Изобретение относится к шагающим транспортным средствам повышенной проходимости и может быть использовано в самоходных многоопорных транспортных средствах.
Известны шагающие опоры для многоопорных самоходных машин и для транспортных средств повышенной проходимости, выполненные в виде шагающей опоры, содержащей несущий корпус, на котором с каждого борта установлены по два шагающих движителя, выполненных в виде шарнирных четырехзвенников лямбдаобразного типа и снабженных общим башмаком, а также силовой привод и самоблокирующийся межосевой дифференциал (патент РФ N 2063353, кл. B 63 D 57/032, 1996).
Недостатками данных шагающих опор являются невысокая проходимость из-за низких тягово-сцепных свойств, значительные габаритные размеры, обусловленные размерами громоздкого общего башмака, необходимого для обеспечения низкого удельного давления на грунт и довольно сложная в конструктивном отношении межбортовая дифференциальная связь, предназначенная для обеспечения равномерности движения и снижения вертикальных колебаний корпуса, обусловленных использованием шагающих движителей лямбдаобразного типа.
Наиболее близким по техническому уровню и достигаемому результату является устройство в виде шагающей опоры для транспортных средств повышенной проходимости (патент РФ N 2063354, кл. B 62 D 57/033, 1996). Шагающая опора содержит несущий корпус, на котором с каждого борта установлены по два шагающих движителя, выполненных в виде шарнирных четырехзвенников лямбдаобразного типа и снабженных общим башмаком, а также силовой привод, кинематически связанный с кривошипами шагающих движителей.
Недостатками данной шагающей опоры являются невысокая проходимость из-за невысоких тягово-сцепных свойств, недостаточно низкого удельного давления на грунт, слабой адаптации к неровностям грунта и небольшой высоты подъема опорных точек башмака, значительные габаритные размеры из-за громоздкого общего башмака, необходимого для снижения удельного давления на грунт, а также неравномерность прямолинейного движения и вертикальные колебания корпуса, обусловленные использованием шагающих движителей лямбдаобразного типа.
Данная шагающая опора имеет сравнительно невысокий технический уровень, что обусловлено расположением шагающих движителей с двух бортов (поперечная компоновка шагающих движителей) с одним общим башмаком с каждого борта, расположенным параллельно продольной оси корпуса. Это увеличивает габаритную ширину многоопорных транспортных средств с такими шагающими опорами и ограничивает возможности их использования из-за сложности транспортировки к месту работы автомобильным и железнодорожным транспортом. Наличие общих башмаков, длина которых ограничена размерами корпуса шагающей опоры, лишает шагающую опору возможности адаптироваться к неровностям грунта, не позволяет обеспечить достаточно низкое удельное давление на грунт. Продольное расположение башмаков не обеспечивает хороших тягово-сцепных свойств. По этой причине, а также из-за малой высоты подъема опорных точек шагающего движителя проходимость транспортного средства с такими шагающими опорами сравнительно невысока. Кроме того, опора образует сплошную колею, нежелательную на экологически ранимом почвенном покрове.
В этой связи важнейшей задачей является создание новой системы взаимодействия шагающих движителей, установленных по одному борту шагающей опоры (продольная компoновка шагающих движителей) с перекрытием рабочих опорных поверхностей движителей, с лыжеобразными башмаками, обеспечивающими низкое удельное давление на грунт, повышенные тягово-сцепные свойства, дискретную колею, улучшенную адаптацию шагающей опоры к неровностям грунта и повышенную проходимость за счет возможности преодолевания препятствий, превосходящих по высоте величину подъема опорных точек шагающих движителей. Такая шагающая опора обеспечит многоопорному транспортному средству малые габариты, повышенную проходимость и возможность работы на экологически ранимых грунтах.
Техническим результатом заявленной конструкции шагающей опоры является создание новой системы взаимодействия блока продольно скомпoнованных и кинематически взаимосвязанных шагающих движителей, установленных по одному борту корпуса шагающей опоры со сдвигом по фазе между собой, с новым расположением башмаков лыжеобразной формы, обеспечивающим низкое удельное давление на грунт и повышенные тягово-сцепные свойства, и новым механизмом подъема носка башмака на заключительном этапе фазы переноса. Все это позволит повысить проходимость транспортного средства с шагающей опорой и даст возможность работать на экологически ранимых грунтах.
