водящему 7 и отводящему 8 конвейерам Штабелеры - это самоходная тележка, на которой установлены в направляющих 10 подвижные от силовых цилиндров 20 и 21 рамы- 11 и 12 с поворот- нымч грузовыми платформами 13. Платформы, установленные против каждого яруса стеллажей, выполнены в виде рольгангов 16. Для одновременного перевода рольгангов в наклонное положение при загрузке ячеек склада служит подвижная стойка с упорами. Для загрузки любой ОДНОЙ ячейки склада служит подъемно-опускной сталкива- тель 29. Склад работает по программе
Поступающий груз снимается с конвейера нижним рольгангом 17. При ходе подвижной рамы 11 вверх и вниз груз поднимается на полшага вверх и перекладывается на соседнюю платформу на смежной раме 12, после чего эта штанга совершает движения вверх и вниз, а груз перекладывается вновь на соседнюю платформу на полшага выше. Таким образом, груз поднимается вверх. Штабелер для выгрузки работает аналогичным образом, только подвижная рама 12 при поступлении груза из склада начинает движение вниз. 1 з.п. ф-лы, 6 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированный склад-накопитель штучных грузов | 1988 |
|
SU1648852A1 |
| Устройство для загрузки и разгруз-Ки СТЕллАжЕй | 1979 |
|
SU812680A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Склад для хранения штучных грузов | 1981 |
|
SU1030264A1 |
| Склад для хранения цилиндрических изделий | 1982 |
|
SU1036628A1 |
| Склад для хранения изделий | 1979 |
|
SU804545A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Склад для хранения штучных грузов | 1976 |
|
SU734088A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Склад для хранения штучных грузов | 1989 |
|
SU1729958A1 |

Изобретение относится к хране - нию штучных грузов. Цель изобретения - упрощение конструкции и снижение энергоемкости. Склад содержит многоярусные стеллажи в виде наклонных рольгангов 2. Вдоль склада с обеих сторон по ходовым рельсам 4 перемещаются штабелер 5 для загрузки и штабелер 6 для выгрузки. Груз на склад и со склада поступает по по д- 4 , Ж/сл 30 Фил
