложементах. Радиоуправляемые тележки содержат раму, ходовую часть с колесами и приводом, грузовую платформу с подъемным устройством, устройство передачи информации, контроллер и сенсорное устройство с оптическими датчиками для позиционирования тележки - определения конца и начала коридора. Прототипу также присущ недостаток в малой автоматизации процессов обработки и перемещения паллетированных грузов при глубинном хранении, обусловленный узким перечнем функциональных возможностей радиоуправляемого шаттла.
Технической задачей изобретения является преодоление недостатков существующего уровня техники.
При решении технической задачи изобретением достигается технический результат, заключающийся в повышении автоматизации процессов обработки и перемещения паллетированных грузов при глубинном хранении за счет расширения функциональных возможностей радиоуправляемого шаттла.
Раскрытие сущности изобретения
Изобретение представляет собой автоматизированную систему высокой плотности хранения, содержащую:
по меньшей мере, один стеллаж с рельсами, расположенными таким образом, что по ним может перемещаться автономная радиоуправляемая тележка-шаттл,
по меньшей мере, одну автономную радиоуправляемую тележку-шаттл, выполненную с возможностью загрузки-выгрузки и перемещению грузов внутри канала стеллажа, свободно передвигаясь под паллетами, стоящими на ложементах стеллажа,
при этом каждая из, по меньшей мере, одной радиоуправляемой тележки-шаттла содержит раму, ходовую часть с колесами и приводом, грузовую платформу с подъемным устройством, устройство передачи информации, контроллер и сенсорное устройство с оптическими датчиками для позиционирования тележки - определения конца и начала коридора,
при этом, согласно изобретению,
каждая, из по меньшей мере, одной радиоуправляемой тележки-шаттла содержит:
блок центрального управления - БЦУ;
блок движения - БДВ;
блок подъемной платформы - БПП;
блок индикации состояний - БИС;
при этом все блоки конструктивно выполнены независимо друг от друга, а функционально все связаны с БЦУ,
БЦУ выполнен с возможностью приема команды, поданной оператором посредством блока дистанционного управления - БДУ, выполняет обработку полученной команды посредством блоков БДВ, БПП, БИС, а после окончания выполнения заданной команды дает обратную связь на БДУ.
БЦУ может состоять из центрального программируемого контроллера, блока питания, автоматических выключателей и двух реле. При этом блок питания преобразует напряжение с аккумуляторной батареи для питания БЦУ, а реле отвечают за функционирование программируемого контроллера с другими блоками шаттла.
Связь с блоками БДВ и БПП может быть осуществлена по открытому коммуникационному протоколу, основанному на архитектуре ведущий-ведомый.
БДВ может быть выполнен с возможностью перемещения шаттла в стеллажной конструкции, состоит из мотора, блока управления мотором, механизма передачи крутящего момента от мотора на колеса шаттла.
БПП может быть выполнен с возможностью поднятия и опускания груза для дальнейшего его перемещения, при этом для ограничения крайних положений подъемной платформы используются датчик верхнего и датчик нижнего положения подъемной платформы, срабатывающие на флажок, установленный на валу подъемного механизма.
