Область техники, к которой относится изобретение
Изобретение относится к области транспортных средств, а именно к беспилотному транспортному средству и может быть использовано для перевозки пассажиров на закрытых территориях, в аэропортах, на выставках, предприятиях, парках и т.д.
Уровень техники
Из уровня техники известно техническое решение, в котором предусмотрена система управления автоматизированным управляемым транспортным средством. Система включает в себя путь наведения, управляемое транспортное средство, устройство захвата изображения и операционный блок. Путь наведения направляет транспортное средство. Управляемое транспортное средство движется по маршруту навигации и ориентируется по нему, перемещается в зоне видимости наведения после отклонения от маршрута наведения. Устройство захвата изображения захватывает изображение, связанное с областью управления обзором. Изображение, связанное с областью управления обзором, по меньшей мере, включает в себя изображение области управления обзором. Операционный блок определяет, отклоняется ли управляемое транспортное средство от траектории наведения, и вычисляет информацию о местоположении управляемого транспортного средства в зоне наведения обзора. Когда управляемое транспортное средство отклоняется от маршрута наведения, операционный блок направляет управляемое транспортное средство в соответствии с изображением, связанным с областью наведения (US 9207676 В2, 08.12.2015).
Недостатком данного технического решения является не возможность определения препятствий в слепой зоне устройства захвата изображения, что может привести к созданию аварийной ситуации при передвижении управляемого транспортного средства. Установка устройств захвата изображения, как правило, осуществляется в высшей точке транспортного средства, для обеспечения максимального угла обзора.
Из уровня техники известен беспилотный микроавтобус (шаттл) для перевозки пассажиров. Микроавтобус содержит кузов, смонтированный на раме. В передней и задней частях кузова расположены основной блок аккумуляторов, дополнительные аккумуляторы, электрооборудование и электродвигатель. На лобовом и заднем стеклах установлены по две видеокамеры, а также дополнительно по одной стереокамере Mobileye, которая способна оценивать расстояние до объектов. По периметру кузова установлено шестнадцать сонаров, которые прощупывают пространство вокруг беспилотного микроавтобуса (Знаемский С., статья «НАМИ разработает беспилотный Шаттл», опубликованная 24.08.2016, электронный ресурс Интернета по ссылке - https://autoreview.ru/news/nami-razrabotaet-bespilotnyy-shatl).
Недостатком данного беспилотного микроавтобуса является использование сонаров (парктроников), которые имеют немало слепых зон внизу и пропускают такие объекты, как тонкие столбики или металлические прутья. Сонары могут срабатывать очень выборочно и не замечают предметы, например, натянутые цепи или тросы, а также небольшие предметы ниже метра. Также если неподалеку находится некий объект, отражающий или поглощающий звук, устройство может не среагировать на него. Кроме того, отсутствие видеокамер на боковых панелях корпуса не позволяет устранить слепые зоны, что не обеспечивает возможность безопасного передвижения беспилотного транспортного средства.
Наиболее близким аналогом заявляемого изобретения является роботизированное грузовое транспортное средство, содержащее раму, пассивное и приводное активное шасси, аккумуляторную батарею, инвертор, электродвигатель и редуктор, при этом рама выполнена с вертикально возвышающейся частью, на которой неподвижно закреплен корпус модуля сервисного оборудования, выполненный из радиопрозрачного материала, в передней нижней части корпуса закреплены два ультразвуковых датчика, а в верхней части корпуса на раме закреплен блок оптических стереокамер, направленный по ходу движения, и две очищающие пневмофорсунки, и две очищающие гидрофорсунки, направленные на блок оптических стереокамер, при этом на каждой боковой верхней части корпуса закреплена оптическая камера заднего обзора, направленная под углом от продольной оси роботизированного грузового транспортного средства, а в каждой боковой нижней части корпуса закреплен один ультразвуковой датчик, при этом внутри корпуса закреплен бортовой компьютер управления и контроллер, на задней нижней части рамы закреплен блок оптических стереокамер и два ультразвуковых датчика, а на задней верхней части рамы выполнен защитный выступ для защиты блока оптических стереокамер от загрязнения и повреждений (RU 210916 U1, 13.05.2022).