Указанный технический результат достигается тем, что шагающая опора для транспортных средств повышенной проходимости, содержащая корпус с установленными на нем шагающими движителями, выполненными в виде шарнирных четырехзвенников, содержащих криволинейные опоры, снабженные башмаками, шарнирно связанные с кривошипами и с качающимися рычагами, свободные концы которых шарнирно соединены с корпусом, а также имеет силовой привод, кинематически связанный с кривошипами шагающих движителей, выполнена в виде блока шагающих движителей, кинематически взаимосвязанных и шарнирно установленных со сдвигом по фазе на четверть оборота кривошипа шагающего движителя по одному борту корпуса, выполненного в виде полой несущей балки, кривошипы шагающих движителей жестко закреплены на осях, расположенных перпендикулярно продольной оси корпуса, снабженных дополнительными кривошипами, кинематически связанных посредством общего шатуна, причем расстояния между осями шагающих движителей выбираются из условия обеспечения перекрытия рабочих опорных поверхностей башмаков в продольном направлении, а башмаки, выполненные лыжеобразной формы, установлены под углом к продольной оси по одному борту корпуса, и каждый башмак снабжен механизмом подъема носка башмака в фазе переноса шагающего движителя, выполненного в виде шарнира повышенного трения, связывающего башмак с криволинейной опорой.
Предложенная новая плотная продольная компoновка блока шагающих движителей позволяет снизить габаритную ширину транспортного средства с предложенными шагающими опорами, новая взаимосвязь шагающих движителей снижает неравномерность прямолинейного передвижения и вертикальные колебания корпуса за счет использования в качестве рабочего участок траектории опорной точки шагающих движителей, практически горизонтальный и с равномерным движением точки, а общий шатун шагающих движителей, установленных со сдвигом по фазе, позволяет взаимно компенсировать силы инерции, возникающие при разгоне и торможении шагающих движителей в каждом цикле.