Краткое описание сопроводительных фигур
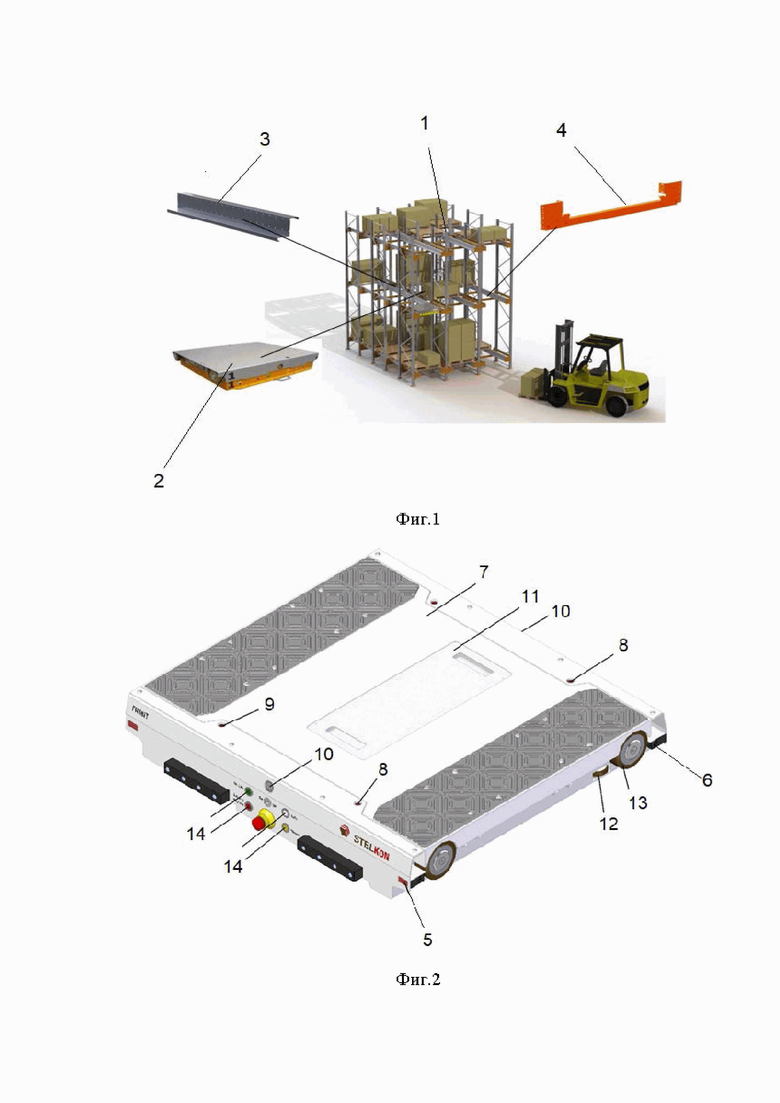
Сущность изобретения может быть дополнительно пояснена неограничивающими примерами конструктивного выполнения автоматизированной системы высокой плотности хранения, отраженными на сопроводительных фигурах 1-3, на которых: фиг.1 - автоматизированная система высокой плотности хранения, общий вид; фиг.2 - автономная радиоуправляемая тележка-шаттл, аксонометрический вид сверху; фиг.3 - то же, аксонометрический вид снизу.
Отдельными позициями обозначены следующие элементы:
1 - стеллаж;
2 - автономная радиоуправляемая тележка-шаттл;
3 - ложемент;
4 - балка с кронштейном;
5 - датчик домашней позиции (начала коридора);
6 - датчик конечной позиции (конца коридора);
7 - подъемная платформа;
8 - датчики наличия паллет;
9 - датчик подсчета паллет;
10 - ультразвуковые датчики дистанции;
11 - крышка аккумулятора;
12 - направляющий ролик;
13 - колесо;
14 - световые индикаторы;
15 - магниты;
16 - датчик ложемента.
Осуществление изобретения
Изобретение представляет собой автоматизированную систему высокой плотности хранения. Данная система содержит: по меньшей мере, один стеллаж 1 с рельсами, расположенными таким образом, что по ним может перемещаться автономная радиоуправляемая тележка-шаттл 2; по меньшей мере, одну автономную радиоуправляемую тележку-шаттл 2, выполненную с возможностью загрузки-выгрузки и перемещению грузов внутри канала стеллажа 1, свободно передвигаясь под паллетами, стоящими на ложементах 3 стеллажа 1.
При этом каждая из, по меньшей мере, одной радиоуправляемой тележки-шаттла 2 содержит раму, ходовую часть с колесами 13 и приводом, грузовую платформу 7 с подъемным устройством, устройство передачи информации, контроллер и сенсорное устройство с оптическими датчиками 5 и 6 для позиционирования тележки - определения конца и начала коридора.
Каждая, из по меньшей мере, одной радиоуправляемой тележки-шаттла 2 содержит:
блок центрального управления - БЦУ;
блок движения - БДВ;
блок подъемной платформы - БПП;
блок индикации состояний - БИС;
при этом все блоки конструктивно выполнены независимо друг от друга, а функционально все связаны с БЦУ.
БЦУ выполнен с возможностью приема команды, поданной оператором посредством блока дистанционного управления - БДУ, выполняет обработку полученной команды посредством блоков БДВ, БПП, БИС, а после окончания выполнения заданной команды дает обратную связь на БДУ.
БЦУ состоит из центрального программируемого контроллера, блока питания, автоматических выключателей и двух реле.
Блок питания преобразует напряжение с аккумуляторной батареи для питания БЦУ, а реле отвечают за функционирование программируемого контроллера с другими блоками шаттла.