Роботизированное транспортное средство обеспечивает возможность безопасного передвижения роботизированной грузовой платформы за счет одновременного использования информации, получаемой от блока технического зрения с исключением неверной информации, получаемой от блока технического зрения, обусловленной его загрязнением, и ультразвуковых датчиков. Однако узкий рабочий диапазон пневмофорсунки - изменение давления подачи воды или воздуха на 30-50% может привести либо к запиранию жидкости - жидкость не будет течь через форсунку, либо к отсутствию распыла - жидкость из форсунки будет истекать струей, не распавшись на капли, кроме того имеется вероятность зарастания солями жесткости сопла форсунки, что приведет к неверной информации, получаемой от блока технического зрения и не обеспечит безопасное передвижение транспортного средства.
Раскрытие сущности изобретения
Задачей, на решение которого направлена заявляемое изобретение, является расширение арсенала технических решений в области беспилотных транспортных средств.
Технический результат состоит в достижении заявленной задачи.
Технический результат достигается за счет того, что беспилотное транспортное средство содержит кузов, на котором закреплены видеокамеры, смонтированный на раме приводного шасси, электродвигатель, аккумуляторные батареи и программно-аппаратный комплекс, неподвижно закрепленные на раме, где видеокамеры закреплены на передней и задней верхних частях кузова и направлены вперед и назад, соответственно, на боковых верхних частях кузова по две с каждой стороны, направлены друг на друга и расположены в одной горизонтальной плоскости симметрично относительно продольной плоскости кузова, а также ультразвуковые датчики, установленные в передней и задней нижних частях кузова.
Кроме того, камеры на боковых верхних частях кузова, направленные друг на друга, закреплены под углом, выбранным из интервала 10-50° относительно боковой поверхности кузова.
Кроме того, видеокамеры на передней и задней верхних частях кузов закреплены в одной горизонтальной плоскости по центру относительно боковых сторон кузова.
Кроме того, видеокамеры на передней и задней верхних частях кузов закреплены по одной.
Кроме того, видеокамеры в верхней передней, верхней задней и верхних боковых частях кузова расположены в одной горизонтальной плоскости.
Кроме того, видеокамеры, закрепленные на боковых частях кузова, имеют защитную крышку.
Кроме того, видеокамеры, закрепленные на передней и задней части кузова, расположены внутри кузова.
Кроме того, ультразвуковые датчики установлены по четыре в передней и задней нижних частях кузова.
Кроме того, кузов транспортного средства выполнен из радиопрозрачного материала.
Угол расположения камер на боковых верхних частях кузова (угол отклонения камер относительно боковой поверхности кузова, угол наклона камер относительно горизонтальной плоскости) подбирают и настраивают посредством тестирования и калибровки видеокамер и ультразвуковых датчиков, при этом угол расположения камер зависит от высоты установки камер относительно земли, расстояния между камерами, а также функциональной возможности самой камеры. Предпочтительный угол расположения камер на боковых верхних частях кузова относительно боковой поверхности кузова выбирают из интервала 10-50°. Расположение камер обеспечивает максимальный обзор окружающей обстановки с боковых сторон кузова, частично захватывая участки видимости в передней и задней частях кузова беспилотного транспортного средства.
Камеры, закрепленные в передней и задней верхних частях кузова, направленные вперед и назад, соответственно, предпочтительно расположенные по центру, более предпочтительно по центру по одной, относительно боковых сторон кузова в одной горизонтальной плоскости, обеспечивают максимальный обзор окружающей обстановки перед передней и задней частью, соответственно, беспилотного транспортного средства.
Высоту установки камер относительно земли, а также расстояние между камерами на боковых верхних частях кузова выбирают в зависимости от размера и внешней формы кузова беспилотного транспортного средства, а также функциональной возможности самой камеры.
