Изобретение относится к области автоматизации и механизации при складировании и хранении штучных грузов на паллетах на производственных площадках, соответственно, складах, терминальной обработки грузов на торговых предприятиях.
Прием поступающих автомобильным, железнодорожным и водным транспортом внешних грузов, их обработка, доставка и распределение основаны на комплексном использовании для этих целей технологического оборудования по автоматизации и механизации складирования и хранения штучных грузов с использованием комплекса оборудования паллетирования груза, что позволяет максимально увеличить плотность загрузки используемых производственных помещений.
Комплексы паллетирования штучных грузов содержат конвейер для загрузки внешних штучных грузов, оборудование для разгрузки паллетированной продукции, накопитель для размещения прокладочных материалов, управляемое устройство с рабочими схватами зоны позиционирования груза и прокладочного материала, радиус действия рабочих схватов позиционирован на перемещение прокладочного материала из накопителя на оборудование для разгрузки продукции, с конвейера загрузки на прокладочный материал разгрузки паллетированной продукции, (см патенты RU №2125954, публ. 10.02.1999 г., №21300410, публ. 20.05. 1999 г.).
Комплекс паллетирования штучных грузов (см. патент RU №2125954- выбран в качестве ближайшего аналога заявляемого полезной модели) содержит оборудование в виде конвейера для зоны загрузки штучных грузов, оборудование для зоны разгрузки паллетированной продукции, накопитель для зоны размещения прокладочных материалов, управляемое устройство с рабочими схватами для зоны позиционирования груза и паллетов, радиус действия рабочей зоны схватов позиционирован на перемещение прокладочных материалов из накопителя на оборудование зоны разгрузки продукции, с конвейера зоны загрузки на прокладочный материал.
В данном техническом решении управляемое устройство с рабочими схватами выполнено в виде ротора с вертикальной осью вращения и соосными копиром и кулачком, кинематически связанными с толкателями для вертикального и горизонтального перемещения рабочих схватов размещенных на продольно ориентированной штанге, при этом конвейер зоны загрузки штучных грузов, оборудование для зоны разгрузки паллетированной продукции расположены последовательно с ориентацией их продольных осей в общей продольно-вертикальной плоскости, проходящей через вертикальную ось поворота ротора.
Данный комплекс разработан для конкретного изделия и работает только в заданной технологической зоне, без возможности передислокации или смены продукции. Названные конструктивные особенности комплекса паллетирования штучных грузов имеют значительные габариты, что технологически ограничивает возможности его эксплуатации в условиях ограниченного пространства производственных площадей и в разных их зонах по месторасположению штучных грузов, подлежащих паллетированию, а также в условиях паллетирования грузов на производственных площадках различных территорий.
Используемый в данном техническом решении управляемое устройство с рабочими схватами для позиционирования груза и паллетов имеет низкую скорость перемещения штучного груза из зоны загрузки в зону разгрузки паллетированной продукции, что снижает производительность процесса.
Используемое в известном техническом решении конструктивное решение по размещению рабочих схватов на продольно ориентированной штанге снижает уровень безопасности вне зоны размещения конвейеров при перегрузке груза из зоны загрузки в зону разгрузки паллетируемой продукции.
При анализе известного уровня техники также установлено, что в настоящее время наиболее энергоэффективными по возможностям быстрого паллетирования груза являются устройства с рабочими схватами на основе промышленных роботов-манипуляторов, оснащенных различным программным обеспечением для управления поворотом основания - опоры, стрелы, рукояти, рабочих схватов. Роботы-манипуляторы используют в составе конвейерных линий, что улучшает качество функционирования и производительность различных технологических процессов, в том числе, при паллетировании продукции, при этом важным преимуществом промышленных роботов-манипуляторов является возможность их использования для различных типов паллетируемой продукции путем перенастройки рабочих схватов на вакуумные, вилочные, зажимные, магнитные, комбинированные (см., например, статью Роботы KUKA для производства, их типы и возможности, информация от 01.11.2021 г.).
Техническая задача, на решение которой направлено изобретение, заключается в расширении технологических возможностей паллетирования штучных грузов на ограниченных по площади производственных территориях, на производственных площадях с различными зонами размещения грузов, подлежащих паллетированию, и в условиях использования модульного роботизированного комплекса паллетирования на производственных площадках различных территорий с одновременным повышением производительности и технологической безопасности.