Связь с блоками БДВ и БПП осуществлена по открытому коммуникационному протоколу, основанному на архитектуре ведущий-ведомый.
БДВ выполнен с возможностью перемещения тележки-шаттла 2 в стеллажной конструкции 1, состоит из мотора, блока управления мотором, механизма передачи крутящего момента от мотора на колеса 13 шаттла.
БПП выполнен с возможностью поднятия и опускания груза для дальнейшего его перемещения, при этом для ограничения крайних положений подъемной платформы 7 используются датчик верхнего и датчик нижнего положения подъемной платформы, срабатывающие на флажок, установленный на валу подъемного механизма.
Современная система хранения высокой плотности - это технология, которая позволяет автоматизировать и оптимизировать процессы обработки и перемещения паллетированных грузов при глубинном хранении. Данная система обеспечивает лучшую пропускную способность, а также, безопасность и надежность.
При использовании автоматизированной системы высокой плотности хранения стеллаж оснащается дополнительными рельсами, расположенными под каждым уровнем ложементов. По этим рельсам перемещаются автономные радиоуправляемые тележки-шаттлы, которые, выполняя работу за подъемно-транспортную технику и оператора, производят операции по загрузке-выгрузке и перемещению грузов внутри канала стеллажа.
Автономная радиоуправляемая тележка-шаттл изготовлена из нескольких блоков. Благодаря надежному приводному мотору, повышается легкость в управлении и обслуживании. На каждом уровне шаттл очень просто поместить на специальные рельсы. Единое исполнение предотвращает возможность повреждения груза и неудачного складирования.
Важным преимуществом данной системы является то, что она обеспечивает высокую скорость работы склада. Паллета перемещается внутри стеллажа тележкой-шаттлом, скорость движения которой от 0,75 до 1,7 м/с, что в несколько раз выше скорости погрузчика или штабелера внутри стеллажа.
При организации предложенной системы хранения на складах, где на 1000 м2 приходится в среднем один погрузочно-разгрузочный док, минимальная оборачиваемость склада составит от двух до трех общих емкостей склада в месяц. Учитывая, что погрузчик или штабелер не заезжает внутрь стеллажа, резко снижается риск повреждения самих стеллажных конструкций, следовательно, увеличивается срок их эксплуатации, сводится к минимуму процент повреждений грузов. Существенно сокращается при этом и количество необходимой подъемно-транспортной техники и обслуживающего персонала.
Чтобы начать перемещение паллет в стеллаже 1, погрузчик или штабелер, не заезжая внутрь стеллажа, устанавливает тележку-шаттл 2 на рельсы, расположенные в нижней части ложементов 3 так, что тележка-шаттл 2 может свободно передвигаться под паллетами, стоящими на ложементах 3.
Для упрощения установки на тележке-шаттле 2 присутствуют направляющие ролики 12. Направляющие ролики 12 имеют полиуретановое покрытие, что снижает шум при движении тележки-шаттла 2 и защищает ложемент 3 стеллажа 1 от дополнительного износа.
Оператор задает необходимую программу посредством пульта дистанционного управления. Тележка-шаттл 2, следуя программе, въезжает под паллет, приподнимает его, выдвигая вверх грузовую платформу 7, и отвозит их, последовательно загружая свободные места в глубине прохода.
После выполнения заданной команды тележка-шаттл 2 автоматически возвращается в домашнюю позицию для ожидания последующей команды. По окончании загрузки или выгрузки паллет, тележка переставляется на другой ярус.
Позиционирование (распознание начала и конца канала) тележки-шаттла 2, внутри коридора стеллажной системы, осуществляется с помощью оптических датчиков 5 и 6, срабатывающих на конструктивную деталь стеллажа (например, кронштейн PR-U на фиг.1). Это позволяет не устанавливать дополнительные метки или элементы конструкции для работы тележек-шаттлов в системе стеллажей и уменьшает итоговую стоимость стеллажной конструкции.
Обнаружение паллет внутри стеллажа происходит за счет оптических и ультразвуковых датчиков 8 и 10. Оптические датчики 8 используются для точного позиционирования тележки под паллетом перед подъемом платформы 7 и перемещением паллет. Ультразвуковые датчики 10 используются для обнаружения стоящих паллет внутри стеллажа 1. Они позволяют точно выставить расстояние между установленными паллетами в канале и обеспечить необходимую схему хранения товаров. Так же эти датчики 10 при движении постоянно обрабатывают область перед тележкой-шаттлом 2. Если в канале датчик 10 обнаруживает посторонний объект, то движение тележки-шаттла 2 прекращается, что предотвращает повреждения как самой тележки-шаттла, так и объекта.