Применение в устройстве ультразвуковых датчиков, предпочтительно по четыре, установленных в передней и задней нижних частях кузова для контроля слепых зон видеокамер, а именно опорной поверхности в передней и задней части транспортного средства, позволяет существенно повысить безопасность передвижения беспилотного транспортного средства. Ультразвуковые датчики обеспечивают детекцию объектов в непосредственной близости от беспилотного транспортного средства, где находятся слепые зоны видео камер, а по мере удаления от транспортного средства информация поступает от видеокамер, закрепленных в верхней части кузова, где зона действия ультразвуковых датчиков не существенна.
Кузов беспилотного транспортного средства крепится к раме, выполненной в виде конструкции из сваренных между собой металлических труб круглого и/или квадратного и/или прямоугольного профилей.
Кузов беспилотного транспортного средства изготавливают из радиопрозрачного материала (например, стеклопластика и т.п.), что дает возможность установки внутри кузова программно-аппаратного комплекса с беспроводной передачей информации и позволяет осуществлять удаленный контроль, а также диспетчеризацию для управления беспилотным транспортным средством.
Программно-аппаратный комплекс, включающий, бортовой компьютер управления, коммутатор и контролер позволяет вести сбор и анализ данных, поступающих от видеокамер и ультразвуковых радаров в составе беспилотного транспортного средства с целью отслеживания окружающей обстановки и собственного положения, путем детекции и распознавания препятствий, элементов дорожной инфраструктуры (знаков, пешеходных переходов, дорожных блоков и пр.), сегментации дорожного полотна, дедукции дорожной разметки, что позволяет осуществить беспилотное управление транспортным средством.
Контроллер в составе программно-аппаратного комплекса осуществляет контроль и управление узлами беспилотного транспортного средства, предназначенными для подачи бортового электропитания (аккумуляторная батарея), приведения ее в движение (электродвигатель, приводное шасси).
Установка защитных крышек на видеокамерах, закрепленных на боковых верхних частях кузова, а также установка видеокамер на передней и задней части кузова, в частности лобовом и заднем стеклах кузова, внутри кузова обеспечивает защиту видеокамер от внешних загрязнений, например, дождя, грязи, пыли и других загрязнений.
Сущность заявленного изобретения дополнительно поясняется чертежами.
Краткое описание чертежей
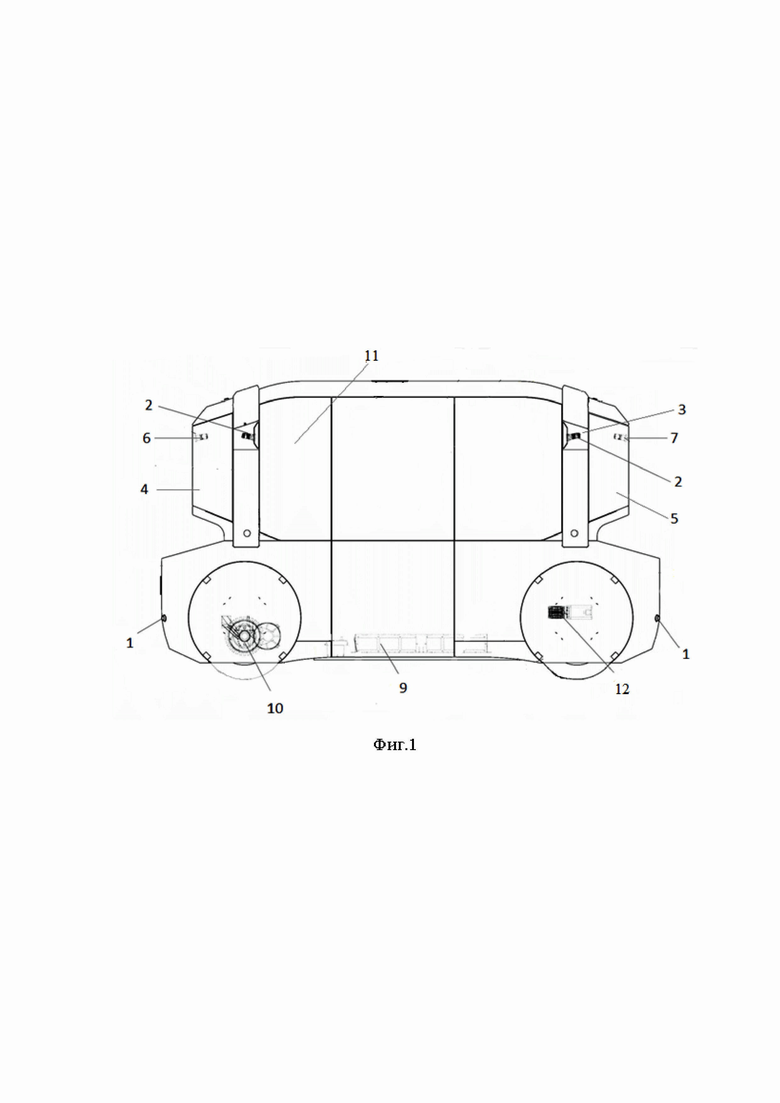
Фиг.1 – вид слева беспилотного транспортного средства.
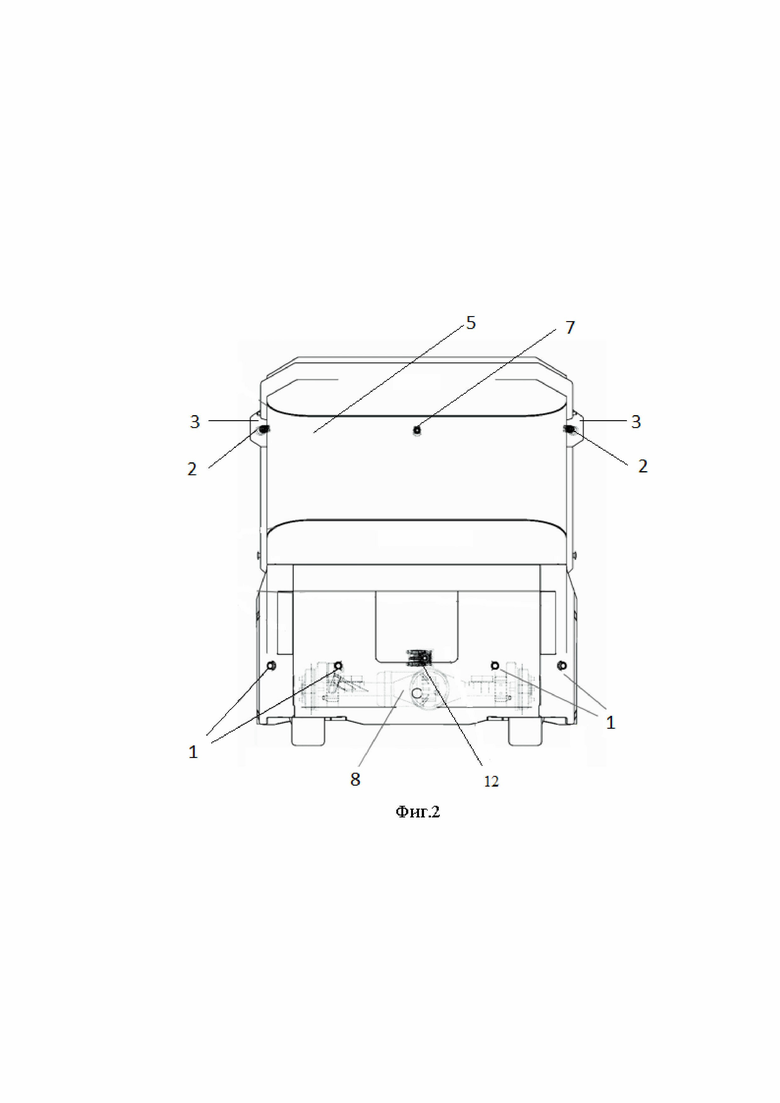
Фиг.2 – вид сзади беспилотного транспортного средства.
