(/
С

| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1981 |
|
SU1558844A1 |
| Вакуумное грузозахватное устройство | 1975 |
|
SU753770A1 |
| Вакуумный захват | 2023 |
|
RU2814161C1 |
| Вакуумный насос | 1988 |
|
SU1684224A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1306881A1 |
| Распределительный кран вакуумного захватного устройства | 1984 |
|
SU1162724A1 |
| Вакуумный электромагнитный захват | 1984 |
|
SU1204538A1 |
| Вакуумное грузозахватное устройство | 1979 |
|
SU931646A1 |
| Вакуумное грузозахватное устройство | 1980 |
|
SU973469A1 |
| Электромагнитный вакуумный захват | 1979 |
|
SU821378A1 |
Изобретение относится к подъемно- транспортной технике, а именно к вакуумным грузозахватным устройствам для захвата и транспортирования тарно-штучных грузов. Целью изобретения является повышение надежности работы, Устройство содержит корпус 1, уплотнительную манжету 2, вакуумобразующие полости 4 и 5, элементы 10 и с ферромагнитным наполнителем и катушки 12, 13 управления. Средняя камера 3 соединена с полостью уплотнительной манжеты, а две боковые снабжены датчиками 6 и 7 перемещений вакуумобразующих элементов. При захвате грузов происходит поочередное переключение элементов 10 и 11 из среднего положения в крайние под действием магнитных полей катушек управления, устраняя потерю вакуума при подсосе воздуха под уплотнение 2. 1ил.
Изобретение относится к подъемно- транспортной технике, а именно к грузозахватным устройствам.
Целью изобретения является повышение надежности работы.
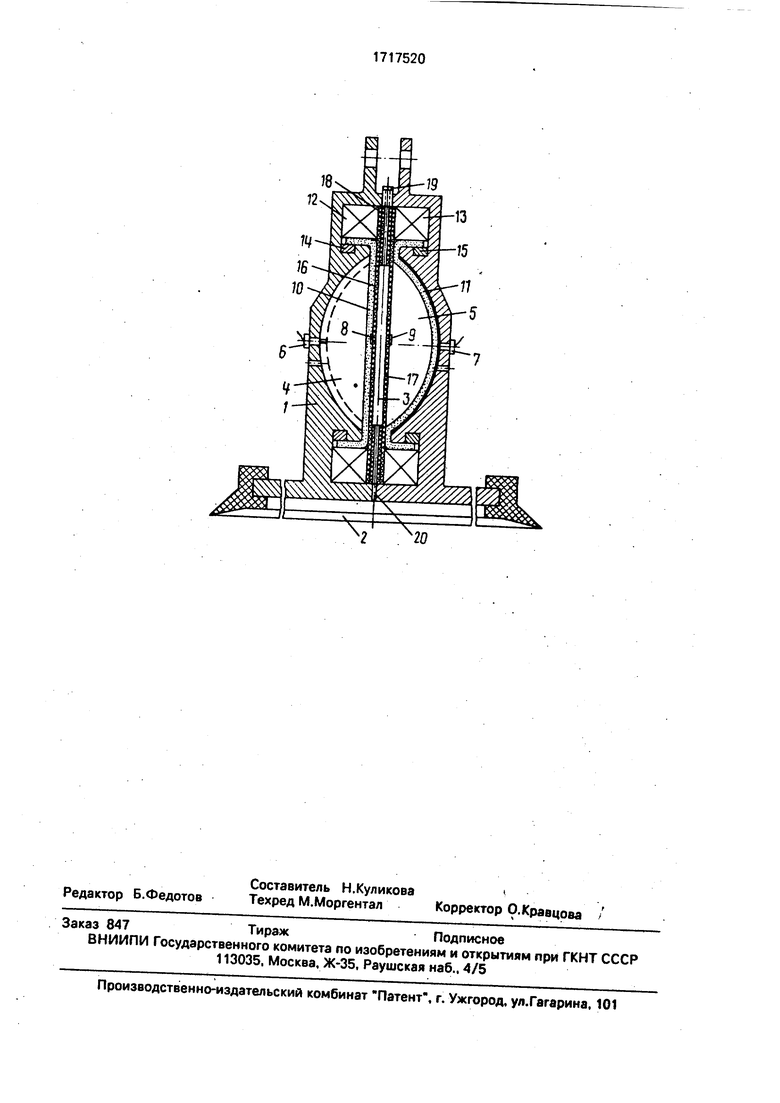
На чертеже приведено продольное сечение устройства.