На лицевой панели тележки-шаттла 2 присутствуют световые индикаторы 14. Каждый световой индикатор 14 сообщает оператору о том или ином состоянии тележки-шаттла. Зеленый индикатор обозначает что тележка-шаттл находится в автоматическом режиме и готова к работе. Красный индикатор сигнализирует о низком заряде аккумуляторной батареи и необходимости ее замены. Белый индикатор обозначает что тележка находится не в канале ложемента и при этом включены удерживающие магниты 15. Желтый индикатор - тележка находится в ручном режиме управления.
Перемещение тележки-шаттла из коридора в коридор производится погрузчиком или штабелером. Для безопасного перемещения тележки-шаттла 1 с помощью погрузочно-разгрузочной техники на днище тележки-шаттла 1 установлены магниты 15, которые автоматически включаются (примагничиваются) к вилам погрузочно-разгрузочной техники и удерживаются во время движения. Это позволяет удержать тележку на вилах при столкновении или экстренной остановке погрузочно-разгрузочной техники.
Для работы тележка-шаттл использует современные литий-железо-фосфатные аккумуляторные батареи. В комплект одной тележки входит два таких аккумулятора, что обеспечивает бесперебойную работу тележки на всем протяжении рабочей смены. Замена аккумулятора в шаттле происходит через быстросъемную крышку 11. Для снятия крышки не требуются никакого инструмента, поскольку крышка 11 крепится за счет быстрых штыревых замков с неодимовыми магнитами.
Благодаря конструктивным особенностям тележки-шаттла изобретению присущ расширенный функционал.
Так через пульт дистанционного управления возможно осуществление следующего списка доступных команд.
Поиск домашней позиции.
При загрузке тележки-шаттла 2 в ложемент 3 происходит поиск домашней позиции по датчику 5. По завершению данной функции шаттл готов к работе с пульта управления.
Загрузка паллета.
Тележка-шаттл 2 позиционируется под паллетом по датчикам наличия паллета 8, после успешного позиционирования происходит подъем платформы 7. Шаттл перемещает паллет в зону загрузки, платформа 7 опускается, шаттл 2 отправляется в домашнюю позицию по датчику 5 и остается в режиме ожидания следующего паллета.
Выгрузка паллета.
При отсутствии паллета в домашней позиции тележка-шаттл 2 перемещается до ближайшего паллета в зоне загрузки по датчику 8. Обнаружение происходит по датчикам наличия паллета 8, далее шаттл 2 позиционируется под паллетом, после успешного позиционирования платформа 7 поднимается, шаттл 2 перемещается в зону выгрузки по датчику 5. При достижении домашней позиции платформа 7 с грузом опускается.
Уплотнение в конец.
Тележка-шаттл 2 перемещается в поиске пустого пространства по датчику 8. Обнаружив свободную зону, шаттл 2 возвращается под ближайший паллет, далее позиционируется под ним по датчикам 8 и 9, происходит подъем платформы 7, шаттл 2 перемещает его в зону загрузки по датчику 10 или 6, платформа 7 опускается и шаттл 2 возвращается за следующим паллетом. Цикл завершается, когда все паллеты перемещены из зоны выгрузки в зону загрузки.
Уплотнение в дом.
При отсутствии паллета в домашней позиции тележка-шаттл 2 перемещается до ближайшего паллета в зоне загрузки. Обнаружение происходит по датчикам наличия паллета 8 и 9, далее шаттл 2 позиционируется под паллетом, после успешного позиционирования платформа 7 поднимается, шаттл 2 перемещается в зону выгрузки. При достижении домашней позиции по датчикам 10 или 5 платформа с грузом опускается, далее шаттл перемещается за следующим паллетом. Цикл завершается, когда все паллеты перемещены из зоны загрузки в зону выгрузки, далее шаттл возвращается в домашнюю позицию.
Автоматическая выгрузка в конец.