Расположение лыжеобразных башмаков под углом к продольной оси корпуса с перекрытием рабочих опорных зон в продольном направлении позволяет по-новому решить проблему уменьшения удельного давления на грунт за счет увеличения общей длины башмаков, которые могут в несколько раз превышать длину корпуса шагающей опоры, обеспечивает высокие тягово-сцепные свойства и дискретность колеи, что позволяет транспортному средству с такими шагающими опорами эффективно работать на слабых и экологически ранимых грунтах.
Введение в шагающую опору нового дополнительного механизма подъема носка башмака на заключительном этапе фазы переноса шагающего движителя дает возможность шагающей опоре при движении вперед или задним ходом преодолевать препятствия высота которых превышает величину подъема опорных точек шагающего движителя.
Проведенный заявителем анализ уровня техники, включающий поиск по патентам и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа как наиболее близкого по совокупности признаков аналога позволил выявить совокупность существенных по отношению к усматриваемому техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию уровня заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень".
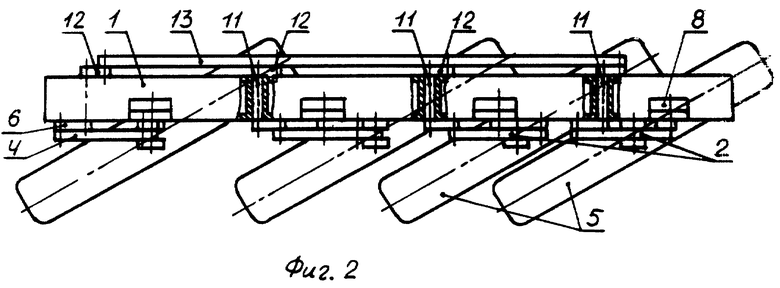
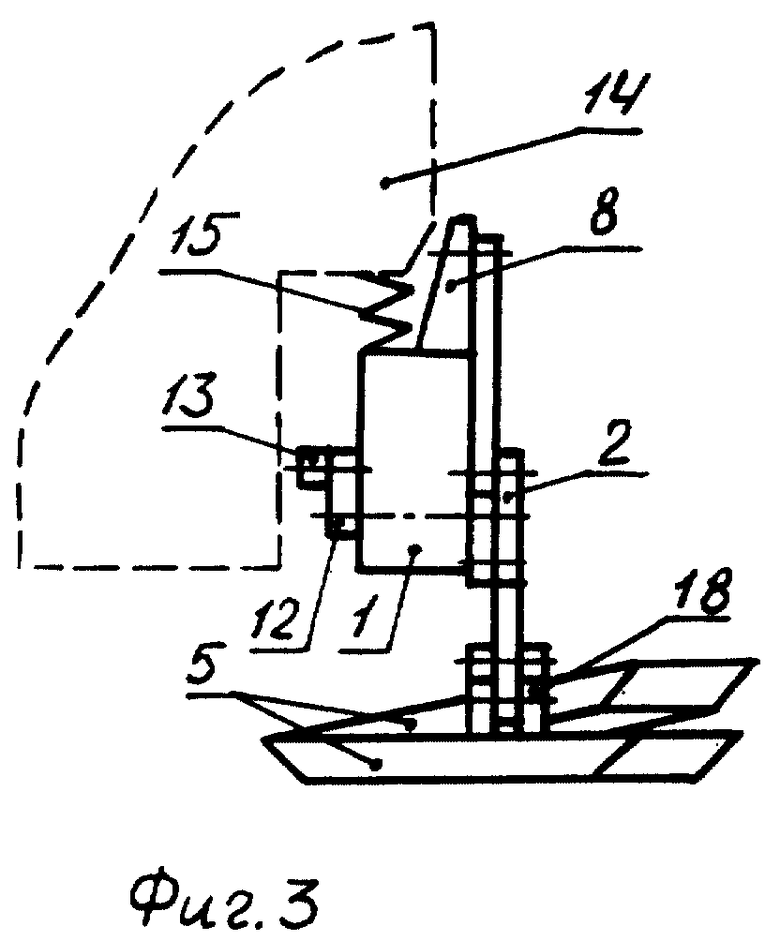
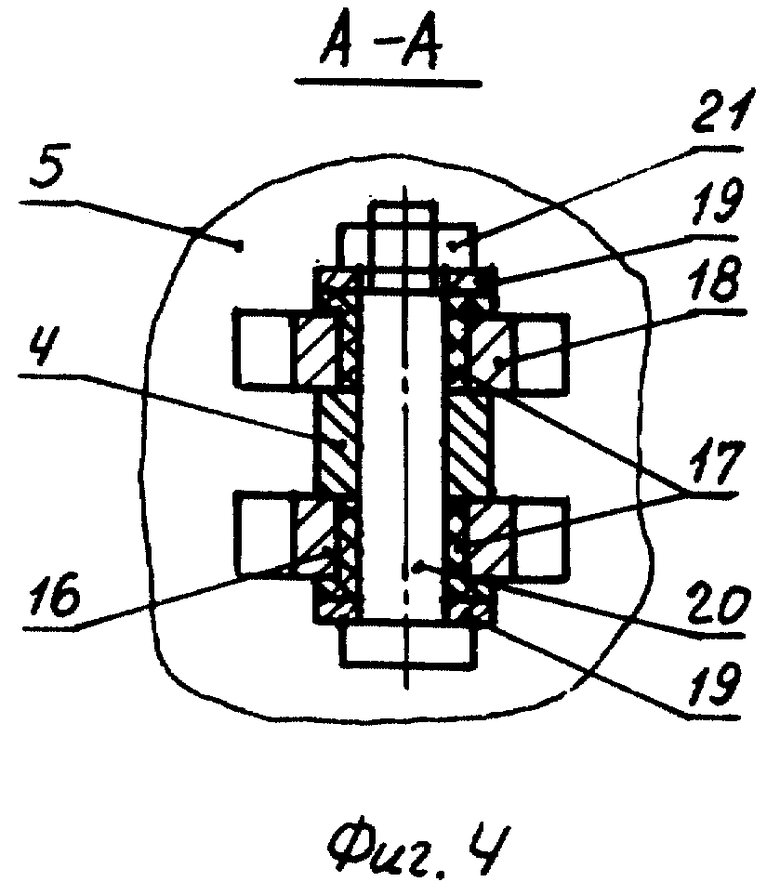
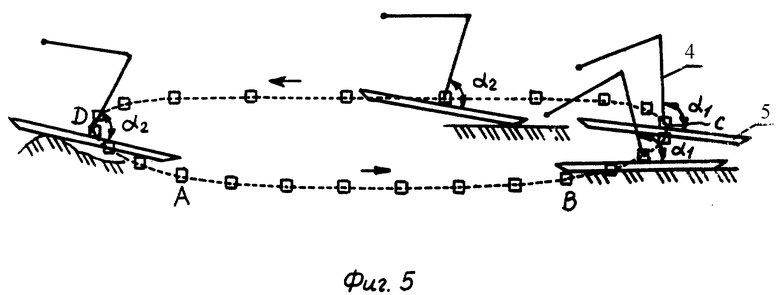
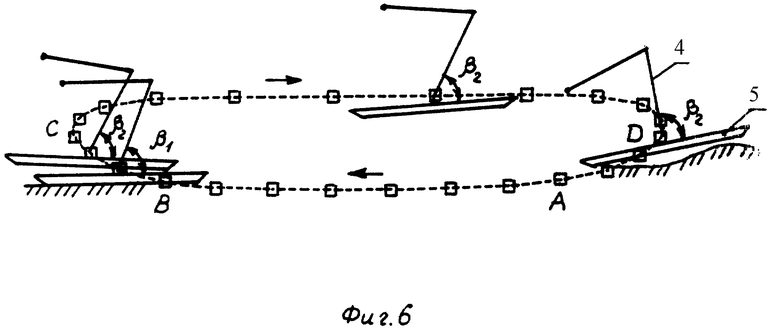
На фиг. 1 представлен общий вид шагающей опоры; на фиг. 2 - вид в плане; на фиг. 3 - вид слева на шагающую опору; на фиг. 4 - увеличенный разрез по А-А (фиг. 1); на фиг. 5 - траектория опорных точек шагающих движителей и положение башмаков на ее характерных участках при движении шагающей опоры вперед; на фиг. 6 - траектория опорных точек шагающих движителей и положение башмаков на ее характерных участках при движении шагающей опоры задним ходом.
Шагающая опора для транспортных средств повышенной проходимости содержит корпус 1 с установленными на нем шагающими движителями 2, объединенными в единый кинематически взаимосвязанный блок, и силовой привод 3 (фиг. 1,2). Шагающие движители 2 выполнены в виде шарнирных четырехзвенников лямбдаобразного типа, содержат криволинейные опоры 4, снабжены башмаками 5 и шарнирно соединены с кривошипами 6 и