Область техники.
Предлагаемое изобретение относится к контрольно-измерительной технике и может быть использовано при контроле работоспособности турбомашины по осевым перемещениям диаметрально противоположных торцевых периферийных частей вала в качестве одного из каналов системы аварийной защиты.
Уровень техники.
Известен способ контроля работоспособности турбомашины по осевым перемещениям диаметрально противоположных участков торцевой периферийной части вала (авторское свидетельство №SU 1321843 А1 от 07.07.1987 г). Способ включает регистрацию постоянной составляющей, соответствующей осевому перемещению, и переменной, обусловленной биением торцевой периферийной части вала на частоте вращения. В блоке обработки эти сигналы складываются и делятся на два. Таким образом, переменные составляющие сигналов, равные по величине и знаку, но противоположные по фазе, взаимно уничтожаются. Аварийный сигнал на отключение турбомашины формируется при регистрации предельного значения осевого перемещения вала.
Этот способ наиболее близок к заявленному способу, так как также подразумевает регистрацию осевых перемещений в диаметрально противоположных участках торцевой периферийной части вала.
Недостатком рассматриваемого прототипа является исключение из контроля работоспособности турбомашины переменной (динамической) составляющей осевых перемещений ротора (вала), характеризующей изгиб оси вращающегося вала при возникновении и развитии аварийной ситуации, из-за повышенного дисбаланса вала.
Раскрытие изобретения.
Задачей данного изобретения является создание способа контроля работоспособности турбомашины по динамической составляющей осевых перемещений ротора, характеризующей изгиб оси вращающегося вала от дисбаланса.
Эта задача в предлагаемом изобретении решена за счет того, что динамическую составляющую осевого перемещения вала определяют путем регистрации сигналов осевых перемещений диаметрально противоположных торцевых периферийных частей вала и значений оборотов вала на каждом стационарном режиме работы турбомашины (в скользящем временном окне) с частотой, превышающей частоту вращения вала (для исключения эффекта алиазинга), затем полученные сигналы осевых перемещений фильтруют полосовым фильтром в районе роторной частоты, из полученных сигналов удаляют дефект фильтрации, вычисляют сумму отфильтрованных сигналов осевых перемещений диаметрально противоположных торцевых периферийных частей вала, и если сигналы отфильтрованных осевых перемещений диаметрально противоположных торцевых периферийных частей вала пересекают предельный диапазон больше чем заданное число раз, а их сумма не пересекает заданный диапазон, то происходит выключение турбомашины.