Тележка-шаттл 2 перемещается в поиске пустого пространства по датчику 8. Обнаружив свободную зону, шаттл 2 возвращается под ближайший паллет, далее позиционируется под ним по датчикам 8 и 9, происходит подъем платформы 7, шаттл 2 перемещает его в зону загрузки по датчику 6, платформа 7 опускается и шаттл 2 возвращается за следующим паллетом. Шаттл 2 перемещается со вторым паллетом в зону загрузки по датчику 10 и ожидает до тех пор, пока не будет забран первый паллет. После забора первого паллета, шаттл 2 перемещает второй паллет в конечную позицию по датчику 6 и возвращается за следующим паллетом. Цикл завершается, когда все паллеты перемещены из зоны выгрузки в зону загрузки. Шаттл 2 возвращается в домашнюю позицию по датчику 5.
Автоматическая выгрузка в дом.
При отсутствии паллета в домашней позиции тележка-шаттл 2 перемещается до ближайшего паллета в зоне загрузки. Обнаружение происходит по датчикам наличия паллета 8 и 9, далее шаттл 2 позиционируется под паллетом, после успешного позиционирования платформа 7 поднимается, шаттл 2 перемещается в зону выгрузки по датчику 5. При достижении домашней позиции платформа 7 с грузом опускается, шаттл 2 возвращается за следующим паллетом. Шаттл 2 перемещается с вторым паллетом в зону выгрузки по датчику 10 и ожидает до тех пор, пока не будет забран первый паллет. После забора первого паллета, шаттл 2 перемещает второй паллет в домашнюю позиции по датчику 5 и возвращается за следующим паллетом. Цикл завершается, когда все паллеты перемещены из зоны загрузки в зону выгрузки.
Подсчет паллетов.
Тележка-шаттл 2 перемещается из домашней позиции до конца ложемента 3, происходит подсчет паллетов по датчику 9, далее шаттл 2 возвращается в домашнюю позицию по датчику 5.
Функционально шаттл разбивается на несколько основных блоков:
1) блок центрального управления (шкаф управления), далее БЦУ;
2) блок дистанционного управления оператора, далее БДУ;
3) блок движения, далее БДВ;
4) блок подъемной платформы (груза), далее БПП;
5) блок индикации состояний, далее БИС.
Все блоки конструктивно физически независимы друг от друга. Функционально все блоки завязаны на БЦУ. Каждый блок отвечает за свою операцию в процессе выполнения команды.
БЦУ отвечает за прием команды от БДУ поданной оператором, обработку команды, обеспечивает выполнение команды посредством блоков БДВ, БПП, БИС, а после окончания выполнения заданной команды дает обратную связь на БДУ.
БЦУ состоит из центрального программируемого контроллера, блока питания DC, автоматических выключателей FX и реле K, А. Блок питания DC преобразует напряжение с аккумуляторной батареи для питания БЦУ. Реле К и А отвечают за функционирование программируемого контроллера с другими блоками шаттла. При включении питания и загрузки центрального программируемого контроллера происходит опрос состояния датчиков 17 наличия ложемента и ультразвуковых датчиков наличия паллет 8. В зависимости от их состояния программа шаттла 2 входит в автоматический режим готовности к работе или переходит в ручной режим до получения дальнейших команд от БДУ.
Все датчики подключены к БЦУ кабелями, кабели служат одновременно как для подачи питания для датчиков, так и для передачи состояния датчика в программируемый контролер. Связь с блоками БДВ и БПП происходи, например, по протоколу Modbus. Modbus - открытый коммуникационный протокол, основанный на архитектуре ведущий-ведомый, широко применяется в промышленности для организации связи между электронными устройствами. Для связи с блоком БДУ используется радиосигнал на промышленной частоте 433 МГц.
Блок БДУ состоит из дистанционного пульта управления и приемника. Этот блок позволяет оператору управлять устройством посредством подачи заданных команд в БЦУ.
БДВ осуществляет перемещение шаттла в стеллажной конструкции. Состоит из мотора, блока управления мотором, механизма передачи крутящего момента от мотора на колеса шаттла.
БПП поднимает и опускает груз для дальнейшего его перемещения. Для ограничения верхнего и нижнего положения подъемной платформы используются два датчика: датчик верхнего и датчик нижнего положения подъемной платформы. Датчики срабатывают на флажок, установленный на валу подъемного механизма.
БИС служит для визуальной подачи состояния шаттла и выполняемых команд.