Грузозахватное устройство содержит корпус 1 из немагнитного материала, состоящий из двух симметричных разъемных частей, на нижней части которых укреплена уплотнительная манжета 2. Внутри корпуса расположены вакуумобразующие полости: средняя 3 в виде диска и две боковые 4 и 5, имеющие полусферические объемы. Стенки боковых полостей 4 и 5 в средней части снабжены конечными выключателями 6 и 7, а также обратными пневматическими клапанами 8 и 9. Вакуумообразующие элементы 10 и 11, представляющие собой гибкие обо- .лочки с ферромагнитным наполнителем, смонтированы симметрично между катушками 12 и 13 управления оболочками и прокладками 14 - 17 из магнитоизолирующего материала. На прокладке 18 установлен управляемый пневматический клапан 19, соединяющий среднюю полость 3 с атмосферой. Полость уплотнительной манжеты сообщена со средней полостью между прокладками воздуховодом 20, образуя с поверхностью захватываемого изделия вакуумную камеру.
Работает грузозахватное устройство следующим образом.
При наложении захвата на груз включается катушка электромагнита 13, и гибкая
сл
N5 О
магнитоуправляемая оболочка 11 отходит вправо, создавая в полости 5, а соответственно и в попости 3 и под уплотнительной манжетой рабочий вакуум. В этом положении груз поднимается и транспортируется. Потери вакуума через уплотнительную манжету компенсируются ходом оболочки, которая в правом крайнем положении воздействует на датчик 7, включающий электромагнит 12 и с выдержкой отключающий электромагнит 13. Вакуум в полости захвата при этом создается оболочкой 10 и не изменяется, возврат оболочки в левое исходное положение происходит за счет остаточного в полости 5 вакуума и упругих свойств оболочки до выравнивания давления до атмосферного в полости 5, которая в это время отсекается от полости 3 обратным клапаном 9.
При достижении оболочкой 10 крайнего левого положения датчиком 6 переключаются электромагниты, и вакуум в захвате начинает создаваться оболочкой 11. Гибкие магнитоуправляемые оболочки 10 и 11 играют роль якоря электромагнита. Гибкость ей придают две образующие оболочку тонкостенные воздухонепроницаемые диафраг- . мы, а магнитоуправляемость - ферромагнитный порошок, расположенный между ними. Девакуумизация захвата и отпускание груза осуществляются управляемым клапаном 19, соединяющим вакуумную камеру с атмосферой.
Увеличение технологических потерь вакуума ведет только к повышению частоты
переключения электромагнитов, обеспечивая постоянно надежную работу захвата. Такая система создания вакуума работает без ограничения времени.
Формула изобретения
Грузозахватное устройство, содержащее полый корпус, смонтированный в полости корпуса вакуумобразующий элемент, представляющий собой гибкую оболочку с ферромагнитным наполнителем, катушку управления оболочкой и уплотнительную манжету, образующую с поверхностью захватываемого изделия вакуумную камеру, сообщенную с полостью корпуса, отличающееся тем, что, с целью повышения надежности работы, оно снабжено смонтированной в полости корпуса симметрично
первой второй гибкой оболочкой с ферромагнитным наполнителем, дополнительной катушкой управления второй гибкой оболочкой, установленными с зазором между собой, гибкими оболочками и катушками
управления прокладками из магнитоизоли- рующего материала, выполненными в средней части с обратными пневматическими клапанами, и смонтированными на стенках корпуса, противолежащих прокладкам, и
электрически соединенными с соответствующими катушками управления конечными выключателями для взаимодействия с гибкими оболочками, при этом полость уплотнительной манжеты сообщена с полостью
между прокладками.
78
12
| Вакуумное грузозахватное устройство | 1982 |
|
SU1085922A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
