Изобретение относится к области гидроакустики и может быть использовано для построения навигационных гидроакустических станций освещения ближней обстановки и получения более полных данных об обнаруженных объектах и районе функционирования носителя станции.
Известна навигационная гидроакустическая станция освещения ближней обстановки (НГАС ОБО) [Войтов А.А., Полканов К.И., Голубева Г.Х. Патент РФ №2225991 от 20.03.2004 г. Навигационная гидроакустическая станция освещения ближней обстановки. МПК G01S 15/00; 7/52]. Станция содержит приемопередающую антенну, генератор, блок управления, коммутатор приема передачи с трактом предварительной обработки, первую цифровую вычислительную систему, соединенную с выходом тракта предварительной обработки интерфейсами, последовательно соединенную с первой вторую цифровую вычислительную машину совместно с монитором, тракт измерения скорости звука, цифроаналоговый тракт прослушивания.
Недостатком такой станции является ограниченные возможности обзора пространства, поскольку приемопередающая антенна расположена в носовой части подводного аппарата и осматривает пространство только по ходу движения, и классификация осуществляется оператором по виду информации, выводимой на индикатор.
Известна навигационная гидроакустическая станция освещения ближней обстановки [Горланов Н.Е., Величкин С.М., Тимошенков В.Г., Ярыгин В.А. Патент РФ №117646 от 27.06.2012 г. Навигационная гидроакустическая станция освещения ближней обстановки. МПК G01S 15/00]. Эта навигационная станция содержит три антенны: носовую антенну, крестообразную антенну, антенну кормового обзора Совместное использование трех различных антенн позволяет обнаруживать объекты в любом направлении, обрабатывать и представлять оператору для принятия решения. Однако поступающий одновременно большой объем информации от трех антенн и их автономная обработка не может быть обработана оператором за ограниченное время между эхосигналами, что приводит к пропуску эхосигналов от опасной цели или к не правильной обработки поступившей информации, в частности к ошибочной классификации.
Известна полезная модель на навигационную гидроакустическую станцию освещения ближней обстановки [Горланов Н.Е., Тимошенков В.Г., Ярыгин В. А. Патент РФ №127945 от 10.05.2012 г. Навигационная гидроакустическая станция освещения ближней обстановки. МПК G01S 15/00], содержащую носовую антенну и крестообразную антенну и антенны кормового обзора. В этой полезной модели использованы три автономные системы обнаружения и дополнительная система унификации полученной информации между автономными системами. Это делает навигационную станцию очень сложной, дорогостоящей, при этом такая конфигурация не позволяет оператору оценивать поступающую одновременно информацию от 3-х различных источников.
Тем не менее, по количеству общих признаков, наиболее близким аналогом заявляемой НГАС ОБО является навигационная гидроакустическая станция освещения ближней обстановки [Горланов Н.Е., Величкин С.М., Тимошенков В.Г., Ярыгин В.А. Патент РФ №117646 от 27.06.2012 г. Навигационная гидроакустическая станция освещения ближней обстановки. МПК G01S 15/00].
Полезная модель содержит носовую антенну, крестообразную антенну, антенну кормового обзора, генераторы излучения зондирующих сигналов, коммутаторы, первый тракт предварительной обработки, второй тракт предварительной обработки, блок формирования общего кадра, блок управления и отображения, что позволяет обнаруживать объекты в любом направлении, обрабатывать полученную информацию и предоставлять ее оператору для принятия решения.
Поступающий одновременно большой объем информации от трех антенн и их автономная обработка не может быть обработана оператором за ограниченное время, что приводит к пропуску эхосигналов от опасной цели или к неправильной обработки поступившей информации, в частности к не правильной классификации.
Недостатком рассматриваемой полезной модели является ограниченные возможности по классификации обнаруженных целей. Классификация осуществляется оператором по информации, выводимой на индикатор автономно от каждой антенны, что существенно ограничивает возможности работы навигационной станции в сложной помехо-сигнальной ситуации при наличии большого числа обнаруженных целей разными антеннами. Кроме того, характеристики антенн различные и поэтому оператору трудно проводить классификацию обнаруженных целей из-за неоднозначности полученных измерений.
Задача изобретения заключается в обеспечении одновременного обзора пространства и повышении достоверности классификации обнаруженных целей.
Техническим результатом предлагаемого технического решения является сокращение автономно работающей аппаратуры, обрабатывающей информацию, полученную каждой антенной, и формирование одновременного обзора пространства по вертикали и по горизонтали в верхней полусфере, что обеспечивает более достоверное обнаружение и классификацию представляемой информации.