Пример функциональной связи блоков на примере команды «Загрузка паллет»:
- БДУ подает команду на выполнение. БЦУ опрашивает состояния датчиков;
- Если состояние датчиков соответствует возможности начала выполнения команды, то БЦУ дает команду БДВ на начало движения;
- БДВ работает до подачи с БЦУ команды на остановку движения. БЦУ производит опрос датчиков. Когда условия состояния датчиков будут советовать положению шаттла ровно под паллетом в канале стеллажа БЦУ подаст команду на остановку БДВ;
- БДВ прекращает работу;
- Если состояние датчиков советует возможности к началу выполнения команды на подъем платформы, то БЦУ дает команду БПП на начало работы;
- БПП осуществляет подъем платформы;
- После окончания работы БПП БЦУ дает команду БДВ на движение шаттла к домашней позиции;
- БДВ работает пока шаттл не встанет в домашнюю позицию. Команду на остановку движения дает БЦУ после опроса состояния датчика домашней позиции;
- Далее БПП опускает поддон с продукцией на ложемент;
- БЦУ заканчивает выполнение команды, дает сигнал об окончании БДУ и переходит в режим ожидания новой команды.
Датчики
Датчики домашней (конечной) позиции. Дачники служат для определения длинны канала стеллажа, зоны загрузки и выгрузки паллет. Датчики имеют две дистанции срабатывания, которые обозначают точку остановки в домашней (конечной) позиции и зону домашней (конечной) в которой шаттл движется с медленной скоростью перед полной остановкой. При установке шаттла в канал стеллажа, если соблюдены условия готовности к работе в автоматическом режиме БЦУ проводит опрос датчика домашней позиции. В зависимости от состояния датчика БЦУ дает команду БДВ на движение до точки остановки в домашней (конечной) позиции. Все команды автоматического режима начинаются только при условии, что шаттл находится в домашней позиции.
Датчик наличия паллет. Датчики наличия паллет служат для распознания расположенных паллет с грузом внутри канала стеллажа. При движении шаттла датчики обнаруживают стоящий паллет в канале. Шаттл позиционируется под паллетом и передает сигнал на БДВ и БПП.
Датчик подсчета паллет. Используется в команде «подсчет паллет (инвентаризация)». Служит для передачи в БЦУ сигнала о количестве установленных паллет в канале стеллажа.
Ультразвуковой датчик дистанции. Позволяет контролировать дистанцию между паллетами при установе паллет в канал. Датчики имеют две дистанции срабатывания дальнюю и ближнюю. БЦУ при получении сигнала дальней дистанции предает на БДВ команду на снижение скорости передвижения, а при получении сигнала с ближней дистанции дает сигнал полной остановки шаттла. Дальность срабатывания датчика настраивается в зависимости от характера и габарита груза, расположенного на паллете.
Датчик ложемента. Служит для распознания ложемента канала, когда шаттл устанавливают в канал стеллажа. Необходим как элемент безопасности для предотвращения возможности начала работы шаттла пока он находится вне стеллажной конструкции. А также служит одним из сигналов для включения электромагнитов 15.
Датчик угла поворота (Энкодер). Датчик устанавливается на валу прикрепленному к мотору движения. Он предает в БЦУ информацию о количестве оборотов двигателя. А БЦУ конвертирует эти данные в метрические единицы и использует для работы автоматических команд шаттла.
Все датчики подключены кабельными соединениями к БЦУ. Сигналы с датчиков поступают непосредственно на входы контроллера управления. Что обеспечивает надежность передачи сигнала и исключает его потерю.
Дополнительные функциональные преимущества изобретения.
Ролики снимают статическое электричество. Оптический датчик для осуществления подсчета паллет ускоряет и упрощает инвентаризацию, реализована функция выбора типа паллета в зависимости от количества нижних досок. Установлены лазерные датчики обнаружения домашней и конечной зоны, что позволяют шаттлу позиционироваться в домашней позиции и избежать столкновения в конечной зоне. Установлен датчик обнаружения рабочей зоны. При отсутствии сигнала от данного датчика, у шаттла блокируется выполнения автоматических команд.
Установлены индуктивные датчики верхнего и нижнего положения платформы, которые позволяют избежать аварийных ситуаций во время подъема платформы, а также деформации корпуса шаттла и подъемного механизма.
Ультразвуковые датчики также применяются для установки безопасного расстояния между первым и вторым, последним и предпоследним грузом.
Индикационные лампы: желтая индикация (горит - шаттл управляется в ручном режиме; мигает - наличие аварий или ошибок); красная индикация (мигает - разряд аккумуляторной батареи); зеленая индикация (горит - шаттл готов к выполнению автоматических функций; мигает - шаттл выполняет автоматическую функцию); белая индикация (горит - магниты включены).