качающимися рычагами 7. Свободные концы качающихся рычагов 7 шарнирно закреплены на кронштейнах 8, установленных на корпусе 1. Силовой привод 3 может включать в себя тяговый электродвигатель 9 с бортовым редуктором 10 или иметь другие примеры выполнения. Силовой привод 3 через бортовой редуктор 10 кинематически связан с кривошипами 6 шагающих движителей 2.
Шагающие движители 2 кинематически взаимосвязаны и шарнирно установлены по одному борту корпуса 1, выполненного в виде полой несущей балки, со сдвигом по фазе между собой на четверть оборота кривошипа 6. Установка шагающих движителей 2 по одному борту корпуса существенно уменьшает габаритную ширину шагающей опоры, что дает возможность ее транспортировки к месту работы автомобильным и железнодорожным транспортом. Предложенная новая взаимосвязь шагающих движителей 2 снижает неравномерность прямолинейного движения и сводит к минимуму вертикальные колебания корпуса, обусловленные самим принципом шагающего способа передвижения. Кривошипы 6 шагающих движителей жестко закреплены на осях 11, расположенных перпендикулярно продольной оси несущей балки корпуса 1. Оси 11 снабжены дополнительными кривошипами 12 и для взаимной компенсации сил инерции в шагающих движителях 2 при их разгоне и торможении в каждом цикле кинематически связаны между собой посредством общего шатуна 13.
Расстояния между осями 11 соседних шагающих движителей 2 выбраны для более плотной компоновки шагающей опоры из условия обеспечения перекрывающихся рабочих опорных поверхностей башмаков 5 в продольном направлении. Башмаки 5, выполненные лыжеобразной формы, для обеспечения нормальной работы без задевания друг о друга и для улучшения тягово-сцепных свойств шагающей опоры расположены под углом к продольной по одному борту оси корпуса 1.
Для крепления к корпусу транспортного средства 14 (фиг. 3) шагающая опорa снабжена подвеской, включающей упругие элементы системы подрессоривания 15, обеспечивающие как минимум две точки опоры на грунт. Это в совокупности с шарнирной связью шагающих движителей 2 с независимыми башмаками 5 повышает возможности шагающей опоры по адаптации к неровностям грунта.