Указанный технический результат достигается тем, что в известную навигационную гидроакустическую станцию освещения ближней обстановки (НГАС ОБО), содержащую две антенны, одна из которых носовая, обеспечивающая излучение зондирующего сигнала в направлении движения гидролокатора, соединенные через первый и второй коммутаторы приема-передачи с первым и вторым генераторами зондирующего сигнала, блок идентификации, первый процессор обработки, вход которого соединен с выходом первого коммутатора приема-передачи, а выход с системой управления и отображения, при этом первый и второй выходы системы управления соединены со входами первого и второго коммутатора приема-передачи, соответственно, введены новые признаки, а именно вторая антенна, установленная на рубке подводной лодки, выполнена цилиндрической, с возможностью излучение в вертикальной полусфере, для чего в ней сформированы вертикальные и горизонтальные каналы, в НГАС ОБО введены блок формирования вертикальных каналов, блок формирования горизонтальных каналов, второй и третий процессоры обработки и система классификации, при этом вертикальные каналы цилиндрической антенны через блок формирования вертикальных каналов соединены со вторым процессором обработки, а ее горизонтальные каналы через блок формирования горизонтальных каналов соединены с третьим процессором обработки, второй и третий процессоры обработки содержат каждый последовательно соединенные блок обработки временных реализаций, блок обнаружения и измерения параметров, блок выбора временных реализаций, а система классификации содержит последовательно соединенные блок идентификации, блок оценки признаков и блок принятия решений, при этом выходы блоков выбора временных реализаций второго и третьего процессоров обработки соединены с первым и вторым входами блока идентификации, соответственно, а блок принятия решения соединен двусторонней связью со вторым входом системы управления и отображения.
Использование в НГАС ОБО цилиндрической антенны, на которой сформированы горизонтальные и вертикальные каналы позволило отказаться от третьей антенны, а предложенное схемотехническое решение дало возможность обрабатывать всю полученную антеннами информацию в совокупности.
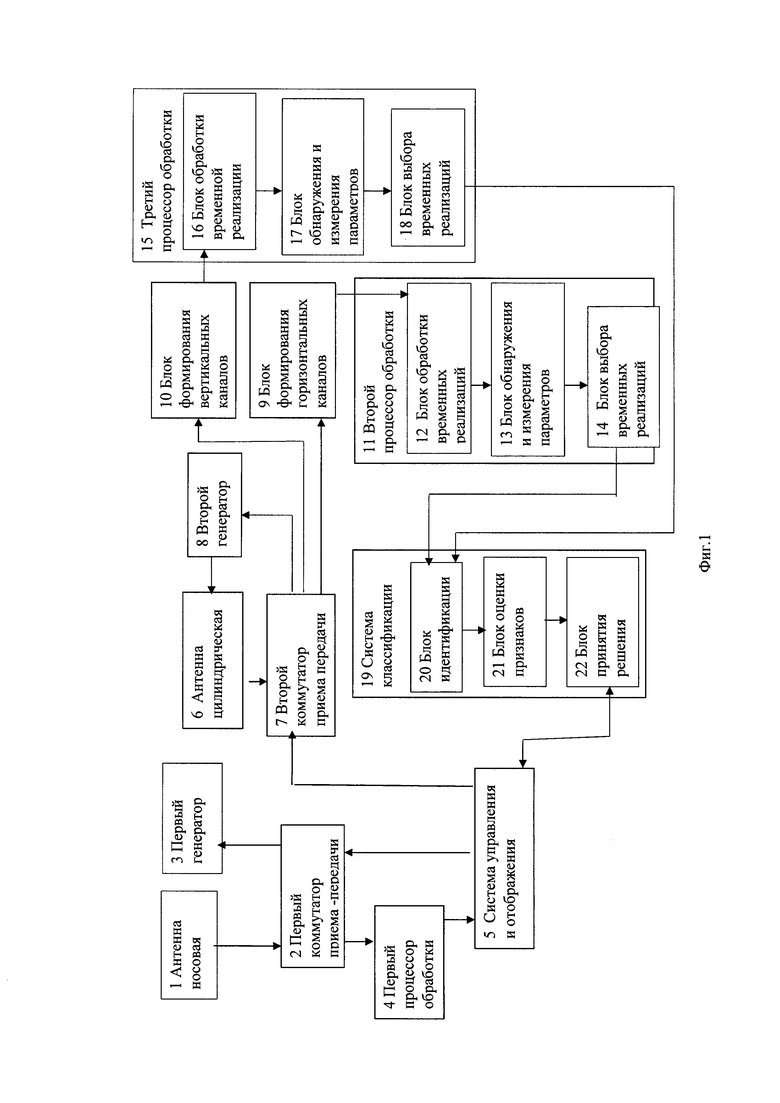
На фиг.1 представлена структурная схема заявленной навигационной гидроакустической станции освещения ближней обстановки.