Для решения поставленной технической задачи предлагается модульный роботизированный комплекс паллетирования штучных грузов, содержащий оборудование в виде конвейера для зоны загрузки штучных грузов, оборудование для зоны разгрузки паллетированной продукции, накопитель для зоны размещения прокладочных материалов, управляемое устройство с рабочими схватами для зоны позиционирования груза и паллетов, радиус действия рабочей зоны схватов позиционирован на перемещение прокладочных материалов из накопителя на оборудование зоны разгрузки продукции, с конвейера зоны загрузки на прокладочный материал зоны разгрузки, согласно изобретения, роботизированный комплекс выполнен на основе мобильных модулей, имеющих возможность транспортирования и стыковки, каждый модуль имеет днище для контакта его с поверхностью производственной площади и для монтажа оборудования соответствующей зоны комплекса, по периметру днища каждого модуля установлено съемное относительно него ограждение на основе последовательно расположенных с каждой стороны днища разъемно соединяемых между собой панелей, в модуле зоны позиционирования использовано устройство с рабочими схватами на основе промышленного робота-манипулятора, днище данного модуля с возможностью фиксации состыковано с днищами соседних модулей и последних между собой со стороны демонтированных на них панелей ограждения и с образованием по внешнему периметру комплекса ограждения с открытыми зонами для подачи груза в модуль зоны загрузки груза и вывода паллетируемой продукции из модуля зоны разгрузки паллетированной продукции
Согласно изобретения, боковины днищ модулей имеют прорези для вилочного погрузчика, обеспечивающего транспортирование модуля в зону установки его на опорную поверхность производственной площади.
Согласно изобретения, в качестве робота -манипулятора используют робот ABB IRB 460, имеющий возможность перенастройки схвата на захват для мешков, захват вакуумный, захват зажимной с нижней поддержкой, захват зажимной, 2-х секционный, с нижней поддержкой.
Согласно изобретения, в управляющем программном обеспечении модульного роботизированного комплекса паллетирования штучных грузов использован графический интерфейс для оптимизации радиуса действия рабочей зоны робота относительно зон расположения оборудования модулей комплекса.
Согласно изобретения, модульный роботизированный комплекс паллетирования снабжен упаковщиком продукции на паллетах на основе паллетообмотчика.
Согласно изобретения, внутренний контур панелей ограждения модулей выполнен из светопрозрачного материала или сетчатым, или решетчатым.
Согласно изобретения, зона вывода паллетируемой продукции комплекса снабжена световым барьером на основе световой завесы (Light Curtain) для защиты обслуживающего персонала, доступа в опасные зоны или многолучевого светового барьера (Light Grid) для защиты доступа в опасные зоны.
Согласно изобретения, в качестве опорной поверхности для установки днищ модулей используют платформы полуприцепов автомобильного транспорта или платформы контейнеров для транспортировки железнодорожным или водным транспортом для транспортировании их в рабочие пространства производственных помещений на различных территориях.
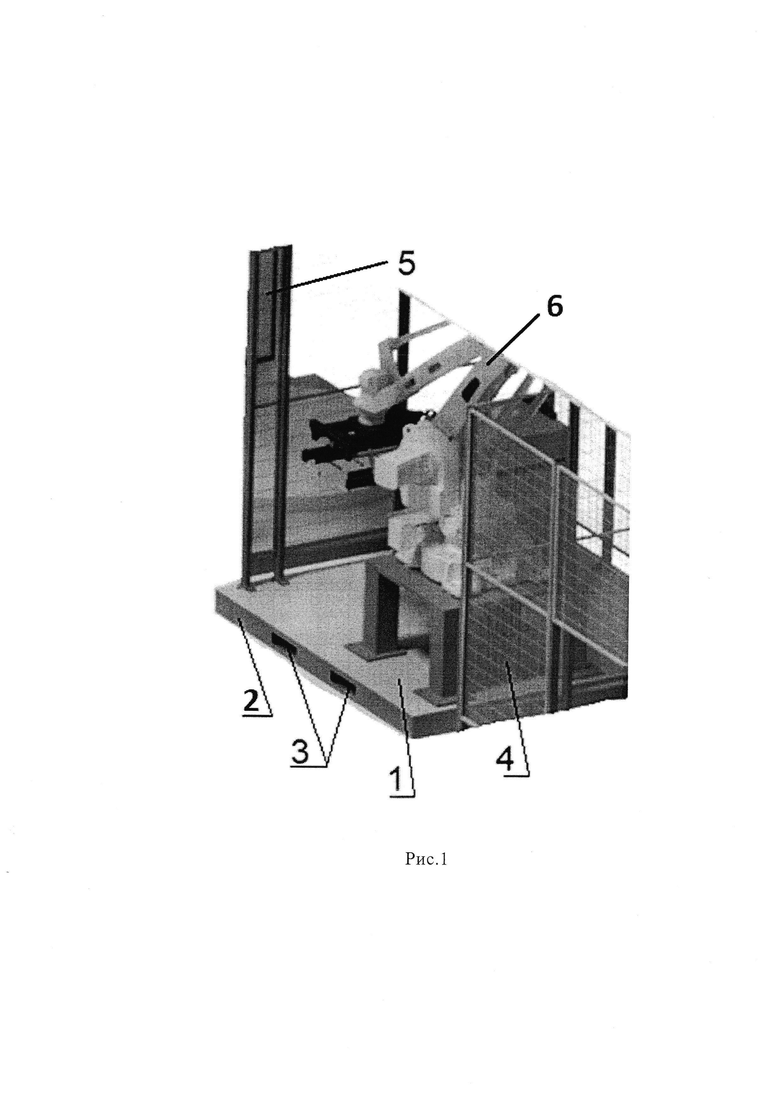