Реализована функция ручного управления шаттлом.
Разработан человеко-машинный интерфейс для управления шаттлом с персонального компьютера.
Установлен энкодер на моторе перемещения, что обеспечивает безопасность перемещения шаттла при выходе датчиков из строя.
Реализована функция подсчета моточасов работы шаттла путем программного обеспечения логического контроллера.
Установлено воздушное охлаждение на шкаф с электронными компонентами, что позволяет избежать перегрева электронных компонентов и выхода из строя электронных компонентов.
Для работы при отрицательных температурах предусмотрена возможность установки системы подогрева центрального блока управления (шкаф управления).
Предложенная автоматизированная система высокой плотности хранения позволяет расширить функциональные возможности радиоуправляемого шаттла, в свою очередь повысив автоматизацию процессов обработки и перемещения паллетированных грузов при глубинном хранении.
Поиск по общедоступным источникам информации показал, что из уровня техники не известна и явным образом не следует вся совокупность признаков предложенного изобретения, в связи с чем изобретение соответствует условиям патентоспособности «новизна» и «изобретательский уровень».
Заявленное изобретение состоит из стандартных для этой области техники материалов и элементов, взаимосвязанных определенным образом, то есть может быть использовано в промышленности, ввиду чего изобретение соответствует условию патентоспособности «промышленная применимость».
Следует понимать, что после рассмотрения специалистом приведенного описания с примером осуществления предлагаемого изобретения, для него станут очевидными другие изменения, модификации и варианты реализации изобретения. Таким образом, все подобные изменения, модификации и варианты реализации, а также другие области применения, не имеющие расхождений с сущностью настоящего изобретения, следует считать защищенными настоящим изобретением в объеме прилагаемой формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ПЕРЕМЕЩЕНИЯ ПРОДУКЦИИ ПОДВЕСНОГО РАЗМЕЩЕНИЯ | 2024 |
|
RU2841086C1 |
| Устройство для укладки паллеты | 2018 |
|
RU2785653C2 |
| МОДУЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПАЛЛЕТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 2021 |
|
RU2783555C1 |
| МНОГОЯРУСНАЯ АВТОМАТИЗИРОВАННАЯ АВТОСТОЯНКА МОДУЛЬНОГО ТИПА | 2008 |
|
RU2376430C1 |
| САМОХОДНАЯ БУФЕРНАЯ ПЛАТФОРМА | 2011 |
|
RU2477692C1 |
| ХРАНИЛИЩЕ (ВАРИАНТЫ) | 2010 |
|
RU2427692C1 |
| АВТОМАТИЗИРОВАННАЯ УСТАНОВКА КОМПЛЕКТОВАНИЯ ЗАКАЗОВ | 2023 |
|
RU2833263C2 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| КОЛЕСО ДЛЯ ПАЛЛЕТА | 2015 |
|
RU2603299C1 |
| Способ оснащения воздушных судов авиационными средствами поражения | 2022 |
|
RU2808134C1 |

Изобретение относится к системам хранения высокой плотности. Автоматизированная система высокой плотности хранения содержит по меньшей мере один стеллаж с рельсами и по меньшей мере одну автономную радиоуправляемую тележку-шаттл. Тележка-шаттл выполнена с возможностью загрузки-выгрузки и перемещения грузов внутри канала стеллажа, свободно передвигаясь под паллетами, стоящими на ложементах стеллажа. Каждая из по меньшей мере одной радиоуправляемой тележки-шаттла содержит раму, ходовую часть с колесами и приводом, грузовую платформу с подъемным устройством, устройство передачи информации, контроллер и сенсорное устройство с оптическими датчиками для позиционирования, блок центрального управления, блок движения, блок подъемной платформы, блок индикации состояний. Все блоки конструктивно выполнены независимо друг от друга, а функционально связаны с блоком центрального управления. Блок центрального управления выполнен с возможностью приема команды, поданной оператором посредством блока дистанционного управления, обработки полученной команды посредством блоков, а после окончания выполнения заданной команды дает обратную связь на блок дистанционного управления. Достигается повышение автоматизации процессов обработки и перемещения паллетированных грузов при глубинном хранении. 5 з.п. ф-лы, 3 ил.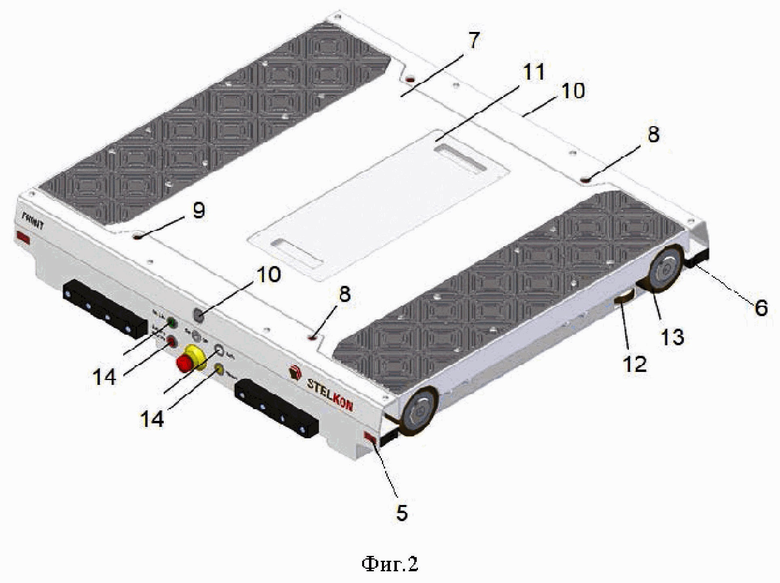