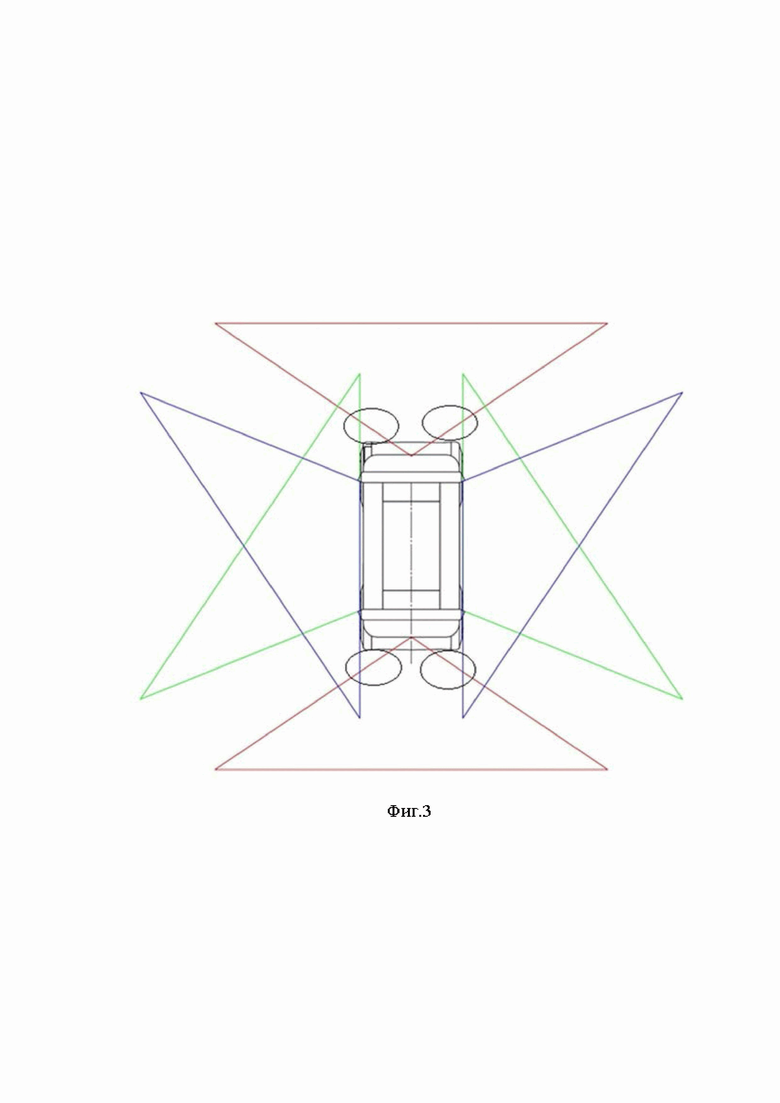
Фиг.3 – схематичный рисунок расположения видеокамер и ультразвуковых датчиков на кузове беспилотного транспортного средства с зонами их обзора.
Осуществление изобретения
В предпочтительном варианте осуществления данного технического решения взаимное расположение узлов беспилотного транспортного средства реализовано следующим образом.
Пример 1:
На раме (не показано) смонтирован кузов 11 беспилотного транспортного средства (см. фиг.1, фиг.2). Восемь ультразвуковых датчиков 1 устанавливают в передней 4 и задней 5 нижних частях кузова по четыре с каждой стороны. На боковых верхних частях кузова закрепляют по две видеокамеры 2, расположенные в одной горизонтальной плоскости симметрично относительно продольной плоскости кузова, направленные друг на друга под углом 25° относительно боковой поверхности кузова. В передней 4 верхней части кузова и задней 5 верхней части кузова закреплены по одной видеокамере 6,7, направленные вперед и назад, соответственно, которые расположены по центру относительно боковых сторон кузова и в одной горизонтальной плоскости с видеокамерами на боковых верхних частях кузова. Видеокамеры, закрепленные на боковых частях кузова, имеют защитную крышку 3. Видеокамеры 6,7, закрепленные на передней 4 и задней 5 верхних частях кузова, расположены внутри кузова.