Каждый башмак 5 снабжен механизмом подъема носка башмака 5 в фазе переноса шагающего движителя 2, выполненного в виде шарнира повышенного трения 16, связывающего башмак 5 с криволинейными опорами 4. Это позволяет шагающей опоре преодолевать препятствия, высота которых превышает величину подъема опорной точки шагающего движителя 2. Шарнир повышенного трения 16 (фиг. 4) содержит втулки подшипников скольжения 17, жестко установленные в проушинах 18 башмаков 5, шайбы 19, образующие пары трения с торцами втулок подшипников скольжения 17, резьбовый палец 19, запрессованный в отверстие криволинейной опоры 4, связывающий ее через втулки подшипников скольжения 17 с проушинами 18 башмака 5, и гайки 20, усилие затяжки которых определяет величину момента трения в шарнире в процессе переноса шагающих движителей 2. Шарнир повышенного трения 16 может иметь и другие примеры выполнения.
Шагающая опора для транспортных средств повышенной проходимости работает следующим образом. После включения силового привода 3 (фиг. 1) крутящий момент от тягового электродвигателя 9 через бортовой редуктор 10 передается на ось 11 и кривошип 6 первого шагающего движителя 2 (фиг. 1-3) и через дополнительные кривошипы 12 и общий шатун 13 на оси 11 и кривошипы 6 остальных шагающих движителей 2. Поскольку шагающие движители 2 установлены на корпусе 1 со сдвигом по фазе между собой на четверть оборота кривошипа 6, то их общая кинематическая взаимосвязь посредством общего шатуна 13 обеспечивает взаимную компенсацию сил инерции при разгоне и торможении шагающих движителей 2 в каждом цикле. Кривошипы 6 шагающих движителей 2 начинают вращаться и приводят в движение криволинейные опоры 4 и качающиеся рычаги 7, тем самым осуществляя движение шагающих движителей 2. Благодаря взаимодействию башмаков 5 шагающих движителей 2 с грунтом шагающая опора начинает движение.
При движении шагающей опоры шагающие движители 2 последовательно совершают рабочий цикл, включающий рабочий ход, соответствующий участку AB траектории опорной точки (фиг. 5, 6), фазу переноса, соответствующую участку СD траектории и два переходных участка BC и DA, соответствующие выходу башмаков 5 из зацепления с грунтов и входу в фазу опоры на грунт. При движении шагающая опора из-за связи с корпусом 14 (фиг. 3) посредством упругих элементов системы подрессоривания 15 опирается на грунт как минимум двумя башмаками 5, что в совокупности с возможностью поворота башмаков 5 вокруг шарнира повышенного трения 16 повышает ее возможности по адаптации к неровностям грунта.
Каждую четверть цикла дальнейшей работы шагающей опоры можно подразделить на следующие четыре основные стадии:
- первый шагающий движитель 2 находится в фазе опоры на грунт в начале рабочего участка AB траектории опорной точки (фиг. 5 - при движении вперед и фиг. 6 - при движении задним ходом), второй - в конце фазы опоры на грунт, приближается к точке B траектории и совместно с первым шагающим движителем 2 осуществляет рабочий ход, третий и четвертый - движутся по участку СD и находятся соответственно в конце и начале фазы переноса;
- первый шагающий движитель продолжает находиться в фазе опоры на грунт, второй - проходит точку B траектории и начинает выходить из зацепления с грунтом, продолжая совместно с первым шагающим движителем осуществлять рабочий ход, третий - продолжает движение по участку СD траектории и находится в фазе переноса, четвертый шагающий движитель 2 проходит точку D траектории и начинает входить в контакт с грунтом;
- первый шагающий движитель продолжает находиться в фазе опоры на грунт, и его опорная точка движется по участку AB траектории, второй - проходит точку C траектории и вышел из зацепления с грунтом, третий - продолжает движение по участку CD траектории и находится в середине фазы переноса, четвертый - движется по участку DA траектории, входит в зацепление с грунтом и начинает совместно с первым шагающим движителем 2 осуществлять рабочий ход;
- первый шагающий движитель продолжает находиться в фазе опоры на грунт и приближается к точке B рабочего участка AB, второй и третий шагающие движители 2 движутся по участку CD траектории и находятся соответственно в начале и конце фазы переноса, четвертый находится в фазе опоры на грунт, обеспечивает совместно с первым шагающим движителем 2 рабочий ход и достигает точки A траектории.