Осуществление изобретения.
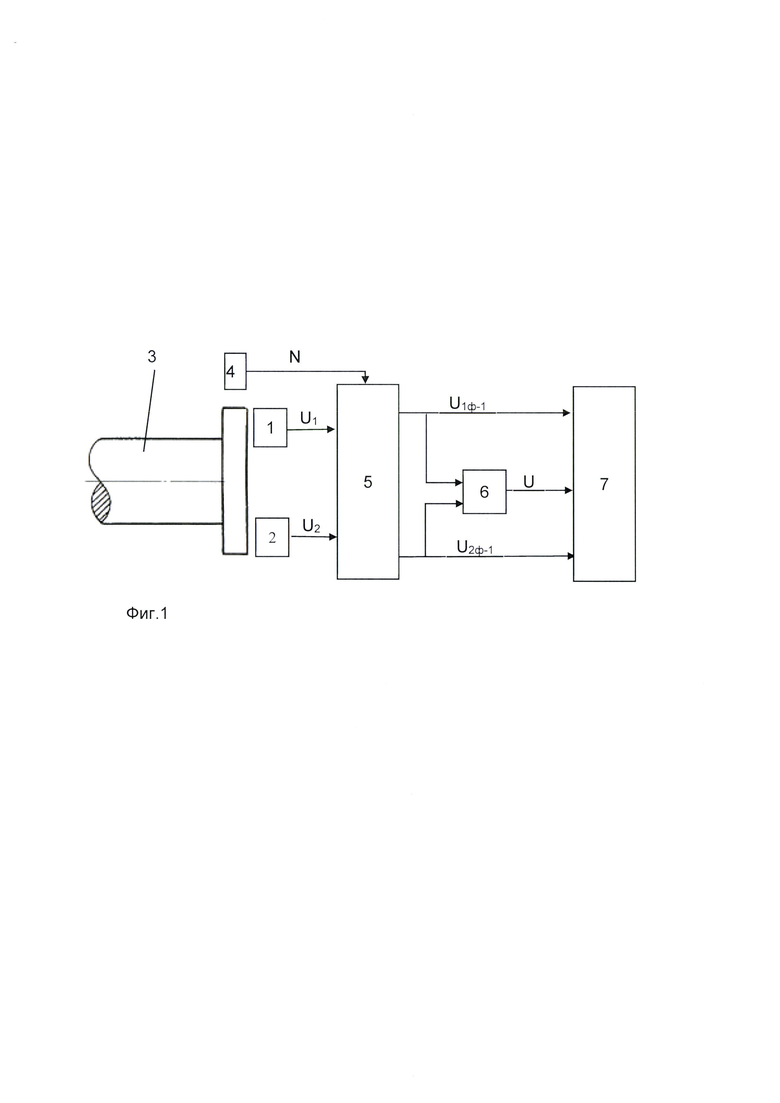
Суть изобретения схематически поясняется фиг. 1, где представлена схема для реализации способа. На фиг. 2-8 представлен пример работы турбомашины при нормальном испытании.
На фиг. 1 представлены датчики 1 и 2 линейных перемещений, расположенные диаметрально противоположно относительно торцевой периферийной части вала 3 турбомашины с гарантийным зазором и датчик 4 оборотов вала. Эти датчики 1, 2 и 4 подключены в блок фильтрации 5, который осуществляет фильтрацию сигнала и передает отфильтрованный сигнал в блок суммирования сигналов 6. Из блока фильтрации 5 и блока суммирования сигналов 6 информация направляется в блок определения аварийного состояния 7.
Пример осуществления способа.
В рассматриваемом примере для исключения эффекта алиазинга (выделение ложных низкочастотных процессов из-за низкой частоты опроса истинных высокочастотных процессов) частота регистрации осевых перемещений (U1, U2) диаметрально противоположных торцевых периферийных частей вала составляет 5 кГц, при максимальной частоте вращения ротора (вала) 400 Гц.
Проводят испытание турбомашины по циклограмме, содержащей стационарные режимы.
В процессе работы турбомашины на каждом стационарном режиме, в плавающем временном окне, датчики 1 и 2 регистрируют сигнал, состоящий из постоянной составляющей, соответствующей осевому перемещению, и переменной, обусловленной биением торцевой периферийной части вала 3 относительно датчиков 1 и 2 вследствие неперпендикулярности торца. Колебания сигналов происходят на частоте вращения вала 3, которую регистрирует датчик оборотов 4. С датчиков 1 и 2 поступают два сигнала U1, U2 (примеры сигналов U1 и U2 приведены на фиг. 2 и 3), имеющие одинаковые по величине постоянные и переменные составляющие, по переменной составляющей сигналы сдвинуты по фазе на 180°. С датчика 4 поступают значения оборотов ротора (вала) турбомашины N (пример сигнала оборотов ротора (вала) приведен на фиг. 4).