Навигационная гидроакустическая система освещения ближней обстановки содержит последовательно соединенные носовую антенну 1, первый коммутатор приема-передачи 2, первый процессор обработки 4, систему управления и отображения 5. Первый выход системы управления и отображения 5 соединен через коммутатор приема-передачи 2 с первым задающим генератором 3. Второй выход системы управления и отображения 5 через второй коммутатор приема-передачи 7 соединен со вторым задающим генератором 8, соединенным с цилиндрической антенной 6. Гидроакустические преобразователи, формирующие горизонтальные каналы цилиндрической антенны 6 через второй коммутатор приема-передачи 7, соединены с блоком формирования горизонтальных каналов 9, соединенным с блоком обработки временных реализаций 12 второго процессора обработки 11 и далее через блок обнаружения и измерения параметров 13 и блок выбора временных реализаций 14 с первым входом блока идентификации 20 системы классификации 19. Гидроакустические преобразователи, формирующие вертикальные каналы цилиндрической антенны 6, через второй коммутатор приема-передачи 7 соединены с блоком формирования вертикальных каналов 10, который соединен с блоком обработки временных реализаций 16, третьего процессора обработки 15 и далее через блок обнаружения и измерения параметров 17 и блок выбора временных реализаций 18 соединены со вторым входом блока идентификации 20 системы классификации 19. Выход блока идентификации 20 через блок оценки признаков 21 и блок принятия решения 22 соединен двусторонней связью со вторым входом системы управления и отображения 5.
Цифровые процессоры являются известными устройствами, которые предназначены для осуществления конкретных алгоритмов обработки с использованием аппаратных решений и жесткой логикой вычислений. Их применение повышает быстродействие цифровых вычислительных систем в несколько раз, и в большинстве случаев сокращает аппаратные затраты. Описания спецпроцессоров приведены в книге [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. - Наука, 2004. - 281 с]. Там же приведено описание гидроакустических комплексов, построенных на основе спецпроцессоров [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. - Наука, 2004.-с.296, 328].
Вопросы, связанные с цифровой обработки сигналов, вопросы модуляции и демодуляции, спектральный анализ, а также использование пакетов расширения «Матлаб», которые обеспечивают последовательную процедуру использования алгоритмов, рассмотрены в пособии [Сергиенко А.Б. Цифровая обработка сигналов. - БХВ-Петербург, 2011. -с.655].
Работа, предлагаемой НГАС ОБО осуществляется следующим образом. Освещение ближней обстановки имеет три автономных режима работы: Либо носовой антенной 1 осматривают нижнюю полусферу обзора, либо антенной 6 осматривают верхнюю полусферу обзора, либо одновременно можно отображать информацию на индикаторах системы 5 одновременно от двух антенн. Если работает только носовая антенна 1, то из системы управления 5 подается сигнала на коммутатор приема передачи 2 на включение задающего генератора 3, который формирует сигнал излучение и падает его на антенну 1. Антенна 1 излучает зондирующий сигнал, после чего переводится в режим приема и передает принятые эхосигналы через коммутатор 2 на вход процессора 4 и далее на систему 5 управления и отображения. Если возникает необходимость осмотра верхней полусферы, то система 5 подает сигнал через коммутатор 7 на генератор 8, который отключает через коммутатор 7 систему приема и падает излучаемый сигнал на цилиндрическую антенну 6. Принятые антенной 6 эхосигналы через блок 7 передаются в блок 9, который формирует горизонтальные каналы и блок 10, который формирует вертикальные приемные каналы. Принятые эхосигналы поступают блок 12 процессора 11, где обрабатываются входные временные последовательности всех горизонтальных каналов и передаются в блок 13, где формируется порог, и определяются реализации, превысившие порог по всем пространственным каналам. В блоке 14 из всей совокупности сигналов блока 13 выбираются временные последовательности реализаций эхосигналов, которые превысили порог для совместной обработки в системе классификации 19. Аналогично производится обработка информации, полученная через блок формирования вертикальных каналов 10, которые поступают в процессор 15 и обрабатываются в блоке 16, в блоке обнаружения и измерения параметров 17 и блоке выбора временных реализаций 18 по тем же процедурам, что и при обработке горизонтальны каналов. Эти временные реализации используют в системе классификации 19 для идентификации данных между горизонтальными и вертикальными каналами для выбранной цели и далее для выделения классификационных признаков и принятия решения.