Электродвигатель 8, аккумуляторная батарея 9 и приводное шасси 10, закреплены на раме (не показано), где электродвигатель 8 расположен на раме (не показано) внутри задней нижней части кузова 11, а аккумуляторная батарея 9 на раме (не показано) под полом в центре кузова. Программно-аппаратный комплекс 12, включающий бортовой компьютер управления, коммутатор и контролер, расположенный внутри нижней задней части кузова 11 и закреплен на раме (не показано). Кузов 11 транспортного средства выполнен из радиопрозрачного материала.
На фиг.3 показан схематичный рисунок расположения видеокамер и ультразвуковых датчиков на кузове беспилотного транспортного средства с совместным использованием минимального набора датчиков и видеокамер. Вокруг беспилотного транспортного средства выделены зоны обзора видеокамер и ультразвуковых датчиков, показывающие обзор окружающей обстановки с боковых сторон кузова и участков видимости в передней и задней частях кузова беспилотного транспортного средства. На фиг.3 обозначены цветными линиями зоны обзора, где 
Угол обзора каждой видеокамеры составляет 112°, что обеспечивает полный обзор вокруг транспортного средства 360°. Ультразвуковые датчики контролируют слепые зоны видеокамер, обеспечивая детекцию объектов в непосредственной близости от транспортного средства, что позволяет существенно повысить безопасность передвижения беспилотного транспортного средства.
Взаимное расположение элементов конструкции заявляемого изобретения, а именно высота, равноудаленность и направленность под углом видеокамер и ультразвуковых радаров обеспечивает максимальный обзор 360° вокруг беспилотного транспортного средства, что позволяет устранить так называемые слепые зоны, присущие беспилотным транспортным средствам и повышает безопасность передвижения беспилотного транспортного средства.
Таким образом, заявленное беспилотное транспортное средство расширяет арсенал технических решений в области беспилотных транспортных средств, улучшает безопасность передвижения беспилотного транспортного средства за счет одновременного использования информации, получаемой от совместного использования видеокамер и ультразвуковых датчиков, как на закрытых (аэропортах, выставок, предприятий и т.д.) территориях, так и открытых (парках и т.д.) территориях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| ПОДВИЖНОЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ "ЗВЕРОБОЙ-М" | 2014 |
|
RU2563699C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| СИСТЕМА ДЛЯ УМЕНЬШЕНИЯ СЛЕПОЙ ЗОНЫ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2707496C1 |
| МОБИЛЬНЫЙ ПРОЖЕКТОРНЫЙ КОМПЛЕКС "ГЕЛИОС" | 2008 |
|
RU2381116C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| СПОСОБ И БЛОК УПРАВЛЕНИЯ ДЛЯ ЗАДНЕГО ОБЗОРА | 2017 |
|
RU2706757C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| МАЛОГАБАРИТНОЕ АВТОТРАНСПОРТНОЕ СРЕДСТВО "СУПЕРКОМПАКТ" | 1994 |
|
RU2081758C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