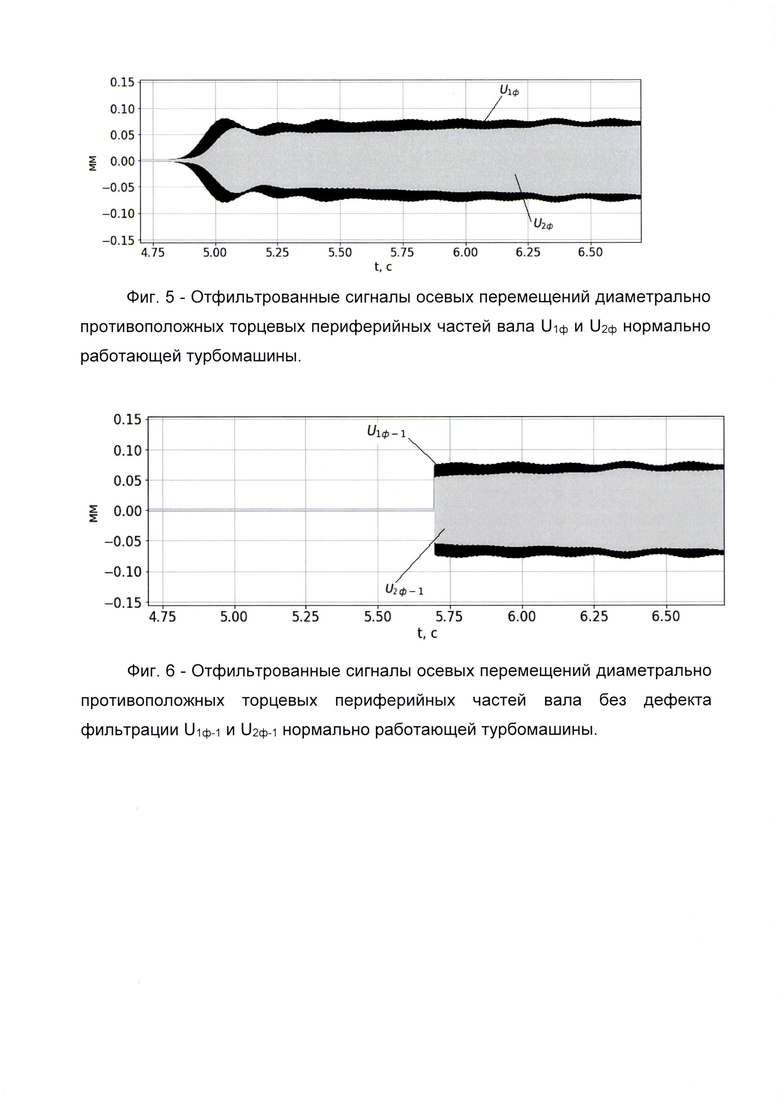
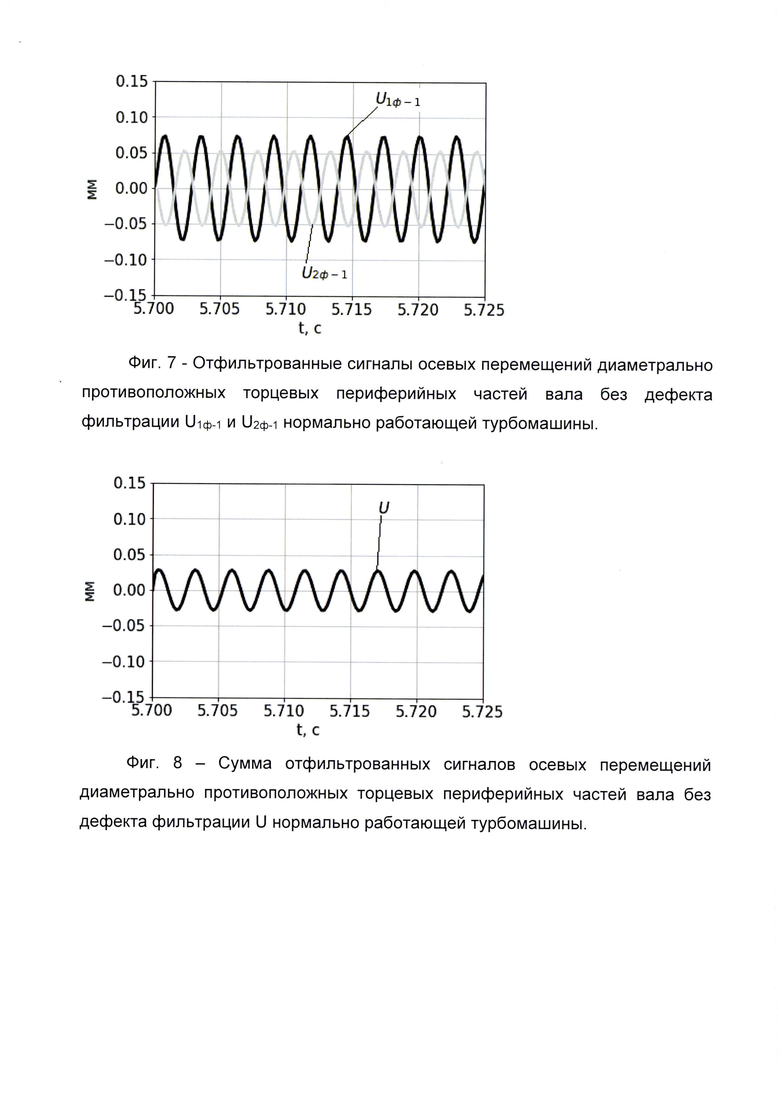
Полученные сигналы с датчиков 1, 2, 4 направляются в блок фильтрации 5. В данном блоке сначала определяют средние значения оборотов вала, затем, в диапазоне частот близких к роторной частоте N, сигналы U1 и U2 осевых перемещений фильтруют полосовым фильтром получая сигналы осевых перемещений U1ф и U2ф (пример сигналов U1ф и U2ф приведен на фиг. 5). Далее из полученных отфильтрованных сигналов U1ф и U2ф удаляют дефект фильтрации, путем удаления начальной искаженной части сигналов, получая отфильтрованные сигналы осевых перемещений без дефекта фильтрации U1ф-1, U2ф-1 (пример сигналов U1ф-1, U2ф-1 приведен на фиг. 6 и 7), которые направляют в блок суммирования отфильтрованных сигналов 6 и в блок определения аварийного состояния 7.
Далее в блоке суммирования отфильтрованных сигналов 6 по формуле (1) вычисляют сумму U отфильтрованных сигналов осевых перемещений диаметрально противоположных торцевых периферийных частей вала без дефекта фильтрации U1ф-1, U2ф-1 и направляют эту сумму U (пример сигнала суммы U приведен на фиг. 8) в блок определения аварийного состояния 7.

Далее в блоке определения аварийного состояния 7 проверяют критерий на формирование команды на выключение двигателя. Данный критерий состоит в том, чтобы отфильтрованные сигналы осевых перемещений без дефекта фильтрации (U1ф-1 и U2ф-1) пересекали диапазон [-U*; U*] больше заданного числа раз, а сигнал суммы осевых перемещений диаметрально противоположных торцевых периферийных частей вала (U) не пересекал диапазон [-Up*; Up*], что определяет достоверность записи сигналов осевых перемещений. При выполнении указанного критерия, блок определения аварийного состояния 7 выдает аварийный сигнал на выключение турбомашины.
Промышленное применение.
