Изобретение относится к пневматическим захватам и может быть использовано для перемещения штучных предметов с газонепроницаемой поверхностью.
Известен электромагнитный вакуумный захват [а.с. №821378, МКИ В66С 1/ 02, опубл. 15.04.81 г, бюл. №14], содержащий корпус, вакуумную камеру, соединенную с источником вакуума, электромагнит с катушкой возбуждения и полостью, сообщающейся с вакуумной камерой, упругую манжету.
К недостаткам данного устройства относят малое усилие вакуумного захвата изделий из немагнитных материалов, так как диаметр поперечного сечения сердечника значительно меньше диаметра вакуумной камеры. При аварийном отключении электроэнергии возвратная пружина перемещает сердечник захвата в нижнее (исходное) положение, что приводит к исчезновению вакуума под манжетой захвата, то есть захват отключается, пропадает подъемная сила, что обусловливает отсоединение груза от захвата.
Наиболее близким по назначению и совокупности признаков к заявляемому устройству является известный вакуумный захват [патент RU № 195053 U1, МПК B66C 1/02, опубл. 14.01.2020], который содержит электромагнит с корпусом, якорем, расположенную между ними пружину, размещенную в корпусе обмотки, соединенный с ней выключатель, держатель с манжетой снабженный пневмоцилиндром с корпусом и поршнем, а также гибкой трубкой, соединяющей держатель с пневмоцилиндром. Корпус пневмоцилиндра жестко соединен с корпусом электромагнита, а поршень - с его якорем. Площадь поперечного сечения поршня больше площади поперечного сечения якоря электромагнита. Указанное устройство принято в качестве прототипа.
Признаки прототипа, совпадающие с существенными признаками заявляемого устройства - пневматический захват содержит электромагнит, состоящий из корпуса, внутри которого размещены обмотка, якорь и пружина, соединенный с обмоткой электромагнита источник питания и выключатель, держатель с манжетой, соединенный посредством гибкой трубки с пневмоцилиндром, состоящим из корпуса, поршня и штока; корпус пневмоцилиндра жестко соединен с корпусом электромагнита, а шток - с его якорем, при этом площадь поперечного сечения поршня пневмоцилиндра больше площади поперечного сечения якоря электромагнита.
К недостаткам известного устройства прототипа относят следующее.
Создание вакуума под манжетой держателя и работа захвата при перемещении груза обеспечивается за счет работы электромагнита. Таким образом, при функционировании захвата расходуется энергия источника питания не только на удержание груза, но и на преодоление сил, возникающих при упругой деформации пружины. Указанное обусловливает повышенный расход электроэнергии при работе устройства, принятого в качестве прототипа, а также необходимость использования электромагнита избыточной мощности, следовательно, увеличение массогабаритных характеристик известного вакуумного захвата.
При аварийном отключении электроэнергии и потере напряжения на обмотке электромагнита во время перемещения груза, якорь электромагнита и соединенный с ним штоком поршень пневмоцилиндра перемещаются пружиной в положение, при котором исчезает вакуум под манжетой держателя, вследствие чего вакуумный захват перестает функционировать, а перемещаемый груз отсоединяется от захвата.
В конструкции известного устройства не предусмотрены приспособления для контроля состояния груза при перемещении, в частности, устройств, сигнализирующих о столкновении перемещаемого груза с препятствием.
Задачами, на решение которых направлено предлагаемое изобретение, являются: уменьшение массы и размеров вакуумного захвата; снижение расхода энергии при работе вакуумного захвата; исключение самопроизвольного отсоединения груза от захвата при аварийном отключении электроэнергии; контроль за состоянием груза при перемещении захвата и отслеживание столкновений груза с препятствием.
Поставленные задачи решаются за счет того, что в известном устройстве, содержащем электромагнит, состоящий из корпуса, внутри которого размещены обмотка, якорь и пружина, соединенный с обмоткой электромагнита источник питания и выключатель, держатель с манжетой, соединенный посредством гибкой трубки с пневмоцилиндром, состоящим из корпуса, поршня и штока, при этом корпус пневмоцилиндра жестко соединен с корпусом электромагнита, а шток - с его якорем, площадь поперечного сечения поршня пневмоцилиндра больше площади поперечного сечения якоря электромагнита, согласно изобретению шток пневмоцилиндра размещен коаксиально внутри пружины, установленной между якорем электромагнита и поршнем пневмоцилиндра, при этом на гибкой трубке закреплены датчики контроля положения гибкой трубки относительно корпуса пневмоцилиндра, соединенные с блоком управления манипулятором. В вариантах изобретения на гибкой трубке могут быть размещены датчики деформации, соединенные с блоком управления манипулятором, а для стабилизации манжеты держателя в пространстве предусмотрены дополнительные упругие элементы, например, пружины.
