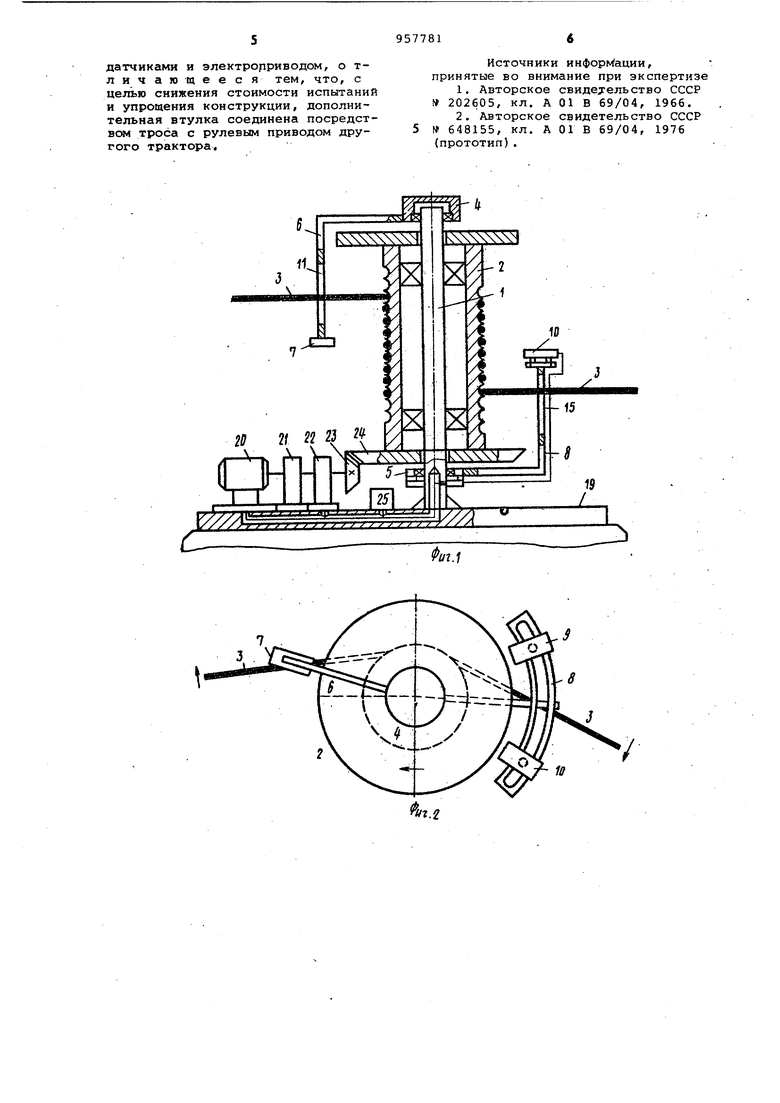
установлены барабан 2 с тросом 3, втулка 4 и дополнительная втулка 5. На втулке 4 закреплен кронштейн 6 с пассивным датчиком 7, а на втулке 5 кронштейн 8 с активными датчиками 9 и 10 (отставания и опережения) . Датчики размещены на уровнях, допускающих возможность их взаимодействия. Трос 3 с одной стороны пропущен через вертикальную прорезь 11, выполненную в кронштейне б,и охватывает шкив 12, связанный с рулевым приводом трактора 13. Конец троса посредством пружины 14 прикреплен к остову трактора, с другой стороны трос 3 пропущен через прорезь 15 в кронштейне 8, охватывает шкив 16, связанный с рулевым приводом трактора 17, и посредством пружины 18 прикреплен к остову этого трактора.
На плите 19, уложенной в центре трека, смонтирован реверсивный шаговый электродвигатель 20, соединенный через многоступенчатый редуктор 21 и электроуправляемую муфту 22 с ведущей шестерней 23, находящейся в зацеплении с ведомой шестерней 24, закрепленной на барабане 2, а такжеблок управления 25, электрически соединенный с электродвига телем, муфтой и датчиками 9 и 10,
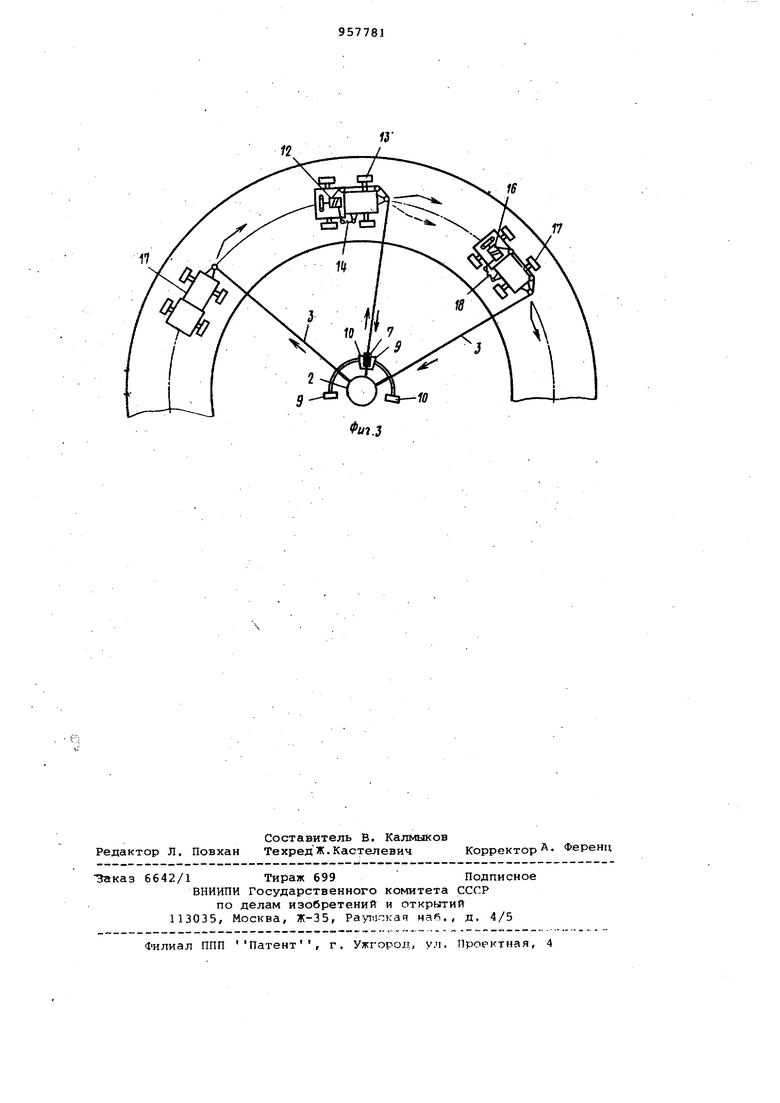
В исходном состоянии оба трактора 13 и 17 движутся по круговой траектории -, совпадающей с осевой линией рабочей дорожки трека. При это реверсивный электродвигатель и электроуправляемая муфта выключены, и барабан 2 свободно вращается на оси 1 под действием окружного усили создаваемого натянутым тросом 3. Датчик 7 удален от датчиков 9 и 10 и не взаимодействует ни с тем, ни с другим.
Поскольку скорости тракторов неизбежно различаются, тракторы в процессе испытания начинают сближаться. Если скорость трактора 13 больше, чем скорость трактора 17, то через некоторое время происходит взаимодействие датчиков 7 и 9. В результате в блок управления 25 от датчика 9 поступает сигнал, под действием которого электроуправляемая муфта 22 включается и соединяет кинематически ведущую шестерню 23 с редуктором 21, а реве1эсивный шаговый электродвигатель 20 поворачивается на заданное число шагов. При этом барабан 2 поворачивается на соответствующий угол против часовой стрелки. Трос 3 перематывается, и под действием пружины 14 рулевое колесо трактора 13 поворачивается и он переходит на параллельную круговую траекторию большого радиуса. Одновременно nor действием пружины 18 поворачивает-.Я рулевое колесо
трактора 17, и он переходит на круговую тpaeкtopию меньшего радиуса. Угловая скорость трактора 13 уменьшается, а трактора 17 - увеличивается, и они начинают расходиться. ТаКИМ образом, столкновение тракторов предотвращается. Датчики 7 и 9 выходят из зоны взаимодействия. Электропривод обесточивается, а барабан вновь свободно вращается
на оси.
В случае, если скорость трактора 13 окажется меньше скорости трактора 17, то при их сближении происходит взаимодействие датчиков 7 и 1C. В результате электропривод включается и поворачивает барабан 2 на заданный угол по часовой стрелке. Трактор 13 переходит на- траекторию меньшего радиуса, а трактор 17 на более удаленную от центра трека. Тракторы начинают расходиться, и опасная ситуация устраняется. Датчики 7 и 10 выходят из зоны взаимодействия, электропривод обесточивается, барабан свободно вращается на оси. I
Таким образом, при сближении
объектов испытания до предельного расстояния появляется командный сигнал, по которому происходит перераспределение длин ветвей троса 3 между тракторами и одновременно их переход на новые круговые траектории, чем обеспечивается безопасность испытаний.
Угол поворота,барабана при отработке команды может регулироваться изменением шага электродвигателя или передаточного числа редуктора. Технико-Э1 номический эффект от
применения предлагаемого устройства состоит в снижении стоимости испытаний, обусловленном уменьшением потребной ширины дорожки трека, упрощением конструкции поворотного устройства и снижением потребления
электроэнергии при одновременном повышении долговечности устройства.
Формула изобретения
Устройство для автоматического вождения тракторов при испытании на треке, содержащее ось, неподвижно закрепленную в центре трека, с шарнирно-установленными на ней барабаном с намотанным на нем тросом,втулкой, соединенной посредством троса с рулевым приводом одного из испытываемых тракторов, и дополнительной втулкой, датчики положения,
закрепленные на упомянутых втулках с возможностью взаимодействия друг с другом, реверсивный электропривод барабана и блок управления, электрически соединенный с упомянутыми
датчиками и электроприводом, отличающееся тем, что, с целью снижения стоимости испытаний и упрощения конструкции, дополнительная втулка соединена посредстBcw троса с рулевым приводом другого трактора.
Источники инфорр« ации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 202605, кл. А 01 В 69/04, 1966.
2.Авторское свидетельство СССР № 648155, кл. А 01 В 69/04, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения тракторов при испытаниях на полигоне | 1976 |
|
SU648155A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ УДАРНОГО БУРЕНИЯ СКВАЖИН | 2021 |
|
RU2766989C1 |
| Устройство для ресурсных испытаний тракторов по кольцевой дорожке | 1985 |
|
SU1303876A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1971 |
|
SU312558A1 |
| Устройство для ресурсных испытаний тракторов на полигоне | 1984 |
|
SU1219950A1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННЫХ ИСПЫТАНИЙ СЕКЦИЙ МНОГООПОРНЫХ ДОЖДЕВАЛЬНЫХ МАШИН ФРОНТАЛЬНОГО И КРУГОВОГО ДЕЙСТВИЯ | 1997 |
|
RU2130175C1 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2008 |
|
RU2404569C2 |