1
Изобретение относится к хранению штучных грузов и может быть использовано в гибких автоматизированных производствах различных отраслей промыпшенности.
Цель изобретения - упрощение конструкции и снижение энергоемкости.
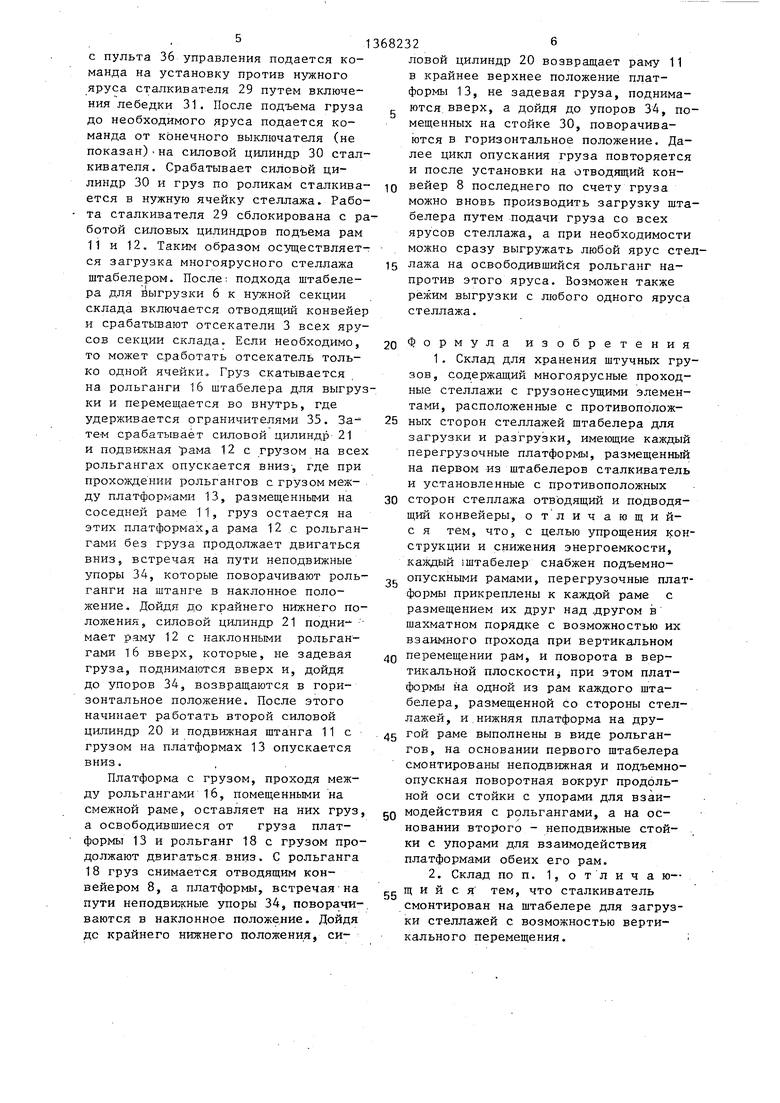
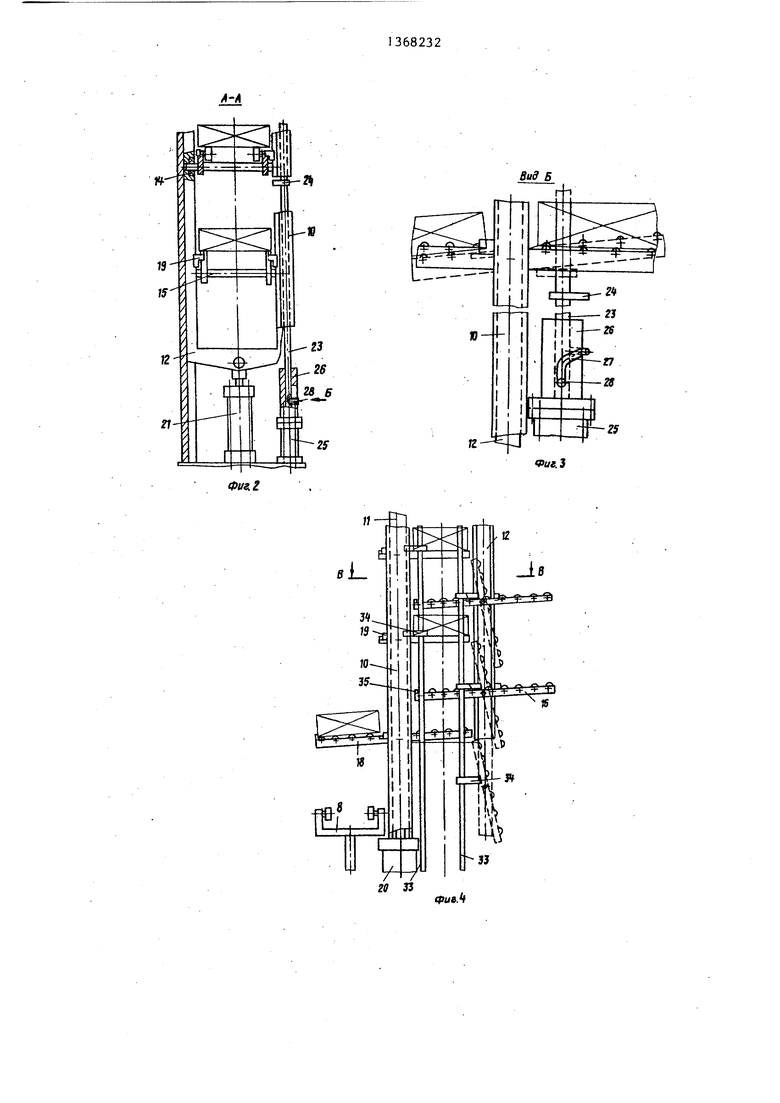
На фиг. 1 показан склад, общий вид; на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 - вид Б на фиг.2; на фиг.4- узел опускания груза на штабелере для в; 1рузки; на фиг. 5 - разрез В-В на фиг. 4j на фиг. 6 - узел снятия груза с конвейера.
В несущих ячейках 1 склада установлены стеллажи в виде наклонных рольгангов 2. В концевой части каждого рольганга установлены отсекатели 3, предназначенные для удерживания груза от самопроизвольного скатывания из ячеек склада.
Вдоль склада с обеих сторон проложены ходовые рельсы 4, по которым перемещаются штубеЛеры для загрузки 5 и выгрузки б. Штабелеры в свою очередь перемещаются вдоль установленных подводящего 7 и.отводящего 8 конвейеров., выполненных в виде приводных рольгангов. Штабелеры представляют собой самоходную тележку 9 с установленной на ней жесткой металлоконструкцией j внутри которой, в направляющих 10, перемещаются две подвижные рамы 11 и 12 с установленными на них через определенньй шаг грузовыми платформами 13, имеющие воз
Г
0
5
0
5
можность проворачиваться в цапфах 14 вокруг своей оси 15. Платформы, установленные против каждого яруса стеллажей, выполненьт в виде рольгангов 16. Такую же конструкцию имеют платформа 17, служащая для снятия груза с подводящего конвейера,, и платформа 18, служащая для установки груза на отводящий конвейер. Платформы на рамах установлены с возможностью прохода относительно друг друга и со смещением на полшага. От проворачивания под собственным весом платформы удерживаются ограничителями 19, установленными на подвижных рамах. Подвижные рамы с платформами приводятся в движение от силовых пневматических цилиндров 20 и 21.