При реализации изобретения обеспечивается создание компактно монтируемого роботизированного комплекса паллетирования штучных грузов из мобильных модулей, оснащенных высокотехнологическим оборудованием по производительности, эксплуатационной надежности и безопасности в производственных помещений с учетом расположения внешних штучных грузов, подлежащих паллетированию, в условиях работы комплекса в ограниченном пространстве склада и/или хранения продукции, при использовании комплекса на различных территориях, что расширяет технологические возможности эксплуатации комплекса с одновременным обеспечением производительности и безопасности.. Изобретение поясняется графическими материалами, где на: Рис. 1 показан фрагмент модуля позиционирования с роботом -манипулятором;
Рис. 2-4 примеры расположения модулей в модульном роботизированном комплексе паллетирования штучных грузов
Рис. 5 - показано пример транспортирования модулей роботизированного комплекса паллетирования штучных грузов на грузовой платформе автотранспортного средства.
Модульный роботизированный комплекс паллетирования штучных грузов содержит оборудование в виде конвейера для зоны загрузки штучных грузов, оборудование для зоны разгрузки паллетированной продукции, накопитель для зоны размещения прокладочных материалов, управляемое устройство с рабочими схватами для зоны позиционирования груза и паллетов, радиус действия рабочей зоны схватов позиционирован на перемещение прокладочных материалов из накопителя на оборудование разгрузки продукции, с конвейера загрузки на прокладочный материал.
Модульный роботизированный комплекс паллетирования штучных грузов образован на основе мобильных модулей, имеющих возможность транспортирования и формирования комплекса паллетирования при стыковке их между собой на рабочей опорной поверхности производственной площади.
Каждый модуль имеет днище 1, нижняя поверхность которого контактирует с опорной поверхностью производственной площади, верхнюю поверхность используют для монтажа технологического оборудования соответствующих зон комплекса. Поверхности днища соединены между собой боковинами 2, в которых выполнены прорези 3 для вилочного погрузчика (не показан), обеспечивающего транспортирование модуля в зону установки его на опорную поверхность в наиболее оптимальные зоны рабочего пространства производственных помещений по складированию и хранению груза с ограниченным рабочим пространством с находящимися на данной территории товарного груза, подлежащего паллетированию, что особенно характерно для территорий магазинов. Возможность транспортирования модулей может быть обеспечена и другими техническими средствами, например, крановым оборудованием.
По периметру днища 1 каждого модуля установлено ограждение 4 из последовательно расположенных с каждой стороны днища вертикально ориентированных панелей 5. Панели 5 съемно соединены с днищем и разъемно между собой. Предпочтительно, каждая панель 5 образована в виде рамок, внутренний контур которых выполнен из светопрозрачного материала или в виде сетки, или в виде решетки. Для обеспечения съемности панелей 5 относительно днища 1 и разъема панелей используют традиционные быстроразъемные соединения, например, соединение «шип-паз», охватывающие стойки рамок хомуты со средствами фиксации (не показано).