Признаки предлагаемого технического решения отличительные от прототипа - шток пневмоцилиндра размещен коаксиально внутри пружины, установленной между якорем электромагнита и поршнем пневмоцилиндра; на гибкой трубке закреплены датчики контроля положения гибкой трубки относительно корпуса пневмоцилиндра. В вариантах изобретения на гибкой трубке могут быть размещены датчики деформации. В вариантах изобретения для стабилизации манжеты держателя в пространстве предусмотрены дополнительные упругие элементы, например, пружины.
Благодаря установке штока пневмоцилиндра коаксиально внутри пружины, размещенной между якорем электромагнита и поршнем пневмоцилиндра, создание вакуума под манжетой держателя, соединенной с поднимаемым грузом, обеспечивается за счет работы пружины. Таким образом, в случае аварийного отключения электроэнергии и исчезновения напряжения на обмотке электромагнита, заданное значение вакуума под манжетой держателя будет обеспечено посредством функционирования пружины. Следовательно, вакуумный захват обеспечит заданное подъемное усилие для удержания присоединенного груза.
При функционировании захвата электромагнит выполняет работу только на преодоление упругих сил пружины и не задействуется при удержании груза. Следовательно, возможно использовать электромагнит меньшей мощности, массы и размеров по сравнению с устройством принятым за прототип.
Напряжение на катушку электромагнита подается кратковременно. Создание подъемного усилия для удержания груза, то есть выполнение полезной работы пневматического захвата, обеспечивается за счет упругих сил пружины. Указанное определяет малый расход энергии при работе заявляемого устройства.
Установка датчиков контроля положения гибкой трубки относительно корпуса пневмоцилиндра или датчиков деформации гибкой трубки обеспечит контроль состояния груза при перемещении, позволит оперативно выявлять столкновения перемещаемого груза с препятствием.
Сущность заявляемого изобретения поясняется схемами, представленными на фиг. 1-2.
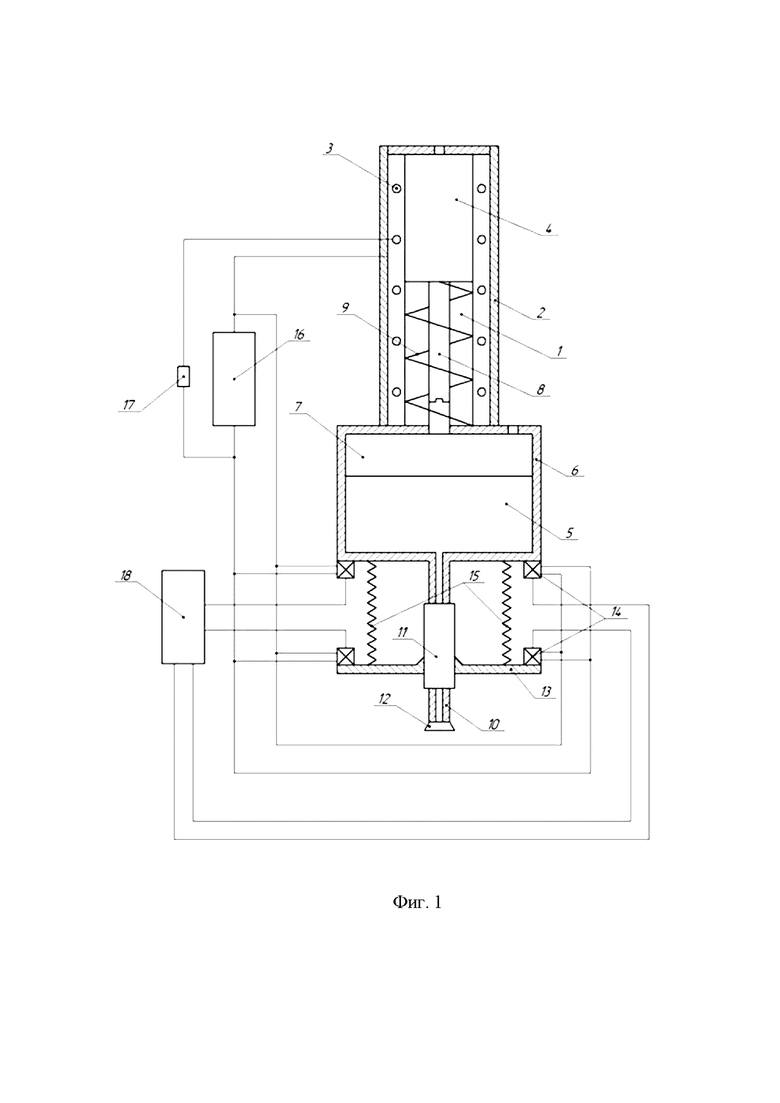
На фиг. 1 приведена схема вакуумного захвата с датчиками контроля положения гибкой трубки.