Изобретение относится к области транспортных средств, а именно к беспилотному транспортному средству. Беспилотное транспортное средство содержит кузов, на котором закреплены видеокамеры, электродвигатель, аккумуляторные батареи и программно-аппаратный комплекс, неподвижно закрепленные на раме. Видеокамеры закреплены на передней и задней верхних частях кузова и направлены вперед и назад. На боковых верхних частях кузова закреплены по две видеокамеры с каждой стороны, направленные друг на друга и расположенные в одной горизонтальной плоскости симметрично относительно продольной плоскости кузова. В передней и задней нижних частях кузова установлены ультразвуковые датчики. Достигается расширение арсенала технических решений в области беспилотных транспортных средств. 8 з.п. ф-лы, 3 ил.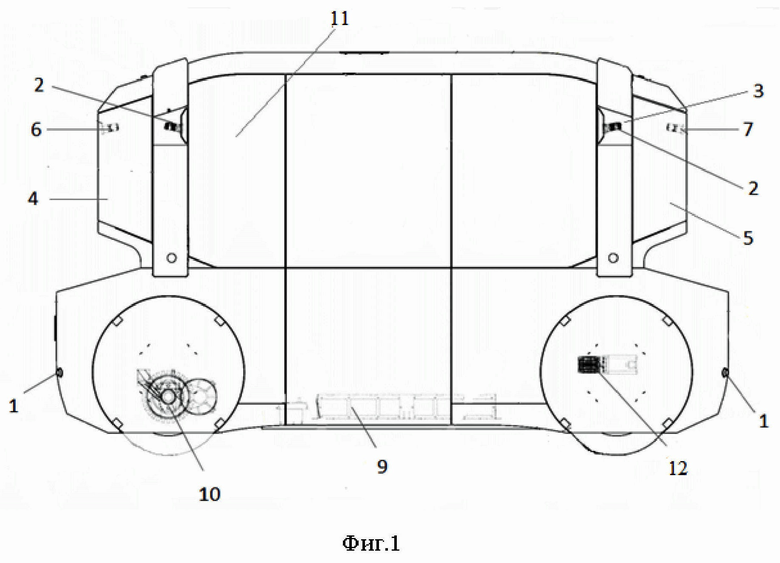
1. Беспилотное транспортное средство, содержащее кузов, на котором закреплены видеокамеры, смонтированный на раме приводного шасси, электродвигатель, аккумуляторные батареи и программно-аппаратный комплекс, неподвижно закрепленные на раме, отличающееся тем, что видеокамеры закреплены на передней и задней верхних частях кузова и направлены вперед и назад, соответственно, на боковых верхних частях кузова по две с каждой стороны, направлены друг на друга и расположены в одной горизонтальной плоскости симметрично относительно продольной плоскости кузова, а также ультразвуковые датчики, установленные в передней и задней нижних частях кузова.
2. Беспилотное транспортное средство по п.1, отличающееся тем, что камеры на боковых верхних частях кузова, направленные друг на друга, закреплены под углом, выбранным из интервала 10-50° относительно боковой поверхности кузова.
3. Беспилотное транспортное средство по п.1, отличающееся тем, что видеокамеры на передней и задней верхних частях кузов закреплены в одной горизонтальной плоскости по центру относительно боковых сторон кузова.
4. Беспилотное транспортное средство по п.3, отличающееся, что видеокамеры на передней и задней верхних частях кузов закреплены по одной.
5. Беспилотное транспортное средство по пп.1-4, отличающееся тем, что видеокамеры в верхней передней, верхней задней и верхних боковых частях кузова расположены в одной горизонтальной плоскости.
6. Беспилотное транспортное средство по пп.1, 2, отличающееся тем, что видеокамеры, закрепленные на боковых частях кузова, имеют защитную крышку.
7. Беспилотное транспортное средство по пп.3, 4, отличающееся тем, что видеокамеры, закрепленные на передней и задней частях кузова, расположены внутри кузова.
8. Беспилотное транспортное средство по п.1, отличающееся тем, что ультразвуковые датчики установлены по четыре в передней и задней нижних частях кузова.
9. Беспилотное транспортное средство по п.1, отличающееся тем, что кузов транспортного средства выполнен из радиопрозрачного материала.
| US 2017248963 A1, 31.08.2017 | |||
| US 2017315552 A1, 02.11.2017 | |||
| US 20391757 A1, 17.12.2020 | |||
| CN 208897202 U, 24.05.2019 | |||
| EP 4261113 A1, 18.10.2023 | |||
| ИНДУКТИВНЫЙ БЕСКОНТАКТНЫЙ ПОТЕНЦИОМЕТР-СЕЛЬСИН | 0 |
|
SU210916A1 |