Наличие ограждения по периметру каждого мобильного модуля обеспечивает защищенность их оборудования при внешних силовых воздействиях, а также создание по периметру формируемого комплекса палетирования ограждения, обеспечивающего безопасность работы для обслуживающего персонала.
Модульный роботизированный комплекс паллетирования образован на технологически заданной производственной площади путем транспортирования модулей со стыковкой их по боковинам днищ, при этом днища модуля позиционирования состыкованы с днищами соседних модулей и последних между собой со стороны демонтированных панелей 5 ограждения с образованием по внешнему периметру комплекса ограждения открытых зон со стороны подачи внешнего груза в модуль загрузки и зоны вывода паллетируемой продукции из модуля ее разгрузки. Стыковка днищ модулей осуществляется с возможностью их фиксации. Используют традиционно известные средства фиксации, например, выполненные по периметру днищ отверстия с размещением в них U-скоб (не показано).
На верхней поверхности днища мобильного модуля зоны загрузки штучных грузов, предпочтительно используют конвейер. В качестве оборудования для модуля зоны разгрузки паллетированной продукции в зависимости от технологических требований к паллетированию продукции используют конвейер либо поворотный круг (см. рис. 2-4).
В качестве конвейеров используют традиционно известные пассивные конвейеры роликового типа или активные с конвейерной лентой для подачи продукции или перемещения собранных паллет.
Особое значение для создания модульного роботизированного комплекса паллетирования имеет выбор оптимального по габаритам, радиусу действия рабочей зоны и производительности оборудования со схватами для модуля зоны позиционирования, использование которого в комплексе паллетирования в условиях ограниченного пространства требует обеспечения особых условий безопасности работ.
С учетом этих обстоятельств в модуле зоны позиционирования груза и паллетов в качестве устройства с рабочими схватами используют промышленный робот-манипулятор 6 (рис. 1). Предпочтительно, используют робот ABB IRB 460. Робот IRB 460 является быстрым роботом паллетайзером, способным значительно сократить временя цикла и повысить производительность процессов на этапах паллетирования и укладки (см. https://new.abb.com/ products/ robotics/ ru).
Радиус рабочей зоны робота 2,4 м и грузоподъемностью ПО кг, этот компактный, четырех осевой робот может выполнять до 2190 циклов в час с грузом 60 кг. Конструкция робота имеет высокую надежность и жесткость, что обеспечивает высокую работоспособность и низкие эксплуатационные расходы. IRB 460 имеет интегрированный в корпус пакет кабельной разводки, что позволяет продлить его ресурс и значительно уменьшает износ. Шкаф с системой управления ABB IRC5 робота, предпочтительно устанавливают на днище модуля позиционирования. Контроллер IRC5 системы управления робота автоматически:
оптимизирует время цикла (QuickMove), самооптимизирующаяся характеристика управлением движением, которая сводит к минимуму время цикла путем обеспечения максимального ускорения на каждом этапе;
обеспечивает высокую точность пути (TrueMove) - время цикла роботов ABB.
Благодаря технология IRC5 ABB, движение робота предсказуемо и его производительность максимальна. Контроллер ABB совместим с различными типами напряжений и может настраивать обширный спектр внешних условий. IRC5 взаимодействует с другим оборудованием в производстве безопасным образом. Все системы робота ABB запрограммированы с RAPID™ - гибкий, высокоуровневый язык программирования ABB. Все основные характеристики и функциональное управление в RAPID просты в использовании.
Рабочие схваты робота- манипулятора могут быть перенастроены на взаимодействие с различным типом штучных грузов с использованием для этих целей захвата для мешков, захвата вакуумного, захвата зажимного с нижней поддержкой, захвата зажимного, 2-х секционного, с нижней поддержкой.
Использование модульного роботизированного комплекса паллетирования на производственных площадях с различным местоположением подлежащего паллетированию штучного груза и последующей разгрузки паллетированной продукции потребовало наличия в программном обеспечении графического интерфейса, использование которого позволяет оптимизировать радиус действия рабочей зоны робота с обеспечением его производительности относительно зон расположения оборудования модулей комплекса и с учетом образования по внешнему периметру комплекса ограждения с открытыми зонами для подачи внешнего груза в модуль загрузки и вывода паллетируемой продукции из модуля ее разгрузки.