Данное изобретение найдет применение при эксплуатации турбомашин, например, жидкостного ракетного двигателя (ЖРД). Использование изобретения позволяет повысить безопасность эксплуатации и испытания турбомашин, в частности ЖРД, путем заблаговременного формирования команды на аварийное выключение при обнаружении критического изгиба оси вращающегося вала от дисбаланса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сигнализации аварийного состояния турбомашины | 1985 |
|
SU1321843A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ВАЛА | 1996 |
|
RU2129212C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ РАЗНОСТИ ФАЗ СВЧ-СИГНАЛОВ (ВАРИАНТЫ) | 1996 |
|
RU2109303C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА НА ЭТАПЕ ВНУТРЕННЕЙ БАЛЛИСТИКИ | 2021 |
|
RU2793829C2 |
| Способ определения угла разворота лопаток рабочего колеса турбомашины | 1990 |
|
SU1740979A1 |
| Устройство для обнаружения трещин в рабочих лопатках турбомашины | 1983 |
|
SU1101706A1 |
| АКУСТИЧЕСКИЙ ДЕТЕКТОР ДЕФЕКТОВ ПОДШИПНИКОВ | 2008 |
|
RU2395421C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584723C1 |
| ТЕПЛОВОЙ КАВИТАЦИОННЫЙ ГЕНЕРАТОР | 2010 |
|
RU2422733C1 |
| Способ диагностики форм резонансных колебаний лопаток рабочего колеса турбомашины | 2016 |
|
RU2614458C1 |

Изобретение относится к контрольно-измерительной технике и может быть использовано при контроле работы турбомашины по осевым перемещениям диаметрально противоположных торцевых периферийных частей вала в качестве одного из каналов системы аварийной защиты. Способ контроля работоспособности турбомашины осуществляют по динамической составляющей осевого перемещения вала. Способ предусматривает регистрацию сигналов осевых перемещений и значений оборотов вала на каждом стационарном режиме работы турбомашины (в скользящем временном окне) с частотой, превышающей частоту вращения вала, затем полученные сигналы осевых перемещений фильтруют полосовым фильтром в районе роторной частоты, из полученных сигналов удаляют дефект фильтрации, вычисляют сумму отфильтрованных сигналов осевых перемещений, и если сигналы отфильтрованных осевых перемещений диаметрально противоположных торцевых периферийных частей вала пересекают предельный диапазон больше чем заданное число раз, а их сумма не пересекает заданный диапазон, то происходит выключение турбомашины. Технический результат способа заключается в повышении безопасности эксплуатации и испытания турбомашин путем заблаговременного формирования команды на аварийное выключение при обнаружении критического изгиба оси вращающегося вала от дисбаланса. 8 ил.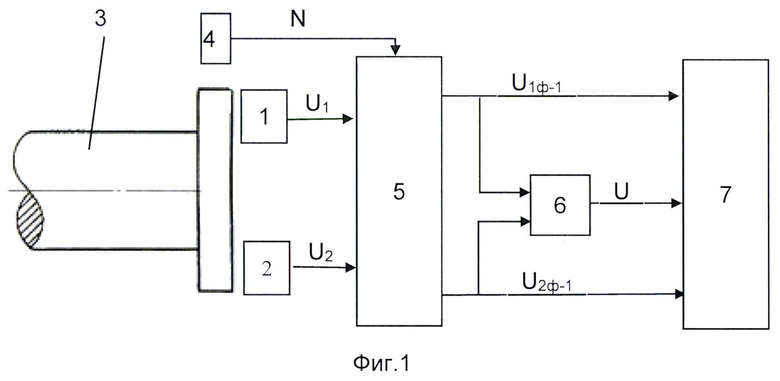
Способ контроля работоспособности турбомашины, основанный на регистрации в физической размерности значений осевых перемещений диаметрально противоположных торцевых периферийных частей вала, отличающийся тем, что динамическую составляющую осевого перемещения вала определяют путем регистрации сигналов осевых перемещений диаметрально противоположных торцевых периферийных частей вала и значений оборотов вала на каждом стационарном режиме работы турбомашины в скользящем временном окне с частотой, превышающей частоту вращения вала, затем полученные сигналы осевых перемещений фильтруют полосовым фильтром в районе роторной частоты, из полученных сигналов удаляют дефект фильтрации, вычисляют сумму отфильтрованных сигналов осевых перемещений диаметрально противоположных торцевых периферийных частей вала, и если сигналы отфильтрованных осевых перемещений диаметрально противоположных торцевых периферийных частей вала пересекают предельный диапазон больше чем заданное число раз, а их сумма не пересекает заданный диапазон, то происходит выключение турбомашины.
| Способ сигнализации аварийного состояния турбомашины | 1985 |
|
SU1321843A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ВАЛА | 1996 |
|
RU2129212C1 |
| СПОСОБ ИЗМЕРЕНИЯ МНОГОМЕРНЫХ ПЕРЕМЕЩЕНИЙ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2272990C2 |