Штабелер 5 для загрузки содержит неподвижную стойку 22 с одним упором, который устанавливает рольганг 17, служащий для снятия груза с подводящего конвейера 7, в наклонное положение при подъеме рамы 11 вверх и содержит подвижную стойку 23 с расположенными на ней упорами 24, воздействующими при подъеме на рольгангах 16 с целью установки их в наклонное положение для скатывания груза в стеллажи. Движение стойки вверх и вниз осуществляется силовым пневматическим цилиндром 25 в направляющей 26, которая содержит паз 27, вьшолненный таким образом, что при подъеме стойки 23 вверх штифт 28,
установленный на ней, перемещаясь по пазу, поворачивает стойку вокруг оси и упоры 24, расположенные на стойке, приводят рольганги 16 в наклонное положение, при этом груз, расположенньй на них, свободно скатвается со всех ярусов в ячейки склада.
При необходимости загрузки любой одной ячейки склада предусмотрен подъемно-опускной сталкиватель 29 в виде силового пневматического цилиндра 30, установленного на основание. Перемещение основания осуществляется по направляющим 10 лебедкой
31,установленной на штабелере. Кроме того, рольганг 17 содержит упор
32,предназначенный для удержания груза на подводящем конвейере 7 и установки его на рольганг при подъеме штанги 11.
Штабелер 6 для выгрузки помимо подвижных рам 11 и 12 с грузовыми платформами 13 содержит две неподвижные стойки 33 с расположенными на них через определенный шаг упорами 34, служащими для установки платформ в наклонное положение при ходе рам вниз с целью свободного прохода, не задевая груза при подъеме штанг вверх, и установки платформ в горизонтальное положение, -кода подвижные рамы занимают конечное верхнее положение. Все рольганги с:.- снабжены ограничителями 35, .предотвращающими ГРУЗ от скатьшания. Для управления штабелерами используется пульт 36. Автоматическая ра- . бога склада осуществляется при помощи шкафа управления (не показан).
Склад работает следующим образом
Для загрузки и разгрузки ячеек стеллажа задается программа, Штабелеры для загрузки 5 и выгрузкр 6 дви- 5 груз расположен на всех ярусах, с
гаются вдоль склада по ходовым рельсам 4 и останавливаются против нужной секции склада, причем для свободного прохода штабелера подводящего конвейера 7 подвижная рама 11 с рольгангами 17 находится в верхнем положении. По приходу на место штанга с рольга.нгом 17 опускается в нижнее положение. После включения подводящего конвейера 7 груз с определенным интервалом, равным времени подъема и опускания рамы 11, поступает по подводящему конвейеру к штабелеру, где задержи
3682324
вается упором 32, после этого срабатывает конечный выключатель (не показан) , установленный на конвейере, даю- с щий команду на подъем рамы 11 с грузом силовому цилиндру 20. После достижения рамой 11 крайнего верхнего положения рольганг 17 с грузом, упором на стойке 22, переводится в наклонное
10 положение и груз по роликам под собственным весом скатывается во внутрь штабелера, где удерживается ограничителем 35, установленным на рольганге. Затем силовой цилиндр 20 опускает
15 штангу с грузом вниз, рольганг свободно проходит между платформой 13, расположенной на соседней штанге, а груз задерживается на ней. Освободив- , шийся от груза рольганг 17 со штангой
20 движется вниз до конечного положения. После этого включается второй силовой цилиндр 20, при ходе которого вверх и вниз осуществляется подъем груза На один шаг, при этом при подъеме
25 второй рамы 12 вверх с грузом осуществляется поворот платформы, расположенной вверх с грузом, осуществляется поворот платформы, расположенной на первой раме 11, в наклонное положение,
30 а после подъема груза наклонная платформа под своим весом возвращается в горизонтальное положение. При ходе второй рамы 12 с грузом вниз груз перекатывается на платформу 13 первой
3g рамы. Таким образом осуществляется подъем груза на один шаг вверх. Одновременно новый груз по подводящему конвейеру укладывается на рольганг 17 и силовой.цилиндр 20, поднимая и
40 опуская раму 11 с грузом на двух платформах, перекладьшает их на соседние рольганги, помещенные на второй раме 12. После достижения грузом верхнего последнего яруса, при этом
0
5
Пульта 36 управления подается команда .(это может производиться автоматически) на сброс груза в ячейки стеллажа всех ярусов одновременно путем включения силового цилиндра 25 на подъем подвижной стойки 23. При этом стойка, поднимаясь, проворачивается вокруг оси и упоры 24 переводят рольганги 16 с грузом в наклонное положение, при этом груз под собственным весом по роликам скатывается в стеллажи склада.