Примеры комплексов паллетирования с образованными по их внешнему периметру ограждений, имеющих открытые зоны для подачи внешнего груза в модуль зоны загрузки и вывода паллетируемой продукции из модуля зоны разгрузки относительно модуля зоны позиционирования при стыковке его днища с днищами других модулей проиллюстрированы на рис. 2, 3, 4 где:
поз.7 показано образованное по внешнему периметру ограждение комплекса паллетирования с использованием панелей с внутренним сетчатым контуром, что обеспечивает зрительное наблюдение за работой оборудования комплекса;
поз.8 показано направление подачи в открытую зону ограждения внешних штучных грузов в модуль зоны загрузки;
поз.9 показано направление выдачи из открытой зоны ограждения паллетированных грузов из модуля зоны паллетирования;
поз.10 показано направление подачи поддонов в накопитель;
поз.11 показано расположение в комплексе паллетирования накопителя поддонов.
На рис. 4 показан пример комплекса паллетирования с оборудованием для модуля упаковки (поз.12). Модуль упаковки имеет, например, оборудование для обмотки стрейч-пленкой паллет с продукцией. В качестве данного оборудования может быть использован паллетообмотчик SIAT OneWrap/SW2 (см. antaiis-packaging/ru/ palletoupakovshhiki/ palletoobmotchik-siat-onewrap/sw2) или Robopac Rotowrap (https://master-kleit.ru/origami/upakovshhik-pallet-v-plenku). Промышленный роботизированный паллетообмотчик с возможностью обмотки паллет обладает интерфейсом на базе HTML5 для связи с любого устройства, независимо от операционной системы.
Для обеспечения безопасности работы на панелях ограждении внешнего периметра в зоне вывода паллетируемой продукции комплекса установлен световой барьер 13 на основе световой завесы (Light Curtain) для защиты обслуживающего персонала, доступа в опасные зоны или многолучевой световой барьер (Light Grid).
Благодаря выполнению роботизированного комплекса паллетирования из мобильных модулей для зон загрузки, зон накопления, оборудования зоны позиционирования, вывода продукции из зоны паллетирования, обеспечивается возможность использования комплекса паллетирования на производственных площадях различных территорий путем транспортирования модулей комплекса, например, на платформе полуприцепа 14 автотранспортного средства, в контейнерах железнодорожного или водного транспорта (см рис. 5).
Таким образом, модульный роботизированный комплекс паллетирования штучных грузов реализует процесс паллетирования для различных грузов при высокой производительности и безопасности и с возможностью работы комплекса на ограниченных по площади производственных территориях, на производственных площадях с различными зонами размещения грузов, подлежащих паллетированию, и в условиях использования комплекса паллетирования производственных площадках различных территорий.




Изобретение относится к области складирования и хранения штучных грузов на паллетах. Модульный роботизированный комплекс паллетирования штучных грузов содержит конвейер для зоны загрузки, оборудование для зоны разгрузки, накопитель для зоны размещения прокладочных материалов, управляемое устройство с рабочими схватами для зоны позиционирования груза и паллетов. Радиус действия рабочей зоны схватов позиционирован на перемещение прокладочных материалов из накопителя на зону разгрузки, с зоны загрузки на прокладочный материал зоны разгрузки. Комплекс выполнен на основе мобильных модулей, имеющих возможность транспортирования и стыковки. Каждый модуль имеет днище для контакта его с поверхностью производственной площади и для монтажа оборудования соответствующей зоны комплекса. По периметру днища каждого модуля установлено съемное ограждение. В модуле зоны позиционирования использовано устройство с рабочими схватами на основе промышленного робота-манипулятора. Днище данного модуля с возможностью фиксации состыковано с днищами соседних модулей с образованием по внешнему периметру ограждения с открытыми зонами для подачи груза в модуль зоны загрузки и вывода продукции из модуля зоны разгрузки. Достигается расширение технологических возможностей паллетирования грузов на ограниченных по площади производственных территориях. 7 з.п. ф-лы, 5 ил.
1. Модульный роботизированный комплекс паллетирования штучных грузов, содержащий оборудование в виде конвейера для зоны загрузки штучных грузов, оборудование для зоны разгрузки паллетированной продукции, накопитель для зоны размещения прокладочных материалов, управляемое устройство с рабочими схватами для зоны позиционирования груза и паллетов, радиус действия рабочей зоны схватов позиционирован на перемещение прокладочных материалов из накопителя на оборудование зоны разгрузки продукции, с конвейера зоны загрузки на прокладочный материал зоны разгрузки, отличающийся тем, что комплекс выполнен на основе мобильных модулей, имеющих возможность транспортирования и стыковки, каждый модуль имеет днище для контакта его с поверхностью производственной площади и для монтажа оборудования соответствующей зоны комплекса, по периметру днища каждого модуля установлено съемное относительно него ограждение на основе последовательно расположенных с каждой стороны днища разъемно соединяемых между собой панелей, в модуле зоны позиционирования использовано устройство с рабочими схватами на основе промышленного робота-манипулятора, днище данного модуля с возможностью фиксации состыковано с днищами соседних модулей и последних между собой со стороны демонтированных на них панелей ограждения и с образованием по внешнему периметру комплекса ограждения с открытыми зонами для подачи груза в модуль зоны загрузки груза и вывода паллетируемой продукции из модуля зоны разгрузки паллетированной продукции.
2. Модульный роботизированный комплекс паллетирования штучных грузов по п. 1, отличающийся тем, что боковины днищ имеют прорези для вилочного погрузчика, обеспечивающего транспортирование модуля в зону установки его на опорную поверхность производственной площади.
3. Модульный роботизированный комплекс паллетирования штучных грузов по п. 1, отличающийся тем, что в качестве промышленного робота-манипулятора используют робот ABB IRB 460, имеющий возможность перенастройки схвата на захват для мешков, захват вакуумный, захват зажимной с нижней поддержкой, захват зажимной, 2-х секционный, с нижней поддержкой.
4. Модульный роботизированный комплекс паллетирования штучных грузов по п. 1, отличающийся тем, что в управляющем программном обеспечении модульного роботизированного комплекса паллетирования штучных грузов использован графический интерфейс для оптимизации радиуса действия рабочей зоны робота относительно зон расположения оборудования модулей комплекса.
5. Модульный роботизированный комплекс паллетирования штучных грузов по п. 1, отличающийся тем, что комплекс паллетирования снабжен упаковщиком продукции на паллетах на основе промышленного паллетообмотчика.
6. Модульный роботизированный комплекс паллетирования штучных грузов по п. 1, отличающийся тем, что внутренний контур панелей ограждения модулей выполнен из светопрозрачного материала, или сетчатым, или решетчатым.
7. Модульный роботизированный комплекс паллетирования штучных грузов по п. 1, отличающийся тем, что зона вывода паллетируемой продукции комплекса снабжена световым барьером на основе световой завесы (Light Curtain) для защиты обслуживающего персонала, доступа в опасные зоны или многолучевого светового барьера (Light Grid) для защиты доступа в опасные зоны.
8. Модульный роботизированный комплекс паллетирования штучных грузов по п. 1, отличающийся тем, что в качестве опорной поверхности для установки днищ модулей используют платформы полуприцепов автомобильного транспорта или платформы контейнеров для транспортировки железнодорожным или водным транспортом для транспортирования их в рабочие пространства различных производственных помещений.
| УСТРОЙСТВО ДЛЯ УКЛАДКИ В ТАРУ ШТУЧНЫХ ИЗДЕЛИЙ | 1996 |
|
RU2125954C1 |
| СПОСОБ УПРАВЛЕНИЯ СОРТИРОВОЧНОЙ УСТАНОВКОЙ С УКЛАДКОЙ ШТУЧНЫХ ГРУЗОВ В КОНТЕЙНЕРЫ | 2011 |
|
RU2472594C1 |
| УСТРОЙСТВО ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ ОТ СБОРНЫХ ТРАНСПОРТЁРОВ К УСТРОЙСТВАМ УКЛАДКИ ГРУЗОВ В ТАРУ | 2013 |
|
RU2548812C2 |
| УСТРОЙСТВО ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ ОТ СБОРНЫХ ТРАНСПОРТЁРОВ К УСТРОЙСТВАМ УКЛАДКИ ГРУЗОВ В ТАРУ | 2013 |
|
RU2572474C2 |
| DE 19853685 B4, 22.03.2007. | |||