После достижения опорной точки четвертого шагающего движителя точки A траектории начинается вторая четверть рабочего цикла, аналогичная первой. При этом первый шагающий движитель меняется местами с четвертым, второй - с первым и третий - со вторым.
Подобный новый рабочий цикл шагающей опоры позволяет подобрать в качестве рабочего участок AB траектории, практически горизонтальный и с равномерным движением опорной точки (см. фиг. 5, 6, где точки на траектории расставлены через равные промежутки времени). Это приближает движение шагающей опоры к равномерному, а также сводит к минимуму вертикальные перемещения корпуса в каждом цикле движения.
При движении шагающей опоры рабочие опорные поверхности соседних башмаков 5 перекрываются в продольном направлении, но, т.к. башмаки 5 расположены под углом к продольной оси корпуса 1, то нарушение нормальной работы за счет их задевания друг о друга исключено. Такое расположение башмаков 5 позволяет, не увеличивая габариты шагающей опоры, увеличить в несколько раз общую длину башмаков и снизить удельное давление на грунт, обеспечить дискретность колеи и повысить тягово-сцепные свойства шагающей опоры за счет большей площади сцепления с грунтом. Это повышает возможности шагающей опоры по проходимости на грунтах с низкой несущей способностью и дает ей возможность работать на экологически ранимом почвенном покрове.
Каждый башмак 5 снабжен дополнительным механизмом подъема носка башмака в фазе переноса шагающего движителя 2, выполненным в виде шарнира повышенного трения 16 (фиг. 4). Механизм работает следующим образом. При выходе башмака 5 (фиг. 5) из фазы опоры на грунт, участок BC траектории, он расположен под углом α1 к криволинейной опоре 4. В дальнейшем в фазе переноса (участок CD траектории) башмак 5 находится в положении безразличного равновесия, и в общем случае из-за неравномерного налипания грунта и тому подобных причин может принимать случайное положение. Но ввиду наличия шарнира повышенного трения 16, момент трения которого препятствует в фазе переноса повороту башмака вокруг своей оси, угол α1 сохраняется, и носок башмака 5 при переносе (см. фиг. 5) всегда приподнят.
Момент трения в шарнире повышенного трения 16 можно регулировать затяжкой гайки 21, определяющей усилие в дополнительной паре трения, образованной шайбой 19 с торцами втулок подшипников скольжения 17. Момент трения целесообразно выбирать сравнительно небольшим, исключающим случайный поворот башмака 5 в фазе переноса, но не вносящим дополнительных существенных потерь в рабочий процесс. В фазе опоры на грунт вся нагрузка от транспортного средства приходится на основную пару трения в шарнире - на втулки подшипников скольжения 17 и резьбовый палец 20. При этом момент трения в дополнительной паре трения не растет, и потери на трение в шарнире повышенного трения 16 не увеличиваются.
Если у шагающей опоры при сравнительно малой высоте подъема опорных точек шагающего движителя 2 башмаки 5 повышенной длины, то в начале фазы переноса возможен контакт пятки башмака 5 с грунтом, и башмак 5 повернется против часовой стрелки. Угол α1 уменьшится до α2, но и в этом случае носок башмака 5 в фазе переноса будет приподнят. После окончания фазы переноса на участке DA траектории башмак 5 опускается на грунт с приподнятым носком, что позволяет шагающей опоре преодолевать препятствия, высота которых превышает величину подъема опорных точек шагающего движителя 2. Это повышает проходимость шагающей опоры.
Аналогично механизм подъема носка башмака 5 работает и при движении задним ходом (фиг. 6). В этом случае поворот башмака от угла β1, соответствующего выходу из фазы опоры на грунт, до угла β2 происходит на участке BC траектории при выходе из зацепления с грунтом за счет контакта носка башмака 5 с грунтом (из зацепления с грунтом выходит сначала пятка, а потом носок башмака 5).
После завершения рабочего цикла, шагающей опоры он повторяется.
Таким образом, вышеуказанные сведения свидетельствуют о выполнении при использовании изобретения следующей совокупности условий:
шагающая опора для транспортных средств повышенной проходимости предназначена для применения в многоопорных транспортных и транспортно-технологических средствах, работающих на экологически ранимых и с низкой несущей способностью грунтах, причем новая взаимосвязь шагающих движителей и новое расположение башмаков с дополнительным механизмом подъема носка башмака обеспечивают низкое удельное давление на грунт, высокую проходимость и дискретную колею;
для заявленного изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью вышеописанных конструктивных решений и способов применения;
шагающая опора для транспортных средств повышенной проходимости, воплощенная в заявленном изобретении, при его осуществлении способна обеспечить достижениe усматриваемого заявителем технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость".
Изобретение относится к транспортной технике и касается создания самоходных многоопорных транспортных средств повышенной проходимости. Опора имеет корпус с шагающими движителями в виде шарнирных четырехзвенников, содержащих криволинейные опоры с башмаками, шарнирно связанные с кривошипами и качающимися рычагами. Свободные концы рычагов соединены шарнирно с корпусом. Кривошипы движителей кинематически связаны с силовым приводом. Опора выполнена в виде блока шагающих движителей, кинематически связанных друг с другом и шарнирно установленных со сдвигом по фазе на 1/4 оборота кривошипа движителя по одному борту корпуса. Корпус выполнен в виде полой несущей балки. Кривошипы жестко закреплены на осях. Оси перпендикулярны продольной оси корпуса и имеют дополнительные кривошипы, кинематически связанные общим шатуном. Расстояния между осями шагающих движителей выбраны из условия обеспечения перекрытия рабочих поверхностей башмаков в продольном направлении. Башмаки являются лыжеобразными и установлены под углом к продольной оси по одному борту корпуса. Каждый башмак имеет механизм подъема его носка в фазе переноса шагающего движителя, выполненный в виде шарнира повышенного трения. Шарнир повышенного трения связывает башмак с криволинейной опорой. Технический результат реализации изобретения состоит в обеспечении низкого удельного давления на грунт и возможности работы опоры на экологически ранимых грунтах, а также в повышении тягово-сцепных свойств опоры и проходимости транспортного средства. 6 ил.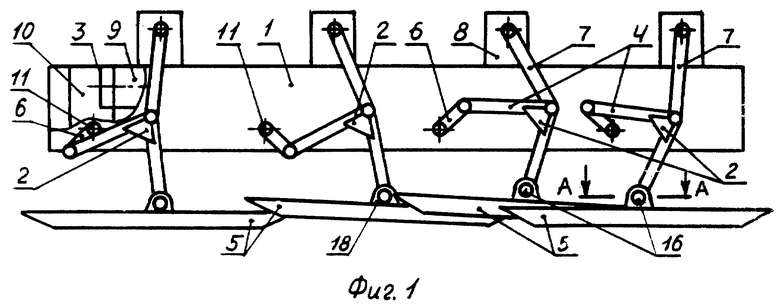
Шагающая опора для транспортных средств повышенной проходимости, содержащая корпус с установленными на нем шагающими движителями, выполненными в виде шарнирных четырехзвенников, содержащих криволинейные опоры, снабженные башмаками, шарнирно связанные с кривошипами и с качающимися рычагами, свободные концы которых шарнирно соединены с корпусом, а также имеет силовой привод, кинематически связанный с кривошипами шагающих движителей, отличающаяся тем, что шагающая опора выполнена в виде блока шагающих движителей, кинематически взаимосвязанных и шарнирно установленных со сдвигом по фазе на четверть оборота кривошипа шагающего движителя по одному борту корпуса, выполненного в виде полой несущей балки, кривошипы шагающих движителей жестко закреплены на осях, расположенных перпендикулярно продольной оси корпуса, снабженных дополнительными кривошипами, кинематически связанных посредством общего шатуна, причем расстояния между осями шагающих движителей выбираются из условия обеспечения перекрытия рабочих опорных поверхностей башмаков в продольном направлении, а башмаки, выполненные лыжеобразной формы, установлены под углом к продольной оси по одному борту корпуса, каждый башмак снабжен механизмом подъема носка башмака в фазе переноса шагающего движителя, выполненного в виде шарнира повышенного трения, связывающего башмак с криволинейной опорой.
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| RU 2063898 C1, 20.07.1996 | |||
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| US 4462476 A, 31.07.1984 | |||
| СПОСОБ ЛЕЧЕНИЯ РАКА ЛЕГКИХ | 2011 |
|
RU2491064C2 |
| US 3034591 A, 15.05.1962 | |||
| DE 19530651 A1, 24.02.1997. | |||