На основании изложенного можно считать, что предлагаемое техническое решение позволяет проводить одновременный обзор пространства по вертикали и по горизонтали в верхней полусфере, что обеспечивает более достоверное обнаружение и классификацию обнаруженных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА | 2012 |
|
RU2501038C1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2724245C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2726312C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2011 |
|
RU2465618C1 |
| Система автоматического обнаружения и классификации | 2020 |
|
RU2758586C1 |
| Гидроакустический способ управления торпедой | 2017 |
|
RU2649675C1 |
| Способ обработки и классификации гидролокационной информации | 2019 |
|
RU2725517C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |
Изобретение относится к области гидроакустики и служит для получения более полных данных об обнаруженных объектах и районе функционирования носителя станции. Технический результат - одновременный обзор пространства и повышение достоверности классификации обнаруженных целей. Результат достигается тем, что предложена навигационная гидроакустическая станция освещения ближней обстановки (НГАС ОБО), содержащая две антенны, одна из которых носовая, излучающая зондирующий сигнал в направлении движения гидролокатора, соединенные через первый и второй коммутаторы приема-передачи с первым и вторым генераторами зондирующего сигнала, блок идентификации, первый процессор обработки, вход которого соединен с выходом первого коммутатора приема-передачи, а выход с системой управления и отображения, при этом первый и второй выходы системы управления соединены с входами первого и второго коммутаторов приема-передачи соответственно, отличающаяся тем, что вторая антенна, установленная на рубке подводной лодки, выполнена цилиндрической с возможностью излучения в вертикальной полусфере, с вертикальными и горизонтальными каналами, в НГАС ОБО введены блоки формирования вертикальных и горизонтальных каналов, второй и третий процессоры обработки и система классификации. 1 ил.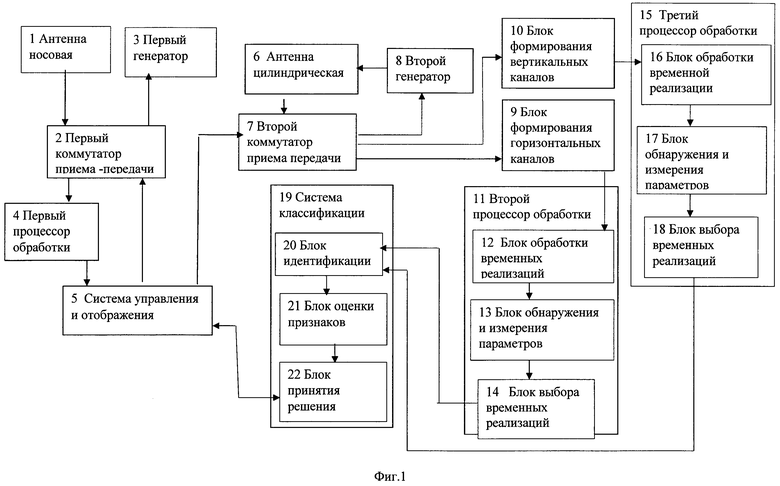
Навигационная гидроакустическая станция освещения ближней обстановки (НГАС ОБО), содержащая две антенны, одна из которых носовая, обеспечивающая излучение зондирующего сигнала в направлении движения гидролокатора, соединенные через первый и второй коммутаторы приема-передачи с первым и вторым генераторами зондирующего сигнала, блок идентификации, первый процессор обработки, вход которого соединен с выходом первого коммутатора приема-передачи, а выход с системой управления и отображения, при этом первый и второй выходы системы управления соединены с входами первого и второго коммутаторов приема-передачи соответственно, отличающаяся тем, что вторая антенна, установленная на рубке подводной лодки, выполнена цилиндрической с возможностью излучения в вертикальной полусфере, для чего в ней сформированы вертикальные и горизонтальные каналы, в НГАС ОБО введены блок формирования вертикальных каналов, блок формирования горизонтальных каналов, второй и третий процессоры обработки и система классификации, при этом горизонтальные каналы цилиндрической антенны через блок формирования горизонтальных каналов соединены со вторым процессором обработки, а ее вертикальные каналы через блок формирования вертикальных каналов соединены с третьим процессором обработки, второй и третий процессоры обработки содержат каждый последовательно соединенные блок обработки временных реализаций, блок обнаружения и измерения признаков и блок выбора временных реализаций, а система классификации содержит последовательно соединенные блок идентификации, блок оценки признаков и блок принятия решений, при этом выходы блоков выбора временных реализаций второго и третьего процессоров обработки соединены с первым и вторым входами блока идентификации соответственно, а блок принятия решения соединен двусторонней связью со вторым входом системы управления и отображения.
| Способ переработки красного шлама, содержащего титан | 1958 |
|
SU117646A1 |
| Устройство для подачи к станку цилиндрических или шаровидных изделий | 1959 |
|
SU127945A1 |
| Гидроакустическая станция для обнаружения малоразмерных объектов | 2017 |
|
RU2680673C1 |
| CN 110780286 A, 11.02.2020 | |||
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ВОЗДУХА ИЗ РАБОЧЕЙ ЖИДКОСТИ ЗАКРЫТЫХ ГИДРАВЛИЧЕСКИХ СИСТЕМ ВОЗДУШНЫХ СУДОВ | 2013 |
|
RU2553404C1 |