1. Автоматизированная система высокой плотности хранения, содержащая:
по меньшей мере, один стеллаж с рельсами, расположенными таким образом, что по ним может перемещаться автономная радиоуправляемая тележка-шаттл,
по меньшей мере, одну автономную радиоуправляемую тележку-шаттл, выполненную с возможностью загрузки-выгрузки и перемещения грузов внутри канала стеллажа, свободно передвигаясь под паллетами, стоящими на ложементах стеллажа,
при этом каждая из, по меньшей мере, одной радиоуправляемой тележки-шаттла содержит раму, ходовую часть с колесами и приводом, грузовую платформу с подъемным устройством, устройство передачи информации, контроллер и сенсорное устройство с оптическими датчиками для позиционирования тележки – определения конца и начала коридора,
отличающаяся тем, что
каждая из, по меньшей мере, одной радиоуправляемой тележки-шаттла содержит:
блок центрального управления – БЦУ;
блок движения – БДВ;
блок подъемной платформы – БПП;
блок индикации состояний – БИС;
при этом все блоки конструктивно выполнены независимо друг от друга, а функционально все связаны с БЦУ,
БЦУ выполнен с возможностью приема команды, поданной оператором посредством блока дистанционного управления – БДУ, выполняет обработку полученной команды посредством блоков БДВ, БПП, БИС, а после окончания выполнения заданной команды дает обратную связь на БДУ.
2. Автоматизированная система высокой плотности хранения по п.1, отличающаяся тем, что БЦУ состоит из центрального программируемого контроллера, блока питания, автоматических выключателей и двух реле.
3. Автоматизированная система высокой плотности хранения по п.2, отличающаяся тем, что блок питания преобразует напряжение с аккумуляторной батареи для питания БЦУ, а реле отвечают за функционирование программируемого контроллера с другими блоками шаттла.
4. Автоматизированная система высокой плотности хранения по любому из пп.1 или 2, отличающаяся тем, что связь с блоками БДВ и БПП осуществлена по открытому коммуникационному протоколу, основанному на архитектуре ведущий-ведомый.
5. Автоматизированная система высокой плотности хранения по п.1, отличающаяся тем, что БДВ выполнен с возможностью перемещения тележки-шаттла в стеллажной конструкции, состоит из мотора, блока управления мотором, механизма передачи крутящего момента от мотора на колеса шаттла.
6. Автоматизированная система высокой плотности хранения по п.1, отличающаяся тем, что БПП выполнен с возможностью поднятия и опускания груза для дальнейшего его перемещения, при этом для ограничения крайних положений подъемной платформы используются датчик верхнего и датчик нижнего положения подъемной платформы, срабатывающие на флажок, установленный на валу подъемного механизма.
| WO 2015131924 A1, 11.09.2015 | |||
| Устройство для испытания коммутационных аппаратов высокого напряжения на отключающую способность | 1959 |
|
SU133523A1 |
| Стеклопак | |||
| Самые современные складские решения | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| US 11370615 B2, 28.06.2022 | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |

