Изобретение относится к машиностроению, а именно к манипуляторам, осуществляющим манипуляции предметами в трудных условиях, например в глубоком вакууме, в радиоактивной или агрессивной среде, при высоком давлении.
Целью изобретения является повышение надежности за счет прирощения конструкции.
На фиг. 1 изображен манипулятор, об- тцетй вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Манипулятор содержит основание 1, на котором жестко закреплены основные барабаны 2 и перпендикулярно им дополнительные барабаны 3. Внутри барабанов 2 и 3 расположены ролики 4, установленные с помощью шпонок 5 на валах б приводов 7. К роликам 4 основных барабанов 2 прикреплены концы основных упругих лент 8, имеющих полукруглое сечение, а к роликам 4 дополнительных барабанов прикреплены концы дополнительных упругих лент 9. Противоположные концы упругих лент припаяны на хвостовике рабочего органа 10, что дополнительные упругие ленты 9 проходят внутри контура, образованного основными упругими лентами 8. Ленты 8 и 9 изготовлены из пружинной стали. Барабаны 2 и 3 закрыты защитным кожухом 11с отверстием для выхода упругих лент 8 и 9. Между роликами 4 расположены разделительные стойки 12, на которых установлены направляющие ролики 13.
Манипулятор работает следующим образом.
При включении приводов 7 всех четырех барабанов на размотку упругих лент 8 и 9 все ленты сматываются с роликов 4. Основные упругие ленты 8, проходя между направляющими роликами 13, прижимаются одна к другой и образуют трубчатую механическую руку. Дополнительные упругие ленты 9 проходят внутри трубы, образованной основными упругими лентами 8, и тожз образуют трубу меньшего диаметра. Вращаясь, ролики 4 выталкивают упругие ленты 8 и 9 из защитного кожуха 11, которые после направляющих роликов 13 выдвигаются как единая жесткая трубчатая конструкция.
При обратном ходе приводы 7 вращают ролики 4 вместе с барабанами 2 и 3, на которые наматываются упругие ленты 8 и 9. При этом механическая рука втягивается в кожух 11. Если необходимо придать рабочему органу качательные движения, .то сначала включением всех приводов 7 выдвигают
механическую руку на необходимую величину. Затем в зависимости от плоскости качания включают или приводы основных барабанов 2, или приводы дополнительных
барабанов 3. При этом в каждой паре приводы работают в противоположных направлениях. Например, для придания карательного движения рабочему органу 10 в плоскости, перпендикулярной осям основных барабанов 2, отключают приводы дополнительных барабанов 3, приводы основных барабанов 2 включают один на размотку, а другой - на намотку основных упругих лент 8, Если привод правого барабана 2 работает на намотку, а приводлевого барабана 2 на размотку упругой ленты 8, то механическая рука отклоняется вправо. После отклонения механической руки на необходимую величину направление работы
приводов основных барабанов 2 меняют на противоположное и механическая рука перемещается влево.
Для придания рабочему органу 10 кача- тельного движения в плоскости, перпендикулярной осям дополнительных барабанов 3, отключают приводы основных барабанов 2, включают приводы дополнительных барабанов 3: один на намотку, а другой на размотку дополнительных упругих лент 9.
Направления работы приводов дополнительных барабанов 3 попеременно меняют.
Формула изобретения
1. Манипулятор, содержащий основание,
на котором установлены два барабана с приводами их вращения, механическую руку, образованную двумя гибкими ветвями, одни концы которых соединены с рабочим органом, а доугие - с соответствующими барабанами, и направляющий механизм, отличающийся тем, что, с целью повышения надежности за счет упрощения конструкции, гибкие ветки выполнены в виде упругих лент полукруглого сечения.
2. Манипулятор по п. 1, о т л и ч а ю- щ и и с я тем, что, он снабжен двумя дополнительными барабанами с приводами их вращения и двумя дополнительными упругими лентами полукруглого сечения, при
этом дополнительные барабаны установлены на основании перпендикулярно основным барабанам и дополнительные упругие ленты одним своим концом связаны с соответствующим дополнительным барабаном,
а другие их концы расположены внутри основных упругих лент и закреплены на исполнительном органе.
Л-А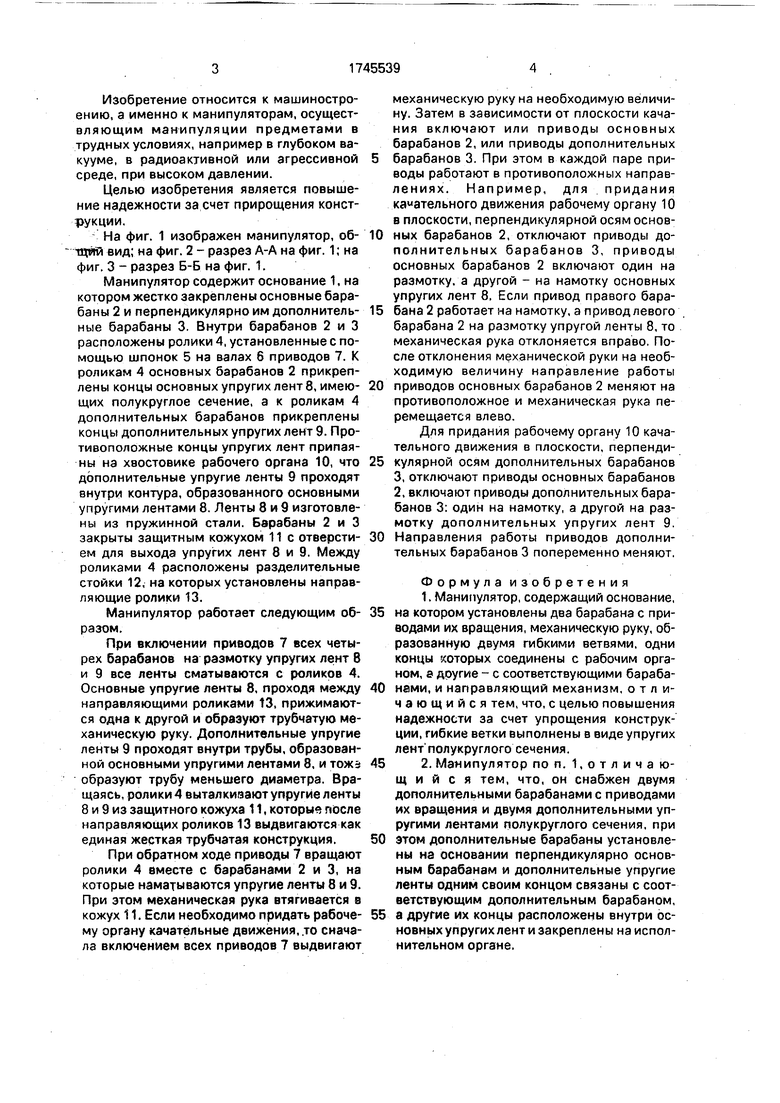
| название | год | авторы | номер документа |
|---|---|---|---|
| НАМОТОЧНАЯ СИСТЕМА И СПОСОБ ДЛЯ НАМОТКИ ЛЕНТЫ | 2018 |
|
RU2758883C2 |
| Исполнительный орган | 2020 |
|
RU2774238C2 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Манипулятор | 1985 |
|
SU1268400A1 |
| КАБЕЛЬНЫЙ БАРАБАН ДЛЯ НАМОТКИ-РАЗМОТКИ СИЛОВОГО КАБЕЛЯ | 2024 |
|
RU2835173C1 |
| Манипулятор | 1988 |
|
SU1576314A1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
| Устройство для обработки ленточного материала | 1985 |
|
SU1378989A1 |
| ИНЕРЦИОННЫЙ БАРАБАН ДЛЯ НАМОТКИ ШЛАНГОВ | 2014 |
|
RU2592621C2 |
Сущность изобретения: при включении приводов барабанов 2, на которых намотаны основные упругие ленты 8 полукруглого сечения, происходит выдвижение или втягивание механической руки, несущей рабочий орган 10. Для повышения- жесткости механической руки она может содержать дополнительные упругие ленты 9, образующие при сматывании трубку, расположенную внутри трубы, образованной основными лентами 8. Поочередное включение барабанов, на которые намотаны упругие ленты, позволяет получить качательные движения механической руки. 1 з.п. ф-лы, 3 ил.
Ф1Г. 2
Ф«г, 3
| Манипулятор | 1985 |
|
SU1268400A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