Если необходимо произвести загрузку только одного яруса стеллажа, то
с пульта 36 управления подается команда на установку против нужного яруса сталкивателя 29 путем включения лебедки 31. После подъема груза до необходимого яруса подается команда от конечного выключателя (не показан)на силовой цилиндр 30 сталкивателя. Срабатывает силовой цилиндр 30 и груз по роликам сталкивается в нужную ячейку стеллажа. Работа сталкивателя 29 сблокирована с ра ботой силовых цилиндров подъема рам 11 и 12. Таким образом осуществляется загрузка многоярусного стеллажа штабелером. После: подхода штабеле- ра для Выгрузки 6 к нужной секции склада включается отводящий конвейер и срабатывают отсекатели 3 всех ярусов секции склада. Если необходимо, то может сработать отсекатель только одной ячейки. Груз скатывается на рольганги 16 штабелера для выгрузки и перемещается во внутрь, где удерживается ограничителями 35. За- тем срабатывает силовой цилиндр 21 и подвижная рама 12 с грузом на всех рольгангах опускается вниз, где при прохождении рольгангов с грузом между платформами 13, размеп,енными на соседней раме 11, груз остается на этих платформах,а рама 12 ,с рольгангами без груза продолжает двигаться вниз, встречая на пути неподвижные упоры 34, которые поворачивают рольганги на штанге в наклонное положение . Дойдя до крайнего нижнего положения, силовой цилиндр 21 подни- мает раму 12 с наклонными рольгангами 16 вверх, которые, не задевая груза, поднимаются вверх и, дойдя до упоров 34, возвращаются в горизонтальное положение. После этого начинает работать второй силовой цилиндр 20 и подвижная штанга 11с грузом на платформах 13 опускается вниз.
Платформа с грузом, проходя между рольгангами 16, помещенными на смежной раме, оставляет на них груз а освободивщиеся от груза платформы 13 и рольганг 18 с грузом продолжают двигаться, вниз. С рольганга 18 груз снимается отводящим конвейером 8, а платформы, встречая на пути неподвюкные упоры 34, поворачиБаются в наклонное положение. Дойдя дс крайнего нижнего положения, силовой цилиндр 20 возвращает раму 11 в крайнее верхнее положение платформы 13, не задевая груза, поднимаются вверх, а дойдя до упоров 34, помещенных на стойке 30, поворачиваются в горизонтальное положение. Далее цикл опускания груза повторяется и после установки на отводящий конвейер 8 последнего по счету груза
можно вновь производить загрузку щта- белера путем подачи груза со всех ярусов стеллажа, а при необходимости можно сразу выгружать любой ярус стеллажа на освободившийся рольганг напротив этого яруса. Возможен также режим выгрузки с любого одного яруса стеллажа.
формула изобретения
сторон стеллажа отводящий и подводящий конвейеры, о с я тем, что, с
5
0
тличающи й- целью упрощения конструкции и снижения энергоемкости, каждый 1щтабелер снабжен подъемно- опускными рамами, перегрузочные платформы прикреплены к каждой раме с размещением их друг над другом в шахматном порядке с возможностью их взаимного прохода при вертикальном перемещении рам, и поворота в вертикальной плоскостиj при этом платформы на одной из рам каждого штабелера, размещенной со стороны стеллажей, и.нижняя платформа на дру5 гой раме выполнены в виде рольгангов, на основании первого штабелера смонтированы неподвижная и подъемно- опускная поворотная вокруг продольной оси стойки с упорами для взаиQ модействия с рольгангами, а на основании второго - неподвижные стойки с упорами для взаимодействия платформами обеих его рам.
Z1
2S
Buff Б
2S
К
fus.Z
«33
ФиеЛ
10
В1ШИПИ Заказ 17 О/Т 8Тираж 757
Произв.-полигр. пр-тие, г.Ужгород, ул. Проектная, 4
/2
/
16
ф с|з I
-ф фу
Фиг.5
Фиг. 6
Подписное
| Смехов А.А | |||
| Автоматизированные склады | |||
| -М | |||
| : Машиностроение, 1979, с | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |