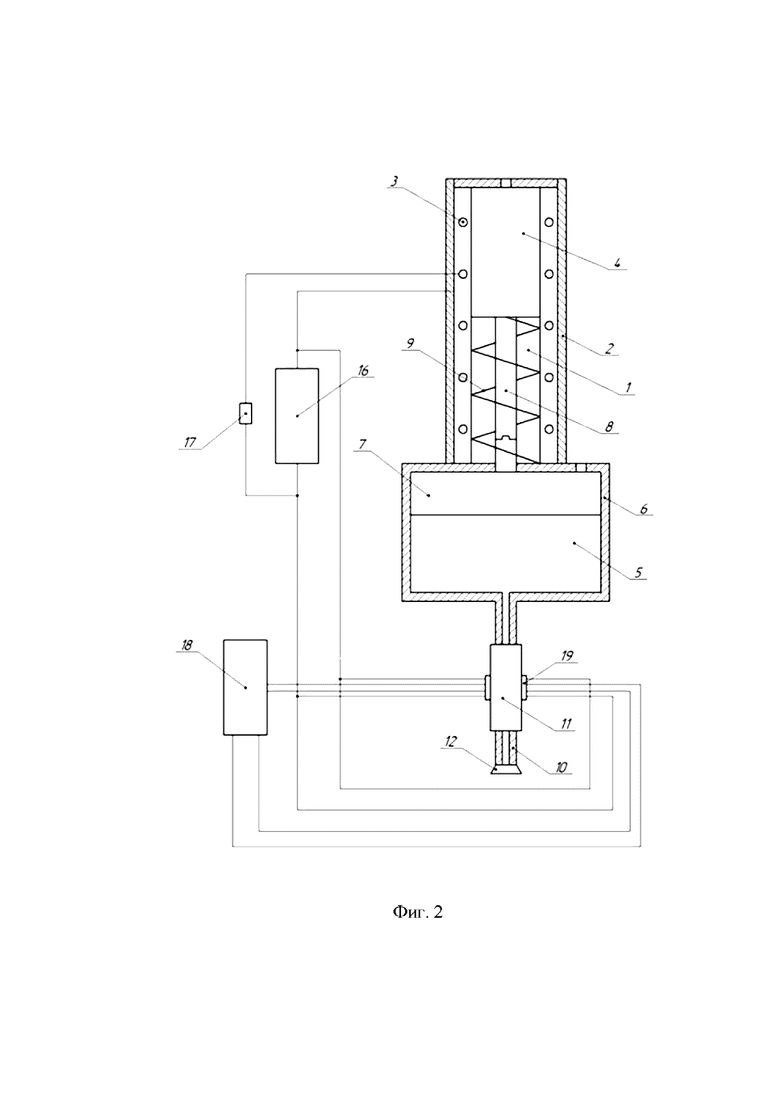
На фиг. 2 приведена схема вакуумного захвата с датчиками деформации гибкой трубки.
Сущность заявляемого изобретения заключается в следующем. Вакуумный захват (фиг. 1) монтируется, например, на манипуляторе портального укладчика (не показан на фиг. 1) и осуществляет присоединение и удержание груза при перемещении в пространстве. Вакуумный захват состоит из электромагнита 1, в состав которого входит корпус 2, катушка 3 и якорь 4. Корпус 2 электромагнита 1 соединен с пневмоцилиндром 5, состоящим из корпуса 6, поршня 7 и штока 8. Шток 8 соединен с якорем 4 электромагнита 1 и расположен коаксиально внутри пружины 9, размещенной между якорем 4 и поршнем 7. Площадь поперечного сечения поршня пневмоцилиндра больше площади поперечного сечения якоря электромагнита.
Поршневая полость пневмоцилиндра 5 соединена с держателем 10, состоящим из гибкой трубки 11 и манжеты 12. В вариантах исполнения на гибкой трубке 11 может быть смонтирована пластина 13 с датчиками контроля положения 14. В вариантах изобретения центровка пластины 13 относительно корпуса 6 пневмоцилиндра 5 может осуществляться посредством упругих элементов 15, например, пружин. Напряжение на катушку 3 электромагнита 1 подается от источника питания 16, управление которым осуществляется выключателем 17. Информация с датчиков контроля положения 14 передается в блок управления 18, соединенный с выключателем 17.
В вариантах изобретения датчики контроля положения 14 могут быть заменены датчиками деформации 19, установленными на гибкой трубке 11 (фиг. 2).
Заявляемое устройство работает следующим образом. Вакуумный захват посредством манипулятора (не показан на фиг. 1 и 2) позиционируют рядом с предметом, предназначенным для перемещения (не показан на фиг. 1 и 2). На катушку 3 электромагнита 1 (см. фиг. 1), размещенного в корпусе 2 от источника питания 16 подается напряжение. При этом якорь 4 сдвигается в крайнее нижнее положение, сжимая пружину 9, перемещая шток 8 и поршень 7 внутри корпуса 6 пневмоцилиндра 5.
Манжета 12 держателя 10 устанавливается на поверхность предмета (груза), предназначенного для перемещения. Выключатель 17 размыкает электрическую цепь между источником питания 16 и катушкой 3 электромагнита 1. Под действием пружины 9 якорь 4 сдвигается в крайнее верхнее положение, перемещая присоединенные к нему шток 8 и поршень 7 пневмоцилиндра 5, и создавая вакуум внутри держателя 10 и под манжетой 12. Таким образом, создается подъемная сила для перемещения груза. В случае отключения электроэнергии (выхода из строя автономного источника питания 16 или отключения от питающей сети) захват обеспечивает удержание перемещаемого груза за счет действия упругих сил пружины 9.
В случае столкновения перемещаемого предмета (груза) с препятствием осуществляется деформация гибкой трубки 11. При этом изменяется расстояние между парами датчиков положения 14, установленных по краям пластины 13 и на корпусе 6 пневмоцилиндра 5. Фиксация изменения расстояния между парами датчиков положения 14 осуществляется блоком управления 18, который подает команду на отключение манипулятора (не показан на фиг. 1).
При отводе заявляемого вакуумного захвата и перемещаемого предмета (груза) от препятствия, положение пластины 13 и манжеты 12 держателя 10 в пространстве стабилизируется посредством упругих элементов 15, например, пружин.
В вариантах изобретения вместо датчиков контроля положения 14 могут использоваться датчики деформации 19, установленные на гибкой трубке 11 (фиг. 2). При столкновении перемещаемого груза, закрепленного под манжетой 12, датчики 19 фиксируют деформацию гибкой трубки 11 и передают сигнал на блок управления 18, отключающий манипулятор (не показан на фиг. 2).
Таким образом, заявляемое устройство позволяет сохранить подъемную силу для удержания перемещаемого груза при аварийном отключении электроэнергии, осуществлять контроль за состоянием груза при перемещении, в частности, определять моменты столкновений груза с препятствиями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный насос | 1988 |
|
SU1684224A1 |
| Грузозахватное устройство | 1989 |
|
SU1717520A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РЕГУЛИРУЕМОГО КЛАПАНА С ПНЕВМОУСИЛИТЕЛЕМ | 2007 |
|
RU2439339C2 |
| Устройство для лужения трубок обливом | 1990 |
|
SU1787080A3 |
| Тормозное устройство колодочного типа | 1976 |
|
SU647485A1 |
| УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ОТСЕЧЕК НА ЭЛЕКТРОПРОВОДЯЩЕЕ ПОЛЕ ИЗДЕЛИЙ ОСТЕКЛЕНИЯ | 1986 |
|
RU1374700C |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ НА ПРОЧНОСТЬ | 2000 |
|
RU2178161C2 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ, РАСПРЕДЕЛИТЕЛЬ И БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ | 1995 |
|
RU2093715C1 |
| Автомат для сборки сердечников магнитопроводов электрических машин | 1980 |
|
SU959220A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1030292A1 |
Изобретение относится к вакуумным захватам для перемещения штучных предметов с газонепроницаемой поверхностью. Захват содержит электромагнит, состоящий из корпуса, внутри которого размещены обмотка, якорь и пружина, соединённый с обмоткой электромагнита источник питания и выключатель, держатель с манжетой, соединенный посредством гибкой трубки с пневмоцилиндром, состоящим из корпуса, поршня и штока. Корпус пневмоцилиндра жестко соединен с корпусом электромагнита, а шток – с его якорем, площадь поперечного сечения поршня пневмоцилиндра больше площади поперечного сечения якоря электромагнита. Шток пневмоцилиндра вакуумного захвата размещен коаксиально внутри пружины, установленной между якорем электромагнита и поршнем пневмоцилиндра. На гибкой трубке закреплены датчики контроля положения гибкой трубки относительно корпуса пневмоцилиндра, соединенные с блоком управления манипулятором. Достигается осуществление контроля за состоянием груза при перемещении и отслеживание столкновения груза с препятствием. 2 з.п. ф-лы, 2 ил.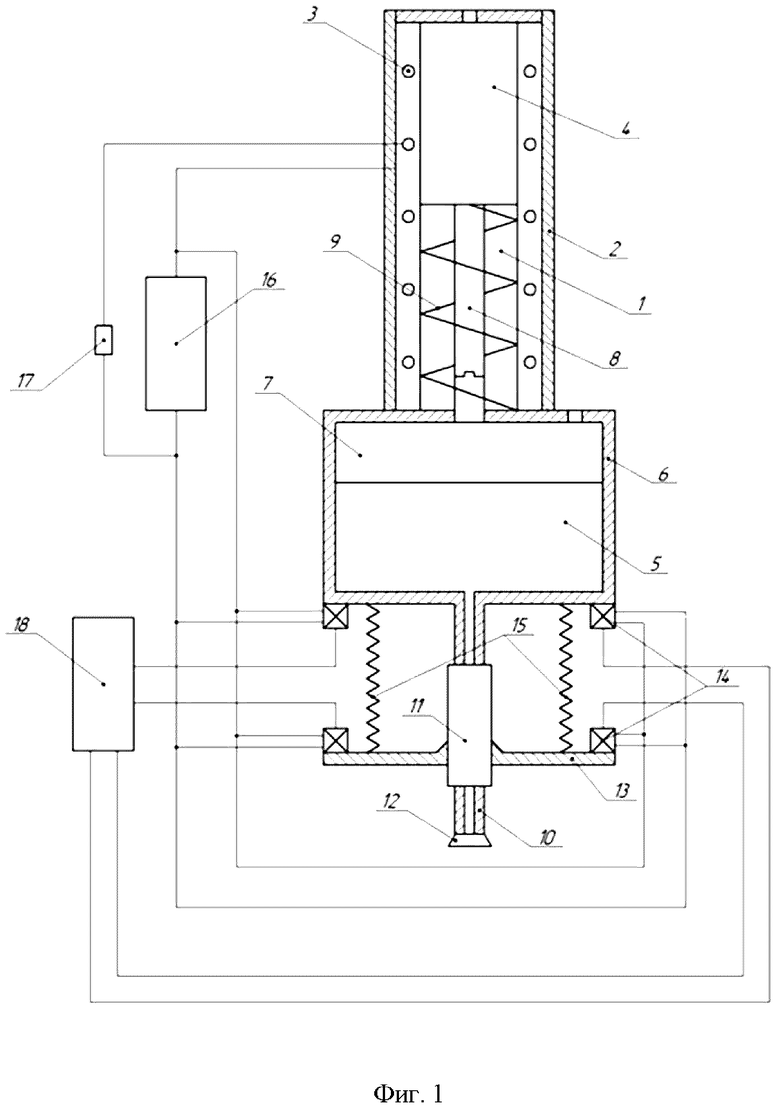
1. Вакуумный захват, содержащий электромагнит, состоящий из корпуса, внутри которого размещены обмотка, якорь и пружина, соединенный с обмоткой электромагнита источник питания и выключатель, держатель с манжетой, соединенный посредством гибкой трубки с пневмоцилиндром, состоящим из корпуса, поршня и штока, при этом корпус пневмоцилиндра жестко соединен с корпусом электромагнита, а шток - с его якорем, площадь поперечного сечения поршня пневмоцилиндра больше площади поперечного сечения якоря электромагнита, отличающийся тем, что шток пневмоцилиндра размещен коаксиально внутри пружины, установленной между якорем электромагнита и поршнем пневмоцилиндра, при этом на гибкой трубке закреплены датчики контроля положения гибкой трубки относительно корпуса пневмоцилиндра, соединенные с блоком управления манипулятором.
2. Захват по п. 1, отличающийся тем, что в качестве датчиков контроля положения использованы датчики деформации.
3. Захват по п. 1, отличающийся тем, что для стабилизации манжеты держателя в пространстве предусмотрены дополнительные упругие элементы, например пружины.
| СПОСОБ ОЧИСТКИ КАНАДСКОГО БАЛЬЗАМА | 0 |
|
SU195053A1 |
| УСТРОЙСТВО И СПОСОБ ЗАХВАТА, ФОРМОВКИ И УКЛАДКИ ТОНКИХ СТЕКЛЯННЫХ ПАНЕЛЕЙ | 2018 |
|
RU2715162C1 |
| Электромагнитный вакуумный захват | 1979 |
|
SU821378A1 |
| CA 2052259 A1, 27.03.1992. | |||
